सदा विद्युत चुम्बकीय मोटर-जनरेटर
यह लेख स्टेटर पर एक इलेक्ट्रोमैग्नेट के साथ एक नए प्रकार के एक साधारण मूल "सदा" विद्युत चुम्बकीय मोटर-जनरेटर के संचालन, डिजाइन और विद्युत सर्किट के विकास और विवरण के लिए समर्पित है और केवल एक स्थायी चुंबक (पीएम) है। रोटर, इस इलेक्ट्रोमैग्नेट के वर्किंग गैप में इस पीएम के घूमने के साथ।
स्टेटर पर इलेक्ट्रोमैग्नेट और रोटर पर मैग्नेट के साथ परपेचुअल इलेक्ट्रोमैग्नेटिक मोटर-जेनरेटर
1 परिचय
2. स्थायी चुम्बक में कितनी ऊर्जा छिपी होती है और यह कहाँ से आती है?
3. पीएम . के साथ इलेक्ट्रोमैग्नेटिक मोटर्स और जेनरेटर की संक्षिप्त समीक्षा
4. एक प्रत्यावर्ती धारा विद्युत चुंबक के साथ आधुनिकीकृत विद्युत चुम्बकीय मोटर-जनरेटर के डिजाइन और इलेक्ट्रिक्स का विवरण
5. रोटर पर बाहरी पीएम के साथ प्रतिवर्ती विद्युत चुम्बकीय मोटर
6. "सदा" विद्युत चुम्बकीय मोटर-जनरेटर के काम का विवरण
7. "सतत गति" मोड में इस विद्युत चुम्बकीय मोटर-जनरेटर के संचालन के लिए आवश्यक नोड्स और नियंत्रण एल्गोरिदम
8. चुंबकीय की स्थिति के आधार पर विद्युत चुंबक घुमाव में रिवर्स विद्युत प्रवाह के लिए एल्गोरिदम
9. ईएमडीजी के लिए तत्वों और उपकरणों का चयन और गणना
10. कम लागत वाली इलेक्ट्रोमैग्नेट ईएमडी (डिजाइन और गणना की मूल बातें)
11. ईएमडी रोटर के स्थायी चुंबक का सही विकल्प
12. ईएमडीजी के प्रोटोटाइप के लिए एक विद्युत जनरेटर का विकल्प
13. सदा शटर विद्युत चुम्बकीय मोटर-जनरेटर
14. एक पारंपरिक प्रेरण विद्युत मीटर पर स्थायी विद्युत चुम्बकीय मोटर
15. एनालॉग्स के साथ नए ईएमडीएच के ऊर्जा प्रदर्शन की तुलना
16. निष्कर्ष
परिचय
कई सदियों से परपेचुअल मोशन मशीन बनाने की समस्या दुनिया भर के कई अन्वेषकों और वैज्ञानिकों के दिमाग को उत्साहित करती है और आज भी प्रासंगिक है।
विश्व समुदाय से "सतत गति मशीनों" के इस विषय में रुचि अभी भी बहुत बड़ी और बढ़ रही है, क्योंकि सभ्यता की ऊर्जा की जरूरतें बढ़ती हैं और जैविक गैर-नवीकरणीय ईंधन की आसन्न थकावट के संबंध में, और विशेष रूप से शुरुआत के संबंध में सभ्यता की वैश्विक ऊर्जा और पर्यावरणीय संकट। भविष्य के समाज के निर्माण में, निश्चित रूप से, नए ऊर्जा स्रोतों को विकसित करना महत्वपूर्ण है जो हमारी जरूरतों को पूरा कर सकते हैं। और आज रूस और कई अन्य देशों के लिए यह बस महत्वपूर्ण है। भविष्य में देश की रिकवरी और आने वाले ऊर्जा संकट में, नई तकनीकों पर आधारित ऊर्जा के नए स्रोत नितांत आवश्यक होंगे।
कई प्रतिभाशाली आविष्कारकों, इंजीनियरों और वैज्ञानिकों की आंखें लंबे समय से स्थायी चुंबक (पीएम) और उनकी रहस्यमय और अद्भुत ऊर्जा पर टिकी हुई हैं। इसके अलावा, मजबूत पीएम के निर्माण में महत्वपूर्ण प्रगति के कारण, और आंशिक रूप से चुंबकीय मोटर्स (एमएफ) के प्रस्तावित डिजाइनों की सादगी के कारण, हाल के वर्षों में पीएम में यह दिलचस्पी बढ़ी है।
स्थायी चुम्बक में कितनी ऊर्जा छिपी होती है और यह कहाँ से आती है?
