永久電磁モータージェネレーター
この記事は、固定子に電磁石があり、永久磁石(PM)が1つしかない、新しいタイプのシンプルなオリジナルの「永久」電磁モータージェネレーターの動作原理、設計、および電気回路の開発と説明に専念しています。この電磁石の作業ギャップでこのPMが回転するローター。
固定子に電磁石、回転子に磁石を備えたパーペチュアル電磁石モータージェネレーター
1.はじめに
2.永久磁石にはどのくらいのエネルギーが隠されており、どこから来ていますか?
3.PMを備えた電磁モーターと発電機の簡単なレビュー
4.交流電磁石を備えた最新の電磁モーター発電機の設計と電気の説明
5.ローターに外部PMを備えたリバーシブル電磁モーター
6.「永久的な」電磁モーター発電機の仕事の説明
7.この電磁モータージェネレーターを「永久運動」モードで動作させるために必要なノードと制御アルゴリズム
8.磁気の位置に応じた電磁石巻線の逆電流のアルゴリズム
9.EMDGの要素と機器の選択と計算
10.低コストの電磁石EMD(設計と計算の基本)
11.EMDローターの永久磁石の正しい選択
12.EMDGのプロトタイピング用の発電機の選択
13.パーペチュアルシャッター電磁モータージェネレーター
14.従来の誘導電気メーターの永久電磁モーター
15.新しいEMDHと類似体のエネルギー性能の比較
16.結論
前書き
何世紀にもわたって永久機関を作成するという問題は、世界中の多くの発明者や科学者の心を刺激し、今でも関係があります。
文明のエネルギー需要が増大し、有機非再生可能燃料の差し迫った枯渇に関連して、そして特に文明の世界的なエネルギーと環境の危機。 もちろん、未来の社会を構築する上で、私たちのニーズを満たすことができる新しいエネルギー源を開発することは重要です。 そして今日、ロシアや他の多くの国にとって、それは単に不可欠です。 将来の復興と今後のエネルギー危機においては、画期的な技術に基づく新たなエネルギー源が絶対に必要となるでしょう。
多くの才能のある発明家、エンジニア、科学者の目は、永久磁石(PM)とその神秘的で驚くべきエネルギーに長い間釘付けにされてきました。 さらに、PMに対するこの関心は、強力なPMの作成が大幅に進歩したこと、および磁気モーター(MF)の提案された設計が単純であることもあり、近年さらに高まっています。
永久磁石にはどのくらいのエネルギーが隠されていますか?それはどこから来ていますか?
最新のコンパクトで強力なPMには、磁場のかなりの潜在エネルギーが含まれていることは明らかです。 そして、そのような磁気モーターと発電機の発明者と開発者の目標は、PMのこの潜在エネルギーを分離して他のタイプのエネルギー、たとえば、磁気ローターの連続回転の機械的エネルギーまたは電気に変換することです。 燃焼中の石炭は1グラムあたり33Jを放出し、石油は10〜15年で我が国で終わりを迎え始め、1グラムあたり44 Jを放出し、1グラムのウランは430億Jのエネルギーを供給します。 永久磁石には、理論上170億ジュールのエネルギーが含まれています。 1グラム。 もちろん、従来のエネルギー源と同様に、磁石の効率は100%にはなりません。さらに、フェライト磁石は、強い物理的、温度、および磁気的負荷にさらされない限り、約70年の寿命があります。 、彼のエネルギーにはそのような量のエネルギーが含まれているので、それはそれほど重要ではありません。 また、フェライト製の10倍の強度を持ち、より効率の良い希土類金属製の連続工業用磁石がすでにあります。 強度を失った磁石は、強い磁場で簡単に「再充電」することができます。 しかし、「PMのどこからこんなに多くのエネルギーが生まれるのか」という疑問は、科学では未解決のままです。 多くの科学者は、PMのエネルギーは継続的にエーテル(物理的真空)から外部から来ると信じています。 そして他の研究者は、PMの磁化された材料のためにそれ自体が単に発生すると主張しています。 これまでのところ明確さはありません。
既知の電磁モーターと発電機の簡単なレビュー
