Ewiger elektromagnetischer Motor-Generator
Dieser Artikel widmet sich der Entwicklung und Beschreibung des Funktionsprinzips, des Designs und der elektrischen Schaltung eines einfachen originalen "ewigen" elektromagnetischen Motorgenerators eines neuen Typs mit einem Elektromagneten am Stator und nur einem Permanentmagneten (PM) am Stator Rotor, mit der Drehung dieses PM im Arbeitsspalt dieses Elektromagneten.
PERPETUAL ELECTROMAGNETIC MOTOR-GENERATOR MIT ELEKTROMAGNET AUF STATOR UND MAGNET AUF ROTOR
1. Einleitung
2. Wie viel Energie steckt in einem Permanentmagneten und woher kommt sie?
3. Kurzer Überblick über elektromagnetische Motoren und Generatoren mit PM
4. Beschreibung des Designs und der Elektrik des modernisierten elektromagnetischen Motorgenerators mit einem Wechselstrom-Elektromagneten
5. Umkehrbarer elektromagnetischer Motor mit externem PM auf dem Rotor
6. Beschreibung der Arbeit des "ewigen" elektromagnetischen Motorgenerators
7. Notwendige Knoten und Steueralgorithmen für den Betrieb dieses elektromagnetischen Motorgenerators im "Perpetuum Mobile"-Modus
8. Algorithmus zur Umkehrung des elektrischen Stroms in der Elektromagnetwicklung in Abhängigkeit von der Position des Magneten
9. Auswahl und Berechnung von Elementen und Ausrüstung für EMDG
10. Low-Cost-Elektromagnet EMD (Konstruktions- und Berechnungsgrundlagen)
11. Die richtige Wahl der Permanentmagnete des EMD-Rotors
12. Die Wahl eines elektrischen Generators für das Prototyping von EMDG
13. Elektromagnetischer Motorgenerator mit ewigem Verschluss
14. Ewiger elektromagnetischer Motor an einem herkömmlichen Induktionsstromzähler
15. Vergleich der Energieleistung des neuen EMDH mit Analoga
16. Fazit
EINLEITUNG
Das Problem der Herstellung von Perpetuum mobile-Maschinen für viele Jahrhunderte erregt die Gedanken vieler Erfinder und Wissenschaftler auf der ganzen Welt und ist immer noch aktuell.
Das Interesse an diesem Thema „Perpetuum Mobile“ aus der Weltgemeinschaft ist nach wie vor riesig und wächst, da der Energiebedarf der Zivilisation wächst und im Zusammenhang mit der drohenden Erschöpfung organischer nicht erneuerbarer Brennstoffe und insbesondere im Zusammenhang mit dem Beginn der globale Energie- und Umweltkrise der Zivilisation. Beim Aufbau der Gesellschaft der Zukunft ist es natürlich wichtig, neue Energiequellen zu entwickeln, die unseren Bedarf decken können. Und heute ist es für Russland und viele andere Länder einfach lebenswichtig. Bei der zukünftigen Erholung des Landes und der kommenden Energiekrise werden neue Energiequellen auf der Grundlage bahnbrechender Technologien absolut notwendig sein.
Die Augen vieler talentierter Erfinder, Ingenieure und Wissenschaftler sind seit langem an Permanentmagneten (PM) und ihrer mysteriösen und erstaunlichen Energie geheftet. Darüber hinaus hat dieses Interesse an PMs in den letzten Jahren aufgrund erheblicher Fortschritte bei der Schaffung starker PMs und teilweise aufgrund der Einfachheit der vorgeschlagenen Konstruktionen von Magnetmotoren (MF) sogar noch zugenommen.
Wie viel Energie steckt in einem Permanentmagneten und woher kommt sie?
