DCモーター
DCモーターは、電気エネルギーを機械エネルギーに変換する他のタイプの機械よりも前に発明されました。 最近ではACモーターが最も普及していますが、DCモーターに代わるものがない用途もあります。
DCおよびACモーター
発明の歴史
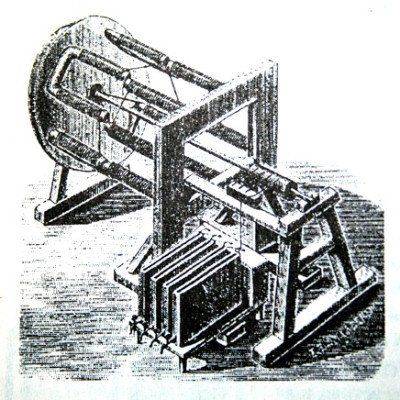
ヤコビ電気モーター。
DC電気モーター(DCモーター)の動作原理を理解するために、その作成の歴史に目を向けます。 したがって、電気エネルギーを機械エネルギーに変換できるという最初の実験的証拠は、マイケルファラデーによって実証されました。 1821年に、彼は水銀で満たされた容器に下げられた導体で実験を行いました。その底には永久磁石がありました。 導体に電気を加えた後、それは磁石の周りを回転し始め、容器内に存在する磁場への反応を示しました。 ファラデーの実験は実用化には至りませんでしたが、電気機械を作る可能性を証明し、電気機械の開発をもたらしました。
可動部分(ローター)の回転原理に基づいた最初のDC電気モーターは、1834年にロシアの機械物理学者BorisSemenovichJacobiによって作成されました。 このデバイスは次のように機能しました。
説明された原理は、1839年にヤコビが12人の乗客を乗せたボートに取り付けたエンジンで使用されました。 船は時速3kmの速度で(他の情報源によると4.5 km / h)ぎくしゃくして動いていましたが、川を渡り、乗客を岸に着陸させることに成功しました。 電源には320個のガルバニ電池を搭載した電池を使用し、外輪を使用して移動を行った。
この問題をさらに調査した結果、研究者は、どの電源を使用するのが最適か、パフォーマンスを改善し、寸法を最適化する方法に関する多くの質問を解決することになりました。
1886年、フランク・ジュリアン・スプレーグは、現在使用されているものと同様の設計の直流電気モーターを最初に設計しました。 それは、電気機械の自己励起の原理と可逆性の原理を実装しました。 この時までに、このタイプのすべてのエンジンは、より適切な電源(DC発電機)からの電力に切り替わりました。
ブラシコレクターアセンブリは、ローター回路と機械の静止部分にある回路との電気的接続を提供します
デバイスと動作原理
最新のDPTでは、帯電した導体と磁場との相互作用の同じ原理が使用されます。 技術の進歩により、デバイスはパフォーマンスを改善するいくつかの要素でのみ補完されます。 たとえば、現在、永久磁石は低出力モーターでのみ使用されています。これは、大型の機械ではスペースを取りすぎるためです。
基本原則
このタイプのエンジンの初期のプロトタイプは、最新のデバイスよりも著しく単純でした。 彼らの原始的な装置には、2つの磁石の固定子と電流が印加された巻線を備えた電機子のみが含まれていました。 磁場の相互作用の原理を研究した後、設計者は次のエンジン操作アルゴリズムを決定しました。
- 電源は、電機子巻線に電磁界を生成します。
- 電磁界の極は、永久磁石の同じ極からはじかれます。
- アーマチュアは、それが取り付けられているシャフトとともに、巻線の反発場に従って回転します。
このアルゴリズムは理論的には完全に機能しましたが、実際には、最初のエンジンの作成者は、マシンの操作を妨げる特定の問題に直面していました。
- エンジンを始動できないデッドポジション-ポールが正確に互いに正面を向いている場合。
