DC motoru
DC motor, elektrik enerjisini mekanik enerjiye dönüştüren diğer makine türlerinden önce icat edildi. AC motorlar son zamanlarda en popüler hale gelse de DC motorlara alternatifin olmadığı uygulamalar da var.
DC ve AC motor
Buluş tarihi
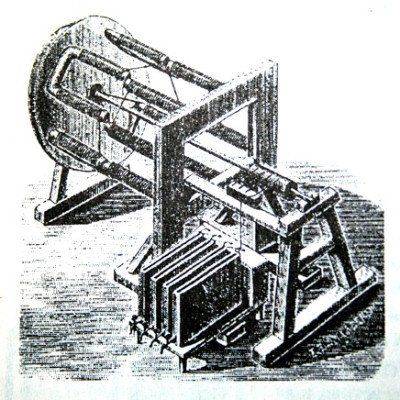
Jacobi elektrik motoru.
DC elektrik motorlarının (DC motorlar) çalışma prensibini anlamak için yaratılış tarihine dönüyoruz. Böylece, elektrik enerjisinin mekanik enerjiye dönüştürülebileceğinin ilk deneysel kanıtı Michael Faraday tarafından gösterildi. 1821'de, altında kalıcı bir mıknatıs bulunan cıva ile dolu bir kaba indirilen bir iletken ile bir deney yaptı. İletkene elektrik uyguladıktan sonra, mıknatısın etrafında dönmeye başladı ve kapta bulunan manyetik alana tepkisini gösterdi. Faraday'ın deneyi pratik bir uygulama bulamadı, ancak elektrikli makineler yaratma olasılığını kanıtladı ve elektromekaniğin gelişmesine yol açtı.
Hareketli parçanın (rotor) dönme prensibine dayanan ilk DC elektrik motoru, 1834 yılında Rus mekanik fizikçi Boris Semenovich Jacobi tarafından yaratıldı. Bu cihaz şu şekilde çalıştı:
Tarif edilen prensip, Jacobi'nin 1839'da 12 yolculu bir tekneye kurduğu bir motorda kullanıldı. Gemi akıntıya karşı 3 km/s hızla sarsıntıyla ilerliyordu (diğer kaynaklara göre - 4,5 km/s), ancak başarılı bir şekilde nehri geçti ve yolcuları kıyıya indirdi. Güç kaynağı olarak 320 galvanik hücreli bir pil kullanılmış ve hareket çarklar kullanılarak gerçekleştirilmiştir.
Konunun daha fazla araştırılması, araştırmacıları, hangi güç kaynaklarının en iyi kullanılacağı, performansının nasıl iyileştirileceği ve boyutlarının nasıl optimize edileceği ile ilgili bir dizi soruyu çözmeye yöneltti.
1886'da Frank Julian Sprague ilk olarak bugün kullanılanlara benzer bir doğru akım elektrik motoru tasarladı. Kendi kendini uyarma ilkesini ve elektrikli makinenin tersine çevrilebilirliği ilkesini uyguladı. Bu zamana kadar, bu tipteki tüm motorlar daha uygun bir kaynaktan - bir DC jeneratörü - güce geçti.
Fırça-toplayıcı tertibatı, rotor devresinin makinenin sabit kısmında bulunan devrelerle elektrik bağlantısını sağlar.
Cihaz ve çalışma prensibi
Modern DPT'lerde, yüklü bir iletkenin manyetik alanla aynı etkileşim ilkesi kullanılır. Teknolojinin gelişmesiyle birlikte, cihaz yalnızca performansı artıran bazı unsurlarla destekleniyor. Örneğin günümüzde kalıcı mıknatıslar, büyük makinelerde çok fazla yer kaplayacakları için yalnızca düşük güçlü motorlarda kullanılmaktadır.
temel ilke
Bu tip motorların ilk prototipleri, modern cihazlardan belirgin şekilde daha basitti. İlkel cihazları, yalnızca iki mıknatıslı bir statoru ve akımın uygulandığı sargılı bir armatürü içeriyordu. Manyetik alanların etkileşimi ilkesini inceleyen tasarımcılar, aşağıdaki motor çalışma algoritmasını belirlediler:
- Güç kaynağı armatür sargılarında bir elektromanyetik alan oluşturur.