Es ist offensichtlich, dass moderne kompakte und leistungsstarke PMs eine erhebliche latente Energie des Magnetfelds enthalten. Und das Ziel der Erfinder und Entwickler solcher Magnetmotoren und -generatoren ist es, diese latente Energie des PM zu isolieren und in andere Energiearten umzuwandeln, beispielsweise in die mechanische Energie der kontinuierlichen Rotation des Magnetrotors oder in Elektrizität. Kohle setzt bei der Verbrennung 33 J pro Gramm frei, Öl, das in unserem Land in 10-15 Jahren zu Ende gehen wird, setzt 44 J pro Gramm frei, ein Gramm Uran gibt 43 Milliarden J Energie. Ein Permanentmagnet enthält theoretisch 17 Milliarden Joule Energie. für ein Gramm. Natürlich wird, wie bei herkömmlichen Energiequellen, der Wirkungsgrad des Magneten nicht hundertprozentig sein, außerdem hat ein Ferritmagnet eine Lebensdauer von etwa 70 Jahren, sofern er jedoch keinen starken physikalischen, Temperatur- und magnetischen Belastungen ausgesetzt ist Bei so viel Energie, die in ihm steckt, ist das nicht so wichtig. Außerdem gibt es bereits serienmäßig Industriemagnete aus seltenen Metallen, die zehnmal stärker als Ferritmagnete und damit leistungsfähiger sind. Ein Magnet, der seine Kraft verloren hat, kann einfach mit einem starken Magnetfeld „wieder aufgeladen“ werden. Allerdings bleibt die Frage „woher kommt so viel Energie im PM“ in der Wissenschaft offen. Viele Wissenschaftler glauben, dass die Energie im PM ständig von außen aus dem Äther (physikalisches Vakuum) kommt. Und andere Forscher argumentieren, dass es aufgrund des magnetisierten Materials des PM einfach von selbst entsteht. Bisher gibt es keine Klarheit.
KURZER ÜBERBLICK ÜBER BEKANNTE ELEKTROMAGNETISCHE MOTOREN UND GENERATOREN
Es gibt weltweit bereits viele Patente und technische Lösungen für verschiedene Bauarten von Magnetmotoren – aber es gibt praktisch noch keine solchen Betriebs-MDs im „Perpetuum Mobile“-Modus zu sehen. Und bisher wurden „ewige“ industrielle Magnetmotoren (IM) nicht in einer Serie erstellt und gemeistert und werden nicht in die Realität eingeführt, und noch mehr, sie sind noch nicht im freien Verkauf. Leider haben sich die bekannten Informationen im Internet über serielle magnetische Motorgeneratoren von Perendev (Deutschland) und Akoil-Energy noch nicht in der Realität bestätigt. Es gibt viele mögliche Gründe für den langsamen wirklichen Fortschritt bei Metall in MD, aber anscheinend gibt es zwei Hauptgründe: entweder aufgrund der Klassifizierung dieser Entwicklungen werden sie nicht zur Massenproduktion gebracht oder aufgrund der geringen Energieleistung von industriellen Pilotmustern von MD. Es sei darauf hingewiesen, dass einige Probleme bei der Herstellung rein magnetischer Motoren mit mechanischen Kompensatoren und magnetischen Bildschirmen, beispielsweise MD vom Vorhangtyp, von Wissenschaft und Technologie noch nicht vollständig gelöst wurden.
Klassifikation und kurze Analyse einiger bekannter MDs
- Magnetomechanische Magnetmotoren Dudyshev/1-3/. Mit ihrer konstruktiven Raffinesse könnten sie durchaus im „Perpetuum Mobile“-Modus arbeiten.
- Motor MD Kalinina- funktionsuntüchtiger Hub-MD mit rotierendem Magnetsieb - MD aufgrund des Federkompensators nicht in die richtige konstruktive Lösung gebracht.
- Elektromagnetischer Motor "Perendev"- ein klassischer elektromagnetischer Motor mit einem PM auf dem Rotor und einem Kompensator, der ohne den Kommutierungsprozess in den Bereichen, in denen die Totpunkte des Haltens des Rotors mit dem PM verlaufen, nicht funktionsfähig ist. Darin sind zwei Arten des Schaltens möglich (um den "Haltepunkt" des PM des Rotors zu passieren - mechanisch und elektromagnetisch. Die erste reduziert das Problem automatisch auf eine Schleifenversion von SMOT'a (und begrenzt die Drehzahl und daher die Leistung), der zweite ist niedriger.Im "ewigen Motor" kann nicht gearbeitet werden.