- 極の強い抵抗または弱い反発のために始動できない。
- ローターは1回転後に停止します。 これは、円の半分を通過した後、磁石の引力が加速せず、ローターの回転が遅くなったためです。
最初の問題の解決策はすぐに見つかりました。このため、3つ以上の磁石を使用することが提案されました。 その後、いくつかの巻線とコレクターブラシアセンブリがモーターデバイスに組み込まれ、特定の時点で1対の巻線にのみ電力が供給されました。
コレクターブラシ電流供給システムは、ローターブレーキの問題も解決します。極性の切り替えは、ローターの回転が遅くなり始める瞬間まで発生します。 これは、モーターの1回転中に、少なくとも2つの極性反転があることを意味します。
低突入電流の問題については、以下の別のセクションで説明します。
デザイン
そのため、永久磁石がモーターハウジングに固定され、固定子を形成し、その内部に回転子が配置されます。 電機子巻線に電力が供給されると、固定子の磁界と相互作用する電磁界が発生します。これにより、シャフトにしっかりと取り付けられた回転子が回転します。 電流をソースからアーマチュアに転送するために、エンジンには次のもので構成されるコレクターブラシアセンブリが装備されています。
- コレクタ。 これは、誘電体によって分離され、電機子巻線に接続され、モーターシャフトに直接取り付けられたいくつかのセクションの集電流リングです。
- グラファイトブラシ。 それらは、圧力ばねによってコレクターの接触パッドに押し付けられるブラシを使用して、コレクターと電源の間の回路を閉じます。
電機子巻線は、一端が互いに接続され、他端がコレクタセクションに接続されているため、電流が次のルートに沿って流れる回路を形成します:入力ブラシ->回転子巻線->出力ブラシ。
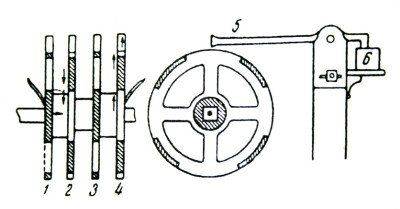
与えられた回路図(図3)は、2つのセクションのコレクターを備えたプリミティブDCモーターの動作原理を示しています。
- この例では、図に示すようにローターの開始位置を考慮します。 したがって、「+」でマークされた下部ブラシに電力が供給された後、電流が巻線を流れ、巻線の周囲に電磁界を生成します。
- ギムレットの法則によれば、錨の北極は左下に、南極は右上に形成されています。 同じ名前の固定子極の近くに配置されると、それらは反発し始め、それによって回転子を動かします。これは、反対の極が互いに最小距離になるまで、つまり最終位置に到達するまで続きます(図。 1)。
- この段階でのコレクタの設計により、電機子巻線の極性が反転します。 この結果、磁場の極は再び近距離になり、反発し始めます。
- ローターが完全に回転し、コレクターが再び極性を反転させ、動きを続けます。
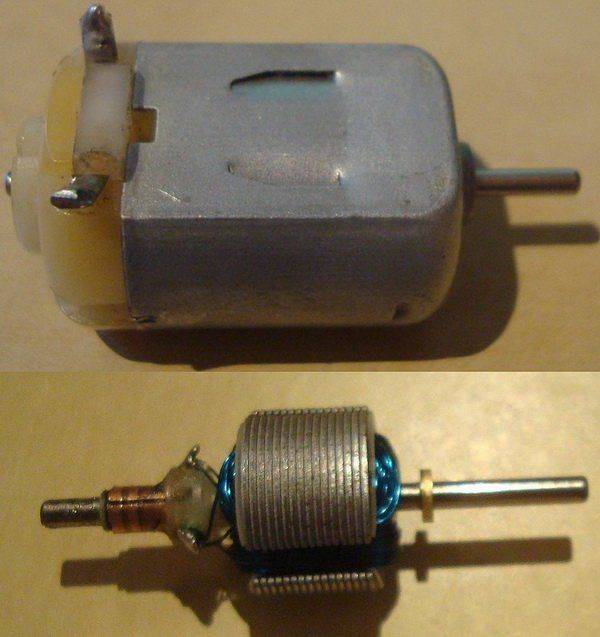
DCモーター部品
ここでは、すでに述べたように、プリミティブプロトタイプの動作原理が示されています。 実際のモーターは3つ以上の磁石を使用し、整流子はより多くの接触パッドで構成されているため、スムーズな回転が保証されます。
高出力モーターでは、永久磁石はサイズが大きいため使用できません。 それらの代替手段は、いくつかの導電性ロッドのシステムであり、それぞれが供給バスバーに接続された独自の巻線を持っています。 同じ名前の極が直列にネットワークに含まれています。 本体には1〜4対の極が存在する可能性があり、それらの数はコレクターの電流収集ブラシの数に対応している必要があります。