- Elektromanyetik alanın kutupları, kalıcı mıknatıs alanının aynı kutuplarından itilir.
- Armatür, bağlı olduğu mil ile birlikte sargının itici alanına göre döner.
Bu algoritma teoride mükemmel çalıştı, ancak pratikte, ilk motorların yaratıcıları, makinenin çalışmasını engelleyen belirli sorunlarla karşı karşıya kaldı:
- Motorun çalıştırılamayacağı ölü konum - kutuplar tam olarak birbirinin önüne yerleştirildiğinde.
- Kutupların güçlü direnci veya zayıf itmesi nedeniyle başlayamama.
- Rotor bir devirden sonra durur. Bunun nedeni, dairenin yarısını geçtikten sonra mıknatısın çekiciliğinin hızlanmaması, ancak rotorun dönüşünü yavaşlatmasıdır.
İlk sorunun çözümü oldukça hızlı bir şekilde bulundu - bunun için ikiden fazla mıknatıs kullanılması önerildi. Daha sonra, belirli bir zamanda sadece bir çift sargıya güç sağlayan motor cihazına birkaç sargı ve bir toplayıcı fırça tertibatı dahil edildi.
Toplayıcı-fırçalı akım besleme sistemi ayrıca rotor frenleme problemini de çözer - rotorun dönüşünün yavaşlamaya başladığı ana kadar polarite değişimi gerçekleşir. Bu, motorun bir devri sırasında en az iki kutup değişimi olduğu anlamına gelir.
Düşük ani akımlar sorunu aşağıda ayrı bir bölümde tartışılmaktadır.
Tasarım
Böylece, motor gövdesine sabit bir mıknatıs sabitlenir ve onunla birlikte rotorun bulunduğu bir stator oluşturur. Armatür sargısına güç verildikten sonra, statorun manyetik alanı ile etkileşime giren bir elektromanyetik alan ortaya çıkar, bu, şaft üzerine rijit bir şekilde monte edilen rotorun dönmesine yol açar. Elektrik akımını kaynaktan armatüre aktarmak için motor, aşağıdakilerden oluşan bir toplayıcı-fırça tertibatı ile donatılmıştır:
- Kolektör. Bir dielektrik malzeme ile ayrılmış, armatür sargılarına bağlı ve doğrudan motor miline monte edilmiş birkaç bölümden oluşan bir akım toplayıcı halkadır.
- Grafit fırçalar. Basınç yayları ile kollektörün temas pedlerine bastırılan fırçalar kullanarak kollektör ile güç kaynağı arasındaki devreyi kapatırlar.
Armatür sargıları bir uçta birbirine, diğer uçta kollektör bölümlerine bağlanır, böylece akımın aşağıdaki yol boyunca aktığı bir devre oluşturur: giriş fırçası -> rotor sargısı -> çıkış fırçası.
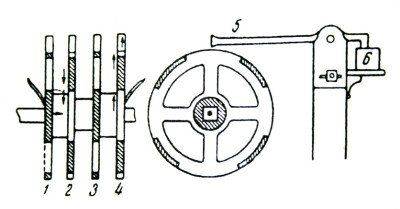
Verilen devre şeması (Şekil 3), iki bölümden oluşan bir kollektör ile ilkel bir DC motorun çalışma prensibini göstermektedir:
- Bu örnekte, şemada gösterildiği gibi rotorun başlangıç konumunu ele alacağız. Böylece, “+” ile işaretlenmiş alt fırçaya güç verildikten sonra, akım sargıdan akar ve çevresinde bir elektromanyetik alan oluşturur.
