Sürekli elektromanyetik motor jeneratörü
Bu makale, stator üzerinde bir elektromıknatıs ve üzerinde sadece bir kalıcı mıknatıs (PM) bulunan yeni tip basit bir orijinal "sürekli" elektromanyetik motor jeneratörünün çalışma prensibi, tasarımları ve elektrik devresinin geliştirilmesi ve tanımlanmasına ayrılmıştır. rotor, bu elektromıknatısın çalışma boşluğunda bu PM'nin dönüşü ile.
STATOR ÜZERİNDE ELEKTROMANYETİK VE ROTOR ÜZERİNDE MIKNATISLI SÜREKLİ ELEKTROMANYETİK MOTOR-JENERATÖR
1. Giriş
2. Kalıcı bir mıknatısta ne kadar enerji gizlidir ve nereden gelir?
3. PM'li elektromanyetik motorların ve jeneratörlerin kısa bir incelemesi
4. Alternatif akımlı bir elektromıknatısa sahip modernize edilmiş elektromanyetik motor jeneratörünün tasarımının ve elektriğinin tanımı
5. Rotorda harici PM'li ters çevrilebilir elektromanyetik motor
6. "Sürekli" elektromanyetik motor jeneratörünün çalışmasının açıklaması
7. Bu elektromanyetik motor jeneratörünün "sürekli hareket" modunda çalışması için gerekli düğümler ve kontrol algoritmaları
8. Elektromıknatısın konumuna bağlı olarak elektromıknatıs sargısındaki elektrik akımını tersine çevirme algoritması
9. EMDG için eleman ve ekipmanın seçimi ve hesaplanması
10. Düşük maliyetli elektromıknatıs EMD (tasarım ve hesaplamanın temelleri)
11. EMD rotorunun kalıcı mıknatıslarının doğru seçimi
12. EMDG'nin prototiplenmesi için bir elektrik jeneratörü seçimi
13. Sürekli deklanşörlü elektromanyetik motor jeneratörü
14. Geleneksel bir endüksiyon elektrik sayacında sürekli elektromanyetik motor
15. Yeni EMDH'nin enerji performansının analoglarla karşılaştırılması
16. Sonuç
GİRİİŞ
Yüzyıllar boyunca sürekli hareket makineleri yaratma sorunu, dünya çapında birçok mucit ve bilim insanının zihnini heyecanlandırıyor ve hala geçerli.
Uygarlığın enerji ihtiyaçları arttıkça ve organik yenilenemeyen yakıtların tükenmesi ile bağlantılı olarak ve özellikle de başlangıcı ile bağlantılı olarak, dünya topluluğunun "sürekli hareket makineleri" konusuna olan ilgi hala büyük ve büyüyor. küresel enerji ve medeniyetin çevresel krizi. Geleceğin toplumunu inşa ederken elbette ihtiyaçlarımızı karşılayabilecek yeni enerji kaynakları geliştirmek önemlidir. Ve bugün Rusya ve diğer birçok ülke için hayati önem taşıyor. Ülkenin gelecekteki toparlanmasında ve yaklaşan enerji krizinde, çığır açan teknolojilere dayalı yeni enerji kaynakları kesinlikle gerekli olacaktır.
Birçok yetenekli mucit, mühendis ve bilim adamının gözleri uzun süredir kalıcı mıknatıslara (PM) ve onların gizemli ve şaşırtıcı enerjisine kilitlenmiş durumda. Ayrıca, güçlü PM'lerin yaratılmasındaki önemli ilerleme ve kısmen önerilen manyetik motor (MF) tasarımlarının basitliği nedeniyle, PM'lere olan bu ilgi son yıllarda daha da artmıştır.
Kalıcı bir mıknatısta ne kadar enerji gizlidir ve nereden gelir?
Modern kompakt ve güçlü PM'lerin, manyetik alanın önemli gizli enerjisini içerdiği açıktır. Ve bu tür manyetik motorların ve jeneratörlerin mucitlerinin ve geliştiricilerinin amacı, PM'nin bu gizli enerjisini izole etmek ve diğer enerji türlerine, örneğin manyetik rotorun sürekli dönüşünün mekanik enerjisine veya elektriğe dönüştürmektir. Yanma sırasında kömür grama 33 J, ülkemizde 10-15 yıl sonra bitmeye başlayacak olan petrol, grama 44 J, gram uranyum ise 43 milyar J enerji veriyor. Kalıcı bir mıknatıs teorik olarak 17 milyar joule enerji içerir. bir gram için. Elbette geleneksel enerji kaynaklarında olduğu gibi mıknatısın verimi yüzde yüz olmayacaktır ayrıca bir ferrit mıknatısın ömrü, güçlü fiziksel, sıcaklık ve manyetik yüklere maruz kalmamak şartıyla yaklaşık 70 yıl civarındadır, ancak , içinde bu kadar çok enerji varken, o kadar da önemli değil. Ayrıca, ferrit olanlardan on kat daha güçlü ve dolayısıyla daha verimli olan nadir metallerden yapılmış seri endüstriyel mıknatıslar zaten var. Gücünü kaybetmiş bir mıknatıs, güçlü bir manyetik alanla basitçe "yeniden doldurulabilir". Bununla birlikte, “PM'de bu kadar çok enerji nereden geliyor” sorusu bilimde açık kalıyor. Birçok bilim adamı, PM'deki enerjinin sürekli olarak eterden (fiziksel boşluk) dışarıdan geldiğine inanmaktadır. Ve diğer araştırmacılar, PM'nin manyetize edilmiş malzemesi nedeniyle basitçe kendi içinde ortaya çıktığını savunuyorlar. Şu ana kadar netlik yok.