高出力用に設計された電気モーターには、「軽量」のモーターに比べて多くの機能上の利点があります。 たとえば、集電ブラシの局所的な配置は、「電機子反作用」と呼ばれるシャフトのブレーキングを補償するために、シャフトに対して特定の角度でそれらを回転させます。
開始電流
モーターローターに、中断のない動作を保証し、セクターブレーキを排除する追加の要素を徐々に装備すると、始動の問題が発生します。 しかし、これはすべてローターの重量を増加させます-シャフトの抵抗を考慮に入れると、その場所からそれを押すことはより困難になります。 頭に浮かぶこの問題の最初の解決策は、最初に供給される電流を増やすことかもしれませんが、これは不快な結果につながる可能性があります。
- ラインの回路ブレーカーは電流に耐えられず、オフになります。
- 巻線は過負荷により燃え尽きます。
- コレクターのスイッチングセクターは過熱により溶接されます。
したがって、そのような決定は、かなり危険な中途半端な措置と呼ぶことができます。
一般に、この問題はDCモーターの主な欠点ですが、一部の領域で不可欠であるため、主な利点も含まれています。 この利点は、始動直後のトルクの直接伝達にあります。シャフト(シャフトが動き始めた場合)は、どのような負荷でも回転します。 ACモーターはこれに対応していません。
これまでのところ、この問題は完全には解決されていません。 現在まで、このようなエンジンを始動するには、自動スターターが使用されており、その動作原理は自動車のギアボックスに似ています。
- まず、電流が徐々に開始値まで上昇します。
- その場所から「シフト」した後、電流値は急激に低下し、「シャフトの回転を調整する」と再びスムーズに上昇します。
- 限界値まで上昇した後、電流強度は再び減少し、「調整」されます。
このサイクルは3〜5回繰り返され(図4)、ネットワークに重大な負荷が発生することなくエンジンを始動する必要性を解決します。 実際、まだ「ソフト」スタートはありませんが、機器は安全に動作し、DCモーターの主な利点であるトルクは維持されます。
配線図
DCモーターの接続は、AC仕様のモーターよりもやや困難です。
高出力および中出力のモーターは、原則として、端子ボックスに配置された特殊な界磁巻線(OB)および電機子接点を備えています。 ほとんどの場合、ソースの出力電圧は電機子に印加され、電流は、原則として、レオスタットによって調整されて、OBに印加されます。 モーターの回転速度は、励起巻線に流れる電流の強さに直接依存します。
DCモーターの電機子と励起巻線をオンにするための3つの主要なスキームがあります。
- 直列励起は、始動時に大電流を必要とするモーター(電気自動車、レンタル機器など)で使用されます。 このスキームは、OFおよびアーマチュアのソースへのシリアル接続を提供します。 電圧を印加した後、同じ大きさの電流が電機子巻線とOBを通過します。連続励起でシャフトの負荷を4分の1でも減らすと、速度が急激に上昇し、結果として生じる可能性があることに注意してください。エンジンが故障するため、この回路は定負荷の条件下で使用されます。
