DC motor
Stejnosměrný motor byl vynalezen dříve než jiné typy strojů, které přeměňují elektrickou energii na mechanickou energii. Přestože se v poslední době staly nejoblíbenějšími střídavé motory, existují aplikace, kde neexistuje alternativa ke stejnosměrným motorům.
DC a AC motor
Historie vynálezu
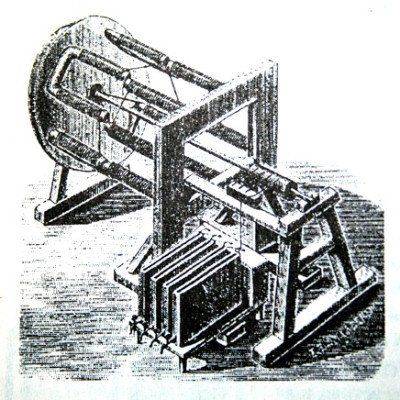
Elektromotor Jacobi.
Abychom porozuměli principu fungování stejnosměrných elektromotorů (stejnosměrných motorů), přejdeme k historii jejich vzniku. Takže první experimentální důkaz, že elektrická energie může být přeměněna na mechanickou energii, byla demonstrována Michaelem Faradayem. V roce 1821 provedl pokus s vodičem spuštěným do nádoby naplněné rtutí, na jejímž dně byl permanentní magnet. Po přivedení elektřiny na vodič se začal otáčet kolem magnetu, což demonstrovalo jeho reakci na magnetické pole přítomné v nádobě. Faradayův experiment nenašel praktické uplatnění, ale prokázal možnost vytvoření elektrických strojů a dal podnět k rozvoji elektromechaniky.
První stejnosměrný elektromotor, který byl založen na principu rotace pohyblivé části (rotoru), vytvořil ruský mechanický fyzik Boris Semenovič Jacobi v roce 1834. Toto zařízení fungovalo následovně:
Popsaný princip byl použit v motoru, který Jacobi v roce 1839 nainstaloval do člunu s 12 cestujícími. Loď se pohybovala trhaně rychlostí 3 km/h proti proudu (podle jiných zdrojů - 4,5 km/h), ale úspěšně překonala řeku a vysadila cestující na břehu. Jako zdroj energie byla použita baterie s 320 galvanickými články a pohyb probíhal pomocí lopatkových kol.
Další studium tohoto problému vedlo výzkumníky k vyřešení řady otázek týkajících se toho, které zdroje energie je nejlepší použít, jak zlepšit jeho výkon a optimalizovat jeho rozměry.
V roce 1886 Frank Julian Sprague poprvé zkonstruoval stejnosměrný elektrický motor, podobný designem těm, které se používají dnes. Implementoval princip samobuzení a princip reverzibility elektrického stroje. Do této doby všechny motory tohoto typu přešly na napájení z vhodnějšího zdroje – stejnosměrného generátoru.
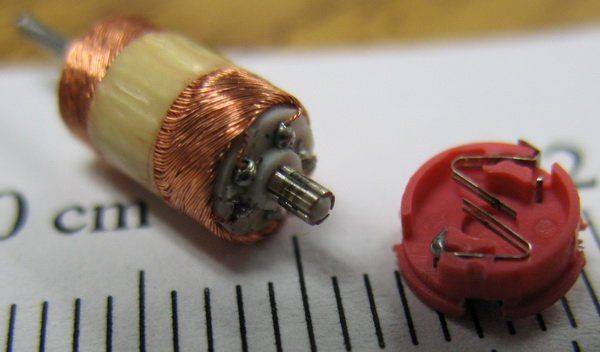
Sestava kartáč-kolektor zajišťuje elektrické propojení obvodu rotoru s obvody umístěnými ve stacionární části stroje
Zařízení a princip činnosti
V moderních DPT se používá stejný princip interakce nabitého vodiče s magnetickým polem. S vylepšováním technologií se zařízení pouze doplňuje o některé prvky zlepšující výkon. Například permanentní magnety se dnes používají pouze v motorech s nízkým výkonem, protože ve velkých strojích by zabíraly příliš mnoho místa.
Základní princip
Prvotní prototypy motorů tohoto typu byly znatelně jednodušší než moderní zařízení. Jejich primitivní zařízení obsahovalo pouze stator ze dvou magnetů a kotvu s vinutími, do kterých byl přiváděn proud. Po prostudování principu interakce magnetických polí určili konstruktéři následující algoritmus provozu motoru:
- Napájecí zdroj vytváří elektromagnetické pole na vinutí kotvy.
