Věčný elektromagnetický motor-generátor
Tento článek je věnován vývoji a popisu principu činnosti, konstrukcí a elektrického obvodu jednoduchého originálního "věčného" elektromagnetického motorgenerátoru nového typu s elektromagnetem na statoru a pouze jedním permanentním magnetem (PM) na rotor, s rotací tohoto PM v pracovní mezeře tohoto elektromagnetu.
PERPETUÁLNÍ ELEKTROMAGNETICKÝ MOTOR-GENERÁTOR S ELEKTROMAGNETEM NA STATORU A MAGNETEM NA ROTORU
1. Úvod
2. Kolik energie se skrývá v permanentním magnetu a odkud pochází?
3. Stručný přehled elektromagnetických motorů a generátorů s PM
4. Popis konstrukce a elektroinstalace modernizovaného elektromagnetického motorgenerátoru se střídavým elektromagnetem
5. Reverzibilní elektromagnetický motor s externím PM na rotoru
6. Popis práce "věčného" elektromagnetického motorgenerátoru
7. Nezbytné uzly a řídicí algoritmy pro provoz tohoto elektromagnetického motorgenerátoru v režimu "perpetum mobile"
8. Algoritmus zpětného elektrického proudu ve vinutí elektromagnetu v závislosti na poloze magnetu
9. Výběr a výpočet prvků a zařízení pro EMDG
10. Nízkonákladový elektromagnet EMD (základy návrhu a výpočtu)
11. Správná volba permanentních magnetů EMD rotoru
12. Volba elektrického generátoru pro prototypování EMDG
13. Elektromagnetický motor-generátor permanentní závěrky
14. Perpetuální elektromagnetický motor na klasickém indukčním elektroměru
15. Porovnání energetické náročnosti nového EMDH s analogy
16. Závěr
ÚVOD
Problém vytváření perpetum mobile po mnoho staletí vzrušuje mysl mnoha vynálezců a vědců po celém světě a je stále aktuální.
Zájem o toto téma „perpetual mobile machines“ ze strany světového společenství je stále obrovský a stále roste s tím, jak rostou energetické potřeby civilizace a v souvislosti s blížícím se vyčerpáním organických neobnovitelných paliv a zejména v souvislosti s nástupem tzv. globální energetická a environmentální krize civilizace. Při budování společnosti budoucnosti je samozřejmě důležité vyvíjet nové zdroje energie, které mohou uspokojit naše potřeby. A dnes je to pro Rusko a mnoho dalších zemí prostě životně důležité. V budoucím oživení země a nadcházející energetické krizi budou zcela nezbytné nové zdroje energie založené na průlomových technologiích.
Oči mnoha talentovaných vynálezců, inženýrů a vědců jsou již dlouho upoutány k permanentním magnetům (PM) a jejich tajemné a úžasné energii. Navíc tento zájem o PM v posledních letech dokonce vzrostl, a to díky významnému pokroku ve vytváření silných PM a částečně kvůli jednoduchosti navrhovaných konstrukcí magnetických motorů (MF).
Kolik energie se skrývá v permanentním magnetu a odkud pochází?
Je zřejmé, že moderní kompaktní a výkonné PM obsahují významnou latentní energii magnetického pole. A cílem vynálezců a vývojářů takových magnetických motorů a generátorů je izolovat a přeměnit tuto latentní energii PM na jiné typy energie, například na mechanickou energii nepřetržitého otáčení magnetického rotoru nebo na elektřinu. Uhlí při spalování uvolňuje 33 J na gram, ropa, která u nás za 10-15 let začne končit, uvolňuje 44 J na gram, gram uranu dává 43 miliard J energie. Permanentní magnet teoreticky obsahuje 17 miliard joulů energie. za jeden gram. Samozřejmě jako u klasických zdrojů energie nebude účinnost magnetu stoprocentní, navíc feritový magnet má životnost cca 70 let za předpokladu, že nebude vystaven silnému fyzikálnímu, teplotnímu a magnetickému zatížení, nicméně , s takovým množstvím energie obsažené v něm energie to není tak důležité. Kromě toho již existují sériové průmyslové magnety ze vzácných kovů, které jsou desetkrát pevnější než feritové, a proto jsou účinnější. Magnet, který ztratil svou sílu, lze jednoduše „dobít“ silným magnetickým polem. Otázka „odkud se v PM bere tolik energie“ však zůstává ve vědě otevřená. Mnoho vědců se domnívá, že energie v PM nepřetržitě přichází zvenčí z éteru (fyzické vakuum). A jiní vědci tvrdí, že to prostě vzniká samo o sobě kvůli magnetizovanému materiálu PM. Zatím není jasno.
