motor DC
Motor DC ditemukan sebelum jenis mesin lain yang mengubah energi listrik menjadi energi mekanik. Meskipun motor AC telah menjadi yang paling populer akhir-akhir ini, ada aplikasi di mana tidak ada alternatif selain motor DC.
Motor DC dan AC
Sejarah penemuan
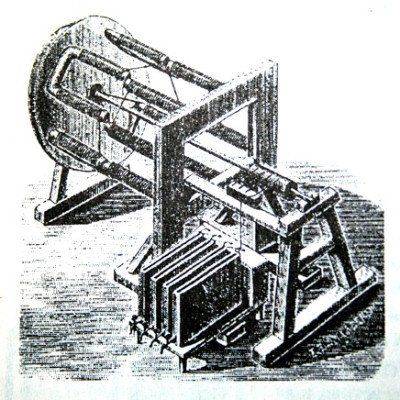
Motor listrik Jacobi.
Untuk memahami prinsip pengoperasian motor listrik DC (motor DC), kita beralih ke sejarah penciptaannya. Jadi, bukti eksperimental pertama bahwa energi listrik dapat diubah menjadi energi mekanik ditunjukkan oleh Michael Faraday. Pada tahun 1821, ia melakukan percobaan dengan konduktor yang diturunkan ke dalam bejana berisi merkuri, yang bagian bawahnya terdapat magnet permanen. Setelah menerapkan listrik ke konduktor, ia mulai berputar di sekitar magnet, menunjukkan reaksinya terhadap medan magnet yang ada di bejana. Eksperimen Faraday tidak menemukan aplikasi praktis, tetapi membuktikan kemungkinan menciptakan mesin listrik, dan memunculkan perkembangan elektromekanika.
Motor listrik DC pertama, yang didasarkan pada prinsip rotasi bagian yang bergerak (rotor), diciptakan oleh fisikawan mekanik Rusia Boris Semenovich Jacobi pada tahun 1834. Perangkat ini bekerja sebagai berikut:
Prinsip yang dijelaskan digunakan dalam mesin yang dipasang Jacobi di kapal dengan 12 penumpang pada tahun 1839. Kapal itu bergerak tersentak-sentak dengan kecepatan 3 km/jam melawan arus (menurut sumber lain - 4,5 km/jam), tetapi berhasil menyeberangi sungai dan mendaratkan penumpang di pantai. Baterai dengan 320 sel galvanik digunakan sebagai sumber listrik, dan pergerakannya dilakukan dengan menggunakan roda dayung.
Studi lebih lanjut tentang masalah ini mengarahkan para peneliti untuk menyelesaikan sejumlah pertanyaan mengenai sumber daya mana yang terbaik untuk digunakan, bagaimana meningkatkan kinerjanya dan mengoptimalkan dimensinya.
Pada tahun 1886, Frank Julian Sprague pertama kali merancang motor listrik arus searah, serupa dengan desain yang digunakan saat ini. Ini menerapkan prinsip eksitasi diri dan prinsip reversibilitas mesin listrik. Pada saat ini, semua mesin jenis ini telah beralih ke daya dari sumber yang lebih cocok - generator DC.
Rakitan pengumpul sikat menyediakan sambungan listrik sirkuit rotor dengan sirkuit yang terletak di bagian stasioner mesin
Perangkat dan prinsip operasi
Dalam DPT modern, prinsip interaksi konduktor bermuatan dengan medan magnet yang sama digunakan. Dengan peningkatan teknologi, perangkat hanya dilengkapi dengan beberapa elemen yang meningkatkan kinerja. Sebagai contoh, saat ini magnet permanen hanya digunakan pada motor berdaya rendah, karena pada mesin besar akan memakan terlalu banyak ruang.
Prinsip dasarnya
Prototipe awal mesin jenis ini terasa lebih sederhana daripada perangkat modern. Perangkat primitif mereka hanya mencakup sebuah stator dari dua magnet dan sebuah angker dengan belitan yang dialiri arus. Setelah mempelajari prinsip interaksi medan magnet, para perancang menentukan algoritma operasi mesin berikut:
- Catu daya menciptakan medan elektromagnetik pada belitan jangkar.
- Kutub medan elektromagnetik ditolak dari kutub yang sama dari medan magnet permanen.
- Armature, bersama dengan poros yang terpasang, berputar sesuai dengan medan tolak belitan.
Algoritma ini bekerja dengan sempurna dalam teori, tetapi dalam praktiknya, pencipta mesin pertama menghadapi masalah khusus yang mencegah pengoperasian mesin:
- Posisi mati dari mana mesin tidak dapat dihidupkan - ketika kutub benar-benar berorientasi di depan satu sama lain.
- Ketidakmampuan untuk memulai karena resistensi yang kuat atau tolakan yang lemah dari kutub.