- Póly elektromagnetického pole se odpuzují od stejných pólů pole permanentního magnetu.
- Kotva se spolu s hřídelí, na které je uchycena, otáčí v souladu s odpudivým polem vinutí.
Tento algoritmus fungoval teoreticky dokonale, ale v praxi se tvůrci prvních motorů potýkali se specifickými problémy, které bránily provozu stroje:
- Mrtvá poloha, ze které nelze nastartovat motor – kdy jsou póly přesně orientovány před sebou.
- Nemožnost nastartovat kvůli silnému odporu nebo slabému odpuzování tyčí.
- Rotor se zastaví po jedné otáčkě. Je to dáno tím, že po projetí poloviny kruhu se přitahování magnetu nezrychlilo, ale zpomalilo rotaci rotoru.
Řešení prvního problému bylo nalezeno poměrně rychle - k tomu bylo navrženo použít více než dva magnety. Později bylo do motorového zařízení zahrnuto několik vinutí a sestava kolektor-kartáč, která v určitém okamžiku dodávala energii pouze jednomu páru vinutí.
Systém napájení kolektor-kartáčový proud řeší i problém brzdění rotoru - přepínání polarity probíhá až do okamžiku, kdy se rotace rotoru začne zpomalovat. To znamená, že během jedné otáčky motoru dojde minimálně ke dvěma přepólování.
Problém nízkých zapínacích proudů je diskutován níže v samostatné části.
Design
Na skříni motoru je tedy upevněn permanentní magnet, který s ním tvoří stator, uvnitř kterého je umístěn rotor. Po přivedení energie na vinutí kotvy vzniká elektromagnetické pole, které interaguje s magnetickým polem statoru, což vede k otáčení rotoru, který je pevně uložen na hřídeli. Pro přenos elektrického proudu ze zdroje na kotvu je motor vybaven sestavou kolektor-kartáč, která se skládá z:
- Kolektor. Jedná se o proudový kolektorový prstenec z několika sekcí oddělených dielektrickým materiálem, připojený k vinutí kotvy a namontovaný přímo na hřídeli motoru.
- Grafitové kartáče. Uzavírají obvod mezi kolektorem a zdrojem energie pomocí kartáčů, které jsou tlakovými pružinami přitlačovány ke kontaktním podložkám kolektoru.
Vinutí kotvy jsou jedním koncem spojena mezi sebou a druhým koncem s kolektorovými sekcemi, čímž tvoří obvod, po kterém protéká proud po následující trase: vstupní kartáč -> vinutí rotoru -> výstupní kartáč.
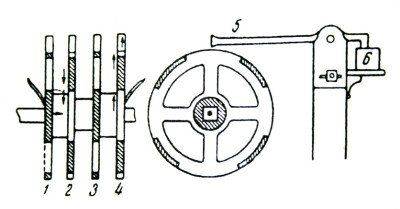
Uvedené schéma zapojení (obr. 3) demonstruje princip činnosti primitivního stejnosměrného motoru s kolektorem o dvou sekcích:
- V tomto příkladu budeme uvažovat výchozí polohu rotoru, jak je znázorněno na obrázku. Takže po přivedení energie do spodního kartáče označeného „+“ proud protéká vinutím a vytváří kolem něj elektromagnetické pole.
- Podle pravidla gimletu je severní pól kotvy vytvořen v levé dolní části a jižní pól je vytvořen vpravo nahoře. Jsou-li umístěny v blízkosti stejnojmenných pólů statoru, začnou se odpuzovat, čímž uvedou rotor do pohybu, který pokračuje, dokud nejsou opačné póly v minimální vzdálenosti od sebe, to znamená, že nedojdou do konečné polohy (obr. 1).
- Konstrukce kolektoru v této fázi povede k přepólování vinutí kotvy. V důsledku toho budou póly magnetických polí opět blízko a začnou se odpuzovat.
- Rotor se úplně otočí a kolektor opět přepóluje a pokračuje ve svém pohybu.
