Pastāvīgs elektromagnētiskais motora ģenerators
Šis raksts ir veltīts vienkārša oriģināla jauna tipa "mūžīgā" elektromagnētiskā motora ģeneratora darbības principa, konstrukciju un elektriskās ķēdes izstrādei un aprakstam ar elektromagnētu uz statora un tikai vienu pastāvīgo magnētu (PM) uz statora. rotoru, ar šī PM rotāciju šī elektromagnēta darba spraugā.
MŪŽĪGS ELEKTROMAGNĒTISKS MOTORS ĢENERATORS AR ELEKTROMAGNĒTU UZ STATORA UN MAGNĒTU UZ ROTORA
1. Ievads
2. Cik daudz enerģijas ir paslēpts pastāvīgajā magnētā un no kurienes tā rodas?
3. Īss elektromagnētisko motoru un ģeneratoru ar PM apskats
4. Modernizētā elektromagnētiskā motora-ģeneratora ar maiņstrāvas elektromagnētu konstrukcijas un elektrotehnikas apraksts.
5. Reversīvs elektromagnētiskais motors ar ārējo PM uz rotora
6. "Mūžīgā" elektromagnētiskā motora-ģeneratora darba apraksts
7. Nepieciešamie mezgli un vadības algoritmi šī elektromagnētiskā motora ģeneratora darbībai "mūžīgās kustības" režīmā
8. Apgrieztās elektriskās strāvas algoritms elektromagnēta tinumā atkarībā no magnētiskā stāvokļa
9. EMDG elementu un aprīkojuma izvēle un aprēķins
10. Zemu izmaksu elektromagnēts EMD (projektēšanas un aprēķina pamati)
11. Pareiza EMD rotora pastāvīgo magnētu izvēle
12. Elektroģeneratora izvēle EMDG prototipēšanai
13. Perpetual slēģu elektromagnētiskais motors-ģenerators
14. Pastāvīgs elektromagnētiskais motors uz parastā indukcijas elektriskā skaitītāja
15. Jaunā EMDH energoefektivitātes salīdzinājums ar analogiem
16. Secinājums
IEVADS
Problēma par mūžīgo kustību mašīnu radīšanu daudzus gadsimtus aizrauj daudzu izgudrotāju un zinātnieku prātus visā pasaulē un joprojām ir aktuāla.
Pasaules sabiedrības interese par šo "mūžīgo kustību mašīnu" tēmu joprojām ir milzīga un pieaug, jo pieaug civilizācijas enerģijas vajadzības un saistībā ar organisko neatjaunojamo degvielu drīzu izsīkumu, un jo īpaši saistībā ar civilizācijas globālā enerģētikas un vides krīze. Nākotnes sabiedrības veidošanā, protams, ir svarīgi attīstīt jaunus enerģijas avotus, kas spēj apmierināt mūsu vajadzības. Un šodien Krievijai un daudzām citām valstīm tas ir vienkārši vitāli svarīgi. Valsts atveseļošanās nākotnē un gaidāmajā enerģētikas krīzē noteikti būs nepieciešami jauni enerģijas avoti, kuru pamatā ir revolucionāras tehnoloģijas.
Daudzu talantīgu izgudrotāju, inženieru un zinātnieku acis jau sen ir saistītas ar pastāvīgajiem magnētiem (PM) un to noslēpumaino un apbrīnojamo enerģiju. Turklāt šī interese par PM pēdējos gados ir pat palielinājusies, pateicoties ievērojamam progresam spēcīgu PM izveidē un daļēji ierosināto magnētisko motoru (MF) konstrukciju vienkāršības dēļ.
Cik daudz enerģijas slēpjas pastāvīgajā magnētā un no kurienes tā nāk?
