डीसी यंत्र
डीसी मोटर का आविष्कार अन्य प्रकार की मशीनों से पहले किया गया था जो विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित करती हैं। हालांकि एसी मोटर हाल ही में सबसे लोकप्रिय हो गए हैं, ऐसे अनुप्रयोग हैं जहां डीसी मोटर्स का कोई विकल्प नहीं है।
डीसी और एसी मोटर
आविष्कार इतिहास
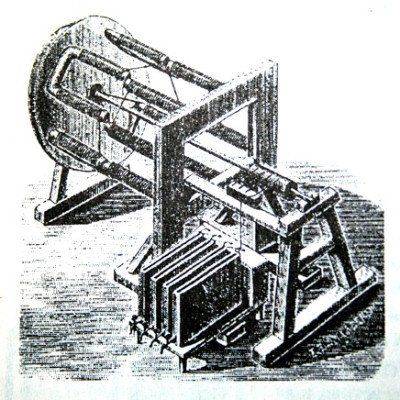
जैकोबी इलेक्ट्रिक मोटर।
डीसी इलेक्ट्रिक मोटर्स (डीसी मोटर्स) के संचालन के सिद्धांत को समझने के लिए, हम इसके निर्माण के इतिहास की ओर मुड़ते हैं। तो, पहला प्रायोगिक साक्ष्य कि विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित किया जा सकता है, माइकल फैराडे द्वारा प्रदर्शित किया गया था। 1821 में, उन्होंने पारे से भरे बर्तन में एक कंडक्टर के साथ एक प्रयोग किया, जिसके नीचे एक स्थायी चुंबक था। कंडक्टर को बिजली लगाने के बाद, यह चुंबक के चारों ओर घूमना शुरू कर देता है, जो पोत में मौजूद चुंबकीय क्षेत्र पर अपनी प्रतिक्रिया प्रदर्शित करता है। फैराडे के प्रयोग ने व्यावहारिक अनुप्रयोग नहीं पाया, लेकिन विद्युत मशीनों के निर्माण की संभावना को साबित किया और विद्युत यांत्रिकी के विकास को जन्म दिया।
पहली डीसी इलेक्ट्रिक मोटर, जो चलती भाग (रोटर) के रोटेशन के सिद्धांत पर आधारित थी, 1834 में रूसी यांत्रिक भौतिक विज्ञानी बोरिस सेमेनोविच जैकोबी द्वारा बनाई गई थी। इस उपकरण ने निम्नानुसार काम किया:
वर्णित सिद्धांत का उपयोग एक इंजन में किया गया था जिसे जैकोबी ने 1839 में 12 यात्रियों के साथ एक नाव में स्थापित किया था। जहाज धारा के विपरीत 3 किमी/घंटा की गति से झटके से आगे बढ़ रहा था (अन्य स्रोतों के अनुसार - 4.5 किमी/घंटा), लेकिन सफलतापूर्वक नदी पार कर यात्रियों को किनारे पर उतारा। 320 गैल्वेनिक कोशिकाओं वाली बैटरी को एक शक्ति स्रोत के रूप में इस्तेमाल किया गया था, और पैडल पहियों का उपयोग करके आंदोलन किया गया था।
इस मुद्दे के आगे के अध्ययन ने शोधकर्ताओं को कई प्रश्नों को हल करने के लिए प्रेरित किया कि कौन से बिजली स्रोतों का उपयोग करना सबसे अच्छा है, इसके प्रदर्शन में सुधार कैसे करें और इसके आयामों को अनुकूलित करें।
1886 में, फ्रैंक जूलियन स्प्रैग ने पहली बार एक प्रत्यक्ष वर्तमान इलेक्ट्रिक मोटर डिजाइन किया, जो आज इस्तेमाल किए गए डिजाइन के समान है। इसने आत्म-उत्तेजना के सिद्धांत और इलेक्ट्रिक मशीन की उत्क्रमणीयता के सिद्धांत को लागू किया। इस समय तक, इस प्रकार के सभी इंजन एक अधिक उपयुक्त स्रोत - एक डीसी जनरेटर से बिजली पर स्विच कर चुके हैं।
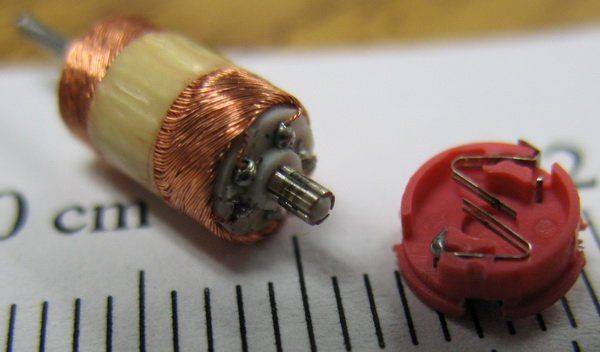
ब्रश-कलेक्टर असेंबली मशीन के स्थिर हिस्से में स्थित सर्किट के साथ रोटर सर्किट का विद्युत कनेक्शन प्रदान करती है