- Rotor berhenti setelah satu putaran. Ini disebabkan oleh kenyataan bahwa setelah melewati setengah lingkaran, daya tarik magnet tidak mempercepat, tetapi memperlambat putaran rotor.
Solusi untuk masalah pertama ditemukan cukup cepat - untuk ini diusulkan untuk menggunakan lebih dari dua magnet. Kemudian, beberapa belitan dan rakitan sikat pengumpul dimasukkan ke dalam perangkat motor, yang memasok daya hanya ke satu pasang belitan pada titik waktu tertentu.
Sistem suplai arus kolektor-sikat juga memecahkan masalah pengereman rotor - pergantian polaritas terjadi hingga saat rotasi rotor mulai melambat. Ini berarti bahwa selama satu putaran motor setidaknya ada dua pembalikan polaritas.
Masalah arus masuk yang rendah dibahas di bawah ini dalam bagian terpisah.
Rancangan
Jadi, magnet permanen dipasang pada rumah motor, membentuk stator, di mana rotor berada. Setelah daya diterapkan pada belitan jangkar, medan elektromagnetik muncul yang berinteraksi dengan medan magnet stator, ini mengarah pada rotasi rotor, yang dipasang secara kaku pada poros. Untuk mentransfer arus listrik dari sumber ke angker, mesin dilengkapi dengan rakitan sikat kolektor, yang terdiri dari:
- Pengumpul. Ini adalah cincin pengumpul arus dari beberapa bagian yang dipisahkan oleh bahan dielektrik, terhubung ke belitan jangkar dan dipasang langsung pada poros motor.
- Kuas grafit. Mereka menutup sirkuit antara kolektor dan sumber daya menggunakan sikat yang ditekan pada bantalan kontak kolektor oleh pegas tekanan.
Gulungan jangkar dihubungkan di satu ujung satu sama lain, dan di ujung lainnya ke bagian kolektor, sehingga membentuk sirkuit di mana arus mengalir di sepanjang rute berikut: sikat input -> belitan rotor -> sikat keluaran.
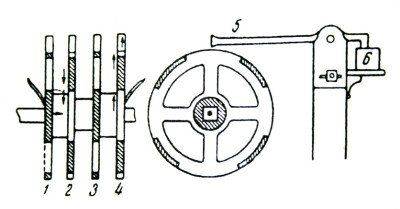
Diagram rangkaian yang diberikan (Gbr. 3) menunjukkan prinsip pengoperasian motor DC primitif dengan kolektor dua bagian:
- Dalam contoh ini, kita akan mempertimbangkan posisi awal rotor seperti yang ditunjukkan pada diagram. Jadi, setelah daya disuplai ke sikat bawah, ditandai dengan "+", arus mengalir melalui belitan dan menciptakan medan elektromagnetik di sekitarnya.
- Menurut aturan gimlet, kutub utara jangkar terbentuk di bagian kiri bawah, dan kutub selatan terbentuk di kanan atas. Terletak di dekat kutub stator dengan nama yang sama, mereka mulai menolak, sehingga membuat rotor bergerak, yang berlanjut hingga kutub yang berlawanan berada pada jarak minimum satu sama lain, yaitu, mereka mencapai posisi akhir (Gbr. 1).
- Desain kolektor pada tahap ini akan menghasilkan pembalikan polaritas pada belitan armature. Akibatnya, kutub-kutub medan magnet akan kembali berada pada jarak dekat dan mulai tolak-menolak.
- Rotor membuat putaran penuh, dan kolektor membalikkan polaritas lagi, melanjutkan gerakannya.
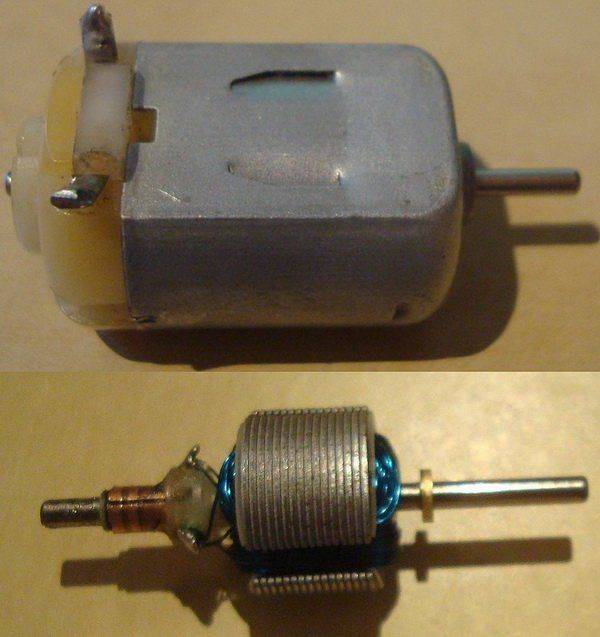
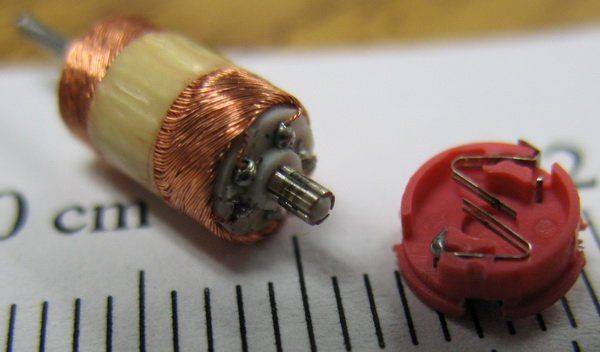
Suku Cadang Motor DC
Di sini, seperti yang telah dicatat, prinsip pengoperasian prototipe primitif ditunjukkan. Motor nyata menggunakan lebih dari dua magnet, dan komutator terdiri dari lebih banyak bantalan kontak, yang memastikan putaran yang mulus.