यह स्पष्ट है कि आधुनिक कॉम्पैक्ट और शक्तिशाली पीएम में चुंबकीय क्षेत्र की महत्वपूर्ण गुप्त ऊर्जा होती है। और ऐसे चुंबकीय मोटर्स और जनरेटर के आविष्कारकों और डेवलपर्स का लक्ष्य पीएम की इस गुप्त ऊर्जा को अन्य प्रकार की ऊर्जा में अलग करना और परिवर्तित करना है, उदाहरण के लिए, चुंबकीय रोटर के निरंतर घूर्णन की यांत्रिक ऊर्जा या बिजली में। दहन के दौरान कोयला 33 जे प्रति ग्राम, तेल, जो 10-15 वर्षों में हमारे देश में समाप्त होना शुरू हो जाएगा, 44 जे प्रति ग्राम छोड़ता है, यूरेनियम का एक ग्राम 43 अरब जे ऊर्जा देता है। एक स्थायी चुंबक में सैद्धांतिक रूप से 17 अरब जूल ऊर्जा होती है। एक ग्राम के लिए। बेशक, पारंपरिक ऊर्जा स्रोतों के साथ, चुंबक की दक्षता एक सौ प्रतिशत नहीं होगी, इसके अलावा, फेराइट चुंबक का जीवनकाल लगभग 70 वर्ष होता है, बशर्ते कि यह मजबूत भौतिक, तापमान और चुंबकीय भार के अधीन न हो, हालांकि , उसमें ऊर्जा की इतनी मात्रा निहित है, यह इतना महत्वपूर्ण नहीं है। इसके अलावा, पहले से ही दुर्लभ धातुओं से बने बड़े पैमाने पर उत्पादित औद्योगिक चुंबक हैं, जो फेराइट की तुलना में दस गुना मजबूत हैं और इसलिए अधिक कुशल हैं। एक चुंबक जिसने अपनी ताकत खो दी है, उसे एक मजबूत चुंबकीय क्षेत्र के साथ "रिचार्ज" किया जा सकता है। हालाँकि, सवाल "पीएम में इतनी ऊर्जा कहाँ से आती है" विज्ञान में खुला रहता है। कई वैज्ञानिकों का मानना है कि पीएम में ऊर्जा लगातार बाहर से ईथर (भौतिक निर्वात) से आती है। और अन्य शोधकर्ताओं का तर्क है कि यह केवल पीएम की चुंबकीय सामग्री के कारण अपने आप में उत्पन्न होता है। अभी तक कोई स्पष्टता नहीं है।
ज्ञात इलेक्ट्रोमैग्नेटिक मोटर्स और जेनरेटर की संक्षिप्त समीक्षा
दुनिया में चुंबकीय मोटर्स के विभिन्न डिजाइनों के लिए पहले से ही कई पेटेंट और इंजीनियरिंग समाधान हैं - लेकिन अभी तक प्रदर्शन पर "सतत गति" मोड में व्यावहारिक रूप से ऐसे कोई ऑपरेटिंग एमडी नहीं हैं। और अब तक, "सतत" औद्योगिक चुंबकीय मोटर्स (आईएम) को एक श्रृंखला में नहीं बनाया और महारत हासिल किया गया है और वास्तविकता में पेश नहीं किया जा रहा है, और इससे भी ज्यादा, वे अभी तक खुली बिक्री पर नहीं हैं। दुर्भाग्य से, पेरेनदेव (जर्मनी) और अकोइल-ऊर्जा से धारावाहिक चुंबकीय मोटर-जनरेटर के बारे में इंटरनेट पर प्रसिद्ध जानकारी की अभी तक पुष्टि नहीं हुई है। एमडी में धातु में धीमी वास्तविक प्रगति के कई संभावित कारण हैं, लेकिन जाहिर तौर पर दो मुख्य कारण हैं: या तो इन विकासों के वर्गीकरण के कारण, उन्हें बड़े पैमाने पर उत्पादन में नहीं लाया जाता है या पायलट औद्योगिक नमूनों के कम ऊर्जा प्रदर्शन के कारण एमडी की। यह ध्यान दिया जाना चाहिए कि यांत्रिक कम्पेसाटर और चुंबकीय स्क्रीन के साथ विशुद्ध रूप से चुंबकीय मोटर्स बनाने की कुछ समस्याएं, उदाहरण के लिए, पर्दा-प्रकार एमडी, अभी तक विज्ञान और प्रौद्योगिकी द्वारा पूरी तरह से हल नहीं हुई हैं।
कुछ ज्ञात एमडी का वर्गीकरण और संक्षिप्त विश्लेषण
- मैग्नेटो-मैकेनिकल मैग्नेटिक मोटर्स डुडीशेव/ 1-3/. अपने रचनात्मक शोधन के साथ, वे "सतत गति" मोड में अच्छी तरह से काम कर सकते हैं।
- इंजन एमडी कलिनिना- एक घूर्णन चुंबकीय स्क्रीन के साथ निष्क्रिय पारस्परिक एमडी - वसंत कम्पेसाटर के कारण एमडी सही डिजाइन समाधान में नहीं लाया गया।