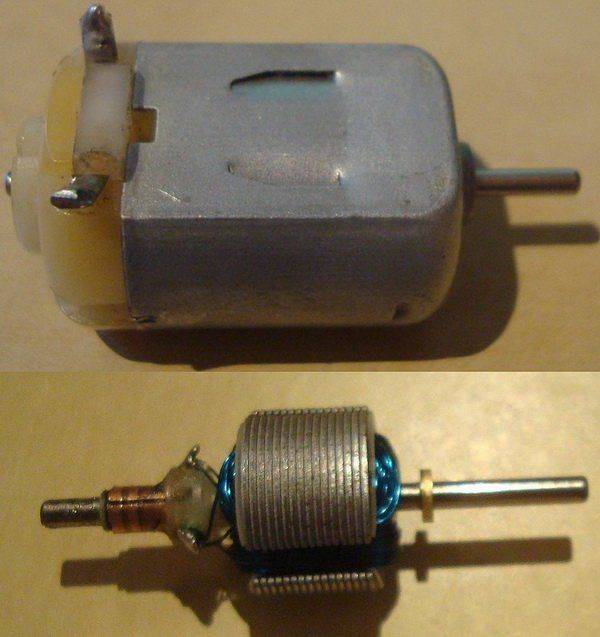
Díly DC motoru
Zde, jak již bylo uvedeno, je demonstrován princip fungování primitivního prototypu. Skutečné motory používají více než dva magnety a komutátor se skládá z více kontaktních podložek, což zajišťuje plynulé otáčení.
U motorů s vysokým výkonem není použití permanentních magnetů možné kvůli jejich velké velikosti. Alternativou pro ně je systém několika vodivých tyčí, z nichž každá má vlastní vinutí připojené k napájecím přípojnicím. Stejnojmenné póly jsou v síti zařazeny sériově. Na těle může být 1 až 4 páry pólů a jejich počet musí odpovídat počtu proudových sběračů na kolektoru.
Elektromotory určené pro vysoký výkon mají oproti svým „lehčím“ kolegům řadu funkčních výhod. Například místní uspořádání kartáčů pro sběr proudu je otáčí pod určitým úhlem vzhledem k hřídeli, aby kompenzovalo brzdění hřídele, nazývané "reakce kotvy".
Startovací proudy
Postupným vybavováním rotoru motoru přídavnými prvky, které zajišťují jeho nepřetržitý chod a vylučují sektorové brzdění, vzniká problém jeho rozběhu. To vše ale zvyšuje hmotnost rotoru - s přihlédnutím k odporu hřídele je obtížnější jej vytlačit z místa. Prvním řešením tohoto problému, které vás napadne, může být zvýšení proudu dodávaného na začátku, ale to může vést k nepříjemným následkům:
- jistič vedení nevydrží proud a vypne se;
- dráty vinutí vyhoří z přetížení;
- spínací sektory na kolektoru budou svařeny z přehřátí.
Proto lze takové rozhodnutí označit spíše za riskantní poloviční opatření.
Obecně je tento problém hlavní nevýhodou stejnosměrných motorů, ale zahrnuje jejich hlavní výhodu, kvůli které jsou v některých oblastech nepostradatelné. Tato výhoda spočívá v přímém přenosu točivého momentu ihned po rozběhu – hřídel (pokud se dá do pohybu) se roztočí při jakékoliv zátěži. Střídavé motory toho nejsou schopny.
Doposud tento problém nebyl zcela vyřešen. K dnešnímu dni se ke spouštění takových motorů používá automatický startér, jehož princip činnosti je podobný automobilové převodovce:
- Nejprve proud postupně stoupá na počáteční hodnotu.
- Po „posunu“ z místa aktuální hodnota prudce klesá a opět plynule stoupá „přizpůsobením rotace hřídele“.
- Po zvýšení na mezní hodnotu se síla proudu opět sníží a „přizpůsobí“.
Tento cyklus se opakuje 3-5x (obr. 4) a řeší nutnost nastartování motoru bez výskytu kritických zátěží v síti. Ve skutečnosti stále nedochází k „měkkému“ rozběhu, ale zařízení funguje bezpečně a hlavní výhoda stejnosměrného motoru – točivý moment – je zachována.
Schémata zapojení
Připojení stejnosměrného motoru je poněkud obtížnější než u motorů se střídavou specifikací.
Motory vysokého a středního výkonu mají zpravidla speciální budicí vinutí (OB) a kontakty kotvy umístěné ve svorkovnici. Nejčastěji je výstupní napětí zdroje přiváděno na kotvu a proud, zpravidla upravený reostatem, je přiváděn do OB. Rychlost otáčení motoru přímo závisí na síle proudu přiváděného do budícího vinutí.