STRUČNÝ PŘEHLED ZNÁMÝCH ELEKTROMAGNETICKÝCH MOTORŮ A GENERÁTORŮ
Ve světě již existuje mnoho patentů a inženýrských řešení pro různé konstrukce magnetických motorů - ale v demonstraci zatím prakticky žádné takové provozní MD v režimu "perpetum mobile" nejsou. A „věčné“ průmyslové magnetické motory (IM) dosud nebyly vytvořeny a zvládnuty v sérii a nejsou uváděny do reality, a co víc, ještě nejsou ve volném prodeji. Bohužel na internetu známé informace o sériových magnetických motor-generátorech od Perendev (Německo) a Akoil-energy se zatím ve skutečnosti nepotvrdily. Existuje mnoho možných důvodů pomalého skutečného pokroku v oblasti kovů v MD, ale zjevně existují dva hlavní důvody: buď kvůli klasifikaci těchto vývojů, nejsou zavedeny do sériové výroby, nebo kvůli nízké energetické náročnosti pilotních průmyslových vzorků. MD. Je třeba poznamenat, že některé problémy vytváření čistě magnetických motorů s mechanickými kompenzátory a magnetickými clonami, například záclonový typ MD, dosud nebyly vědou a technikou plně vyřešeny.
Klasifikace a stručná analýza některých známých MD
- Magneto-mechanické magnetické motory Dudyshev/1-3/. Díky své konstruktivní rafinovanosti mohou dobře fungovat v režimu „perpetual mobile“.
- Motor MD Kalinina- nefunkční pístový MD s otočnou magnetickou clonou - MD z důvodu nedovedení pružinového kompenzátoru do správného konstrukčního řešení.
- Elektromagnetický motor "Perendev"- klasický elektromagnetický motor s PM na rotoru a kompenzátorem, nefunkční bez komutačního procesu v oblastech, kudy procházejí mrtvá místa držení rotoru s PM. Jsou v něm možné dva typy spínání (umožňující průchod "zádržného bodu" PM rotoru - mechanické a elektromagnetické. První automaticky redukuje problém na smyčkovou verzi SMOT'a (a omezuje rychlost otáčení, popř. tedy výkon), druhý je nižší.V "věčném motoru" nemůže fungovat.
- Elektromagnetický motor Minato- klasický příklad elektromagnetického motoru s PM rotorem a elektromagnetickým kompenzátorem, který zajišťuje průchod magnetického rotoru „zádržného bodu“ (podle Minata „bod kolapsu“). V principu se jedná pouze o fungující elektromagnetický motor se zvýšenou účinností. Maximální dosažitelná účinnost je přibližně 100% nefunkční v režimu „perpetual“ MD.
- Johnsonův motor- analog elektromagnetického motoru Perendev s kompenzátorem, ale s ještě nižší energií.
- Magnetický motor-generátor Shkondin- elektromagnetický motor s PM, pracující na silách magnetického odpuzování PM (bez kompenzátoru). Je konstrukčně složitý, má sestavu kolektor-kartáč, jeho účinnost je asi 70-80 %. Nefunkční v režimu věčného MD.