- विद्युत चुम्बकीय मोटर "पेरेंदेव"- रोटर पर पीएम के साथ एक क्लासिक इलेक्ट्रोमैग्नेटिक मोटर और एक कम्पेसाटर, उन क्षेत्रों में कम्यूटेशन प्रक्रिया के बिना निष्क्रिय है जहां रोटर को पीएम के साथ रखने के मृत बिंदु गुजरते हैं। इसमें दो प्रकार के स्विचिंग संभव हैं (रोटर के पीएम के "होल्डिंग पॉइंट" को पारित करने की अनुमति - यांत्रिक और विद्युत चुम्बकीय। पहला स्वचालित रूप से समस्या को SMOT'a के लूपेड संस्करण में कम कर देता है (और रोटेशन की गति को सीमित करता है, और इसलिए शक्ति), दूसरा कम है। "सदा इंजन" में काम नहीं कर सकता।
- मिनाटो विद्युतचुंबकीय मोटर- एक पीएम रोटर और एक विद्युत चुम्बकीय कम्पेसाटर के साथ एक विद्युत चुम्बकीय मोटर का एक उत्कृष्ट उदाहरण जो "होल्डिंग पॉइंट" के चुंबकीय रोटर के पारित होने को सुनिश्चित करता है (मिनाटो के अनुसार, "पतन बिंदु")। सिद्धांत रूप में, यह बढ़ी हुई दक्षता के साथ सिर्फ एक कार्यशील विद्युत चुम्बकीय मोटर है। "सतत" एमडी मोड में अधिकतम प्राप्त करने योग्य दक्षता लगभग 100% निष्क्रिय है।
- जॉनसन मोटर- एक कम्पेसाटर के साथ पेरेनदेव इलेक्ट्रोमैग्नेटिक मोटर का एक एनालॉग, लेकिन इससे भी कम ऊर्जा के साथ।
- Shkondin चुंबकीय मोटर-जनरेटर- पीएम के साथ एक इलेक्ट्रोमैग्नेटिक मोटर, पीएम के चुंबकीय प्रतिकर्षण की ताकतों पर काम कर रही है (बिना किसी प्रतिपूरक के)। यह संरचनात्मक रूप से जटिल है, इसमें कलेक्टर-ब्रश असेंबली है, इसकी दक्षता है लगभग 70-80%। शाश्वत एमडी मोड में निष्क्रिय।
- एडम्स इलेक्ट्रोमैग्नेटिक मोटर-जेनरेटर- यह वास्तव में सभी ज्ञात में सबसे उन्नत है - एक विद्युत चुम्बकीय मोटर-जनरेटर जो शकोंडिन के मोटर-व्हील की तरह काम करता है, केवल इलेक्ट्रोमैग्नेट्स के सिरों से पीएम के चुंबकीय प्रतिकर्षण की ताकतों पर। लेकिन यह पीएम-आधारित मोटर-जनरेटर शकोंडिन के चुंबकीय मोटर-जनरेटर की तुलना में संरचनात्मक रूप से बहुत सरल है। सिद्धांत रूप में, इसकी दक्षता केवल 100% तक पहुंच सकती है, लेकिन केवल तभी जब इलेक्ट्रोमैग्नेट वाइंडिंग को चार्ज किए गए कैपेसिटर से छोटी उच्च-तीव्रता वाली पल्स द्वारा स्विच किया जाता है। "शाश्वत" एमडी मोड में निष्क्रिय।
- दुदिशेव विद्युत चुम्बकीय मोटर. बाहरी चुंबकीय रोटर और केंद्रीय स्टेटर इलेक्ट्रोमैग्नेट के साथ प्रतिवर्ती विद्युत चुम्बकीय मोटर)। चुंबकीय सर्किट / 3 / के खुलेपन के कारण इसकी दक्षता 100% से अधिक नहीं है। इस ईएमडी का संचालन में परीक्षण किया गया है (लेआउट की तस्वीर उपलब्ध है)।
अन्य ईएमडी भी ज्ञात हैं, लेकिन उनके लगभग समान संचालन सिद्धांत हैं। लेकिन फिर भी, दुनिया में चुंबकीय मोटर्स के सिद्धांत और व्यवहार का विकास अभी भी धीरे-धीरे चल रहा है। और विशेष रूप से एमडी में मूर्त वास्तविक प्रगति को कम लागत वाले संयुक्त मैग्नेटो-इलेक्ट्रोमैग्नेटिक मोटर्स के लिए अत्यधिक कुशल स्थायी मैग्नेट के उपयोग के साथ ठीक से रेखांकित किया गया है। विश्व समुदाय के लिए इस तरह के महत्व के इन निकटतम एनालॉग्स - स्थायी चुंबकीय मोटर्स के प्रोटोटाइप कहलाते हैं - इलेक्ट्रोमैग्नेट के साथ इलेक्ट्रोमैग्नेटिक मोटर-जनरेटर (ईएमडीजी) और स्टेटर या रोटर पर स्थायी मैग्नेट। इसके अलावा, वे पहले से ही वास्तव में मौजूद हैं, उनमें लगातार सुधार किया जा रहा है, और उनमें से कुछ पहले से ही बड़े पैमाने पर उत्पादित हैं। तस्वीरों और उनके प्रयोगात्मक अध्ययनों के साथ उनके डिजाइनों के बारे में इंटरनेट और लेखों पर बहुत सारे संदेश दिखाई दिए। उदाहरण के लिए, प्रभावी, पहले से ही धातु में परीक्षण किया गया, अपेक्षाकृत कम लागत वाले एडम्स इलेक्ट्रोमैग्नेटिक मोटर-जनरेटर /1/ ज्ञात हैं। इसके अलावा, संयुक्त ईएमडीजी के कुछ सरलतम डिजाइन पहले ही बड़े पैमाने पर उत्पादन और बड़े पैमाने पर कार्यान्वयन तक पहुंच चुके हैं। ये हैं, उदाहरण के लिए, इलेक्ट्रिक साइकिल पर इस्तेमाल किए जाने वाले शकोंडिन के सीरियल इलेक्ट्रोमैग्नेटिक मोटर-व्हील्स।