- 並列励起は、始動時にシャフトに大きな負荷をかけない工作機械、ファン、およびその他の機器の動作を保証するモーターで使用されます。 この回路では、独立した巻線を使用してOFを励起します。これは、ほとんどの場合、レオスタットによって制御されます。
- 独立した励起は並列励起と非常に似ていますが、この場合、独立した電源を使用してOBに電力を供給します。これにより、電機子と励起巻線の間の電気的接続がなくなります。
最新のDC電気モーターでは、説明した3つに基づいて混合回路を使用できます。
回転速度調整
DPTの速度を調整する方法は、その接続のスキームによって異なります。
- 並列励起のモーターでは、電機子電圧を変更することで公称値に対する速度を下げ、励起の流れを弱めることで速度を上げることができます。 速度を上げるために(公称値の4倍以下)、レオスタットがOB回路に追加されます。
- 直列励起では、電機子回路の可変抵抗によって調整を簡単に実行できます。 確かに、この方法は速度を下げるのにのみ適しており、1:3または1:2の比率でのみ適しています(さらに、これはレオスタットの大きな損失につながります)。 増加は、OB回路の調整レオスタットを使用して実行されます。
これらの回路は、調整範囲が狭く、その他の欠点があるため、最新のハイテク機器で使用されることはめったにありません。 今日、これらの目的のために電子制御回路がますます作成されています。
逆転
DCモーターの回転を逆にする(逆にする)には、次のことを行う必要があります。
- シリアル励起の場合-入力接点の極性を変更するだけです。
- 混合および並列励起の場合-電機子巻線の電流の方向を変更する必要があります。 OFの破裂は、注入された起電力の重大な増加とワイヤ絶縁の破壊につながる可能性があります。
適用範囲
すでに理解しているように、ネットワークへの永続的な中断のない接続が不可能な状況では、DCモーターの使用をお勧めします。 ここでの良い例は、内燃エンジンを「ある場所から」押す車のスターター、またはモーターを備えた子供のおもちゃです。 これらの場合、バッテリーはエンジンを始動するために使用されます。 産業目的では、DPTは圧延機で使用されます。
DPTの主な用途は電気輸送です。 蒸気船、電気機関車、路面電車、トロリーバス、およびその他の同様のものは、非常に大きな始動抵抗を持っています。これは、そのソフトな特性と回転制御の広い制限を備えたDCモーターの助けを借りてのみ克服できます。 環境輸送技術の急速な発展と普及を考えると、DPTの範囲は拡大しているだけです。

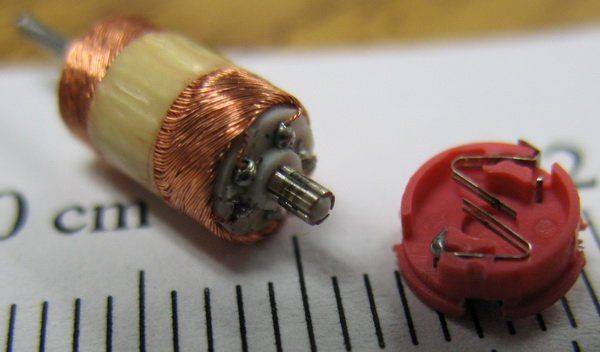
最も単純なブラシコレクターアセンブリ
長所と短所
上記のすべてを要約すると、ACで動作するように設計された対応するものと比較してDCモーターに特徴的な長所と短所を説明することができます。
主な利点:
- DCTは、強力な始動トルクが必要な状況では不可欠です。
- アーマチュアの回転速度は簡単に調整できます。
- DCモーターは万能電気機械です。つまり、発電機として使用できます。
主な欠点:
- DPTの製造コストは高くなります。
- ブラシコレクターアセンブリを使用すると、頻繁なメンテナンスと修理が必要になります。
- 動作するには、DC電源または整流器が必要です。
もちろん、DC電気モーターは、コストと信頼性の点で「可変」のモーターに負けますが、特定の領域での使用の利点がすべての欠点を明確に打ち消すため、使用され、使用されます。