उपकरण और संचालन का सिद्धांत
आधुनिक डीपीटी में, एक चुंबकीय क्षेत्र के साथ एक चार्ज कंडक्टर की बातचीत के समान सिद्धांत का उपयोग किया जाता है। प्रौद्योगिकी में सुधार के साथ, डिवाइस केवल कुछ तत्वों के साथ पूरक है जो प्रदर्शन में सुधार करते हैं। उदाहरण के लिए, आजकल स्थायी चुम्बक का उपयोग केवल कम शक्ति की मोटरों में ही किया जाता है, क्योंकि बड़ी मशीनों में वे बहुत अधिक स्थान घेर लेते हैं।
मूल सिद्धांत
इस प्रकार के इंजनों के प्रारंभिक प्रोटोटाइप आधुनिक उपकरणों की तुलना में काफी सरल थे। उनके आदिम उपकरण में केवल दो चुम्बकों का एक स्टेटर और वाइंडिंग के साथ एक आर्मेचर शामिल था जिसमें करंट लगाया गया था। चुंबकीय क्षेत्रों की बातचीत के सिद्धांत का अध्ययन करने के बाद, डिजाइनरों ने निम्नलिखित इंजन संचालन एल्गोरिथ्म का निर्धारण किया:
- बिजली की आपूर्ति आर्मेचर वाइंडिंग्स पर एक विद्युत चुम्बकीय क्षेत्र बनाती है।
- विद्युत चुम्बकीय क्षेत्र के ध्रुव स्थायी चुंबक क्षेत्र के समान ध्रुवों से विकर्षित होते हैं।
- आर्मेचर, उस शाफ्ट के साथ, जिस पर यह जुड़ा हुआ है, घुमावदार के प्रतिकारक क्षेत्र के अनुसार घूमता है।
इस एल्गोरिथ्म ने सिद्धांत रूप में पूरी तरह से काम किया, लेकिन व्यवहार में, पहले इंजन के रचनाकारों को विशिष्ट समस्याओं का सामना करना पड़ा जो मशीन के संचालन को रोकते थे:
- डेड पोजीशन जिससे इंजन स्टार्ट नहीं किया जा सकता - जब डंडे एक दूसरे के बिल्कुल सामने उन्मुख हों।
- मजबूत प्रतिरोध या ध्रुवों के कमजोर प्रतिकर्षण के कारण शुरू करने में असमर्थता।
- रोटर एक क्रांति के बाद बंद हो जाता है। यह इस तथ्य के कारण है कि आधे चक्र से गुजरने के बाद, चुंबक का आकर्षण तेज नहीं हुआ, बल्कि रोटर के रोटेशन को धीमा कर दिया।
पहली समस्या का समाधान बहुत जल्दी मिल गया - इसके लिए दो से अधिक चुम्बकों का उपयोग करने का प्रस्ताव था। बाद में, मोटर डिवाइस में कई वाइंडिंग और एक कलेक्टर-ब्रश असेंबली शामिल की गई, जो एक निश्चित समय पर केवल एक जोड़ी वाइंडिंग को बिजली की आपूर्ति करती थी।
कलेक्टर-ब्रश करंट सप्लाई सिस्टम रोटर ब्रेकिंग की समस्या को भी हल करता है - पोलरिटी स्विचिंग उस समय तक होती है जब रोटर का रोटेशन धीमा होने लगता है। इसका मतलब है कि मोटर की एक क्रांति के दौरान कम से कम दो ध्रुवीय उलट होते हैं।
कम दबाव धाराओं की समस्या पर एक अलग खंड में नीचे चर्चा की गई है।
डिज़ाइन
तो, मोटर आवास पर एक स्थायी चुंबक तय किया जाता है, जिससे एक स्टेटर बनता है, जिसके अंदर रोटर स्थित होता है। आर्मेचर वाइंडिंग पर शक्ति लागू होने के बाद, एक विद्युत चुम्बकीय क्षेत्र उत्पन्न होता है जो स्टेटर के चुंबकीय क्षेत्र के साथ संपर्क करता है, इससे रोटर का घुमाव होता है, जो शाफ्ट पर कठोरता से लगाया जाता है। स्रोत से आर्मेचर में विद्युत प्रवाह को स्थानांतरित करने के लिए, इंजन एक कलेक्टर-ब्रश असेंबली से सुसज्जित है, जिसमें निम्न शामिल हैं:
- एकत्र करनेवाला। यह एक ढांकता हुआ सामग्री द्वारा अलग किए गए कई खंडों की एक वर्तमान-संग्रहित अंगूठी है, जो आर्मेचर वाइंडिंग से जुड़ी होती है और सीधे मोटर शाफ्ट पर लगाई जाती है।
- ग्रेफाइट ब्रश। वे कलेक्टर और पावर स्रोत के बीच सर्किट को ब्रश का उपयोग करके बंद कर देते हैं जो दबाव स्प्रिंग्स द्वारा कलेक्टर के संपर्क पैड के खिलाफ दबाए जाते हैं।
आर्मेचर वाइंडिंग एक छोर पर एक दूसरे से जुड़े होते हैं, और दूसरे छोर पर कलेक्टर सेक्शन से जुड़े होते हैं, इस प्रकार एक सर्किट बनाते हैं जिसके साथ निम्नलिखित मार्ग के साथ करंट प्रवाहित होता है: इनपुट ब्रश -> रोटर वाइंडिंग -> आउटपुट ब्रश।
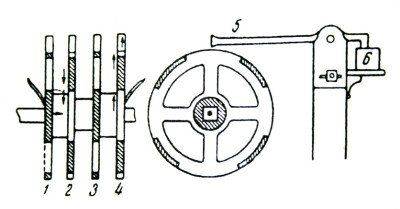
दिया गया सर्किट आरेख (चित्र 3) दो वर्गों के संग्राहक के साथ एक आदिम डीसी मोटर के संचालन के सिद्धांत को प्रदर्शित करता है:
- इस उदाहरण में, हम रोटर की प्रारंभिक स्थिति पर विचार करेंगे जैसा कि चित्र में दिखाया गया है। इसलिए, निचले ब्रश को बिजली की आपूर्ति के बाद, "+" के साथ चिह्नित किया जाता है, वर्तमान घुमावदार के माध्यम से बहती है और इसके चारों ओर एक विद्युत चुम्बकीय क्षेत्र बनाती है।
- गिमलेट नियम के अनुसार, लंगर का उत्तरी ध्रुव निचले बाएँ भाग में और दक्षिणी ध्रुव ऊपरी दाएँ भाग में बनता है। एक ही नाम के स्टेटर ध्रुवों के पास स्थित होने के कारण, वे पीछे हटना शुरू कर देते हैं, जिससे रोटर गति में आ जाता है, जो तब तक जारी रहता है जब तक कि विपरीत ध्रुव एक दूसरे से न्यूनतम दूरी पर न हों, अर्थात वे अंतिम स्थिति में आ जाते हैं (चित्र। 1) ।
- इस स्तर पर कलेक्टर के डिजाइन के परिणामस्वरूप आर्मेचर वाइंडिंग पर ध्रुवीयता उत्क्रमण होगी। इसके परिणामस्वरूप, चुंबकीय क्षेत्र के ध्रुव फिर से निकट सीमा पर होंगे और पीछे हटना शुरू कर देंगे।
- रोटर एक पूर्ण क्रांति करता है, और कलेक्टर अपने आंदोलन को जारी रखते हुए, फिर से ध्रुवीयता को उलट देता है।
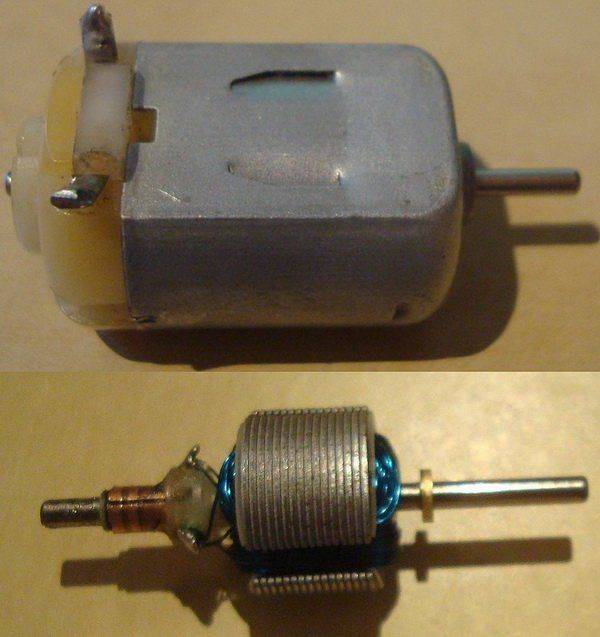
डीसी मोटर पार्ट्स
यहां, जैसा कि पहले ही उल्लेख किया गया है, एक आदिम प्रोटोटाइप के संचालन के सिद्धांत का प्रदर्शन किया जाता है। वास्तविक मोटर दो से अधिक चुम्बकों का उपयोग करते हैं, और कम्यूटेटर में अधिक संपर्क पैड होते हैं, जो सुचारू रोटेशन सुनिश्चित करता है।