हालांकि, सभी ज्ञात ईएमडीजी के डिजाइन और पावर इंजीनियरिंग अभी भी अक्षम हैं, जो उन्हें "सतत गति" मोड में संचालित करने की अनुमति नहीं देता है, अर्थात। बाहरी शक्ति स्रोत के बिना।
फिर भी, ज्ञात ईएमडीजी के रचनात्मक और मौलिक ऊर्जा सुधार के तरीके हैं। और यह ठीक ऐसे अधिक ऊर्जावान रूप से उन्नत विकल्प हैं जो इस कठिन कार्य का सामना कर सकते हैं - एक "सतत" विद्युत चुम्बकीय मोटर-जनरेटर के मोड में पूरी तरह से स्वायत्त संचालन - बाहरी स्रोत से बिजली की खपत के बिना, और इस लेख में माना जाता है।
यह लेख स्टेटर पर एक आर्क इलेक्ट्रोमैग्नेट के साथ एक नए प्रकार के एक साधारण विद्युत चुम्बकीय मोटर-जनरेटर के मूल डिजाइन के संचालन के सिद्धांत के विकास और विवरण के लिए समर्पित है और रोटर पर केवल एक स्थायी चुंबक (पीएम) के साथ है। इलेक्ट्रोमैग्नेट के गैप में इस पीएम का ध्रुवीय घुमाव, जो कि मोड में काफी संचालित होता है " सदा गति जनरेटर।
पहले और आंशिक रूप से, एक अलग प्रतिवर्ती संस्करण में इस तरह के असामान्य ध्रुवीय ईएमडी के इस डिजाइन का पहले ही लेख के लेखक के मौजूदा मॉक-अप पर परीक्षण किया जा चुका है और इसने संचालन क्षमता और काफी उच्च ऊर्जा प्रदर्शन दिखाया है।
आधुनिक ईएमडीजी के डिजाइन और विद्युत परिपथ का विवरण
Fig.1 रोटर पर PM के साथ विद्युत चुम्बकीय मोटर-जनरेटर, स्टेटर पर एक बाहरी प्रत्यावर्ती धारा विद्युत चुंबक और चुंबकीय रोटर शाफ्ट पर एक विद्युत जनरेटर
इस प्रकार के विद्युत चुम्बकीय मोटर-जनरेटर (ईएमजी) और उसके विद्युत भाग का एक सरलीकृत डिजाइन अंजीर में दिखाया गया है। 1. इसमें तीन मुख्य इकाइयाँ होती हैं - स्टेटर पर एक इलेक्ट्रोमैग्नेट के साथ सीधे एमडी और रोटर पर पीएम और एमडी के साथ एक ही शाफ्ट पर एक इलेक्ट्रोमैकेनिकल जनरेटर। एमडी डिवाइस में एक स्टेटर स्टेटिक इलेक्ट्रोमैग्नेट 1 होता है, जो इस इलेक्ट्रोमैग्नेट के इंडक्टिव कॉइल 3 के साथ कट आउट या आर्क मैग्नेटिक सर्किट 2 के साथ कुंडलाकार खंड पर बना होता है और इससे जुड़ी कॉइल 3 में करंट रिवर्सल के लिए एक इलेक्ट्रॉनिक स्विच होता है। स्थायी चुंबक (पीएम) 4 इस इलेक्ट्रोमैग्नेट के कामकाजी अंतराल में रोटर 5 पर कठोरता से रखा गया है। ईएमडी के रोटर 5 का रोटेशन शाफ्ट विद्युत जनरेटर के शाफ्ट 7 से युग्मन द्वारा जुड़ा हुआ है। डिवाइस सुसज्जित है सबसे सरल नियामक के साथ - एक इलेक्ट्रॉनिक स्विच 6, (स्वायत्त इन्वर्टर), एक साधारण पुल अर्ध-नियंत्रित स्वायत्त इन्वर्टर की योजना के अनुसार बनाया गया है, जो विद्युत रूप से इंडक्टिव वाइंडिंग 3 इलेक्ट्रोमैग्नेट 2 और बिजली आपूर्ति इनपुट के माध्यम से आउटपुट से जुड़ा है - से बिजली का एक स्वायत्त स्रोत 10. इसके अलावा, इलेक्ट्रोमैग्नेट 1 की प्रतिवर्ती आगमनात्मक घुमावदार 3 इस स्विच 6 के वैकल्पिक वर्तमान विकर्ण में शामिल है और डीसी सर्किट के माध्यम से यह स्विच 6 एक बफर डीसी स्रोत 10 से जुड़ा है, उदाहरण के लिए, एसीसी के लिए इलेक्ट्रिक मशीन जनरेटर 8 का इलेक्ट्रिक आउटपुट या तो सीधे इंडक्टिव कॉइल 3 की वाइंडिंग से जुड़ा होता है, या एक इंटरमीडिएट इलेक्ट्रॉनिक रेक्टिफायर (नहीं दिखाया गया) के माध्यम से एक बफर डीसी स्रोत (एबी टाइप) 7 से जुड़ा होता है।