Existují tři hlavní schémata pro zapínání kotvy a budícího vinutí stejnosměrných motorů:
- Sériové buzení se používá u motorů, které vyžadují velký proud na startu (elektromobily, půjčovny vybavení atd.). Toto schéma zajišťuje sériové připojení OF a kotvy ke zdroji. Po přivedení napětí procházejí vinutím kotvy a OB proudy stejné velikosti.Je třeba mít na paměti, že snížení zatížení hřídele i o čtvrtinu se sekvenčním buzením povede k prudkému nárůstu otáček, což může vést k porucha motoru, proto se tento obvod používá za podmínek stálého zatížení.
- Paralelní buzení se používá u motorů, které zajišťují chod obráběcích strojů, ventilátorů a dalších zařízení, která nezatěžují hřídel v době rozběhu vysokou zátěží. V tomto obvodu je k buzení OF použito nezávislé vinutí, které je nejčastěji regulováno reostatem.
- Nezávislé buzení je velmi podobné paralelnímu buzení, ale v tomto případě je pro napájení OB použit nezávislý zdroj, což eliminuje zdání elektrického spojení mezi kotvou a budicím vinutím.
V moderních stejnosměrných elektromotorech lze na základě tří popsaných použít smíšené obvody.
Nastavení rychlosti otáčení
Způsob regulace rychlosti DPT závisí na schématu jeho připojení:
- U motorů s paralelním buzením lze snížení rychlosti vůči jmenovité hodnotě provést změnou napětí kotvy a zvýšení zeslabením toku buzení. Pro zvýšení rychlosti (ne více než 4krát vzhledem ke jmenovité hodnotě) je do obvodu OB přidán reostat.
- Při sériovém buzení se nastavení snadno provádí proměnným odporem v obvodu kotvy. Je pravda, že tato metoda je vhodná pouze pro snížení rychlosti a pouze v poměrech 1: 3 nebo 1: 2 (navíc to vede k velkým ztrátám v reostatu). Zvýšení se provádí pomocí seřizovacího reostatu v obvodu OB.
Tyto obvody se zřídka používají v moderních high-tech zařízeních, protože mají úzký rozsah nastavení a další nevýhody. V dnešní době se pro tyto účely stále častěji vytvářejí elektronické řídicí obvody.
Zpětný chod
Abyste mohli obrátit (obrátit) rotaci stejnosměrného motoru, musíte:
- se sériovým buzením - stačí změnit polaritu vstupních kontaktů;
- se smíšeným a paralelním buzením - je nutné změnit směr proudu ve vinutí kotvy; prasknutí OF může vést ke kritickému zvýšení vstřikované elektromotorické síly a porušení izolace vodiče.
Rozsah použití
Jak jste již pochopili, použití stejnosměrných motorů je vhodné v podmínkách, kdy není možné trvalé nepřerušované připojení k síti. Dobrým příkladem je zde startér do auta, který tlačí spalovací motor „z místa“, nebo dětské hračky s motorem. V těchto případech se ke spuštění motoru používají baterie. Pro průmyslové účely se DPT používají ve válcovnách.
Hlavní oblastí použití DPT je elektrická doprava. Parníky, elektrické lokomotivy, tramvaje, trolejbusy a další podobné mají velmi velký rozběhový odpor, který lze překonat pouze pomocí stejnosměrných motorů s jejich měkkou charakteristikou a širokými limity regulace otáček. Vzhledem k rychlému rozvoji a popularizaci ekologických dopravních technologií se rozsah DPT pouze zvyšuje.

Nejjednodušší sestava kartáčů a sběračů
Výhody a nevýhody
Shrnutím všeho výše uvedeného je možné popsat výhody a nevýhody charakteristické pro stejnosměrné motory ve srovnání s jejich protějšky navrženými pro provoz na střídavý proud.
Hlavní výhody:
- DCT jsou nepostradatelné v situacích, kdy je potřeba silný rozběhový moment;
- rychlost otáčení kotvy je snadno nastavitelná;
- Stejnosměrný motor je univerzální elektrický stroj, to znamená, že jej lze použít jako generátor.
Hlavní nevýhody:
- DPT mají vysoké výrobní náklady;
- použití sestavy kartáč-kolektor vede k potřebě časté údržby a oprav;
- K provozu vyžaduje stejnosměrný napájecí zdroj nebo usměrňovače.
Stejnosměrné elektromotory samozřejmě ztrácejí na své "variabilní" protějšky z hlediska nákladů a spolehlivosti, nicméně se používají a budou používat, protože výhody jejich použití v určitých oblastech kategoricky překračují všechny nevýhody.