BİLİNEN ELEKTROMANYETİK MOTORLAR VE JENERATÖRLERİN KISA İNCELEMESİ
Dünyada manyetik motorların çeşitli tasarımları için zaten birçok patent ve mühendislik çözümü var - ancak gösteride henüz "sürekli hareket" modunda bu tür çalışan MD'ler yok. Ve şimdiye kadar, “sürekli” endüstriyel manyetik motorlar (IM) bir seri halinde oluşturulmamış ve yönetilmemiştir ve gerçeğe sunulmamıştır ve dahası, henüz açık satışa sunulmamıştır. Ne yazık ki, internette Perendev (Almanya) ve Akoil-energy'den seri manyetik motor jeneratörleri hakkında iyi bilinen bilgiler henüz gerçekte doğrulanmadı. MD'de metaldeki yavaş gerçek ilerlemenin birçok olası nedeni vardır, ancak görünüşe göre iki ana neden vardır: bu gelişmelerin sınıflandırılması nedeniyle, seri üretime getirilmemeleri veya pilot endüstriyel örneklerin düşük enerji performansı nedeniyle. MD'nin. Mekanik kompansatörlü ve manyetik ekranlı, örneğin perde tipi MD gibi tamamen manyetik motorlar yaratmanın bazı sorunlarının henüz bilim ve teknoloji tarafından tam olarak çözülmediğine dikkat edilmelidir.
Bilinen bazı MD'lerin sınıflandırılması ve kısa analizi
- Manyeto-mekanik manyetik motorlar Dudyshev/1-3/. Yapıcı iyileştirmeleriyle "sürekli hareket" modunda çalışabilirler.
- Motor MD Kalinina- Döner manyetik ekranlı çalışmayan pistonlu MD - Yay dengeleyicinin doğru tasarım çözümüne getirilmemesi nedeniyle MD.
- Elektromanyetik motor "Perendev"- rotorun PM ile tutulmasının ölü noktalarının geçtiği alanlarda komütasyon işlemi olmadan çalışmayan, rotorda PM ve kompansatöre sahip klasik bir elektromanyetik motor. İçinde iki tür anahtarlama mümkündür (rotorun PM'sinin “tutma noktasını” geçmesine izin verir - mekanik ve elektromanyetik. Birincisi, sorunu otomatik olarak SMOT'a'nın döngülü bir versiyonuna indirir (ve dönüş hızını sınırlar ve dolayısıyla güç), ikincisi daha düşüktür. "Sürekli motorda" çalışamaz.
- Minato Elektromanyetik Motor- PM rotorlu bir elektromanyetik motorun klasik bir örneği ve “tutma noktasının” manyetik rotorunun geçişini sağlayan bir elektromanyetik kompansatör (Minato'ya göre, “çökme noktası”). Prensip olarak, bu sadece artan verimliliğe sahip çalışan bir elektromanyetik motordur. Ulaşılabilir maksimum verimlilik, "sürekli" MD modunda yaklaşık %100 çalışamaz durumdadır.
- Johnson motoru- Perendev elektromanyetik motorunun bir kompansatörlü, ancak daha da düşük enerjili bir analogu.
- Shkondin manyetik motor jeneratörü- PM'nin manyetik itme kuvvetleri üzerinde çalışan PM'li bir elektromanyetik motor (dengeleyici olmadan). Yapısal olarak karmaşıktır, toplayıcı-fırça düzeneğine sahiptir, verimliliği yaklaşık %70-80. Ebedi MD modunda çalışmaz.
- Adams Elektromanyetik Motor-Jeneratör- bu aslında bilinenlerin en gelişmişidir - Shkondin'in motor tekerleği gibi çalışan bir elektromanyetik motor jeneratörü, sadece PM'nin elektromıknatısların uçlarından manyetik itme kuvvetleri üzerinde. Ancak bu PM tabanlı motor-jeneratör, Shkondin'in manyetik motor-jeneratöründen yapısal olarak çok daha basittir. Prensip olarak, verimliliği yalnızca %100'e yaklaşabilir, ancak yalnızca elektromıknatıs sargısı, yüklü bir kapasitörden gelen kısa bir yüksek yoğunluklu darbe ile değiştirilirse. "Ebedi" MD modunda çalışmaz.
- Dudyshev elektromanyetik motor. Harici manyetik rotorlu ve merkezi stator elektromıknatıslı ters çevrilebilir elektromanyetik motor). Manyetik devrenin /3/ açıklığından dolayı verimi %100'den fazla değildir. Bu EMD kullanımda test edilmiştir (düzenin fotoğrafı mevcuttur).