ब्रिज सिंपल इलेक्ट्रॉनिक स्विच (ऑटोनॉमस इन्वर्टर) 4 सेमीकंडक्टर वॉल्व पर बना होता है, जिसमें ब्रिज के आर्म्स में दो पावर ट्रांजिस्टर 9 और वन-वे कंडक्शन (डायोड) 10 की दो बेकाबू नॉन-कॉन्टैक्ट कुंजियाँ होती हैं। स्थिति के दो सेंसर 11 पीएम चुंबक के रोटर 6 के इस एमडी 5 के इलेक्ट्रोमैग्नेटिक स्टेटर 1 पर, इसके आंदोलन 15 के प्रक्षेपवक्र के पास, और रोटर के पीएम-चुंबक 5 के स्थिति सेंसर के रूप में, चुंबकीय के सरल संपर्क सेंसर क्षेत्र की तीव्रता - रीड स्विच का उपयोग किया जाता है। रोटर 5 के चुंबक 4 के ये स्थिति सेंसर 11 को चतुर्भुज में रखा गया है - एक सेंसर ध्रुवों के साथ सोलनॉइड के अंत के पास स्थित है और दूसरा पीएम 5 के रोटेशन पथ के पास 90 डिग्री (रीड स्विच) द्वारा स्थानांतरित किया गया है। रोटर 6. इन पोजीशन सेंसर के आउटपुट, रोटर के 11 बजे 5 बजे, रीड स्विच होते हैं, रिले एक एम्पलीफाइंग लॉजिक डिवाइस 12 के माध्यम से ट्रांजिस्टर 9 के नियंत्रण इनपुट से जुड़े होते हैं। एक उपयोगी विद्युत भार 13 आउटपुट वाइंडिंग से जुड़ा होता है एक स्विच के माध्यम से विद्युत जनरेटर 8 (दिखाया नहीं गया)। डीसी प्रारंभिक इकाई से विद्युत जनरेटर 8 (दिखाया नहीं गया) से पूर्ण बिजली की आपूर्ति पर स्विच करें।
हम एनालॉग्स की तुलना में ऐसे एमडी की मुख्य डिजाइन विशेषताओं पर ध्यान देते हैं:
1. एक बहु-मोड़ किफायती कम-एम्पीयर चाप विद्युत चुंबक का उपयोग किया जाता है।
2. रोटर 5 का स्थायी चुंबक 4 चाप इलेक्ट्रोमैग्नेट 1 के अंतराल में घूमता है, ठीक पीएम 5 के आकर्षण और प्रतिकर्षण के चुंबकीय बलों द्वारा। के अंतराल में चुंबकीय ध्रुवों की चुंबकीय ध्रुवता में परिवर्तन के कारण यह इलेक्ट्रोमैग्नेट, जब इलेक्ट्रोमैग्नेट के कॉइल 3 में वर्तमान दिशा 1 स्थिति सेंसर की कमांड रोटर 5 के चुंबक 4 के 11 बजे। हम यह भी ध्यान देते हैं कि प्रदर्शन करने के लिए रोटर 5 को गैर-चुंबकीय सामग्री से बड़े पैमाने पर बनाने की सलाह दी जाती है। जड़त्वीय चक्का का उपयोगी कार्य।
रोटर पर बाहरी पीएम के साथ प्रतिवर्ती विद्युत चुम्बकीय मोटर
सिद्धांत रूप में, ईएमडी डिजाइन का एक प्रतिवर्ती संस्करण भी संभव है, जिसमें रिम पर एक स्थायी चुंबक पीएम के साथ रोटर को इलेक्ट्रोमैग्नेट के बाहर रखा जाता है। पहले, एक प्रतिवर्ती ईएमडी का ऐसा संस्करण लेख के लेखक द्वारा विकसित किया गया था, जिसे काम में बनाया और सफलतापूर्वक परीक्षण किया गया था, और 1986 में वापस। नीचे, चित्र 2,3 में, इस तरह के पहले परीक्षण किए गए एक सरलीकृत डिज़ाइन भी है। EMDG, लेखक के लेखों में पहले वर्णित / 2-3/
रोटर पर बाहरी स्थायी चुंबक के साथ सरलतम ईएमडी के लेआउट का डिज़ाइन (अपूर्ण) और हटाए गए ईएमडी स्टेटर इलेक्ट्रोमैग्नेट के साथ फोटो में दिखाया गया है (चित्र 3)। वास्तव में, विद्युत चुंबक को नियमित रूप से एक बेलनाकार ढांकता हुआ गैर-चुंबकीय पारदर्शी सिलेंडर के केंद्र में एक शीर्ष कवर के साथ रखा जाता है, जिस पर इस ईएमडी का रोटेशन शाफ्ट लगा होता है। फोटो में स्विच और अन्य इलेक्ट्रिक्स नहीं दिखाए गए हैं।
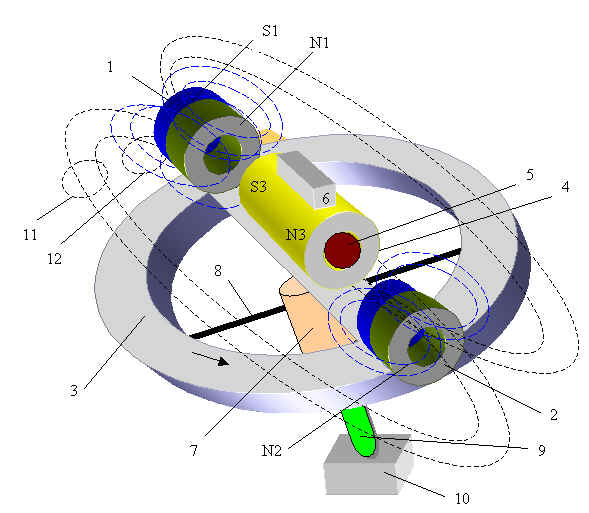