- Elektromagnetický motor-generátor Adams- toto je ve skutečnosti nejpokročilejší ze všech známých - elektromagnetický motor-generátor, který funguje jako motorové kolo Shkondina, pouze na síly magnetického odpuzování PM z konců elektromagnetů. Ale tento motor-generátor na bázi PM je konstrukčně mnohem jednodušší než Shkondinův magnetický motor-generátor. V zásadě se jeho účinnost může přiblížit pouze 100 %, ale pouze v případě, že vinutí elektromagnetu je spínáno krátkým impulsem vysoké intenzity z nabitého kondenzátoru. Nefunkční ve „věčném“ režimu MD.
- Dudyševův elektromagnetický motor. Reverzibilní elektromagnetický motor s vnějším magnetickým rotorem a elektromagnetem centrálního statoru). Jeho účinnost není větší než 100% z důvodu otevřenosti magnetického obvodu /3/. Tento EMD byl testován v provozu (foto rozložení je k dispozici).
Jsou známy i jiné EMD, ale mají přibližně stejné principy fungování. Ale přesto vývoj teorie a praxe magnetických motorů ve světě stále postupně pokračuje. A zvláště hmatatelný skutečný pokrok v MD byl nastíněn právě u levných kombinovaných magneto-elektromagnetických motorů s použitím vysoce účinných permanentních magnetů v nich. Tyto nejbližší analogy takového významu pro světovou komunitu - prototypy věčných magnetických motorů se nazývají - elektromagnetické motorgenerátory (EMDG) s elektromagnety a permanentními magnety na statoru nebo rotoru. Navíc už reálně existují, neustále se vylepšují a dokonce se některé z nich již vyrábí sériově. Na internetu se objevilo poměrně hodně zpráv a článků o jejich návrzích s fotkami a jejich experimentálními studiemi. Známé jsou například účinné, již v kovu testované, relativně levné elektromagnetické motorgenerátory Adams /1/. Navíc některé z nejjednodušších návrhů kombinovaných EMDG již dosáhly sériové výroby a hromadné implementace. Jsou to například sériová elektromagnetická motorová kola Shkondin používaná na elektrokolech.
Konstrukce a energetika všech známých EMDG jsou však stále značně neefektivní, což jim neumožňuje provoz v režimu „perpetum mobile“, tzn. bez externího zdroje energie.
Nicméně existují způsoby pro konstruktivní a radikální energetické zlepšení známých EMDGs. A právě takové energeticky vyspělejší možnosti si s tímto nelehkým úkolem – zcela autonomním provozem v režimu „věčného“ elektromagnetického motorgenerátoru – bez jakékoli spotřeby elektřiny z externího zdroje poradí, a jsou v tomto článku zvažovány.
Tento článek je věnován vývoji a popisu principu činnosti původní konstrukce jednoduchého elektromagnetického motorgenerátoru nového typu s obloukovým elektromagnetem na statoru a pouze s jedním permanentním magnetem (PM) na rotoru, s polární rotace tohoto PM v mezeře elektromagnetu, která je zcela ovladatelná v režimu "perpetum motion generator".
Dříve a částečně byla tato konstrukce tak neobvyklého polárního elektromagnetu v jiné reverzibilní verzi již testována na stávajících maketách autora článku a prokázala provozuschopnost a poměrně vysokou energetickou náročnost.
Popis konstrukce a elektrického obvodu modernizovaného EMDG
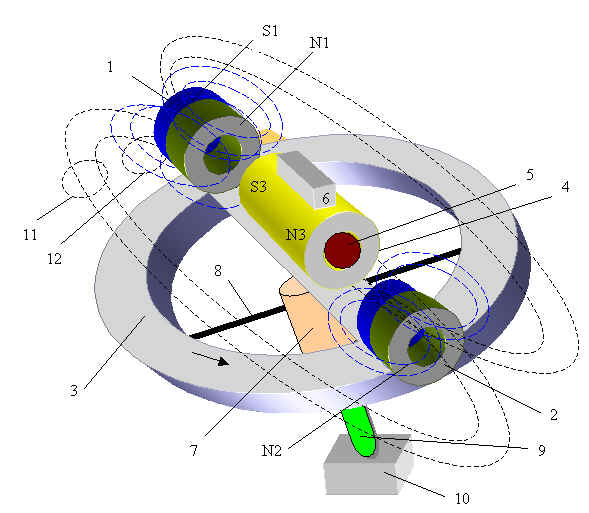
Obr.1 Elektromagnetický motor-generátor s PM na rotoru, externím střídavým elektromagnetem na statoru a elektrickým generátorem na magnetické hřídeli rotoru Obr.