- Elektromagnetischer Minato-Motor- ein klassisches Beispiel eines elektromagnetischen Motors mit einem PM-Rotor und einem elektromagnetischen Kompensator, der den Durchgang des magnetischen Rotors des „Haltepunkts“ (nach Minato der „Kollapspunkt“) sicherstellt. Im Prinzip ist dies nur ein funktionierender elektromagnetischer Motor mit erhöhtem Wirkungsgrad. Der maximal erreichbare Wirkungsgrad ist im „perpetual“ MD-Modus zu ca. 100 % funktionsunfähig.
- Johnson-Motor- ein Analogon des elektromagnetischen Motors von Perendev mit einem Kompensator, jedoch mit noch geringerer Energie.
- Magnetischer Motorgenerator von Shkondin- ein elektromagnetischer Motor mit PM, der mit den Kräften der magnetischen Abstoßung des PM arbeitet (ohne Kompensator). Es ist konstruktiv aufwendig, hat eine Kollektor-Bürsten-Anordnung, sein Wirkungsgrad ist etwa 70-80%. Im ewigen MD-Modus nicht funktionsfähig.
- Adams Elektromagnetischer Motorgenerator- dies ist in der Tat das fortschrittlichste von allen bekannten - ein elektromagnetischer Motor-Generator, der wie das Motorrad von Shkondin funktioniert, nur durch die Kräfte der magnetischen Abstoßung des PM von den Enden der Elektromagnete. Aber dieser PM-basierte Motor-Generator ist strukturell viel einfacher als Shkondins magnetischer Motor-Generator. Im Prinzip kann sein Wirkungsgrad nur 100 % erreichen, aber nur, wenn die Elektromagnetwicklung durch einen kurzen Impuls hoher Intensität von einem geladenen Kondensator geschaltet wird. Im "ewigen" MD-Modus nicht funktionsfähig.
- Elektromagnetischer Dudyshev-Motor. Umschaltbarer elektromagnetischer Motor mit externem Magnetrotor und zentralem Stator-Elektromagnet). Sein Wirkungsgrad beträgt aufgrund der Offenheit des Magnetkreises nicht mehr als 100 % /3/. Dieses EMD wurde im Betrieb getestet (das Foto des Layouts ist verfügbar).
Andere EMD sind ebenfalls bekannt, aber sie haben ungefähr die gleichen Funktionsprinzipien. Dennoch geht die Entwicklung der Theorie und Praxis von Magnetmotoren in der Welt immer noch allmählich weiter. Und besonders greifbarer echter Fortschritt in MD wurde genau in kostengünstigen kombinierten magneto-elektromagnetischen Motoren mit der Verwendung von hocheffizienten Permanentmagneten in ihnen skizziert. Diese engsten Analoga von solcher Bedeutung für die Weltgemeinschaft - die Prototypen von Perpetual Magnetic Motors werden genannt - elektromagnetische Motorgeneratoren (EMDG) mit Elektromagneten und Permanentmagneten am Stator oder Rotor. Außerdem gibt es sie bereits wirklich, sie werden ständig verbessert und einige von ihnen sind sogar bereits in Serie hergestellt. Im Internet erschienen viele Nachrichten und Artikel über ihre Entwürfe mit Fotos und ihre experimentellen Studien. Beispielsweise sind effektive, bereits in Metall getestete, relativ kostengünstige elektromagnetische Motorgeneratoren von Adams /1/ bekannt. Darüber hinaus haben einige der einfachsten Designs kombinierter EMDGs sogar bereits die Serienproduktion und Massenimplementierung erreicht. Dies sind zum Beispiel Shkondins serienmäßige elektromagnetische Motorräder, die bei Elektrofahrrädern verwendet werden.
Das Design und die Energietechnik aller bekannten EMDGs sind jedoch immer noch ziemlich ineffizient, was es ihnen nicht erlaubt, im "Perpetuum Mobile"-Modus zu arbeiten, d.h. ohne externe Stromquelle.
