motore a corrente continua
Il motore a corrente continua è stato inventato prima di altri tipi di macchine che convertono l'energia elettrica in energia meccanica. Sebbene i motori CA siano diventati i più popolari ultimamente, ci sono applicazioni in cui non ci sono alternative ai motori CC.
Motore a corrente continua e alternata
Storia dell'invenzione
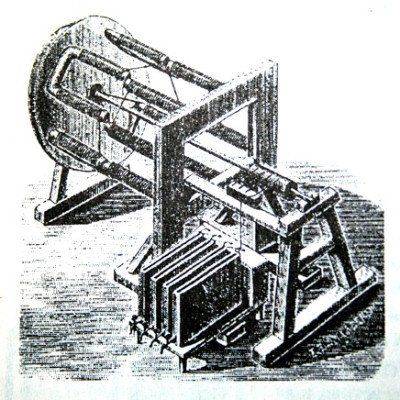
Motore elettrico Jacobi.
Per comprendere il principio di funzionamento dei motori elettrici a corrente continua (motori a corrente continua), ci rivolgiamo alla storia della sua creazione. Quindi, la prima prova sperimentale che l'energia elettrica può essere convertita in energia meccanica è stata dimostrata da Michael Faraday. Nel 1821 condusse un esperimento con un conduttore calato in un recipiente pieno di mercurio, sul fondo del quale c'era un magnete permanente. Dopo aver applicato l'elettricità al conduttore, ha iniziato a ruotare attorno al magnete, dimostrando la sua reazione al campo magnetico presente nel vaso. L'esperimento di Faraday non trovò applicazione pratica, ma dimostrò la possibilità di creare macchine elettriche e diede origine allo sviluppo dell'elettromeccanica.
Il primo motore elettrico a corrente continua, basato sul principio di rotazione della parte mobile (rotore), fu creato dal fisico meccanico russo Boris Semenovich Jacobi nel 1834. Questo dispositivo ha funzionato come segue:
Il principio descritto è stato utilizzato in un motore che Jacobi ha installato su una barca con 12 passeggeri nel 1839. La nave si muoveva a scatti a una velocità di 3 km/h contro corrente (secondo altre fonti - 4,5 km/h), ma ha attraversato con successo il fiume e ha fatto atterrare i passeggeri sulla riva. Come fonte di alimentazione è stata utilizzata una batteria con 320 celle galvaniche e il movimento è stato effettuato tramite ruote a pale.
Un ulteriore studio del problema ha portato i ricercatori a risolvere una serie di domande su quali fonti di alimentazione siano i migliori da utilizzare, come migliorarne le prestazioni e ottimizzarne le dimensioni.
Nel 1886 Frank Julian Sprague fu il primo a progettare un motore elettrico a corrente continua, simile nel design a quelli utilizzati oggi. Ha implementato il principio di autoeccitazione e il principio di reversibilità della macchina elettrica. A questo punto, tutti i motori di questo tipo sono stati alimentati da una fonte più adatta: un generatore CC.
Il gruppo spazzole-collettore provvede al collegamento elettrico del circuito del rotore con i circuiti posti nella parte stazionaria della macchina
Dispositivo e principio di funzionamento
Nei moderni DPT viene utilizzato lo stesso principio di interazione di un conduttore carico con un campo magnetico. Con il miglioramento della tecnologia, il dispositivo viene integrato solo con alcuni elementi che migliorano le prestazioni. Ad esempio, oggigiorno i magneti permanenti vengono utilizzati solo nei motori di bassa potenza, perché nelle macchine di grandi dimensioni occuperebbero troppo spazio.
Il principio di base
I prototipi iniziali di motori di questo tipo erano notevolmente più semplici dei dispositivi moderni. Il loro dispositivo primitivo includeva solo uno statore di due magneti e un'armatura con avvolgimenti a cui veniva applicata corrente. Dopo aver studiato il principio dell'interazione dei campi magnetici, i progettisti hanno determinato il seguente algoritmo di funzionamento del motore:
- L'alimentatore crea un campo elettromagnetico sugli avvolgimenti dell'indotto.
- I poli del campo elettromagnetico sono respinti dagli stessi poli del campo magnetico permanente.
- L'armatura, insieme all'albero su cui è fissata, ruota secondo il campo repulsivo dell'avvolgimento.
Questo algoritmo funzionava perfettamente in teoria, ma in pratica i creatori dei primi motori hanno dovuto affrontare problemi specifici che impedivano il funzionamento della macchina:
- Posizione morta dalla quale il motore non può essere avviato - quando i poli sono esattamente orientati uno di fronte all'altro.
- Impossibilità di partire per forte resistenza o debole repulsione dei poli.