世界には、磁気モーターのさまざまな設計に関する多くの特許とエンジニアリングソリューションがすでに存在しますが、デモンストレーションでは、「永久運動」モードで動作するMDはまだ実際にはありません。 そしてこれまでのところ、「パーペチュアル」産業用磁気モーター(IM)はシリーズで作成および習得されておらず、実際に導入されていません。さらに、それらはまだ公開されていません。 残念ながら、Perendev(ドイツ)のシリアル磁気モータージェネレーターとAkoil-energyに関するインターネット上のよく知られた情報は、実際にはまだ確認されていません。 MDにおける金属の実際の進歩が遅い理由はたくさん考えられますが、明らかに2つの主な理由があります。これらの開発の分類のため、大量生産されていないため、またはパイロット産業サンプルのエネルギー性能が低いためです。 MDの。 機械的補償器と磁気スクリーンを備えた純粋な磁気モーター、たとえばカーテンタイプのMDを作成する際のいくつかの問題は、科学技術によってまだ完全には解決されていないことに注意する必要があります。
いくつかの既知のMDの分類と簡単な分析
- 磁気機械式磁気モーターDudyshev/1-3/。 それらの建設的な改良により、それらは「永久運動」モードでうまく機能する可能性があります。
- エンジンMDカリニナ-回転磁気スクリーンを備えた動作不能な往復MD-スプリング補償器が正しい設計ソリューションにもたらされなかったためにMD。
- 電磁モーター「Perendev」-ローターと補償器にPMを備えた従来の電磁モーターは、PMでローターを保持するデッドポイントが通過する領域で転流プロセスなしでは動作しません。 2種類の切り替えが可能です(ローターのPMの「保持点」を通過できるようにする-機械的および電磁的。最初の切り替えは、問題を自動的にループバージョンのSMOT'aに減らします(そして回転速度を制限し、したがって、出力)、2番目は低くなります。「永久エンジン」では動作できません。
- 湊電磁モーター-PMローターと「保持ポイント」(湊によると「崩壊ポイント」)の磁気ローターの通過を保証する電磁補償器を備えた電磁モーターの典型的な例。 原則として、これは効率が向上した単なる動作中の電磁モーターです。 達成可能な最大効率は、「パーペチュアル」MDモードでは約100%動作不能です。
- ジョンソンモーター-補償器を備えたPerendev電磁モーターの類似物ですが、エネルギーはさらに低くなっています。
- Shkondin磁気モーター発電機-PMを備えた電磁モーター。PMの磁気反発力で動作します(補償器なし)。 それは構造的に複雑で、コレクターブラシアセンブリを持っています、その効率は 約70-80%。 エターナルMDモードでは動作しません。
- アダムス電磁モータージェネレーター-これは実際、知られているすべての中で最も進んだものです-電磁石の端からのPMの磁気反発力にのみ作用する、Shkondinのモーターホイールのように機能する電磁モータージェネレーター。 しかし、このPMベースのモータージェネレーターは、Shkondinの磁気モータージェネレーターよりも構造的にはるかに単純です。 原則として、その効率は100%に近づくことしかできませんが、電磁石の巻線が充電されたコンデンサからの短い高強度パルスによって切り替えられる場合に限ります。 「永遠の」MDモードでは動作しません。
- Dudyshev電磁モーター。 外部磁気ローターと中央ステーター電磁石を備えたリバーシブル電磁モーター)。 磁気回路/3/の開放性により、その効率は100%以下です。 このEMDは動作テスト済みです(レイアウトの写真が利用可能です)。
他のEMDも知られていますが、それらはほぼ同じ動作原理を持っています。 しかし、それにもかかわらず、世界の磁気モーターの理論と実践の発展はまだ徐々に進んでいます。 そして、特にMDの具体的な実際の進歩は、高効率の永久磁石を使用した低コストの複合磁気電磁モーターで正確に概説されています。 世界のコミュニティにとってこのように重要なこれらの最も近い類似物-永久磁気モーターのプロトタイプは呼ばれます-固定子または回転子に電磁石と永久磁石を備えた電磁モータージェネレーター(EMDG)。 さらに、それらはすでに実際に存在し、絶えず改良されており、それらのいくつかでさえすでに大量生産されています。 かなりの数のメッセージがインターネットに登場し、写真付きのデザインや実験的研究に関する記事が掲載されました。 たとえば、効果的で、すでに金属でテストされている、比較的低コストのAdams電磁モータージェネレーター/1/が知られています。 さらに、組み合わせたEMDGの最も単純な設計のいくつかは、すでに連続生産と大量生産に到達しています。 これらは、たとえば、電動自転車で使用されるShkondinのシリアル電磁モーターホイールです。