Ir acīmredzams, ka mūsdienu kompaktie un jaudīgie PM satur ievērojamu magnētiskā lauka latento enerģiju. Un šādu magnētisko motoru un ģeneratoru izgudrotāju un izstrādātāju mērķis ir izolēt un pārvērst šo PM latento enerģiju cita veida enerģijā, piemēram, magnētiskā rotora nepārtrauktas rotācijas mehāniskajā enerģijā vai elektrībā. Ogles sadegšanas laikā izdala 33 J uz gramu, nafta, kam pēc 10-15 gadiem mūsu valstī sāks beigties, izdala 44 J uz gramu, grams urāna dod 43 miljardus J enerģijas. Teorētiski pastāvīgais magnēts satur 17 miljardus džoulu enerģijas. par vienu gramu. Protams, tāpat kā ar parastajiem enerģijas avotiem, magnēta efektivitāte nebūs simtprocentīga, turklāt ferīta magnēta kalpošanas laiks ir aptuveni 70 gadi, ja tas nav pakļauts spēcīgai fiziskai, temperatūras un magnētiskai slodzei, tomēr , ar tādu enerģijas daudzumu, kas atrodas viņā enerģiju, tas nav tik svarīgi. Turklāt jau ir masveidā ražoti industriālie magnēti no retajiem metāliem, kas ir desmit reizes stiprāki par ferīta magnētiem un līdz ar to arī efektīvāki. Magnētu, kas zaudējis spēku, var vienkārši "uzlādēt" ar spēcīgu magnētisko lauku. Tomēr zinātnē paliek atklāts jautājums “no kurienes PM nāk tik daudz enerģijas”. Daudzi zinātnieki uzskata, ka enerģija PM nepārtraukti nāk no ārpuses no ētera (fiziskā vakuuma). Un citi pētnieki apgalvo, ka tas vienkārši rodas pats par sevi PM magnetizētā materiāla dēļ. Pagaidām skaidrības nav.
ĪSS PĀRSKATS PAR ZINĀMĀM ELEKTROMAGNĒTISKO MOTORU UN ĢENERATORU
Pasaulē jau ir daudz patentu un inženiertehnisko risinājumu dažādu konstrukciju magnētiskajiem motoriem, taču praktiski vēl nav izstādīti tādi darbojošies MD “perpetual motion” režīmā. Un līdz šim “mūžīgie” industriālie magnētiskie motori (IM) nav radīti un apgūti sērijveidā un netiek ieviesti realitātē, un vēl jo vairāk – tie vēl nav atvērti pārdošanā. Diemžēl internetā labi zināmā informācija par sērijveida magnētiskajiem motoru ģeneratoriem no Perendevas (Vācija) un Akoil-energy vēl nav apstiprināta patiesībā. Ir daudzi iespējamie iemesli lēnam reālajam progresam metālu ražošanā MD, taču acīmredzot ir divi galvenie iemesli: vai nu šo izstrādņu klasifikācijas dēļ tie netiek nodoti masveida ražošanā vai arī eksperimentālo rūpniecisko paraugu zemā energoefektivitāte. no MD. Jāatzīmē, ka dažas problēmas, kas saistītas ar tīri magnētisku motoru izveidi ar mehāniskiem kompensatoriem un magnētiskiem ekrāniem, piemēram, aizkaru tipa MD, zinātne un tehnoloģija vēl nav pilnībā atrisinājusi.
Dažu zināmu MD klasifikācija un īsa analīze
- Magnētiski mehāniskie magnētiskie motori Dudyshev/1-3/. Ar savu konstruktīvo izsmalcinātību tie var labi darboties “mūžīgās kustības” režīmā.
- Dzinējs MD Kaļiņina- nedarbīgs virzuļdzinējs MD ar rotējošu magnētisko ekrānu - MD atsperes kompensatora dēļ nav novests pie pareizā konstrukcijas risinājuma.
- Elektromagnētiskais motors "Perendev"- klasisks elektromagnētiskais motors ar PM uz rotora un kompensatoru, kas nedarbojas bez komutācijas procesa vietās, kur iet cauri rotora turēšanas ar PM mirušie punkti. Tajā ir iespējami divi pārslēgšanās veidi (ļaujot iziet cauri rotora PM "turēšanas punktam" - mehāniskajam un elektromagnētiskajam. Pirmais automātiski samazina problēmu līdz cilpai SMOT'a versijai (un ierobežo rotācijas ātrumu, un tātad jauda), otrais ir mazāks. "Perpetual engine" nevar darboties.