Dennoch gibt es Möglichkeiten für eine konstruktive und radikale energetische Verbesserung der bekannten EMDGs. Und genau solche energetisch fortschrittlicheren Optionen, die diese schwierige Aufgabe bewältigen können - vollständig autonomer Betrieb im Modus eines "ewigen" elektromagnetischen Motorgenerators - ohne jeglichen Stromverbrauch aus einer externen Quelle, werden in diesem Artikel betrachtet.
Dieser Artikel widmet sich der Entwicklung und Beschreibung des Funktionsprinzips des ursprünglichen Entwurfs eines einfachen elektromagnetischen Motorgenerators eines neuen Typs mit einem Lichtbogenelektromagneten am Stator und mit nur einem Permanentmagneten (PM) am Rotor Poldrehung dieses PM im Spalt des Elektromagneten, der im Modus „Perpetuum Mobile Generator“ durchaus betreibbar ist.
Zuvor und teilweise wurde dieses Design eines so ungewöhnlichen polaren EMD in einer anderen reversiblen Version bereits an den vorhandenen Modellen des Autors des Artikels getestet und hat die Funktionsfähigkeit und eine ziemlich hohe Energieleistung gezeigt.
Beschreibung des Designs und der elektrischen Schaltung des modernisierten EMDG
Abb.1 Elektromagnetischer Motor-Generator mit PM auf dem Rotor, einem externen Wechselstrom-Elektromagneten auf dem Stator und einem elektrischen Generator auf der magnetischen Rotorwelle
Ein vereinfachter Aufbau eines elektromagnetischen Motorgenerators (EMG) dieses Typs und seines elektrischen Teils sind in Abb. 1 dargestellt. 1. Es besteht aus drei Haupteinheiten - direkt vom DM mit einem Elektromagneten am Stator und PM am Rotor und einem elektromechanischen Generator auf derselben Welle wie der DM. Die MD-Vorrichtung besteht aus einem auf einem ringförmigen Segment mit einem Ausschnitt oder auf einem Lichtbogen ausgeführten Magnetkreis 2 mit einer induktiven Spule 3 dieses Elektromagneten und einem daran befestigten elektronischen Schalter zur Stromumkehr in der Spule 3 und einem statischen Elektromagneten 1 Permanentmagnet (PM) 4 starr auf dem Rotor 5 im Arbeitsspalt dieses Elektromagneten 1 platziert. Die Rotationswelle des Rotors 5 des EMD ist durch eine Kupplung mit der Welle 7 des elektrischen Generators 8 verbunden. Das Gerät ist ausgestattet mit dem einfachsten Regler - einem elektronischen Schalter 6 (autonomer Wechselrichter), der nach dem Schema eines einfachen halbgesteuerten autonomen Wechselrichters mit Brücke hergestellt ist, der elektrisch mit dem Ausgang der Elektromagneten 2 der induktiven Wicklung 3 und über den Stromversorgungseingang verbunden ist - zu eine autonome Stromquelle 10. Außerdem ist die reversierbare induktive Wicklung 3 des Elektromagneten 1 in die Wechselstromdiagonale dieses Schalters 6 eingeschlossen, und dieser Schalter 6 ist über den Gleichstromkreis mit einer gepufferten Gleichstromquelle 10, beispielsweise gem der elektrische Ausgang des Elektromaschinengenerators 8 ist entweder direkt mit den Wicklungen der Induktionsspule 3 oder über einen zwischengeschalteten elektronischen Gleichrichter (nicht gezeigt) mit einer Puffergleichstromquelle (AB-Typ) 7 verbunden.