ただし、すべての既知のEMDGの設計と電力工学は依然として非常に非効率的であり、「永久運動」モードで動作することはできません。 外部電源なし。
それにもかかわらず、既知のEMDGの建設的かつ根本的なエネルギー改善のための方法があります。 そして、外部ソースからの電力を消費することなく、この困難なタスク(「永続的な」電磁モータージェネレーターのモードでの完全に自律的な動作)に対処できるのは、まさにこのようなよりエネルギー的に高度なオプションであり、この記事で検討します。
この記事は、固定子にアーク電磁石があり、回転子に永久磁石(PM)が1つしかない、新しいタイプの単純な電磁モータージェネレーターの元の設計の動作原理の開発と説明に専念しています。電磁石のギャップでのこのPMの極回転。これは、「永久運動発生器」モードで非常に機能します。
以前および部分的に、異なるリバーシブルバージョンでのこのような珍しい極性EMDのこの設計は、記事の著者の既存のモックアップですでにテストされており、操作性とかなり高いエネルギー性能を示しています。
近代化されたEMDGの設計と電気回路の説明
図1ローターにPM、ステーターに外部交流電磁石、磁気ローターシャフトに発電機を備えた電磁モータージェネレーター
このタイプの電磁モータージェネレーター(EMG)とその電気部品の簡略化された設計を図1に示します。 1.これは、3つの主要ユニットで構成されています。DMから直接、固定子に電磁石、回転子にPMがあり、DMと同じシャフトに電気機械式発電機があります。 MDデバイスは、切り欠きのある環状セグメント上またはこの電磁石の誘導コイル3を備えたアーク磁気回路2上に作製されたステータ静的電磁石1と、それに取り付けられたコイル3内の電流反転用の電子スイッチとからなる。この電磁石1の作業ギャップ内のローター5にしっかりと配置された永久磁石(PM)4。EMDのローター5の回転シャフトは、カップリングによって発電機8のシャフト7に接続されます。最も単純なレギュレーター-電子スイッチ6(自律型インバーター)を使用して、単純なブリッジ半制御自律型インバーターのスキームに従って作成され、誘導巻線3電磁石2への出力に電気的に接続され、電源入力を介して-自律電源10。さらに、電磁石1の可逆誘導巻線3は、このスイッチ6の交流対角線に含まれ、DC回路を介して、このスイッチ6は、例えば、バッファDC源10に接続されている。 電気機械発電機8の電気出力は、誘導コイル3の巻線に直接接続されるか、または中間電子整流器(図示せず)を介してバッファDC源(ABタイプ)7に接続される。
ブリッジの最も単純な電子スイッチ(自律インバーター)は4つの半導体バルブで作られ、2つのパワートランジスタ9と、ブリッジのアームに一方向導通(ダイオード)10の2つの制御不可能な非接触キーが含まれています。 PM磁石のは、ローター6のこのMD 5の電磁ステーター1上に、その運動15の軌道の近くに配置され、ローターのPM磁石5の位置センサーとして、磁気の単純な接触センサーも配置される。電界強度-リードスイッチが使用されます。 回転子5の磁石4のこれらの位置センサー11は直角に配置されます-1つのセンサーは極のあるソレノイドの端の近くに配置され、2番目のセンサーはPM5の回転経路の近くで90度シフトされます(リードスイッチ)。回転子6。回転子のこれらの位置センサー11 PM 5の出力はリードスイッチであり、リレーは増幅論理装置12を介してトランジスタ9の制御入力に接続されている。有用な電気負荷13は、の出力巻線に接続されている。スイッチ(図示せず)を介して発電機8。DC始動ユニットから発電機8(図示せず)からの全電力供給に切り替える。
アナログと比較したこのようなMDの主な設計上の特徴に注意してください。
1.マルチターンの経済的な低アンペアアーク電磁石が使用されます。
2.回転子5の永久磁石4は、正確にはPM 5の引力と斥力の磁力によって、アーク電磁石1のギャップ内で回転します。この電磁石は、位置センサーの電磁石1コマンドのコイル3の電流方向がローター5の磁石4の午後11時の場合です。また、ローター5を非磁性材料で大きくして、イナーティオイドフライホイールの便利な機能。