- Minato elektromagnētiskais motors- klasisks piemērs elektromagnētiskajam motoram ar PM rotoru un elektromagnētisko kompensatoru, kas nodrošina "turēšanas punkta" (pēc Minato, "sabrukšanas punkta") magnētiskā rotora pāreju. Principā tas ir tikai strādājošs elektromagnētiskais motors ar paaugstinātu efektivitāti. Maksimālā sasniedzamā efektivitāte ir aptuveni 100% nedarbojama "mūžīgajā" MD režīmā.
- Džonsona motors- Perendev elektromagnētiskā motora analogs ar kompensatoru, bet ar vēl mazāku enerģiju.
- Shkondin magnētiskais motora ģenerators- elektromagnētiskais motors ar PM, kas darbojas uz PM magnētiskās atgrūšanas spēkiem (bez kompensatora). Tas ir strukturāli sarežģīts, ar kolektora-birstes komplektu, tā efektivitāte ir apmēram 70-80%. Nedarbojas mūžīgajā MD režīmā.
- Adamsa elektromagnētiskais motora ģenerators- tas patiesībā ir vismodernākais no visiem zināmajiem - elektromagnētiskais motora ģenerators, kas darbojas kā Škondina motora ritenis, tikai uz PM magnētiskās atgrūšanas spēkiem no elektromagnētu galiem. Bet šis uz PM balstītais motora ģenerators ir strukturāli daudz vienkāršāks nekā Shkondin magnētiskais motora ģenerators. Principā tā efektivitāte var tuvoties tikai 100%, bet tikai tad, ja elektromagnēta tinumu pārslēdz īss augstas intensitātes impulss no uzlādēta kondensatora. Nedarbojas "mūžīgajā" MD režīmā.
- Dudysheva elektromagnētiskais motors. Reversīvs elektromagnētiskais motors ar ārējo magnētisko rotoru un centrālā statora elektromagnētu). Tā efektivitāte nav lielāka par 100%, pateicoties magnētiskās ķēdes atvērtībai /3/. Šis EMD ir pārbaudīts darbībā (ir pieejams izkārtojuma fotoattēls).
Ir zināmi arī citi EMD, taču tiem ir aptuveni vienādi darbības principi. Bet, neskatoties uz to, magnētisko motoru teorijas un prakses attīstība pasaulē joprojām pamazām turpinās. Un īpaši taustāms reāls progress MD ir precīzi iezīmēts zemu izmaksu kombinētajos magneto-elektromagnētiskajos motoros, kuros tajos tiek izmantoti ļoti efektīvi pastāvīgie magnēti. Šie pasaules sabiedrībai tik svarīgie tuvākie analogi - mūžīgo magnētisko motoru prototipi tiek saukti - elektromagnētiskie motorģeneratori (EMDG) ar elektromagnētiem un pastāvīgajiem magnētiem uz statora vai rotora. Turklāt tie jau patiešām pastāv, tiek pastāvīgi uzlaboti, un pat daži no tiem jau tiek ražoti masveidā. Internetā parādījās diezgan daudz ziņojumu un rakstu par to dizainiem ar fotogrāfijām un viņu eksperimentālajiem pētījumiem. Piemēram, ir zināmi efektīvi, jau metālā pārbaudīti, salīdzinoši lēti Adams elektromagnētiskie motorģeneratori /1/. Turklāt daži no vienkāršākajiem kombinēto EMDG dizainiem jau ir sasnieguši sērijveida ražošanu un masveida ieviešanu. Tie ir, piemēram, Shkondin sērijas elektromagnētiskie motorriteņi, ko izmanto elektriskajos velosipēdos.