Pada motor berdaya tinggi, penggunaan magnet permanen tidak dimungkinkan karena ukurannya yang besar. Alternatif untuk mereka adalah sistem beberapa batang konduktif, yang masing-masing memiliki belitan sendiri yang terhubung ke busbar suplai. Kutub dengan nama yang sama termasuk dalam jaringan secara seri. Dari 1 hingga 4 pasang kutub dapat ada di tubuh, dan jumlahnya harus sesuai dengan jumlah sikat pengumpul arus pada kolektor.
Motor listrik yang dirancang untuk daya tinggi memiliki sejumlah keunggulan fungsional dibandingkan rekan-rekan mereka yang "lebih ringan". Misalnya, susunan lokal sikat pengumpul arus memutarnya pada sudut tertentu relatif terhadap poros untuk mengimbangi pengereman poros, yang disebut "reaksi jangkar".
Arus awal
Melengkapi rotor motor secara bertahap dengan elemen tambahan yang memastikan operasinya tidak terganggu dan mengecualikan pengereman sektoral, masalah start-upnya muncul. Tetapi semua ini meningkatkan berat rotor - dengan mempertimbangkan ketahanan poros, menjadi lebih sulit untuk mendorongnya dari tempatnya. Solusi pertama untuk masalah ini yang muncul di pikiran mungkin adalah meningkatkan arus yang disuplai di awal, tetapi ini dapat menyebabkan konsekuensi yang tidak menyenangkan:
- pemutus sirkuit saluran tidak akan menahan arus dan akan mati;
- kabel berliku akan terbakar karena kelebihan beban;
- sektor switching pada kolektor akan dilas dari overheating.
Oleh karena itu, keputusan seperti itu dapat disebut sebagai tindakan setengah-setengah yang berisiko.
Secara umum, masalah ini adalah kelemahan utama motor DC, tetapi termasuk keuntungan utama mereka, karena itu mereka sangat diperlukan di beberapa area. Keuntungan ini terletak pada transfer torsi langsung segera setelah start-up - poros (jika mulai bergerak) akan berputar dengan beban apa pun. Motor AC tidak mampu melakukan ini.
Sejauh ini, masalah ini belum sepenuhnya terpecahkan. Sampai saat ini, untuk menghidupkan mesin seperti itu, starter otomatis digunakan, yang prinsip operasinya mirip dengan gearbox mobil:
- Pertama, arus secara bertahap naik ke nilai awal.
- Setelah "pergeseran" dari tempat itu, nilai arus turun tajam dan kembali naik dengan lancar "menyesuaikan rotasi poros".
- Setelah naik ke nilai batas, kekuatan saat ini berkurang lagi dan "menyesuaikan".
Siklus ini diulang 3-5 kali (Gbr. 4) dan menyelesaikan kebutuhan untuk menghidupkan mesin tanpa terjadinya beban kritis dalam jaringan. Faktanya, masih belum ada start "lunak", tetapi peralatan bekerja dengan aman, dan keunggulan utama motor DC - torsi - dipertahankan.
Diagram pengkabelan
Menghubungkan motor DC agak lebih sulit dibandingkan dengan motor dengan spesifikasi AC.
Motor dengan daya tinggi dan sedang, biasanya, memiliki belitan medan (OB) khusus dan kontak jangkar yang ditempatkan di kotak terminal. Paling sering, tegangan keluaran sumber diterapkan ke angker, dan arus, sebagai aturan, disesuaikan dengan rheostat, diterapkan ke OB. Kecepatan putaran motor secara langsung tergantung pada kekuatan arus yang diberikan pada belitan eksitasi.