उच्च शक्ति की मोटरों में उनके बड़े आकार के कारण स्थायी चुम्बकों का उपयोग संभव नहीं होता है। उनके लिए एक विकल्प कई प्रवाहकीय छड़ों की एक प्रणाली है, जिनमें से प्रत्येक की अपनी घुमावदार आपूर्ति बसबारों से जुड़ी होती है। इसी नाम के डंडे नेटवर्क में श्रृंखला में शामिल हैं। डंडे के 1 से 4 जोड़े शरीर पर मौजूद हो सकते हैं, और उनकी संख्या कलेक्टर पर वर्तमान-संग्रहित ब्रश की संख्या के अनुरूप होनी चाहिए।
उच्च शक्ति के लिए डिज़ाइन किए गए इलेक्ट्रिक मोटर्स के अपने "लाइटर" समकक्षों की तुलना में कई कार्यात्मक लाभ हैं। उदाहरण के लिए, वर्तमान-संग्रहित ब्रशों की स्थानीय व्यवस्था उन्हें शाफ्ट के सापेक्ष एक निश्चित कोण पर घुमाती है ताकि शाफ्ट के ब्रेकिंग की भरपाई की जा सके, जिसे "आर्मेचर रिएक्शन" कहा जाता है।
प्रारंभिक धाराएं
अतिरिक्त तत्वों के साथ मोटर रोटर का क्रमिक लैस करना जो इसके निर्बाध संचालन को सुनिश्चित करता है और सेक्टोरल ब्रेकिंग को बाहर करता है, इसके स्टार्ट-अप की समस्या उत्पन्न होती है। लेकिन यह सब रोटर के वजन को बढ़ाता है - शाफ्ट के प्रतिरोध को ध्यान में रखते हुए, इसे अपने स्थान से धक्का देना अधिक कठिन हो जाता है। इस समस्या का पहला समाधान जो दिमाग में आता है, वह हो सकता है कि शुरुआत में आपूर्ति की गई धारा को बढ़ाया जाए, लेकिन इससे अप्रिय परिणाम हो सकते हैं:
- लाइन का सर्किट ब्रेकर करंट का सामना नहीं करेगा और बंद हो जाएगा;
- अधिभार से घुमावदार तार जल जाएंगे;
- कलेक्टर पर स्विचिंग सेक्टरों को ओवरहीटिंग से वेल्डेड किया जाएगा।
इसलिए, इस तरह के निर्णय को जोखिम भरा आधा उपाय कहा जा सकता है।
सामान्य तौर पर, यह समस्या डीसी मोटर्स का मुख्य नुकसान है, लेकिन इसमें उनका मुख्य लाभ भी शामिल है, जिसके कारण वे कुछ क्षेत्रों में अपरिहार्य हैं। यह लाभ स्टार्ट-अप के तुरंत बाद टोक़ के सीधे हस्तांतरण में निहित है - शाफ्ट (यदि यह चलना शुरू हो जाता है) किसी भी भार के साथ घूमेगा। एसी मोटर्स इसके लिए सक्षम नहीं हैं।
अभी तक इस समस्या का पूरी तरह से समाधान नहीं हो सका है। आज तक, ऐसे इंजन शुरू करने के लिए, एक स्वचालित स्टार्टर का उपयोग किया जाता है, जिसके संचालन का सिद्धांत ऑटोमोबाइल गियरबॉक्स के समान है:
- सबसे पहले, वर्तमान धीरे-धीरे प्रारंभिक मूल्य तक बढ़ जाता है।
- जगह से "शिफ्ट" के बाद, वर्तमान मूल्य तेजी से गिरता है और फिर से "शाफ्ट के रोटेशन को समायोजित करना" सुचारू रूप से बढ़ जाता है।
- सीमा मूल्य तक बढ़ने के बाद, वर्तमान ताकत फिर से घट जाती है और "समायोजित" हो जाती है।
यह चक्र 3-5 बार दोहराया जाता है (चित्र 4) और नेटवर्क में महत्वपूर्ण भार की घटना के बिना इंजन शुरू करने की आवश्यकता को हल करता है। वास्तव में, अभी भी कोई "नरम" शुरुआत नहीं है, लेकिन उपकरण सुरक्षित रूप से काम करता है, और डीसी मोटर का मुख्य लाभ - टोक़ - संरक्षित है।
तारोंके चित्र