ローターに外部PMを備えたリバーシブル電磁モーター
原則として、EMD設計の可逆バージョンも可能であり、リムに永久磁石PMを備えたローターが電磁石の外側に配置されます。 以前は、リバーシブルEMDのこのようなバリアントは、記事の作成者によって開発され、作成され、作業で正常にテストされました。1986年にさかのぼります。以下の図2、3には、以前にテストされたこのような簡略化された設計もあります。 EMDG、著者の記事/ 2-3 /
回転子に外部永久磁石があり、EMD固定子電磁石が取り外された最も単純なEMDのレイアウトの設計(不完全)を写真に示します(図3)。 実際には、電磁石は、このEMDの回転シャフトが取り付けられているトップカバー付きの円筒形誘電体非磁性透明シリンダーの中央に定期的に配置されます。 スイッチやその他の電気製品は写真には示されていません。
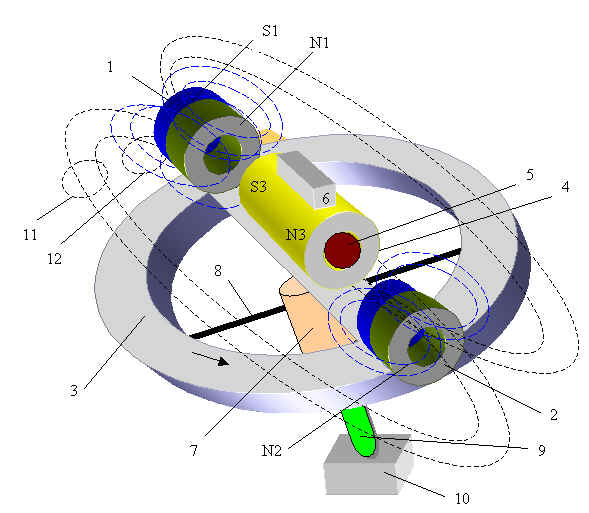
図2外部MP磁気ローターを備えたリバーシブルEMDG(不完全な設計)
指定:
1.永久磁石(PM1)
2.永久磁石(PM2)
3. EMD環状ローター(PM1.2はローターにしっかりと配置されています)
4.固定子電磁石の巻線(独立懸架)
5.ソレノイド磁気回路
6.PMローター位置センサー
7.ローターシャフト(非磁気ベアリング)
8.環状ローターとそのシャフトの機械的接続スポーク
9.サポートシャフト
10.サポート
11.電磁石の電力磁力線
12.永久磁石の磁力線矢印はローター3の回転方向を示しています

図3最も単純なEMDGレイアウトの写真(電磁石を取り外した状態)
「永久」電磁モータージェネレーターの動作の説明(図1)
デバイス(この永久電磁モーター)ジェネレーター(図1)は次のように動作します。
磁気ローターEMDGの始動と一定速度への加速
EMDGは、電源ユニット10から電磁石2のコイル3に電流を印加することによって開始される。ローターの永久磁石4の磁極の初期位置は、電磁石2のギャップに垂直である。この場合、電磁石の磁極の変化は、ローター5の永久磁石4が磁力によってその回転軸16上で回転し始め、その磁極によって電磁石2の反対の磁極に引き付けられるように起こる。磁石4の反対の磁極と電磁石2のギャップの端が一致するこの瞬間に、コイル3の電流は磁気リードリレーのコマンドによってオフになります(またはこの電流の正弦波はゼロを通過します)。慣性により、大容量ローターはPM 4とともにその軌道のこのデッドポイントを通過します。その後、コイル3の電流の方向が変更され、この作業ギャップ内の電磁石2の磁極は磁気と同じになります。永久磁石の極4。その結果、磁気反発力 同じ磁極のia-ローターの永久磁石4とローター自体は、同じ方向のローターの回転方向に作用する追加の加速モーメントを受け取ります。 PMローターの磁極の位置に到達した後(回転しながら)、磁気子午線に沿って、コイル3において、第2の磁気位置センサー11のコマンドで電流の方向を再び変更し、磁極の反転。電磁石2の磁気は再び作動ギャップで発生し、永久磁石4は再びそのギャップの回転方向に電磁石2の最も近い反対の磁極に引き付けられ始める。 そして、回転子のPMの位置センサ11からスイッチ7のトランジスタ8を循環させることによってコイル3の電流を周期的に逆転させることによる、PM4および回転子の加速のプロセスが繰り返し周期的に繰り返される。 同時に、PM 4とローター5が加速すると、コイル3の電流の反転周波数が自動的に増加します。これは、この電気機械システムに、整流子と位置センサーを介した回路に沿った正のフィードバックが存在するためです。ローターのPM4。
コイル3の電流の方向(図1の矢印で示されている)は、スイッチ7のトランジスタ8のどちらが開いているかによって変わることに注意してください。 トランジスタのスイッチング周波数を変えることにより、電磁石のコイル3の交流の周波数を変え、それに応じて、ローター5のPM4の回転速度を変える。
結論:したがって、その軸の周りを完全に回転するローターの永久磁石は、電磁気の磁極との力の磁気相互作用からほぼ連続的に一方向の加速モーメントを経験し、それが回転を設定し、それと発電機を徐々に加速します与えられた定常速度回転への共通の回転シャフト上。