Der einfachste elektronische Schalter der Brücke (autonomer Wechselrichter) besteht aus 4 Halbleiterventilen, enthält in den Armen der Brücke zwei Leistungstransistoren 9 und zwei nicht steuerbare berührungslose Tasten mit Einwegleitung (Diode) 10. Zwei Sensoren 11 der Position des PM-Magneten sind auch auf dem elektromagnetischen Stator 1 dieser MD 5 des Rotors 6 nahe der Trajektorie seiner Bewegung 15 angeordnet, und als Positionssensor des PM-Magneten 5 des Rotors sind einfache Kontaktsensoren des Magneten Feldstärke - es werden Reedschalter verwendet. Diese Positionssensoren 11 des Magneten 4 des Rotors 5 sind in Quadratur angeordnet – ein Sensor befindet sich in der Nähe des Endes des Solenoids mit Polen und der zweite ist um 90 Grad verschoben (Reed-Schalter), in der Nähe des Drehpfads des PM5 des Rotors 6. Die Ausgänge dieser Positionssensoren 11 PM 5 des Rotors sind Reed-Schalter, die Relais sind über eine verstärkende Logikvorrichtung 12 mit den Steuereingängen der Transistoren 9 verbunden. Eine nützliche elektrische Last 13 ist mit der Ausgangswicklung von verbunden den elektrischen Generator 8 über einen Schalter (nicht gezeigt) schalten Sie von der DC-Startereinheit auf volle Leistungsversorgung von dem elektrischen Generator 8 (nicht gezeigt).
Wir stellen die wichtigsten Konstruktionsmerkmale eines solchen MD im Vergleich zu Analoga fest:
1. Es wird ein kostengünstiger Lichtbogen-Elektromagnet mit mehreren Windungen und niedrigem Ampere verwendet.
2. Der Permanentmagnet 4 des Rotors 5 dreht sich im Spalt des Lichtbogenelektromagneten 1, und zwar genau durch die magnetischen Anziehungs- und Abstoßungskräfte des PM 5. Aufgrund der Änderung der magnetischen Polarität der Magnetpole im Spalt dieser Elektromagnet, wenn die Stromrichtung in der Spule 3 des Elektromagneten 1 Positionssensoren 11 PM des Magneten 4 des Rotors 5 befehlen. Wir weisen auch darauf hin, dass es ratsam ist, den Rotor 5 massiv aus nichtmagnetischem Material herzustellen, um dies durchzuführen nützliche Funktion eines Trägheitsschwungrads.
Umkehrbarer elektromagnetischer Motor mit externem PM am Rotor
Prinzipiell ist auch eine umkehrbare Version des EMD-Designs möglich, bei der der Rotor mit Permanentmagnet PM auf der Felge außerhalb des Elektromagneten platziert wird. Zuvor wurde eine solche Variante eines reversiblen EMD vom Autor des Artikels entwickelt, erstellt und erfolgreich in der Arbeit getestet, und zwar bereits 1986. Unten, in Abb. 2,3, gibt es auch ein vereinfachtes Design eines solchen zuvor getesteten EMDG, beschrieben früher in den Artikeln des Autors /2-3/
Das Design (unvollständig) des Layouts des einfachsten EMD mit einem externen Permanentmagneten am Rotor und mit entferntem EMD-Statorelektromagneten ist auf dem Foto dargestellt (Abb. 3). In Wirklichkeit ist der Elektromagnet regelmäßig in der Mitte eines zylindrischen, dielektrischen, nichtmagnetischen, transparenten Zylinders mit einer oberen Abdeckung angeordnet, an der die Drehwelle dieses EMD befestigt ist. Der Schalter und andere Elektrik sind auf dem Foto nicht dargestellt.