Zjednodušené provedení elektromagnetického motorgenerátoru (EMG) tohoto typu a jeho elektrická část jsou na obr. 1. Skládá se ze tří hlavních jednotek - přímo z DM s elektromagnetem na statoru a PM na rotoru a elektromechanickým generátorem na stejné hřídeli s DM. MD zařízení se skládá ze statorového statického elektromagnetu 1 vyrobeného na prstencovém segmentu s výřezem nebo na obloukovém magnetickém obvodu 2 s indukční cívkou 3 tohoto elektromagnetu a elektronickým spínačem pro reverzaci proudu v cívce 3 k němu připevněným a permanentní magnet (PM) 4 pevně uložený na rotoru 5 v pracovní mezeře tohoto elektromagnetu 1. Rotační hřídel rotoru 5 EMD je spojen spojkou s hřídelí 7 elektrogenerátoru 8. Zařízení je vybaveno s nejjednodušším regulátorem - elektronickým spínačem 6, (autonomní invertor), vyrobeným podle schématu jednoduchého můstkového polořízeného autonomního invertoru, elektricky připojeného na výstup k indukčnímu vinutí 3 elektromagnety 2 a přes vstup napájení - do autonomním zdrojem elektrické energie 10. Navíc je reverzibilní indukční vinutí 3 elektromagnetu 1 obsaženo v úhlopříčce střídavého proudu tohoto spínače 6 a přes stejnosměrný obvod je tento spínač 6 připojen k vyrovnávacímu stejnosměrnému zdroji 10, např. elektrický výstup generátoru 8 elektrického stroje je připojen buď přímo k vinutí indukční cívky 3, nebo přes mezilehlý elektronický usměrňovač (neznázorněn) k vyrovnávacímu stejnosměrnému zdroji (typ AB) 7.
Mostový nejjednodušší elektronický spínač (autonomní invertor) je vyroben na 4 polovodičových ventilech, obsahuje dva výkonové tranzistory 9 a v ramenech můstku dva neovladatelné bezdotykové klíče jednosměrného vedení (dioda) 10. Dva snímače 11 polohy PM magnetu jsou rovněž umístěny na elektromagnetickém statoru 1 tohoto MD 5 rotoru 6, v blízkosti trajektorie jeho pohybu 15, a jako snímač polohy PM-magnetu 5 rotoru jednoduché kontaktní snímače magnetický. síla pole - používají se jazýčkové spínače. Tyto polohové snímače 11 magnetu 4 rotoru 5 jsou umístěny kvadraturně - jeden snímač je umístěn v blízkosti konce elektromagnetu s póly a druhý je posunut o 90 stupňů (jazýčkové spínače), poblíž dráhy otáčení PM5. rotoru 6. Výstupy těchto snímačů polohy 11 PM 5 rotoru jsou jazýčkové spínače, relé jsou připojena přes zesilovací logické zařízení 12 k řídicím vstupům tranzistorů 9. Užitečná elektrická zátěž 13 je připojena k výstupnímu vinutí elektrický generátor 8 prostřednictvím spínače (není znázorněn), přepnutí ze stejnosměrné spouštěcí jednotky na plné napájení z elektrického generátoru 8 (není znázorněn).