回転子PMの位置に応じた固定子電磁石EMDGの巻線の電気的制御の直接的な方法
定常運転の交流発電機の出力から直接必要な周波数と位相の交流電流で電磁石3MDの巻線を制御するそのような方法を提供するための追加の革新は、磁気モーターのそのようなシステムへの導入です。 -発電機-並列共振L-C回路-回路には2つのインダクタンスがあります-発電機のコイル3とステータ巻線から、追加の電気容量を確保するために発電機8の出力電気回路に追加の電気コンデンサ17を導入しますその自己励起およびその後の電気的L-C共振により、電気的損失を低減し、発電機8から直接所望の電圧および電流相で電流を交流することにより、インダクタンス3を非常に簡単に制御する。
完全自律モード(「永続モバイル」)EMDG
この装置を「永久運動」モードで確実に動作させるためには、必要なEMDシャフトで発電機を生成するのに十分な、ローターの永久磁石から自由エネルギーを取得する必要があることは明らかです。システムのこの完全に自律的な操作のために-電気。 したがって、最も重要な条件は、このMDの磁気ローターが、そのシャフトに十分な量の電気を生成するのに十分なトルクを持っていることを確認することです。ローターにPMを備えたこのような電気機械システムでのさまざまな不可避の損失。 PM 4が巻き戻され、ローターが公称5回転に達した後、コイル3の電源を発電機から直接、または追加の電圧変換器を介して切り替え、スターター電源を完全にオフにするか、再充電モードにします。このEMDのシャフトの発電機から。
「PPERPMOBILE」モードでのこのモータージェネレーターの操作に必要な構造アセンブリと制御アルゴリズム
「永久運動」モードでのDMの動作に関するこの重要な条件は、少なくとも6つの条件が同時に満たされている場合にのみ満たすことができます。
1. MDでの最新の強力なニオブ永久磁石の使用。これにより、PMの最小寸法で、このようなローターの最大トルクが提供されます。
2.電磁石巻線の巻き数が非常に多く、磁気回路と巻線が正しく効率的に設計されているため、MD固定子に効果的な超低コストのMD電磁石回路を使用します。
3.スイッチからの電磁石コイルの電源でMDを始動および加速するための始動装置および始動電源の必要性。
4.ローターPMの位置に応じて、電磁石巻線の電流を方向、大きさで制御するための正しいアルゴリズム。
5.発電機の電気的パラメータと電磁石の巻線の調整。
6.電磁石巻線の電源回路で発電機回路がオンになり、ABなどの始動電源が放電モードから転送されたときに電磁石巻線の電源回路を切り替えるための正しいアルゴリズムその電気充電のモードに。
EMDローターPMの位置に依存する電磁石コイルの電流を切り替えるためのアルゴリズム(図1)
ローターの1回転ごとにEMDローターに1つの棒磁石が存在する場合にコイルの電流を切り替えるアルゴリズムを考えてみましょう(図3)。このEMDの効果的な動作を保証するために(図1の設計) 、巻線3ステータ電磁石1のローター位置と電流の方向を組み合わせた図を使用します。これらの図から、電磁石1 EMDを制御するための正しいアルゴリズムの本質は、PMローターが完全に1回転することです。電磁石の誘導巻線3の電流は2つの完全な振動をする。すなわち、電気の周波数電磁石1の巻線3に取り付けられた電子スイッチによって制御される電流。ローターPM位置センサーのコマンドにより、ローター速度の2倍に等しく、この電流の位相はローターPM位置と厳密に同期されます。 EMD。 スイッチは巻線3の電流の方向を切り替えるため(逆電流)、PMの磁極と磁気回路の両端の磁極がの作業ギャップで一致する場合、PMの磁気赤道上で厳密に発生します。電磁石1の磁気回路2は、その結果、ローターのPMが完全に1回転する間、常に一方向トルクの加速を経験し、磁気回路の両端の反対側の磁極の引力から2回発生します。電磁石とローターのPM、そして2回-それらの同様の磁極の反発の磁力のために。
図4回転子PMを1回転させるための固定子電磁石の巻線電流を逆転させるための電子スイッチの動作のタイミング図
図5EMDGローターのPMを1回転させたときの電磁石のギャップ内の磁極交代のサイクログラム
電磁石EMDのアルゴリズムの説明へ:
3.4-電磁石1のアーク磁気回路2の端の磁極
巻線3のコイルは、電磁石1の磁気回路2上に配置されている。
9.ローターマグネット