Fig.2 बाहरी एमपी-चुंबकीय रोटर के साथ प्रतिवर्ती ईएमडीजी (अपूर्ण डिजाइन)
पदनाम:
1. स्थायी चुंबक (पीएम1)
2. स्थायी चुंबक (पीएम2)
3. EMD कुंडलाकार रोटर (PM1.2 रोटर पर सख्ती से रखा गया)
4. एक निश्चित स्टेटर इलेक्ट्रोमैग्नेट की घुमावदार (स्वतंत्र निलंबन)
5. सोलनॉइड चुंबकीय सर्किट
6. पीएम रोटर स्थिति सेंसर
7. रोटर शाफ्ट (गैर-चुंबकीय असर)
8. कुंडलाकार रोटर और उसके शाफ्ट के यांत्रिक कनेक्शन प्रवक्ता
9. सहायक शाफ्ट
10. समर्थन
11. विद्युत चुंबक की विद्युत चुंबकीय रेखाएं
12. स्थायी चुंबक की चुंबकीय रेखाएं तीर रोटर के घूर्णन की दिशा दिखाती है 3

Fig.3 सबसे सरल ईएमडीजी लेआउट का फोटो (विद्युत चुंबक को हटाकर)
"सदा" विद्युत चुम्बकीय मोटर-जनरेटर के काम का विवरण (चित्र। 1)
उपकरण - यह स्थायी विद्युत चुम्बकीय मोटर - जनरेटर (चित्र 1) निम्नानुसार काम करता है।
चुंबकीय रोटर EMDG को एक स्थिर गति से शुरू करना और त्वरण करना
ईएमडीजी विद्युत आपूर्ति इकाई 10 से विद्युत चुंबक 2 के कुंडल 3 में विद्युत प्रवाह को लागू करके शुरू किया जाता है। रोटर के स्थायी चुंबक 4 के चुंबकीय ध्रुवों की प्रारंभिक स्थिति इलेक्ट्रोमैग्नेट 2 के अंतराल के लंबवत होती है। ध्रुवता इस मामले में विद्युत चुंबक के चुंबकीय ध्रुवों की संख्या इस तरह होती है कि रोटर 5 का स्थायी चुंबक 4 अपने चुंबकीय ध्रुवों द्वारा विद्युत चुंबक 2 के विपरीत चुंबकीय ध्रुव की ओर आकर्षित होने के कारण, चुंबकीय बलों द्वारा 16 घूर्णन की अपनी धुरी पर घूमना शुरू कर देता है। चुंबक 4 के विपरीत चुंबकीय ध्रुवों और इलेक्ट्रोमैग्नेट 2 के अंतराल में समाप्त होने के संयोग के इस क्षण में, कॉइल 3 में करंट चुंबकीय रीड रिले (या इस करंट का साइनसॉइड शून्य से होकर गुजरता है) के कमांड द्वारा बंद कर दिया जाता है और जड़ता से, विशाल रोटर अपने प्रक्षेपवक्र के इस मृत बिंदु को पीएम 4 के साथ एक साथ गुजरता है। उसके बाद, कॉइल 3 में करंट की दिशा बदल जाती है और इस वर्किंग गैप में इलेक्ट्रोमैग्नेट 2 के चुंबकीय ध्रुव चुंबकीय के समान हो जाते हैं। स्थायी चुंबक के ध्रुव 4. परिणामस्वरूप, चुंबकीय प्रतिकर्षण बल एक ही चुंबकीय ध्रुवों का - रोटर का एक स्थायी चुंबक 4 और रोटर को एक ही दिशा में रोटर के घूमने की दिशा में अभिनय करने वाला एक अतिरिक्त त्वरित क्षण प्राप्त होता है। पीएम रोटर के चुंबकीय ध्रुवों की स्थिति तक पहुंचने के बाद - जैसा कि यह घूमता है - चुंबकीय मेरिडियन के साथ, कॉइल 3 में फिर से दूसरे चुंबकीय स्थिति सेंसर 11, चुंबकीय ध्रुवों के उलट के आदेश पर वर्तमान की दिशा बदलें विद्युत चुम्बक 2 फिर से कार्य अंतराल में होता है और स्थायी चुंबक 4 फिर से विद्युत चुम्बक 2 के निकटतम विपरीत चुंबकीय ध्रुवों की ओर अपने अंतराल में घूर्णन की दिशा में आकर्षित होने लगता है। और फिर पीएम 4 और रोटर के त्वरण की प्रक्रिया - चक्रीय रूप से रोटर के पीएम के स्थिति सेंसर 11 से स्विच 7 के ट्रांजिस्टर 8 को चक्रीय रूप से कुंडल 3 में विद्युत प्रवाह को उलट कर चक्रीय रूप से दोहराया जाता है। और साथ ही, जैसे ही पीएम 4 और रोटर 5 में तेजी आती है, कॉइल 3 में विद्युत प्रवाह के उत्क्रमण की आवृत्ति स्वचालित रूप से बढ़ जाती है, इस इलेक्ट्रोमैकेनिकल सिस्टम में सर्किट के साथ कम्यूटेटर और पोजिशन सेंसर के माध्यम से सकारात्मक प्रतिक्रिया की उपस्थिति के कारण रोटर के पीएम 4।