डीसी मोटर को कनेक्ट करना एसी विनिर्देशन वाले मोटरों की तुलना में कुछ अधिक कठिन है।
उच्च और मध्यम शक्ति के मोटर्स, एक नियम के रूप में, टर्मिनल बॉक्स में विशेष फील्ड वाइंडिंग (ओबी) और आर्मेचर संपर्क होते हैं। सबसे अधिक बार, स्रोत के आउटपुट वोल्टेज को आर्मेचर पर लागू किया जाता है, और वर्तमान, एक नियम के रूप में, एक रिओस्तात द्वारा समायोजित, ओबी पर लागू होता है। मोटर के घूमने की गति सीधे उत्तेजना वाइंडिंग पर लागू करंट की ताकत पर निर्भर करती है।
डीसी मोटर्स की आर्मेचर और उत्तेजना वाइंडिंग पर स्विच करने के लिए तीन मुख्य योजनाएं हैं:
- श्रृंखला उत्तेजना का उपयोग मोटर्स में किया जाता है जिसके लिए शुरुआत में एक बड़े प्रवाह की आवश्यकता होती है (इलेक्ट्रिक वाहन, किराये के उपकरण, आदि)। यह योजना स्रोत से ओएफ और आर्मेचर के सीरियल कनेक्शन के लिए प्रदान करती है। वोल्टेज लगाने के बाद, समान परिमाण की धाराएं आर्मेचर वाइंडिंग और ओबी से गुजरती हैं। यह ध्यान में रखा जाना चाहिए कि अनुक्रमिक उत्तेजना के साथ शाफ्ट पर भार को एक चौथाई तक कम करने से गति में तेज वृद्धि होगी, जिससे हो सकता है इंजन का टूटना, इसलिए इस सर्किट का उपयोग निरंतर भार की स्थितियों में किया जाता है।
- समानांतर उत्तेजना का उपयोग मोटरों में किया जाता है जो मशीन टूल्स, प्रशंसकों और अन्य उपकरणों के संचालन को सुनिश्चित करते हैं जो स्टार्ट-अप के समय शाफ्ट पर अधिक भार नहीं डालते हैं। इस सर्किट में, ओएफ को उत्तेजित करने के लिए एक स्वतंत्र वाइंडिंग का उपयोग किया जाता है, जिसे अक्सर रिओस्तात द्वारा नियंत्रित किया जाता है।
- स्वतंत्र उत्तेजना समानांतर उत्तेजना के समान है, लेकिन इस मामले में, ओबी को बिजली की आपूर्ति के लिए एक स्वतंत्र स्रोत का उपयोग किया जाता है, जो आर्मेचर और उत्तेजना घुमावदार के बीच विद्युत कनेक्शन की उपस्थिति को समाप्त करता है।
आधुनिक डीसी इलेक्ट्रिक मोटर्स में, वर्णित तीन के आधार पर मिश्रित सर्किट का उपयोग किया जा सकता है।
रोटेशन गति समायोजन
डीपीटी की गति को विनियमित करने का तरीका इसके कनेक्शन की योजना पर निर्भर करता है:
- समानांतर उत्तेजना वाले मोटर्स में, नाममात्र मूल्य के सापेक्ष गति में कमी आर्मेचर वोल्टेज को बदलकर और उत्तेजना प्रवाह को कमजोर करके वृद्धि की जा सकती है। गति बढ़ाने के लिए (नाममात्र मूल्य के सापेक्ष 4 गुना से अधिक नहीं), ओबी सर्किट में एक रिओस्तात जोड़ा जाता है।
- सीरियल उत्तेजना के साथ, आर्मेचर सर्किट में एक चर प्रतिरोध द्वारा समायोजन आसानी से किया जाता है। सच है, यह विधि केवल गति को कम करने के लिए उपयुक्त है और केवल 1:3 या 1:2 के अनुपात में है (इसके अलावा, इससे रिओस्तात में बड़े नुकसान होते हैं)। ओबी सर्किट में समायोजन रिओस्तात का उपयोग करके वृद्धि की जाती है।