Ada tiga skema utama untuk menyalakan dinamo dan belitan eksitasi motor DC:
- Eksitasi berurutan digunakan pada motor yang membutuhkan arus besar di awal (kendaraan listrik, peralatan sewa, dll.). Skema ini menyediakan koneksi serial OF dan angker ke sumbernya. Setelah menerapkan tegangan, arus dengan besaran yang sama melewati belitan jangkar dan OB. Harus diingat bahwa mengurangi beban pada poros bahkan seperempat dengan eksitasi berurutan akan menyebabkan peningkatan kecepatan yang tajam, yang dapat menyebabkan kerusakan mesin, oleh karena itu sirkuit ini digunakan dalam kondisi beban konstan.
- Eksitasi paralel digunakan pada motor yang memastikan pengoperasian peralatan mesin, kipas, dan peralatan lain yang tidak memberikan beban tinggi pada poros pada saat start-up. Di sirkuit ini, belitan independen digunakan untuk membangkitkan OF, yang paling sering diatur oleh rheostat.
- Eksitasi independen sangat mirip dengan eksitasi paralel, tetapi dalam kasus ini, sumber independen digunakan untuk memasok daya ke OB, yang menghilangkan munculnya sambungan listrik antara angker dan belitan eksitasi.
Pada motor listrik DC modern, sirkuit campuran dapat digunakan berdasarkan tiga yang dijelaskan.
Penyesuaian kecepatan rotasi
Cara mengatur kecepatan DPT tergantung pada skema koneksinya:
- Pada motor dengan eksitasi paralel, penurunan kecepatan relatif terhadap nilai nominal dapat dilakukan dengan mengubah tegangan jangkar, dan peningkatan dengan melemahkan aliran eksitasi. Untuk meningkatkan kecepatan (tidak lebih dari 4 kali relatif terhadap nilai nominal), rheostat ditambahkan ke sirkuit OB.
- Dengan eksitasi serial, penyetelan mudah dilakukan oleh resistansi variabel dalam rangkaian jangkar. Benar, metode ini hanya cocok untuk mengurangi kecepatan dan hanya dalam rasio 1:3 atau 1:2 (selain itu, ini menyebabkan kerugian besar pada rheostat). Peningkatan dilakukan dengan menggunakan rheostat penyetel di sirkuit OB.
Sirkuit ini jarang digunakan dalam peralatan berteknologi tinggi modern, karena memiliki rentang penyesuaian yang sempit dan kelemahan lainnya. Saat ini, sirkuit kontrol elektronik semakin banyak dibuat untuk tujuan ini.
Membalikkan
Untuk membalikkan (membalikkan) putaran motor DC, Anda harus:
- dengan eksitasi serial - cukup ubah polaritas kontak input;
- dengan eksitasi campuran dan paralel - perlu untuk mengubah arah arus dalam belitan jangkar; pecahnya OF dapat menyebabkan peningkatan kritis dalam gaya gerak listrik yang disuntikkan dan kerusakan isolasi kawat.
Lingkup aplikasi
Seperti yang sudah Anda pahami, penggunaan motor DC disarankan dalam kondisi di mana koneksi permanen ke jaringan tidak memungkinkan. Contoh yang baik di sini adalah starter mobil yang mendorong mesin pembakaran internal "dari suatu tempat", atau mainan anak-anak dengan motor. Dalam kasus ini, baterai digunakan untuk menghidupkan mesin. Untuk keperluan industri, DPT digunakan di rolling mills.
Bidang utama penerapan DPT adalah transportasi listrik. Kapal uap, lokomotif listrik, trem, bus troli, dan sejenisnya memiliki hambatan awal yang sangat besar, yang hanya dapat diatasi dengan bantuan motor DC dengan karakteristik lunaknya dan batas pengaturan putaran yang lebar. Mengingat perkembangan pesat dan mempopulerkan teknologi transportasi lingkungan, ruang lingkup DPT hanya meningkat.

Rakitan pengumpul sikat paling sederhana
Keuntungan dan kerugian
Meringkas semua hal di atas, adalah mungkin untuk menggambarkan kelebihan dan kekurangan karakteristik motor DC relatif terhadap rekan-rekan mereka yang dirancang untuk beroperasi pada AC.
Keuntungan utama:
- DCT sangat diperlukan dalam situasi di mana torsi awal yang kuat diperlukan;
- kecepatan putaran jangkar mudah disesuaikan;
- Motor DC adalah mesin listrik universal, yaitu dapat digunakan sebagai generator.
Kerugian utama:
- DPT memiliki biaya produksi yang tinggi;
- penggunaan rakitan pengumpul sikat mengarah pada kebutuhan akan perawatan dan perbaikan yang sering;
- Membutuhkan catu daya DC atau penyearah untuk beroperasi.
Motor listrik DC, tentu saja, kalah dari rekan "variabel" mereka dalam hal biaya dan keandalan, namun, mereka digunakan dan akan digunakan, karena keuntungan penggunaannya di area tertentu secara kategoris mencoret semua kerugian.