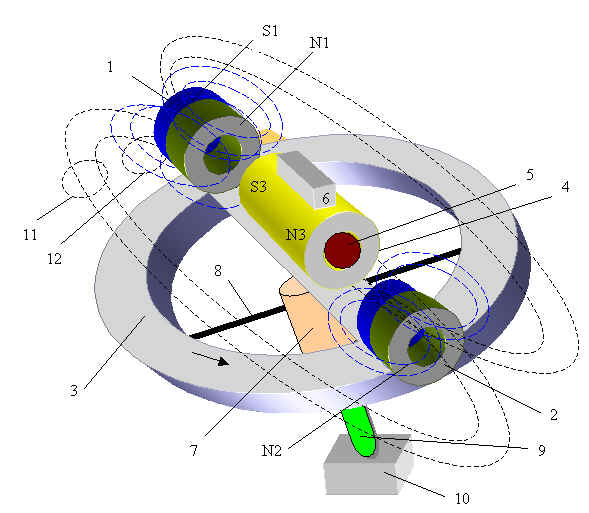
Abb.2 Reversibles EMDG mit externem MP-Magnetrotor (unvollständige Ausführung)
Bezeichnungen:
1. Dauermagnet (PM1)
2. Dauermagnet (PM2)
3. EMD-Ringrotor (PM1.2 starr auf dem Rotor platziert)
4. Wicklung eines Elektromagneten mit festem Stator (Einzelradaufhängung)
5. Solenoid Magnetkreis
6. PM-Rotorpositionssensoren
7. Rotorwelle (nichtmagnetisches Lager)
8. mechanische Verbindungsspeichen des ringförmigen Rotors und seiner Welle
9. Stützwelle
10. Unterstützung
11. Macht magnetische Linien eines Elektromagneten
12. Magnetlinien des Permanentmagneten Der Pfeil zeigt die Drehrichtung des Rotors 3

Abb.3 Foto des einfachsten EMDG-Layouts (mit entferntem Elektromagneten)
Beschreibung der Arbeit des "ewigen" elektromagnetischen Motorgenerators (Abb. 1)
Das Gerät - dieser ewige elektromagnetische Motor - Generator (Abb. 1) funktioniert wie folgt.
Starten und Beschleunigen des Magnetrotors EMDG auf eine konstante Drehzahl
Das EMDG wird durch Anlegen von elektrischem Strom an die Spule 3 des Elektromagneten 2 von der Stromversorgungseinheit 10 gestartet. Die Anfangsposition der Magnetpole des Permanentmagneten 4 des Rotors ist senkrecht zum Spalt des Elektromagneten 2. Die Polarität der Magnetpole des Elektromagneten erfolgt in diesem Fall derart, dass der Permanentmagnet 4 des Rotors 5 beginnt, sich um seine Rotationsachse 16 zu drehen, indem er durch magnetische Kräfte mit seinen Magnetpolen von dem gegenüberliegenden Magnetpol des Elektromagneten 2 angezogen wird. In diesem Moment des Zusammenfallens der entgegengesetzten Magnetpole des Magneten 4 und der Enden in der Lücke des Elektromagneten 2 wird der Strom in der Spule 3 durch den Befehl des magnetischen Reed-Relais abgeschaltet (oder die Sinuskurve dieses Stroms geht durch Null) und durch Trägheit passiert der massive Rotor diesen Totpunkt seiner Flugbahn zusammen mit PM 4. Danach wird die Richtung des Stroms in der Spule 3 geändert und die Magnetpole des Elektromagneten 2 in diesem Arbeitsspalt werden die gleichen wie die Magnetpole Pole des Permanentmagneten 4. Dadurch werden die Kräfte der magnetischen Abstoßung Iya gleichnamige Magnetpole - ein Permanentmagnet 4 Rotoren und der Rotor selbst erhalten ein zusätzliches Beschleunigungsmoment, das in Drehrichtung des Rotors in die gleiche Richtung wirkt. Nach Erreichen der Position der Magnetpole des PM-Rotors – während er rotiert – entlang des Magnetmeridians, ändert sich in der Spule 3 erneut die Richtung des Stroms auf Befehl des zweiten Magnetpositionssensors 11, die Umkehrung der Magnetpole des Elektromagneten 2 tritt wieder in den Arbeitsspalt ein und der Permanentmagnet 4 beginnt wieder, von den nächsten entgegengesetzten Magnetpolen des Elektromagneten 2 in Drehrichtung in seinem Spalt angezogen zu werden. Und dann wird der Prozess der Beschleunigung des PM 4 und des Rotors – durch zyklisches Umkehren des elektrischen Stroms in der Spule 3 durch zyklisches Schalten der Transistoren 8 des Schalters 7 von den Positionssensoren 11 des PM des Rotors wiederholt zyklisch wiederholt. Und zur gleichen Zeit, wenn das PM 4 und der Rotor 5 beschleunigen, erhöht sich automatisch die Frequenz der Umkehrungen des elektrischen Stroms in der Spule 3 aufgrund des Vorhandenseins in diesem elektromechanischen System einer positiven Rückkopplung entlang der Schaltung durch den Kommutator und die Positionssensoren von die PM 4 des Rotors.