आधुनिक हाई-टेक उपकरणों में इन सर्किटों का उपयोग शायद ही कभी किया जाता है, क्योंकि उनके पास एक संकीर्ण समायोजन सीमा और अन्य नुकसान हैं। आजकल, इन उद्देश्यों के लिए इलेक्ट्रॉनिक नियंत्रण सर्किट तेजी से बनाए जा रहे हैं।
पीछे
डीसी मोटर के रोटेशन को रिवर्स (रिवर्स) करने के लिए, आपको यह करना होगा:
- धारावाहिक उत्तेजना के साथ - बस इनपुट संपर्कों की ध्रुवीयता बदलें;
- मिश्रित और समानांतर उत्तेजना के साथ - आर्मेचर वाइंडिंग में करंट की दिशा बदलना आवश्यक है; ओएफ के टूटने से इंजेक्टेड इलेक्ट्रोमोटिव बल में महत्वपूर्ण वृद्धि हो सकती है और तार इन्सुलेशन का टूटना हो सकता है।
आवेदन की गुंजाइश
जैसा कि आप पहले ही समझ चुके हैं, डीसी मोटर्स का उपयोग उन स्थितियों में उचित है जहां नेटवर्क से स्थायी निर्बाध कनेक्शन संभव नहीं है। यहां एक अच्छा उदाहरण एक कार स्टार्टर है जो एक आंतरिक दहन इंजन "एक जगह से" या मोटर के साथ बच्चों के खिलौने को धक्का देता है। इन मामलों में, इंजन शुरू करने के लिए बैटरी का उपयोग किया जाता है। औद्योगिक उद्देश्यों के लिए, डीपीटी का उपयोग रोलिंग मिलों में किया जाता है।
डीपीटी के आवेदन का मुख्य क्षेत्र विद्युत परिवहन है। स्टीमबोट, इलेक्ट्रिक लोकोमोटिव, ट्राम, ट्रॉलीबस और अन्य समान में एक बहुत बड़ा प्रारंभिक प्रतिरोध होता है, जिसे केवल डीसी मोटर्स की मदद से उनकी नरम विशेषताओं और रोटेशन विनियमन की विस्तृत सीमा के साथ दूर किया जा सकता है। पर्यावरण परिवहन प्रौद्योगिकियों के तेजी से विकास और लोकप्रियकरण को देखते हुए, डीपीटी का दायरा केवल बढ़ रहा है।

सबसे सरल ब्रश-कलेक्टर असेंबली
फायदे और नुकसान
उपरोक्त सभी को सारांशित करते हुए, एसी पर संचालित करने के लिए डिज़ाइन किए गए उनके समकक्षों के सापेक्ष डीसी मोटर्स के फायदे और नुकसान की विशेषता का वर्णन करना संभव है।
मुख्य लाभ:
- डीसीटी उन स्थितियों में अपरिहार्य हैं जहां एक मजबूत प्रारंभिक टोक़ की आवश्यकता होती है;
- आर्मेचर रोटेशन की गति आसानी से समायोज्य है;
- डीसी मोटर एक यूनिवर्सल इलेक्ट्रिक मशीन है, यानी इसे जनरेटर के रूप में इस्तेमाल किया जा सकता है।
मुख्य नुकसान:
- डीपीटी की उच्च उत्पादन लागत होती है;
- ब्रश-कलेक्टर असेंबली के उपयोग से लगातार रखरखाव और मरम्मत की आवश्यकता होती है;
- संचालित करने के लिए एक डीसी बिजली की आपूर्ति या रेक्टिफायर की आवश्यकता होती है।
डीसी मोटर्स, निश्चित रूप से, लागत और विश्वसनीयता के मामले में अपने "परिवर्तनीय" रिश्तेदारों से हार जाते हैं, हालांकि, उनका उपयोग किया जाता है और उनका उपयोग किया जाएगा, क्योंकि कुछ क्षेत्रों में उनके उपयोग के फायदे स्पष्ट रूप से सभी नुकसानों को पार करते हैं।