Tomēr visu zināmo EMDG konstrukcijas un energotehnika joprojām ir diezgan neefektīva, kas neļauj tiem darboties "perpetual motion" režīmā, t.i. bez ārēja barošanas avota.
Tomēr ir veidi, kā konstruktīvi un radikāli uzlabot zināmos EMDG. Un tieši šādas enerģētiski progresīvākas iespējas var tikt galā ar šo sarežģīto uzdevumu - pilnīgi autonomu darbību "mūžīgā" elektromagnētiskā motora ģeneratora režīmā - bez elektroenerģijas patēriņa no ārēja avota, un tās tiek apskatītas šajā rakstā.
Šis raksts ir veltīts jauna tipa vienkārša elektromagnētiskā motora ģeneratora oriģinālās konstrukcijas izstrādei un darbības principa aprakstam ar loka elektromagnētu uz statora un tikai ar vienu pastāvīgo magnētu (PM) uz rotora, ar šī PM polārā rotācija elektromagnēta spraugā, kas ir diezgan darbināms režīmā "perpetual motion ģenerators".
Iepriekš un daļēji šis tik neparastā polārā EMD dizains citā atgriezeniskā versijā jau ir pārbaudīts uz esošajiem raksta autora maketiem un ir parādījis funkcionalitāti un diezgan augstu energoefektivitāti.
Modernizētā EMDG konstrukcijas un elektriskās ķēdes apraksts
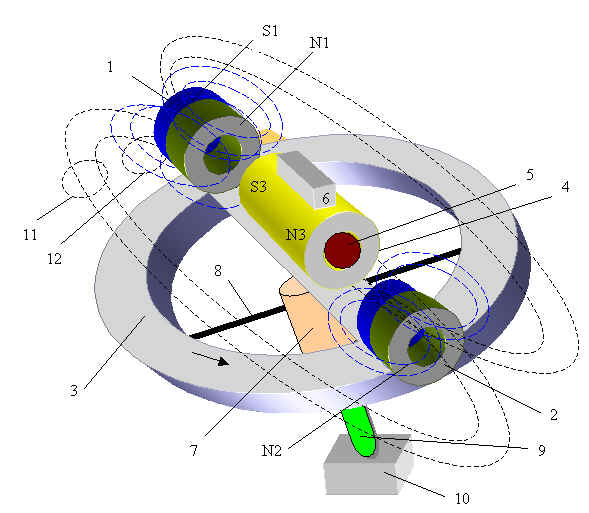
1. att. Elektromagnētiskais motora ģenerators ar PM uz rotora, ārēju maiņstrāvas elektromagnētu uz statora un elektrisko ģeneratoru uz magnētiskā rotora vārpstas
Šāda veida elektromagnētiskā motora ģeneratora (EMG) un tā elektriskās daļas vienkāršota konstrukcija ir parādīta attēlā. 1. Tas sastāv no trim galvenajām vienībām - tieši no DM ar elektromagnētu uz statora un PM uz rotora un elektromehāniskā ģeneratora uz vienas vārpstas ar DM. MD ierīce sastāv no statora statiskā elektromagnēta 1, kas izgatavots uz gredzenveida segmenta ar izgriezumu vai uz loka magnētiskās ķēdes 2 ar šī elektromagnēta induktīvo spoli 3 un elektroniskā slēdža strāvas maiņai tam pievienotajā spolē 3 un pastāvīgais magnēts (PM) 4, kas stingri novietots uz rotora 5 šī elektromagnēta darba spraugā 1. EMD rotora 5 rotācijas vārpsta ir savienota ar sajūgu ar elektriskā ģeneratora 8 vārpstu 7. Ierīce ir aprīkota ar vienkāršāko regulatoru - elektronisko slēdzi 6, (autonomais invertors), izgatavots pēc vienkārša tilta pusvadāma autonoma invertora shēmas, elektriski savienots ar izeju uz induktīvā tinuma 3 elektromagnēti 2 un caur barošanas ieeju - uz autonoms elektroenerģijas avots 10. Turklāt elektromagnēta 1 reversīvais induktīvais tinums 3 ir iekļauts šī slēdža 6 maiņstrāvas diagonālē un caur līdzstrāvas ķēdi šis slēdzis 6 ir savienots ar buferlīdzstrāvas avotu 10, piemēram, pie acc. elektriskās mašīnas ģeneratora 8 elektriskā izeja ir savienota vai nu tieši ar induktīvās spoles 3 tinumiem, vai caur starpposma elektronisko taisngriezi (nav parādīts) ar bufera līdzstrāvas avotu (AB tips) 7.