- Il rotore si ferma dopo un giro. Ciò è dovuto al fatto che dopo aver superato metà del cerchio, l'attrazione del magnete non ha accelerato, ma ha rallentato la rotazione del rotore.
La soluzione al primo problema è stata trovata abbastanza rapidamente: per questo è stato proposto di utilizzare più di due magneti. Successivamente, diversi avvolgimenti e un gruppo collettore-spazzola furono inclusi nel dispositivo motore, che forniva alimentazione a solo una coppia di avvolgimenti in un determinato momento.
Il sistema di alimentazione della corrente a spazzola del collettore risolve anche il problema della frenatura del rotore: il cambio di polarità avviene fino al momento in cui la rotazione del rotore inizia a rallentare. Ciò significa che durante un giro del motore si verificano almeno due inversioni di polarità.
Il problema delle basse correnti di spunto è discusso di seguito in una sezione separata.
Disegno
Quindi, un magnete permanente è fissato sull'alloggiamento del motore, formando con esso uno statore, all'interno del quale si trova il rotore. Dopo che l'alimentazione è stata applicata all'avvolgimento dell'indotto, si forma un campo elettromagnetico che interagisce con il campo magnetico dello statore, questo porta alla rotazione del rotore, che è montato rigidamente sull'albero. Per trasferire la corrente elettrica dalla sorgente all'indotto, il motore è dotato di un gruppo collettore-spazzola, composto da:
- Collettore. È un anello di raccolta di corrente di più sezioni separate da un materiale dielettrico, collegato agli avvolgimenti dell'indotto e montato direttamente sull'albero del motore.
- Pennelli in grafite. Chiudono il circuito tra il collettore e la fonte di alimentazione mediante spazzole che vengono premute contro le piastre di contatto del collettore da molle a pressione.
Gli avvolgimenti dell'indotto sono collegati tra loro da un'estremità e dall'altra con le sezioni del collettore, formando così un circuito lungo il quale scorre la corrente lungo il seguente percorso: spazzola di ingresso -> avvolgimento del rotore -> spazzola di uscita.
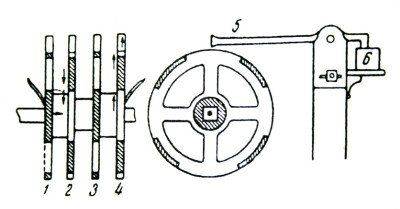
Lo schema elettrico fornito (Fig. 3) mostra il principio di funzionamento di un motore CC primitivo con un collettore di due sezioni:
- In questo esempio, considereremo la posizione iniziale del rotore come mostrato nel diagramma. Quindi, dopo che l'alimentazione è stata fornita alla spazzola inferiore, contrassegnata da un "+", la corrente scorre attraverso l'avvolgimento e crea un campo elettromagnetico attorno ad esso.
- Secondo la regola del succhiello, il polo nord dell'ancora è formato nella parte inferiore sinistra e il polo sud è formato in alto a destra. Trovandosi in prossimità dei poli dello statore omonimi, iniziano a respingersi, mettendo così in moto il rotore, che prosegue fino a quando i poli opposti non si trovano a una distanza minima l'uno dall'altro, cioè giungono alla posizione finale (Fig. 1).
- Il design del collettore in questa fase comporterà un'inversione di polarità sugli avvolgimenti dell'indotto. Di conseguenza, i poli dei campi magnetici saranno di nuovo a distanza ravvicinata e inizieranno a respingersi.
- Il rotore compie un giro completo e il collettore inverte nuovamente la polarità, continuando il suo movimento.
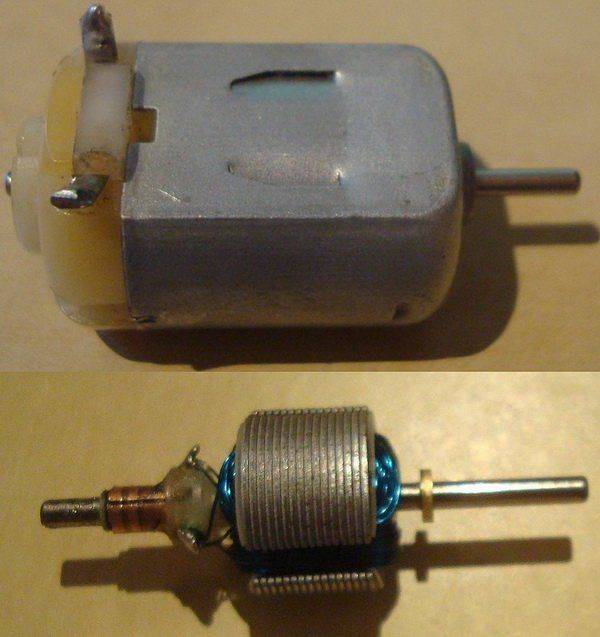
Parti del motore a corrente continua
Qui, come già notato, viene dimostrato il principio di funzionamento di un prototipo primitivo. I motori reali utilizzano più di due magneti e il commutatore è costituito da più cuscinetti di contatto, che garantiscono una rotazione regolare.