- Jilet kuralına göre çapanın kuzey kutbu sol alt kısımda, güney kutbu ise sağ üst kısımda oluşturulur. Aynı adı taşıyan stator kutuplarının yakınında yer almakta, itmeye başlarlar, böylece rotoru harekete geçirir, bu da zıt kutuplar birbirinden minimum mesafede olana kadar devam eder, yani son konuma gelirler (Şek. 1).
- Bu aşamada kollektörün tasarımı, armatür sargılarında polaritenin tersine dönmesine neden olacaktır. Bunun sonucunda manyetik alanların kutupları yeniden yakın mesafede olacak ve birbirini itmeye başlayacaktır.
- Rotor tam bir devrim yapar ve kolektör polariteyi tekrar tersine çevirerek hareketini sürdürür.
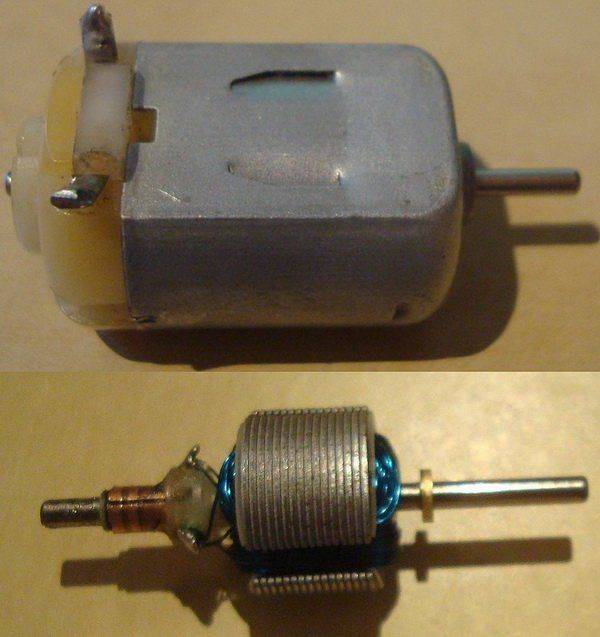
DC Motor Parçaları
Burada, daha önce belirtildiği gibi, ilkel bir prototipin çalışma prensibi gösterilmiştir. Gerçek motorlar ikiden fazla mıknatıs kullanır ve komütatör, düzgün dönüş sağlayan daha fazla temas pedinden oluşur.
Yüksek güçlü motorlarda, büyüklükleri nedeniyle kalıcı mıknatısların kullanımı mümkün değildir. Bunlar için bir alternatif, her biri besleme baralarına bağlı kendi sargısına sahip birkaç iletken çubuk sistemidir. Aynı adı taşıyan direkler seri olarak ağa dahil edilmiştir. Gövde üzerinde 1 ila 4 çift kutup bulunabilir ve bunların sayıları kollektördeki akım toplayan fırçaların sayısına karşılık gelmelidir.
Yüksek güç için tasarlanmış elektrik motorları, "daha hafif" emsallerine göre bir dizi işlevsel avantaja sahiptir. Örneğin, akım toplayan fırçaların yerel düzenlemesi, "armatür reaksiyonu" olarak adlandırılan, şaftın frenlemesini telafi etmek için onları mile göre belirli bir açıda döndürür.
Başlangıç akımları
Motor rotorunun kesintisiz çalışmasını sağlayan ve sektörel frenlemeyi hariç tutan ek elemanlarla kademeli olarak donatılması, başlatma sorunu ortaya çıkar. Ancak tüm bunlar rotorun ağırlığını arttırır - milin direncini hesaba katarak, onu yerinden itmek daha zor hale gelir. Bu sorun için ilk akla gelen çözüm başlangıçta verilen akımı artırmak olabilir ancak bu hoş olmayan sonuçlara yol açabilir:
- hattın devre kesicisi akıma dayanmayacak ve kapanacaktır;
- sargı telleri aşırı yükten yanacak;
- kollektördeki anahtarlama sektörleri aşırı ısınmadan kaynaklanacaktır.
Bu nedenle, böyle bir karar oldukça riskli bir yarı önlem olarak adlandırılabilir.