Beachten Sie, dass sich die Richtung des elektrischen Stroms in der Spule 3 (durch Pfeile in Fig. 1 gezeigt) in Abhängigkeit davon ändert, welcher der Transistoren 8 des Schalters 7 offen ist. Durch Ändern der Schaltfrequenz der Transistoren ändern wir die Frequenz des Wechselstroms in der Spule 3 des Elektromagneten und ändern dementsprechend die Drehzahl des PM 4 des Rotors 5.
SCHLUSSFOLGERUNG: Somit erfährt der Permanentmagnet des Rotors für eine vollständige Umdrehung um seine Achse fast ständig ein unidirektionales Beschleunigungsmoment aus der Kraft der magnetischen Wechselwirkung mit den Magnetpolen des Elektromagneten, das ihn in Rotation versetzt und ihn und den elektrischen Generator allmählich beschleunigt auf einer gemeinsamen Rotationswelle zu einer gegebenen konstanten Rotationsgeschwindigkeit.
Direktes Verfahren zur elektrischen Steuerung der Wicklung des Statorelektromagneten EMDG in Abhängigkeit von der Position des Rotors PM
Eine zusätzliche Neuerung, um ein solches Verfahren zum Steuern der Wicklung eines Elektromagneten 3 MD mit Wechselstrom der erforderlichen Frequenz und Phase direkt vom Ausgang eines Wechselstromgenerators im stationären Betrieb bereitzustellen, ist die Einführung eines Magnetmotors in ein solches System - ein elektrischer Generator - ein paralleler L-C-Resonanzkreis - in der Schaltung gibt es zwei Induktivitäten - von der Spule 3 und der Statorwicklung des Generators und zusätzliche elektrische Kapazität, um die Einführung eines zusätzlichen elektrischen Kondensators 17 in den Ausgangsstromkreis des Generators 8 sicherzustellen seiner Selbsterregung und anschließender elektrischer LC-Resonanz, zur Reduzierung elektrischer Verluste und zur äußerst einfachen Ansteuerung der Induktivität 3 durch Wechselstrom mit gewünschter Spannung und Stromphase direkt vom Generator 8.
Vollständig autonomer Modus ("perpetuum mobile") EMDG
Es ist ganz offensichtlich, dass es, um den Betrieb dieser Vorrichtung im „Perpetuum Mobile“-Modus sicherzustellen, notwendig ist, freie Energie von den Permanentmagneten des Rotors zu erhalten, die für die Erzeugung eines elektrischen Generators auf der erforderlichen EMD-Welle ausreicht für diesen völlig autonomen Betrieb des Systems - Strom. Daher besteht die wichtigste Bedingung darin, ein ausreichendes Drehmoment des magnetischen Rotors dieses MD sicherzustellen, um durch den elektrischen Generator auf seiner Welle eine ausreichende Menge an Elektrizität zu erzeugen, die mehr als genug wäre, um die elektromagnetische Spule und die Nutzlast mit Energie zu versorgen einen gegebenen Wert und zum Kompensieren verschiedener unvermeidlicher Verluste in solchen elektromechanischen Systemen mit PM auf dem Rotor. Nachdem die PM 4 abgewickelt ist und der Rotor 5 Nennumdrehungen erreicht hat, schalten wir die Stromversorgung der Spule 3 direkt vom elektrischen Generator oder über einen zusätzlichen Spannungswandler um und die Starterstromquelle wird entweder vollständig abgeschaltet oder in den Lademodus versetzt vom elektrischen Generator auf der Welle dieses EMD.
NOTWENDIGER STRUKTURAUFBAU UND STEUERALGORITHMEN FÜR DEN BETRIEB DIESES MOTORGENERATORS IM MODUS „PPERP MOBILE“
Diese wichtige Bedingung für den Betrieb des DM im „Perpetuum Mobile“-Modus kann nur erfüllt werden, wenn mindestens sechs Bedingungen gleichzeitig erfüllt sind:
1. die Verwendung moderner starker Niob-Permanentmagnete in MDs, die das maximale Drehmoment eines solchen Rotors bei minimalen Abmessungen des PM liefern.