Nei motori ad alta potenza, l'uso di magneti permanenti non è possibile a causa delle loro grandi dimensioni. Un'alternativa per loro è un sistema di più barre conduttive, ognuna delle quali ha il proprio avvolgimento collegato alle sbarre di alimentazione. I poli con lo stesso nome sono inclusi nella rete in serie. Sul corpo possono essere presenti da 1 a 4 paia di poli, e il loro numero deve corrispondere al numero di spazzole captatrici presenti sul collettore.
I motori elettrici progettati per potenze elevate presentano una serie di vantaggi funzionali rispetto alle loro controparti "più leggere". Ad esempio, la disposizione locale delle spazzole di raccolta della corrente le fa ruotare di un certo angolo rispetto all'albero per compensare la frenatura dell'albero, chiamata "reazione dell'indotto".
Correnti di partenza
L'equipaggiamento graduale del rotore del motore con elementi aggiuntivi che ne garantiscono il funzionamento ininterrotto ed escludono la frenatura settoriale, si pone il problema del suo avviamento. Ma tutto ciò aumenta il peso del rotore: tenendo conto della resistenza dell'albero, diventa più difficile spingerlo dalla sua posizione. La prima soluzione a questo problema che viene in mente potrebbe essere quella di aumentare la corrente erogata in partenza, ma questo può portare a spiacevoli conseguenze:
- l'interruttore della linea non resisterà alla corrente e si spegnerà;
- i fili degli avvolgimenti si bruceranno per sovraccarico;
- i settori di commutazione sul collettore saranno saldati per surriscaldamento.
Pertanto, una tale decisione può essere definita piuttosto una mezza misura rischiosa.
In generale, questo problema è il principale svantaggio dei motori a corrente continua, ma include il loro principale vantaggio, grazie al quale sono indispensabili in alcune aree. Questo vantaggio risiede nel trasferimento diretto della coppia subito dopo l'avvio: l'albero (se inizia a muoversi) girerà con qualsiasi carico. I motori a corrente alternata non sono in grado di farlo.
Finora, questo problema non è stato completamente risolto. Ad oggi, per avviare tali motori viene utilizzato un dispositivo di avviamento automatico, il cui principio di funzionamento è simile a un cambio di automobile:
- Innanzitutto, la corrente sale gradualmente al valore iniziale.
- Dopo lo "spostamento" dal luogo, il valore attuale diminuisce bruscamente e di nuovo aumenta dolcemente "regolando la rotazione dell'albero".
- Dopo essere salito al valore limite, la forza attuale diminuisce di nuovo e si "regola".
Questo ciclo si ripete 3-5 volte (Fig. 4) e risolve la necessità di avviare il motore senza che si verifichino carichi critici nella rete. In effetti, non c'è ancora l'avvio "soft", ma l'attrezzatura funziona in sicurezza e viene preservato il principale vantaggio del motore a corrente continua - la coppia.
Schema elettrico
Il collegamento di un motore CC è un po' più difficile rispetto ai motori con una specifica CA.
I motori di alta e media potenza, di norma, hanno speciali avvolgimenti di campo (OB) e contatti di armatura posti nella morsettiera. Molto spesso, la tensione di uscita della sorgente viene applicata all'armatura e la corrente, di regola, regolata da un reostato, viene applicata all'OB. La velocità di rotazione del motore dipende direttamente dalla forza della corrente applicata all'avvolgimento di eccitazione.
Esistono tre schemi principali per l'accensione dell'indotto e dell'avvolgimento di eccitazione dei motori CC:
- L'eccitazione sequenziale viene utilizzata nei motori che richiedono una grande corrente all'avvio (veicoli elettrici, attrezzature a noleggio, ecc.). Questo schema prevede la connessione seriale dell'OF e dell'armatura alla sorgente. Dopo aver applicato la tensione, le correnti della stessa entità passano attraverso gli avvolgimenti dell'indotto e OB. Va tenuto presente che la riduzione del carico sull'albero anche di un quarto con eccitazione sequenziale comporterà un forte aumento della velocità, che può portare a guasto al motore, quindi questo circuito viene utilizzato in condizioni di carico costante.
- L'eccitazione parallela viene utilizzata nei motori che garantiscono il funzionamento di macchine utensili, ventilatori e altre apparecchiature che non esercitano un carico elevato sull'albero al momento dell'avviamento. In questo circuito, viene utilizzato un avvolgimento indipendente per eccitare l'OF, che è spesso regolato da un reostato.