Genel olarak, bu sorun DC motorların ana dezavantajıdır, ancak bazı alanlarda vazgeçilmez olmaları nedeniyle ana avantajlarını içerir. Bu avantaj, çalıştırmadan hemen sonra torkun doğrudan transferinde yatmaktadır - mil (hareket etmeye başlarsa) herhangi bir yükle dönecektir. AC motorlar bunu yapamaz.
Şimdiye kadar, bu sorun tamamen çözülmedi. Bugüne kadar, bu tür motorları çalıştırmak için, çalışma prensibi bir otomobil şanzımanına benzeyen otomatik bir marş kullanılır:
- İlk olarak, akım kademeli olarak başlangıç değerine yükselir.
- Yerden “kaydıktan” sonra, mevcut değer keskin bir şekilde düşer ve “milin dönüşünü ayarlayarak” tekrar yumuşak bir şekilde yükselir.
- Limit değerine yükseldikten sonra akım gücü tekrar azalır ve “ayarlanır”.
Bu döngü 3-5 kez tekrarlanır (Şekil 4) ve ağda kritik yükler oluşmadan motoru çalıştırma ihtiyacını çözer. Aslında, hala "yumuşak" bir başlangıç yoktur, ancak ekipman güvenli bir şekilde çalışır ve DC motorun ana avantajı - tork - korunur.
Bağlantı şemaları
Bir DC motoru bağlamak, AC özellikli motorlardan biraz daha zordur.
Yüksek ve orta güçlü motorlar, kural olarak, terminal kutusuna yerleştirilmiş özel alan sargısına (OB) ve armatür kontaklarına sahiptir. Çoğu zaman, kaynağın çıkış voltajı armatüre uygulanır ve kural olarak bir reostat tarafından ayarlanan akım OB'ye uygulanır. Motorun dönüş hızı, doğrudan uyarma sargısına uygulanan akımın gücüne bağlıdır.
DC motorların armatürünü ve uyarma sargısını açmak için üç ana şema vardır:
- Başlangıçta büyük akım gerektiren motorlarda (elektrikli araçlar, kiralık ekipman vb.) sıralı uyarma kullanılır. Bu şema, OF ve armatürün kaynağa seri bağlanmasını sağlar. Gerilim uygulandıktan sonra, aynı büyüklükteki akımlar armatür sargılarından ve OB'den geçer.Sıralı uyarma ile şaft üzerindeki yükün dörtte bir oranında bile azaltılmasının hızda keskin bir artışa yol açabileceği ve bunun yol açabileceği akılda tutulmalıdır. motor arızası, bu nedenle bu devre sabit yük koşullarında kullanılır.
- Paralel tahrik, devreye alma anında mile fazla yük bindirmeyen takım tezgahlarının, fanların ve diğer ekipmanların çalışmasını sağlayan motorlarda kullanılmaktadır. Bu devrede, çoğunlukla bir reostat tarafından düzenlenen OF'yi uyarmak için bağımsız bir sargı kullanılır.
- Bağımsız uyarma, paralel uyarmaya çok benzer, ancak bu durumda, OB'ye güç sağlamak için bağımsız bir kaynak kullanılır ve bu, armatür ile uyarma sargısı arasında bir elektrik bağlantısının görünümünü ortadan kaldırır.
Modern DC elektrik motorlarında, açıklanan üçüne dayalı olarak karışık devreler kullanılabilir.
Dönme hızı ayarı
DPT'nin hızını düzenlemenin yolu, bağlantı şemasına bağlıdır:
- Paralel uyarılı motorlarda, armatür voltajı değiştirilerek nominal değere göre hızda bir azalma, uyarım akışını zayıflatarak bir artış yapılabilir. Hızı artırmak için (nominal değere göre en fazla 4 kat), OB devresine bir reosta eklenir.