ध्यान दें कि कॉइल 3 में विद्युत प्रवाह की दिशा (चित्र 1 में तीरों द्वारा दर्शाई गई है) स्विच 7 के ट्रांजिस्टर 8 के खुले होने के आधार पर बदलती है। ट्रांजिस्टर की स्विचिंग आवृत्ति को बदलकर, हम इलेक्ट्रोमैग्नेट के कॉइल 3 में प्रत्यावर्ती धारा की आवृत्ति को बदलते हैं और तदनुसार, रोटर 5 के पीएम 4 की रोटेशन गति को बदलते हैं।
निष्कर्ष: इस प्रकार, अपनी धुरी के चारों ओर एक पूर्ण क्रांति के लिए रोटर का स्थायी चुंबक विद्युत चुंबक के चुंबकीय ध्रुवों के साथ बल चुंबकीय संपर्क से लगभग एक यूनिडायरेक्शनल त्वरित क्षण का अनुभव करता है, जो इसे रोटेशन में सेट करता है और धीरे-धीरे इसे और विद्युत जनरेटर को तेज करता है। किसी दिए गए स्थिर गति रोटेशन के लिए एक सामान्य रोटेशन शाफ्ट पर।
रोटर PM . की स्थिति के आधार पर स्टेटर इलेक्ट्रोमैग्नेट EMDG की वाइंडिंग के विद्युत नियंत्रण की प्रत्यक्ष विधि
एक इलेक्ट्रोमैग्नेट 3 एमडी की वाइंडिंग को नियंत्रित करने की ऐसी विधि प्रदान करने के लिए एक अतिरिक्त नवाचार, आवश्यक आवृत्ति के प्रत्यावर्ती धारा के साथ और स्थिर अवस्था संचालन में एक प्रत्यावर्ती धारा जनरेटर के आउटपुट से सीधे चरण एक चुंबकीय मोटर की ऐसी प्रणाली में परिचय है - एक विद्युत जनरेटर - एक समानांतर गुंजयमान एल-सी सर्किट - सर्किट में दो अधिष्ठापन हैं - कुंडल 3 से और जनरेटर की स्टेटर वाइंडिंग और अतिरिक्त विद्युत क्षमता एक अतिरिक्त विद्युत संधारित्र 17 का परिचय जनरेटर के आउटपुट विद्युत सर्किट में 8 सुनिश्चित करने के लिए इसकी आत्म-उत्तेजना और बाद में विद्युत एल-सी अनुनाद, बिजली के नुकसान को कम करने के लिए और जनरेटर से सीधे वांछित वोल्टेज और वर्तमान चरण के साथ वर्तमान को वैकल्पिक करके अधिष्ठापन 3 के अत्यंत सरल नियंत्रण के लिए।
पूरी तरह से स्वायत्त मोड ("पेरपेटम मोबाइल") EMDG
यह बिल्कुल स्पष्ट है कि "सतत गति" मोड में इस उपकरण के संचालन को सुनिश्चित करने के लिए, रोटर के स्थायी चुम्बकों से मुक्त ऊर्जा प्राप्त करना आवश्यक है, जो आवश्यक ईएमडी शाफ्ट पर एक विद्युत जनरेटर की पीढ़ी के लिए पर्याप्त है। इस प्रणाली के पूरी तरह से स्वायत्त संचालन के लिए - बिजली। इसलिए, सबसे महत्वपूर्ण शर्त यह सुनिश्चित करना है कि इस एमडी के चुंबकीय रोटर के पास अपने शाफ्ट पर पर्याप्त मात्रा में बिजली पैदा करने के लिए पर्याप्त टोक़ है, जो इलेक्ट्रोमैग्नेट कॉइल को बिजली देने के लिए पर्याप्त से अधिक होगा, किसी दिए गए मूल्य के पेलोड और क्षतिपूर्ति रोटर पर पीएम के साथ ऐसे इलेक्ट्रोमैकेनिकल सिस्टम में विभिन्न अपरिहार्य नुकसान के लिए। पीएम 4 के ठीक होने के बाद और रोटर 5 नाममात्र क्रांतियों तक पहुंच जाता है, हम कॉइल 3 की बिजली आपूर्ति को सीधे इलेक्ट्रिक जनरेटर से या एक अतिरिक्त वोल्टेज कनवर्टर के माध्यम से स्विच करते हैं, और स्टार्टर पावर स्रोत या तो पूरी तरह से बंद हो जाता है या रिचार्जिंग मोड में डाल दिया जाता है। इस ईएमडी के शाफ्ट पर विद्युत जनरेटर से।
"PPERP मोबाइल" मोड में इस मोटर-जनरेटर के संचालन के लिए आवश्यक संरचनात्मक संयोजन और नियंत्रण एल्गोरिदम
"सतत गति" मोड में डीएम के संचालन के लिए यह महत्वपूर्ण शर्त तभी पूरी की जा सकती है जब कम से कम छह शर्तें एक साथ पूरी हों:
1. एमडी में आधुनिक मजबूत नाइओबियम स्थायी चुम्बकों का उपयोग, जो पीएम के न्यूनतम आयामों के साथ ऐसे रोटर का अधिकतम टॉर्क प्रदान करते हैं।