- L'eccitazione indipendente è molto simile all'eccitazione parallela, ma in questo caso viene utilizzata una fonte indipendente per fornire alimentazione all'OB, che elimina la comparsa di un collegamento elettrico tra l'indotto e l'avvolgimento di eccitazione.
Nei moderni motori elettrici a corrente continua, i circuiti misti possono essere utilizzati in base ai tre descritti.
Regolazione della velocità di rotazione
Il modo per regolare la velocità del DPT dipende dallo schema della sua connessione:
- Nei motori con eccitazione parallela, è possibile ottenere una diminuzione della velocità rispetto al valore nominale modificando la tensione di armatura e un aumento indebolendo il flusso di eccitazione. Per aumentare la velocità (non più di 4 volte rispetto al valore nominale), al circuito OB viene aggiunto un reostato.
- Con l'eccitazione seriale, la regolazione viene effettuata facilmente da una resistenza variabile nel circuito dell'indotto. È vero, questo metodo è adatto solo per ridurre la velocità e solo in rapporti di 1:3 o 1:2 (inoltre, ciò porta a grandi perdite nel reostato). L'aumento viene effettuato utilizzando un reostato di regolazione nel circuito OB.
Questi circuiti sono usati raramente nelle moderne apparecchiature high-tech, poiché hanno un intervallo di regolazione ristretto e altri svantaggi. Al giorno d'oggi, i circuiti di controllo elettronici vengono creati sempre più per questi scopi.
Inversione
Per invertire (invertire) la rotazione di un motore a corrente continua, è necessario:
- con eccitazione seriale - basta cambiare la polarità dei contatti di ingresso;
- con eccitazione mista e parallela - è necessario cambiare la direzione della corrente nell'avvolgimento dell'indotto; la rottura dell'OF può portare a un aumento critico della forza elettromotrice iniettata e alla rottura dell'isolamento del filo.
Ambito di applicazione
Come avrete già capito, l'utilizzo di motori in corrente continua è consigliabile in condizioni in cui non è possibile una connessione permanente ininterrotta alla rete. Un buon esempio qui è un motorino di avviamento per auto che spinge un motore a combustione interna "da un luogo" o giocattoli per bambini con un motore. In questi casi, le batterie vengono utilizzate per avviare il motore. Per scopi industriali, i DPT sono utilizzati nei laminatoi.
Il principale campo di applicazione del DPT è il trasporto elettrico. Battelli a vapore, locomotive elettriche, tram, filobus e altri simili hanno una resistenza all'avviamento molto grande, che può essere superata solo con l'ausilio di motori a corrente continua con le loro caratteristiche morbide e gli ampi limiti di regolazione della rotazione. Dato il rapido sviluppo e la divulgazione delle tecnologie di trasporto ambientale, l'ambito del DPT è solo in aumento.

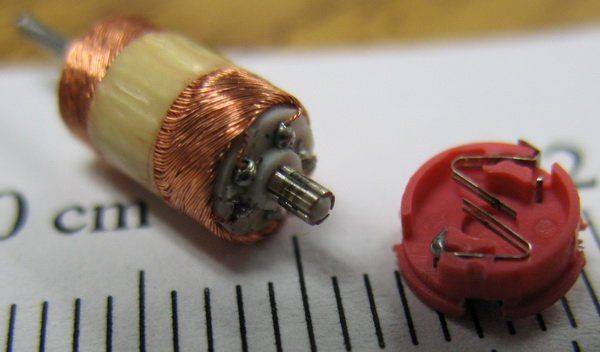
Il più semplice gruppo di raccolta spazzole
Vantaggi e svantaggi
Riassumendo tutto quanto sopra, è possibile descrivere i vantaggi e gli svantaggi caratteristici dei motori in corrente continua rispetto ai loro omologhi progettati per funzionare in corrente alternata.
Principali vantaggi:
- I DCT sono indispensabili nelle situazioni in cui è necessaria una forte coppia di spunto;
- la velocità di rotazione dell'indotto è facilmente regolabile;
- Il motore a corrente continua è una macchina elettrica universale, ovvero può essere utilizzata come generatore.
Principali svantaggi:
- I DPT hanno un alto costo di produzione;
- l'utilizzo di un gruppo spazzole-collettore comporta la necessità di frequenti manutenzioni e riparazioni;
- Richiede un alimentatore CC o raddrizzatori per funzionare.
I motori elettrici a corrente continua, ovviamente, perdono rispetto alle loro controparti "variabili" in termini di costi e affidabilità, tuttavia vengono utilizzati e verranno utilizzati, poiché i vantaggi del loro utilizzo in determinate aree annullano categoricamente tutti gli svantaggi.