Tilta vienkāršākais elektroniskais slēdzis (autonomais invertors) ir izgatavots uz 4 pusvadītāju vārstiem, satur divus jaudas tranzistorus 9 un divus nevadāmus vienvirziena vadīšanas (diodes) bezkontakta taustiņus 10 tilta rokās. Divi pozīcijas sensori 11 PM magnēta ir novietoti arī uz šī rotora 6 MD 5 elektromagnētiskā statora 1, netālu no tā kustības trajektorijas 15, un kā rotora PM magnēta 5 pozīcijas sensori ir vienkārši magnētiskā kontakta sensori. lauka stiprums - tiek izmantoti niedru slēdži. Šie rotora 5 magnēta 4 pozīcijas sensori 11 ir novietoti kvadrātā - viens sensors atrodas netālu no solenoīda gala ar poliem un otrs ir nobīdīts par 90 grādiem (niedru slēdži), netālu no PM5 griešanās ceļa. Rotoru 6. Šo pozīcijas sensoru 11 PM 5 izejas ir niedres slēdži, releji caur pastiprinošu loģisko ierīci 12 ir savienoti ar tranzistoru 9 vadības ieejām. Noderīga elektriskā slodze 13 ir pievienota izejas tinumam. elektriskais ģenerators 8 caur slēdzi (nav parādīts) pārslēgt no līdzstrāvas palaišanas bloka uz pilnu barošanu no elektriskā ģeneratora 8 (nav parādīts).
Mēs atzīmējam šādas MD galvenās dizaina iezīmes salīdzinājumā ar analogiem:
1. Tiek izmantots vairāku apgriezienu ekonomisks zema ampēru loka elektromagnēts.
2. Rotora 5 pastāvīgais magnēts 4 griežas loka elektromagnēta 1 spraugā, tieši ar PM 5 pievilkšanas un atgrūšanas magnētiskajiem spēkiem. Sakarā ar magnētisko polu magnētiskās polaritātes izmaiņu spraugā. šis elektromagnēts, kad strāvas virziens elektromagnēta 3 spolē 1 pozicionēšanas sensoru komandu 11 PM no 5. rotora magnēta 4. Tāpat ņemam vērā, ka rotoru 5 vēlams izgatavot masīvu no nemagnētiska materiāla, lai veiktu noderīga inertioīda spararata funkcija.
Reversīvs elektromagnētiskais motors ar ārēju PM uz rotora
Principā iespējama arī EMD konstrukcijas atgriezeniskā versija, kurā rotors ar pastāvīgo magnētu PM uz loka ir novietots ārpus elektromagnēta. Iepriekš šādu atgriezeniskā EMD variantu izstrādāja raksta autors, izveidoja un veiksmīgi aprobēja darbā, un tālajā 1986. gadā. Zemāk, 2.,3.att., ir arī šāda iepriekš pārbaudīta vienkāršota konstrukcija. EMDG, kas aprakstīts iepriekš autora rakstos /2-3/
Vienkāršākā EMD izkārtojuma dizains (nepilnīgs) ar ārējo pastāvīgo magnētu uz rotora un ar noņemtu EMD statora elektromagnētu ir parādīts fotoattēlā (3. att.). Realitātē elektromagnēts regulāri tiek novietots cilindriskā dielektriskā nemagnētiskā caurspīdīgā cilindra centrā ar augšējo vāku, uz kura ir piestiprināta šī EMD rotācijas vārpsta. Slēdzis un cita elektrība nav redzama fotoattēlā.