- Seri uyarma ile armatür devresindeki değişken bir direnç ile ayar kolaylıkla yapılır. Doğru, bu yöntem yalnızca hızı azaltmak için ve yalnızca 1:3 veya 1:2 oranlarında uygundur (ayrıca bu, reostada büyük kayıplara yol açar). Artış, OB devresinde bir ayar reostatı kullanılarak gerçekleştirilir.
Bu devreler, dar bir ayar aralığına ve diğer dezavantajlara sahip olduklarından, modern yüksek teknoloji ekipmanında nadiren kullanılır. Günümüzde bu amaçlar için elektronik kontrol devreleri giderek daha fazla oluşturulmaktadır.
geri vites
Bir DC motorun dönüşünü tersine çevirmek (tersine çevirmek) için şunları yapmanız gerekir:
- seri uyarma ile - sadece giriş kontaklarının polaritesini değiştirin;
- karışık ve paralel uyarma ile - armatür sargısındaki akımın yönünü değiştirmek gerekir; OF'nin kopması, enjekte edilen elektromotor kuvvette kritik bir artışa ve tel yalıtımının bozulmasına yol açabilir.
Uygulama kapsamı
Daha önce anladığınız gibi, şebekeye kesintisiz kesintisiz bağlantının mümkün olmadığı durumlarda DC motorların kullanılması tavsiye edilir. Burada iyi bir örnek, içten yanmalı bir motoru "bir yerden" iten bir araba marş motoru veya motorlu çocuk oyuncaklarıdır. Bu durumlarda, motoru çalıştırmak için piller kullanılır. Endüstriyel amaçlar için, haddehanelerde DPT'ler kullanılır.
DPT'nin ana uygulama alanı elektrikli ulaşımdır. Buharlı tekneler, elektrikli lokomotifler, tramvaylar, troleybüsler ve diğer benzerleri, yumuşak özellikleri ve geniş dönüş limitleri düzenlemesi ile ancak DC motorların yardımıyla üstesinden gelinebilecek çok büyük bir kalkış direncine sahiptir. Çevresel ulaşım teknolojilerinin hızlı gelişimi ve yaygınlaşması göz önüne alındığında, DPT'nin kapsamı giderek artmaktadır.

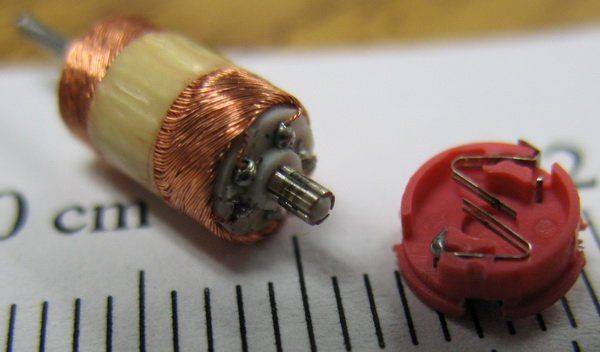
En basit fırça toplayıcı tertibatı
Avantajlar ve dezavantajlar
Yukarıdakilerin hepsini özetleyerek, DC motorların AC üzerinde çalışmak üzere tasarlanmış muadillerine göre karakteristik avantaj ve dezavantajlarını açıklamak mümkündür.
Ana avantajlar:
- Güçlü bir başlangıç torkunun gerekli olduğu durumlarda DCT'ler vazgeçilmezdir;
- armatür dönüş hızı kolayca ayarlanabilir;
- DC motor evrensel bir elektrik makinesidir, yani jeneratör olarak kullanılabilir.
Ana dezavantajlar:
- DPT'lerin yüksek üretim maliyeti vardır;
- bir fırça toplayıcı tertibatının kullanılması, sık bakım ve onarım ihtiyacına yol açar;
- Çalıştırmak için bir DC güç kaynağı veya doğrultucu gerektirir.
DC elektrik motorları, elbette, maliyet ve güvenilirlik açısından "değişken" muadillerine kaybederler, ancak belirli alanlarda kullanımlarının avantajları kategorik olarak tüm dezavantajları aştığı için kullanılırlar ve kullanılacaklardır.