Zaznamenáváme hlavní konstrukční vlastnosti takového MD ve srovnání s analogy:
1. Používá se víceotáčkový ekonomický nízkoampérový obloukový elektromagnet.
2. Permanentní magnet 4 rotoru 5 se otáčí v mezeře obloukového elektromagnetu 1 právě magnetickými silami přitahování a odpuzování PM 5. V důsledku změny magnetické polarity magnetických pólů v mezeře tento elektromagnet, když směr proudu v cívce 3 elektromagnetu 1 povel snímačům polohy 11 PM magnetu 4 rotoru 5. Dále upozorňujeme, že je vhodné vyrobit rotor 5 masivní z nemagnetického materiálu, aby se užitečná funkce setrvačníku.
Reverzibilní elektromagnetický motor s externím PM na rotoru
V zásadě je možná i reverzibilní verze provedení EMD, u které je rotor s permanentním magnetem PM na ráfku umístěn mimo elektromagnet. Dříve byla takováto varianta reverzibilního EMD vyvinuta autorem článku, vytvořena a úspěšně testována v práci a již v roce 1986. Níže na obr. 2,3 je také zjednodušený návrh takového dříve testovaného EMDG, popsané dříve v článcích autora /2-3/
Provedení (neúplné) rozložení nejjednoduššího EMD s vnějším permanentním magnetem na rotoru a s odstraněným elektromagnetem EMD statoru je na fotografii (obr. 3). Ve skutečnosti je elektromagnet pravidelně umístěn ve středu válcového dielektrického nemagnetického průhledného válce s horním krytem, na kterém je namontován rotační hřídel tohoto EMD. Vypínač a další elektrika na fotce nejsou.
Obr.2 Reverzibilní EMDG s externím MP-magnetickým rotorem (nekompletní provedení)
Označení:
1. permanentní magnet (PM1)
2. permanentní magnet (PM2)
3. Prstencový rotor EMD (PM1,2 pevně umístěn na rotoru)
4. vinutí pevného statorového elektromagnetu (nezávislé zavěšení)
5. magnetický obvod elektromagnetu
6. Snímače polohy rotoru PM
7. hřídel rotoru (nemagnetické ložisko)
8. mechanické spojovací paprsky prstencového rotoru a jeho hřídele
9. nosný hřídel
10. podpora
11. silové magnetické čáry elektromagnetu
12. magnetické čáry permanentního magnetu Šipka ukazuje směr otáčení rotoru 3

Obr.3 Fotografie nejjednoduššího rozložení EMDG (s odstraněným elektromagnetem)
Popis práce "věčného" elektromagnetického motorgenerátoru (obr. 1)
Zařízení - tento věčný elektromagnetický motor - generátor (obr. 1) funguje následovně.
Rozběh a zrychlení magnetického rotoru EMDG na ustálenou rychlost
EMDG se spouští přivedením elektrického proudu na cívku 3 elektromagnetu 2 z napájecí jednotky 10. Počáteční poloha magnetických pólů permanentního magnetu 4 rotoru je kolmá k mezeře elektromagnetu 2. Polarita magnetických pólů elektromagnetu nastává v tomto případě tak, že permanentní magnet 4 rotoru 5 se začne otáčet kolem své osy 16 otáčení magnetickými silami, které jsou svými magnetickými póly přitahovány k opačnému magnetickému pólu elektromagnetu 2. V tomto okamžiku shody protilehlých magnetických pólů magnetu 4 a konců v mezeře elektromagnetu 2 se povelem magnetického jazýčkového relé vypne proud v cívce 3 (nebo sinusoida tohoto proudu prochází nulou) a setrvačností projde masivní rotor tento mrtvý bod své trajektorie spolu s PM 4. Poté se změní směr proudu v cívce 3 a magnetické póly elektromagnetu 2 v této pracovní mezeře se stanou stejnými jako magnetické póly. póly permanentního magnetu 4. V důsledku toho síly magnetického odpuzování mj. stejných magnetických pólů - permanentní magnet 4 rotoru a samotný rotor přijímají přídavný urychlovací moment působící ve směru otáčení rotoru ve stejném směru. Po dosažení polohy magnetických pólů rotoru PM - při jeho otáčení - podél magnetického poledníku se v cívce 3 opět změní směr proudu na příkaz druhého magnetického snímače polohy 11, přepólování magnetických pólů elektromagnetu 2 se opět objeví v pracovní mezeře a permanentní magnet 4 se opět začne přitahovat k nejbližším protilehlým magnetickým pólům elektromagnetu 2 ve směru otáčení v jeho mezeře. A pak se opakovaně cyklicky opakuje proces zrychlování PM 4 a rotoru - cyklickým reverzováním elektrického proudu v cívce 3 cyklováním tranzistorů 8 spínače 7 z polohových snímačů 11 PM rotoru. A současně, jak se PM 4 a rotor 5 zrychlují, frekvence obratů elektrického proudu v cívce 3 se automaticky zvyšuje v důsledku přítomnosti v tomto elektromechanickém systému pozitivní zpětné vazby podél obvodu přes komutátor a snímače polohy PM 4 rotoru.