2. एमडी स्टेटर पर एक प्रभावी अल्ट्रा-लो-कॉस्ट एमडी इलेक्ट्रोमैग्नेट सर्किट का उपयोग इलेक्ट्रोमैग्नेट वाइंडिंग में अत्यधिक उच्च संख्या और इसके चुंबकीय सर्किट और वाइंडिंग के सही और कुशल डिजाइन के कारण होता है।
3. स्विच से इलेक्ट्रोमैग्नेट कॉइल की बिजली आपूर्ति के साथ एमडी को शुरू करने और तेज करने के लिए एक शुरुआती डिवाइस और बिजली के स्टार्टर स्रोत की आवश्यकता।
4. रोटर पीएम की स्थिति के आधार पर दिशा, परिमाण में विद्युत चुंबक घुमाव में विद्युत प्रवाह को नियंत्रित करने के लिए सही एल्गोरिदम।
5. विद्युत जनरेटर के विद्युत मापदंडों और विद्युत चुंबक की वाइंडिंग का समन्वय।
6. इलेक्ट्रोमैग्नेट वाइंडिंग के पावर सप्लाई सर्किट को स्विच करने के लिए सही एल्गोरिथम जब इलेक्ट्रोमैग्नेट वाइंडिंग के पावर सप्लाई सर्किट में इलेक्ट्रिक जनरेटर सर्किट को स्विच किया जाता है और बिजली के शुरुआती स्रोत, उदाहरण के लिए, एबी को डिस्चार्ज मोड से ट्रांसफर किया जाता है। इसके इलेक्ट्रिक रिचार्जिंग के मोड में।
ईएमडी रोटर पीएम की स्थिति के आधार पर इलेक्ट्रोमैग्नेट कॉइल में इलेक्ट्रिक करंट को स्विच करने के लिए एल्गोरिदम (चित्र 1)
आइए हम रोटर की एक क्रांति (छवि 3) के ईएमडी रोटर पर एक बार चुंबक की उपस्थिति में कॉइल में विद्युत प्रवाह को स्विच करने के लिए एल्गोरिदम पर विचार करें। इस ईएमडी (छवि 1 डिजाइन) के प्रभावी संचालन को सुनिश्चित करने के लिए। , रोटर स्थिति के संयुक्त आरेखों और घुमावदार 3 स्टेटर इलेक्ट्रोमैग्नेट 1 में वर्तमान प्रवाह की दिशा का उपयोग करना। इन आरेखों से निम्नानुसार है, इलेक्ट्रोमैग्नेट 1 ईएमडी को नियंत्रित करने के लिए सही एल्गोरिदम का सार यह है कि पीएम रोटर की एक पूर्ण क्रांति विद्युत चुम्बक के आगमनात्मक वाइंडिंग 3 में विद्युत धारा दो पूर्ण दोलन करती है .. दूसरे शब्दों में, विद्युत की आवृत्ति विद्युत चुम्बक 1 के वाइंडिंग 3 को इससे जुड़े इलेक्ट्रॉनिक स्विच के माध्यम से आपूर्ति की जाती है, नियंत्रित किया जाता है रोटर पीएम स्थिति सेंसर के आदेशों से, रोटर की गति के दोगुने के बराबर है, और इस विद्युत प्रवाह के चरण को रोटर पीएम स्थिति के साथ सख्ती से सिंक्रनाइज़ किया जाता है। ईएमडी. चूंकि स्विच घुमावदार 3 (वर्तमान रिवर्स) में वर्तमान की दिशा को बदलता है, पीएम के चुंबकीय भूमध्य रेखा पर सख्ती से होता है जब पीएम के चुंबकीय ध्रुव और चुंबकीय सर्किट के सिरों के चुंबकीय ध्रुव कार्य अंतराल में मेल खाते हैं इलेक्ट्रोमैग्नेट 1 का चुंबकीय सर्किट 2, फिर, रोटर के पीएम की एक पूर्ण क्रांति के लिए, यह लगातार यूनिडायरेक्शनल टॉर्क को तेज करने का अनुभव करता है, और चुंबकीय सर्किट के सिरों के विपरीत चुंबकीय ध्रुवों के आकर्षण से दो बार। इलेक्ट्रोमैग्नेट और रोटर के पीएम, और दो बार - उनके समान चुंबकीय ध्रुवों के प्रतिकर्षण के चुंबकीय बलों के कारण।
अंजीर। 4 रोटर पीएम की एक क्रांति के लिए स्टेटर इलेक्ट्रोमैग्नेट की वाइंडिंग में करंट को उलटने के लिए इलेक्ट्रॉनिक स्विच के संचालन का समय आरेख
Fig.5 EMDG रोटर के PM की एक क्रांति के लिए एक विद्युत चुंबक के अंतराल में चुंबकीय ध्रुवों के प्रत्यावर्तन का साइक्लोग्राम
इलेक्ट्रोमैग्नेट ईएमडी के एल्गोरिथ्म की व्याख्या के लिए:
3.4 - विद्युत चुंबक के चाप चुंबकीय सर्किट 2 के सिरों के चुंबकीय ध्रुव 1
घुमावदार 3 के साथ कॉइल को इलेक्ट्रोमैग्नेट 1 . के चुंबकीय सर्किट 2 पर रखा गया है
9. रोटर चुंबक