2. att. Reversīvs EMDG ar ārēju MP magnētisko rotoru (nepilnīga konstrukcija)
Apzīmējumi:
1. Pastāvīgais magnēts (PM1)
2. Pastāvīgais magnēts (PM2)
3. EMD gredzenveida rotors (PM1.2 stingri novietots uz rotora)
4. fiksēta statora elektromagnēta tinums (neatkarīga balstiekārta)
5. solenoīda magnētiskā ķēde
6. PM rotora pozīcijas sensori
7. Rotora vārpsta (nemagnētiskais gultnis)
8. gredzenveida rotora un tā vārpstas mehāniskie savienojuma spieķi
9. atbalsta vārpsta
10. atbalsts
11. elektromagnēta jaudas magnētiskās līnijas
12. pastāvīgā magnēta magnētiskās līnijas Bultiņa parāda rotora griešanās virzienu 3

3. att. Vienkāršākā EMDG izkārtojuma fotoattēls (ar noņemtu elektromagnētu)
"Mūžīgā" elektromagnētiskā motora ģeneratora darba apraksts (1. att.)
Ierīce - šis mūžīgais elektromagnētiskais motors - ģenerators (1. att.) darbojas šādi.
Magnētiskā rotora EMDG iedarbināšana un paātrināšana līdz vienmērīgam ātrumam
EMDG tiek palaists, pievadot elektrisko strāvu elektromagnēta 2 spolei 3 no barošanas bloka 10. Rotora pastāvīgā magnēta 4 magnētisko polu sākotnējais stāvoklis ir perpendikulārs elektromagnēta 2 spraugai. Polaritāte elektromagnēta magnētisko polu daļa šajā gadījumā notiek tā, ka rotora 5 pastāvīgais magnēts 4 magnētisko spēku ietekmē sāk griezties ap savu rotācijas asi 16, ar magnētiskajiem poliem to pievelkot elektromagnēta 2 pretējam magnētiskajam polam. Šajā magnēta 4 pretējo magnētisko polu un elektromagnēta 2 spraugā esošo galu sakritības brīdī strāva spolē 3 tiek izslēgta ar magnētiskā niedru releja komandu (vai šīs strāvas sinusoīds iet caur nulli) un pēc inerces masīvais rotors šķērso šo savas trajektorijas mirušo punktu kopā ar PM 4. Pēc tam tiek mainīts strāvas virziens spolē 3 un elektromagnēta 2 magnētiskie poli šajā darba spraugā kļūst tādi paši kā magnētiskie. pastāvīgā magnēta stabi 4. Rezultātā magnētiskās atgrūšanās spēki Iya magnētiskie stabi ar tādu pašu nosaukumu - pastāvīgā magnēta 4 rotori un pats rotors saņem papildu paātrinājuma momentu, kas darbojas rotora griešanās virzienā tajā pašā virzienā. Pēc PM rotora magnētisko polu stāvokļa sasniegšanas - tam griežoties - pa magnētisko meridiānu, spolē 3 atkal mainiet strāvas virzienu pēc otrā magnētiskā stāvokļa sensora 11, magnētisko polu apvērsuma. elektromagnēts 2 atkal rodas darba spraugā un pastāvīgais magnēts 4 atkal sāk pievilkties pie tuvākajiem pretējiem elektromagnēta 2 magnētiskajiem poliem griešanās virzienā tā spraugā. Un pēc tam PM 4 un rotora paātrināšanas process - cikliski apgriežot elektrisko strāvu spolē 3, cikliski izslēdzot slēdža 7 tranzistorus 8 no rotora PM pozīcijas sensoriem 11, tiek atkārtoti cikliski atkārtots. Un tajā pašā laikā, kad PM 4 un rotors 5 paātrina, elektriskās strāvas maiņas biežums spolē 3 automātiski palielinās, jo šajā elektromehāniskajā sistēmā ir pozitīva atgriezeniskā saite gar ķēdi caur komutatoru un pozīcijas sensoriem. rotora PM 4.