Všimněte si, že směr elektrického proudu v cívce 3 (znázorněno šipkami na obr. 1) se mění v závislosti na tom, který z tranzistorů 8 spínače 7 je otevřen. Změnou spínací frekvence tranzistorů měníme frekvenci střídavého proudu v cívce 3 elektromagnetu a podle toho měníme rychlost otáčení PM 4 rotoru 5.
ZÁVĚR: Permanentní magnet rotoru po celou otáčku kolem své osy tedy téměř nepřetržitě zažívá jednosměrný zrychlovací moment ze silové magnetické interakce s magnetickými póly elektromagnetu, který jej uvádí do rotace a postupně urychluje i elektrický generátor. na společném rotačním hřídeli na danou ustálenou rychlost otáčení.
Přímý způsob elektrického ovládání vinutí statorového elektromagnetu EMDG v závislosti na poloze rotoru PM
Další inovací k zajištění takového způsobu ovládání vinutí elektromagnetu 3 MD střídavým proudem o požadované frekvenci a fázi přímo z výstupu generátoru střídavého proudu v ustáleném provozu je zavedení do takového systému magnetického motoru. - elektrický generátor - paralelní rezonanční L-C obvod - v obvodu jsou dvě indukčnosti - od cívky 3 a statorového vinutí generátoru a dodatečné elektrické kapacitní zavedení přídavného elektrického kondenzátoru 17 do výstupního elektrického obvodu generátoru 8 pro zajištění jeho samobuzení a následné elektrické L-C rezonance, pro snížení elektrických ztrát a pro extrémně jednoduché ovládání indukčnosti 3 střídavým proudem s požadovanou fází napětí a proudu přímo z generátoru 8.
Plně autonomní režim ("perpetuum mobile") EMDG
Je zcela zřejmé, že pro zajištění provozu tohoto zařízení v režimu „perpetum mobile“ je nutné získat volnou energii z permanentních magnetů rotoru, postačující pro generování elektrického generátoru na EMD hřídeli potřebného pro tento zcela autonomní provoz systému - elektřiny. Nejdůležitější podmínkou je proto zajistit, aby magnetický rotor tohoto MD měl dostatečný krouticí moment pro generování dostatečného množství elektřiny na svém hřídeli, které by bylo více než dostatečné pro napájení cívky elektromagnetu, užitečné zatížení dané hodnoty a kompenzaci pro různé nevyhnutelné ztráty v takových elektromechanických systémech s PM na rotoru. Po odvinutí PM 4 a dosažení 5 jmenovitých otáček rotoru přepneme napájení cívky 3 přímo z elektrocentrály nebo přes přídavný měnič napětí a zdroj startéru se buď úplně vypne, nebo přepne do režimu dobíjení. z elektrického generátoru na hřídeli tohoto EMD.