2. die Verwendung eines effektiven, äußerst kostengünstigen MD-Elektromagnetkreises auf dem MD-Stator aufgrund der extrem hohen Windungszahl in der Elektromagnetwicklung und der korrekten und effizienten Konstruktion seines Magnetkreises und seiner Wicklung.
3. die Notwendigkeit einer Startvorrichtung und einer Starterstromquelle zum Starten und Beschleunigen des MD mit der Stromversorgung der Elektromagnetspule vom Schalter.
4. der richtige Algorithmus zur Steuerung des elektrischen Stroms in der Elektromagnetwicklung in Richtung, Größe, abhängig von der Position des Rotors PM.
5. Koordination der elektrischen Parameter des elektrischen Generators und der Wicklung des Elektromagneten.
6. der richtige Algorithmus zum Umschalten der Stromversorgungskreise der Elektromagnetwicklung, wenn der elektrische Generatorkreis in den Stromversorgungskreis der Elektromagnetwicklung eingeschaltet wird und die Startstromquelle, beispielsweise AB, aus dem Entlademodus übertragen wird auf den Modus seiner elektrischen Wiederaufladung.
ALGORITHMUS ZUM SCHALTEN DES ELEKTRISCHEN STROMS IN DER ELEKTROMAGNETSPULE IN ABHÄNGIGKEIT DER POSITION DES EMD-ROTORS PM (BILD 1)
Betrachten wir den Algorithmus zum Schalten des elektrischen Stroms in der Spule bei Vorhandensein eines Stabmagneten auf dem EMD-Rotor pro Umdrehung des Rotors (Abb. 3). Um den effektiven Betrieb dieses EMD-Designs (Abb. 1) sicherzustellen , unter Verwendung der kombinierten Diagramme der Rotorposition und der Richtung des Stromflusses in der Wicklung 3 des Statorelektromagneten 1. Wie aus diesen Diagrammen hervorgeht, besteht die Essenz des korrekten Algorithmus zum Steuern des Elektromagneten 1 EMD darin, dass eine vollständige Umdrehung des PM-Rotors elektrischer Strom in der induktiven Wicklung 3 des Elektromagneten macht zwei vollständige Schwingungen .. Das heißt, mit anderen Worten, die Frequenz der elektrischen Der Strom, der der Wicklung 3 des Elektromagneten 1 mittels eines daran angebrachten elektronischen Schalters zugeführt wird, wird gesteuert durch die Befehle der Rotor-PM-Positionssensoren, ist gleich der doppelten Rotordrehzahl, und die Phase dieses elektrischen Stroms ist strikt mit der Rotor-PM-Position synchronisiert. EMD. Da der Schalter die Richtung des Stroms in der Wicklung 3 (Stromumkehr) umschaltet, tritt genau auf dem magnetischen Äquator des PM auf, wenn die Magnetpole des PM und die Magnetpole der Enden des Magnetkreises im Arbeitsspalt zusammenfallen Der Magnetkreis 2 des Elektromagneten 1 erfährt dann als Ergebnis für eine vollständige Umdrehung des PM des Rotors ständig ein beschleunigendes unidirektionales Drehmoment und zweimal von der Anziehung entgegengesetzter Magnetpole der Enden des Magnetkreises der Elektromagnet und der PM des Rotors und zweimal - aufgrund der magnetischen Abstoßungskräfte ihrer gleichen Magnetpole.
Fig. 4 Zeitdiagramm des Betriebs eines elektronischen Schalters zum Umkehren des Stroms in der Wicklung des Statorelektromagneten für eine Umdrehung des Rotors PM
Abb.5 Zyklogramm des Wechsels der Magnetpole im Spalt eines Elektromagneten für eine Umdrehung des PM des EMDG-Rotors
Zur Erklärung des Algorithmus des Elektromagneten EMD:
3.4 - Magnetpole der Enden des Lichtbogenmagnetkreises 2 des Elektromagneten 1
Die Spule mit der Wicklung 3 wird auf den Magnetkreis 2 des Elektromagneten 1 gelegt
9. Rotormagnet