Ņemiet vērā, ka elektriskās strāvas virziens spolē 3 (parādīts ar bultiņām 1. attēlā) mainās atkarībā no tā, kurš no 7. slēdža tranzistoriem 8 ir atvērts. Mainot tranzistoru pārslēgšanas frekvenci, mēs mainām maiņstrāvas frekvenci elektromagnēta spolē 3 un attiecīgi mainām rotora 5 PM 4 rotācijas ātrumu.
SECINĀJUMS: Tādējādi rotora pastāvīgais magnēts pilnīgam apgriezienam ap savu asi gandrīz nepārtraukti piedzīvo vienvirziena paātrinājuma momentu no spēka magnētiskās mijiedarbības ar elektromagnēta magnētiskajiem poliem, kas ieslēdz to rotācijā un pakāpeniski paātrina to un elektrisko ģeneratoru. uz kopējas rotācijas vārpstas līdz noteiktam vienmērīga ātruma rotācijai.
Tiešā statora elektromagnēta EMDG tinuma elektriskās vadības metode atkarībā no rotora PM stāvokļa
Papildu jauninājums, lai nodrošinātu šādu elektromagnēta 3 MD tinuma vadīšanas metodi ar vajadzīgās frekvences un fāzes maiņstrāvu tieši no maiņstrāvas ģeneratora izejas līdzsvara režīmā, ir magnētiskā motora ieviešana šādā sistēmā. - elektriskais ģenerators - paralēla rezonanses L-C ķēde - ķēdē ir divas induktivitātes - no spoles 3 un ģeneratora statora tinuma un papildu elektriskās jaudas ievadīšana papildu elektriskā kondensatora 17 izejas elektriskajā ķēdē ģeneratora 8, lai nodrošinātu tā pašieksigasme un tai sekojošā elektriskā L-C rezonanse, lai samazinātu elektriskos zudumus un ārkārtīgi vienkārši kontrolētu induktivitāti 3, mainot maiņstrāvu ar vēlamo spriegumu un strāvas fāzi tieši no ģeneratora 8.
Pilnībā autonoms režīms ("perpetuum mobile") EMDG
Ir pilnīgi skaidrs, ka, lai nodrošinātu šīs ierīces darbību "perpetual motion" režīmā, ir nepieciešams iegūt brīvu enerģiju no rotora pastāvīgajiem magnētiem, kas ir pietiekama elektriskā ģeneratora ģenerēšanai uz EMD vārpstas. šai pilnīgi autonomai sistēmas darbībai - elektrība. Tāpēc vissvarīgākais nosacījums ir nodrošināt, lai šī MD magnētiskajam rotoram būtu pietiekams griezes moments, lai uz tā vārpstas ģenerētu pietiekamu elektroenerģijas daudzumu, kas būtu vairāk nekā pietiekami, lai darbinātu elektromagnēta spoli, noteiktas vērtības lietderīgo slodzi un kompensētu. par dažādiem neizbēgamiem zaudējumiem šādās elektromehāniskās sistēmās ar PM uz rotora. Pēc tam, kad PM 4 ir attīts un rotors sasniedz 5 nominālos apgriezienus, mēs pārslēdzam spoles 3 strāvas padevi tieši no elektriskā ģeneratora vai caur papildu sprieguma pārveidotāju, un startera barošanas avots tiek pilnībā izslēgts vai ieslēgts uzlādes režīmā. no elektriskā ģeneratora uz šī EMD vārpstas.
NEPIECIEŠAMS STRUKTŪRAS MONTĀŽAS UN VADĪBAS ALGORITMI ŠĪ MOTORA ĢENERATORA DARBĪBAI “PPERP MOBILE” REŽĪMĀ
Šo svarīgo nosacījumu DM darbībai "mūžīgās kustības" režīmā var izpildīt tikai tad, ja vienlaikus ir izpildīti vismaz seši nosacījumi:
1. modernu spēcīgu niobija pastāvīgo magnētu izmantošana MD, kas nodrošina šāda rotora maksimālo griezes momentu ar minimāliem PM izmēriem.