NEZBYTNÁ STRUKTURA MONTÁŽ A ALGORITHY ŘÍZENÍ PRO PROVOZ TOHOTO MOTORGENERÁTORU V REŽIMU „PPERP MOBILE“
Tato důležitá podmínka pro provoz DM v režimu „perpetum mobile“ může být splněna pouze tehdy, je-li současně splněno alespoň šest podmínek:
1. použití moderních silných niobových permanentních magnetů v MD, které poskytují maximální točivý moment takového rotoru s minimálními rozměry PM.
2. použití efektivního ultralevného obvodu elektromagnetu MD na statoru MD díky extrémně vysokému počtu závitů vinutí elektromagnetu a správnému a efektivnímu návrhu jeho magnetického obvodu a vinutí.
3. potřeba startovacího zařízení a startovacího zdroje elektrické energie pro start a akceleraci MD s napájením cívky elektromagnetu ze spínače.
4. správný algoritmus pro řízení elektrického proudu ve vinutí elektromagnetu ve směru, velikosti v závislosti na poloze rotoru PM.
5. koordinace elektrických parametrů elektrického generátoru a vinutí elektromagnetu.
6. správný algoritmus pro spínání napájecích obvodů vinutí elektromagnetu, když je obvod elektrického generátoru zapnutý v napájecím obvodu vinutí elektromagnetu a spouštěcí zdroj elektřiny, například AB, je převeden z vybíjecího režimu do režimu jeho elektrického dobíjení.
ALGORITMUS PŘEPÍNÁNÍ ELEKTRICKÉHO PROUDU V CÍVCE ELEKTROMAGNETU V ZÁVISLOSTI NA POLOZE ROTORU EMD PM (obr. 1)
Uvažujme algoritmus pro spínání elektrického proudu v cívce za přítomnosti jednoho tyčového magnetu na EMD rotoru na jednu otáčku rotoru (obr. 3), abychom zajistili efektivní provoz tohoto EMD (provedení obr. 1) , pomocí kombinovaných diagramů polohy rotoru a směru toku proudu ve vinutí 3 statorového elektromagnetu 1. Jak vyplývá z těchto diagramů, podstatou správného algoritmu pro řízení elektromagnetu 1 EMD je, že jedna úplná otáčka rotoru PM elektrický proud v indukčním vinutí 3 elektromagnetu dělá dvě úplné oscilace.. To znamená, jinými slovy, frekvence elektrického Proud přiváděný do vinutí 3 elektromagnetu 1 pomocí elektronického spínače, který je k němu připojen, řízený podle povelů snímačů polohy PM rotoru je rovna dvojnásobku rychlosti rotoru a fáze tohoto elektrického proudu je přísně synchronizována s polohou PM rotoru. EMD. Vzhledem k tomu, že spínač přepíná směr proudu ve vinutí 3 (obrácený proud), nastává striktně na magnetickém rovníku PM, když se magnetické póly PM a magnetické póly konců magnetického obvodu shodují v pracovní mezeře PM. magnetický obvod 2 elektromagnetu 1 pak následkem toho za jednu úplnou otáčku PM rotoru neustále zažívá zrychlující se jednosměrný točivý moment a dvakrát přitahováním opačných magnetických pólů konců magnetického obvodu rotoru elektromagnet a PM rotoru, a dvakrát - kvůli magnetickým silám odpuzování jejich podobných magnetických pólů.
Obr.4 Časový diagram činnosti elektronického spínače pro reverzaci proudu ve vinutí elektromagnetu statoru pro jednu otáčku rotoru PM Obr.
Obr.5 Cyklogram střídání magnetických pólů v mezeře elektromagnetu pro jednu otáčku PM rotoru EMDG Obr.
K vysvětlení algoritmu elektromagnetu EMD:
3.4 - magnetické póly konců obloukového magnetického obvodu 2 elektromagnetu 1
Cívka s vinutím 3 je umístěna na magnetickém obvodu 2 elektromagnetu 1
9. magnet rotoru