2. efektīvas īpaši zemu izmaksu MD elektromagnētu ķēdes izmantošana uz MD statora, jo elektromagnēta tinumā ir ārkārtīgi liels apgriezienu skaits un tā magnētiskās ķēdes un tinuma pareiza un efektīva konstrukcija.
3. nepieciešamība pēc palaišanas ierīces un startera elektroenerģijas avota, lai palaistu un paātrinātu MD ar elektromagnēta spoles barošanu no slēdža.
4. pareizs algoritms elektriskās strāvas regulēšanai elektromagnēta tinumā virzienā, lielumā, atkarībā no rotora PM stāvokļa.
5. elektroģeneratora elektrisko parametru un elektromagnēta tinuma saskaņošana.
6. pareizs algoritms elektromagnēta tinuma barošanas ķēžu pārslēgšanai, kad elektromagnētiskā tinuma barošanas ķēdē ir ieslēgta elektriskā ģeneratora ķēde un no izlādes režīma tiek pārsūtīts elektroenerģijas sākuma avots, piemēram, AB. uz tā elektriskās uzlādes režīmu.
ALGORITMS ELEKTROSTRAVES PĀRSLĒGŠANAI ELEKTROMAGNETA SPOLĒ ATKARĪBĀ NO EMD ROTORA PM NOSTĀJAS (1. att.)
Apskatīsim algoritmu elektriskās strāvas pārslēgšanai spolē viena stieņa magnēta klātbūtnē uz EMD rotora uz vienu rotora apgriezienu (3.att.) Lai nodrošinātu šī EMD efektīvu darbību (1.att. dizains) , izmantojot kombinētās diagrammas par rotora stāvokli un strāvas plūsmas virzienu tinuma 3 statora elektromagnētā 1. Kā izriet no šīm diagrammām, pareizā elektromagnēta 1 EMD vadības algoritma būtība ir tāda, ka viens pilns PM rotora apgrieziens. elektriskā strāva elektromagnēta induktīvajā tinumā 3 rada divas pilnīgas svārstības .. Tas ir, citiem vārdiem sakot, elektriskās strāvas frekvence, kas tiek piegādāta elektromagnēta 1 tinumam 3 ar tam piestiprināta elektroniskā slēdža palīdzību, ko kontrolē. pēc rotora PM stāvokļa sensoru komandām, ir vienāds ar divkāršu rotora ātrumu, un šīs elektriskās strāvas fāze ir stingri sinhronizēta ar rotora PM pozīciju. EMD. Tā kā slēdzis pārslēdz strāvas virzienu tinumā 3 (strāvas reverss), tas notiek stingri uz PM magnētiskā ekvatora, kad PM magnētiskie poli un magnētiskās ķēdes galu magnētiskie poli sakrīt darba spraugā. elektromagnēta 1 magnētiskā ķēde 2, tad uz vienu pilnu rotora PM apgriezienu tas pastāvīgi piedzīvo paātrinātu vienvirziena griezes momentu un divas reizes no magnētiskās ķēdes galu pretējo magnētisko polu pievilkšanas. elektromagnēts un rotora PM, un divas reizes - to līdzīgu magnētisko polu atgrūšanas magnētisko spēku dēļ.
4. att. Elektroniskā slēdža darbības laika diagramma strāvas maiņai statora elektromagnēta tinumā uz vienu rotora PM apgriezienu
5. att. Magnētisko polu maiņas ciklogramma elektromagnēta spraugā vienam EMDG rotora PM apgriezienam
Uz elektromagnēta EMD algoritma skaidrojumu:
3.4 - elektromagnēta 1 loka magnētiskās ķēdes 2 galu magnētiskie stabi
Spole ar tinumu 3 tiek novietota uz elektromagnēta 1 magnētiskās ķēdes 2
9. rotora magnēts