Diğer EMD'ler de bilinmektedir, ancak yaklaşık olarak aynı çalışma prensiplerine sahiptirler. Ancak yine de, dünyadaki manyetik motorların teorisi ve pratiğinin gelişimi hala yavaş yavaş devam ediyor. Ve özellikle MD'deki somut gerçek ilerleme, içlerinde yüksek verimli kalıcı mıknatısların kullanıldığı düşük maliyetli kombine manyeto-elektromanyetik motorlarda tam olarak özetlenmiştir. Dünya topluluğu için bu kadar önemli olan bu en yakın analoglara - sürekli manyetik motorların prototiplerine - stator veya rotor üzerinde elektromıknatıslı ve kalıcı mıknatıslı elektromanyetik motor jeneratörleri (EMDG) denir. Dahası, zaten gerçekten varlar, sürekli geliştiriliyorlar ve hatta bazıları zaten seri olarak üretiliyor. İnternette oldukça fazla mesaj ve fotoğraflı tasarımları ve deneysel çalışmaları hakkında makaleler çıktı. Örneğin, etkili, metalde zaten test edilmiş, nispeten düşük maliyetli Adams elektromanyetik motor jeneratörleri /1/ bilinmektedir. Ayrıca, birleşik EMDG'lerin en basit tasarımlarından bazıları, seri üretime ve toplu uygulamaya bile ulaştı. Bunlar, örneğin Shkondin'in elektrikli bisikletlerde kullanılan seri elektromanyetik motor tekerlekleridir.
Bununla birlikte, bilinen tüm EMDG'lerin tasarımları ve güç mühendisliği hala oldukça verimsizdir ve bu da onların "sürekli hareket" modunda, yani. harici bir güç kaynağı olmadan.
Bununla birlikte, bilinen EMDG'lerin yapıcı ve radikal enerji iyileştirme yolları vardır. Ve bu zor görevle - "sürekli" bir elektromanyetik motor jeneratörü modunda tamamen özerk çalışma - harici bir kaynaktan herhangi bir elektrik tüketimi olmadan başa çıkabilen ve bu makalede ele alınan, enerjik olarak daha gelişmiş seçeneklerdir.
Bu makale, stator üzerinde bir ark elektromıknatısı ve rotorda sadece bir kalıcı mıknatıs (PM) bulunan yeni tipte basit bir elektromanyetik motor jeneratörünün orijinal tasarımının çalışma prensibinin geliştirilmesine ve tanımlanmasına ayrılmıştır. Bu PM'nin "sürekli hareket jeneratörü" modunda oldukça çalışabilen elektromıknatısın boşluğunda polar dönüşü.
Önceden ve kısmen, farklı bir geri dönüşümlü versiyonda böyle sıra dışı bir polar EMD'nin bu tasarımı, makalenin yazarının mevcut maketleri üzerinde zaten test edilmiş ve çalışabilirlik ve oldukça yüksek enerji performansı göstermiştir.
Modernize edilmiş EMDG'nin tasarımının ve elektrik devresinin tanımı
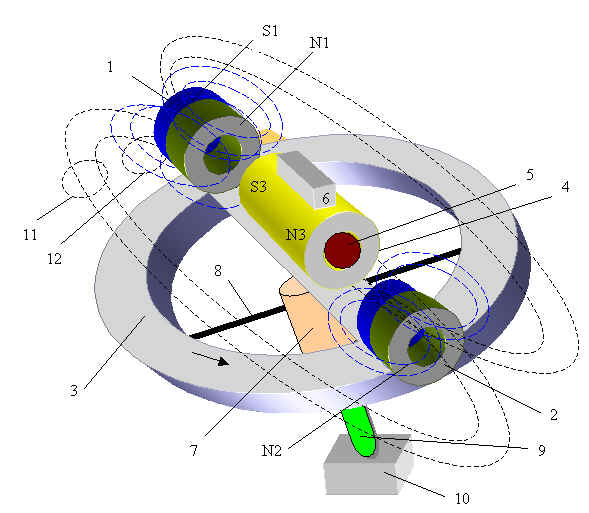
Şekil 1 Rotorda PM'li elektromanyetik motor-jeneratör, statorda harici bir alternatif akım elektromıknatısı ve manyetik rotor şaftında bir elektrik jeneratörü
Bu tipte bir elektromanyetik motor jeneratörünün (EMG) basitleştirilmiş bir tasarımı ve elektriksel kısmı, Şek. 1. Üç ana üniteden oluşur - doğrudan stator üzerinde bir elektromıknatıs ve rotor üzerinde PM ile DM'den ve DM ile aynı şaft üzerinde bir elektromekanik jeneratörden oluşur. MD cihazı, bu elektromıknatısın bir endüktif bobini 3 ile bir dairesel segment üzerinde veya bir ark manyetik devresi 2 üzerinde yapılmış bir stator statik elektromıknatısından 1 ve buna bağlı bobinde 3 akımın ters çevrilmesi için bir elektronik anahtardan ve bir bu elektromıknatısın 1 çalışma boşluğunda rotor 5 üzerine sabit bir şekilde yerleştirilmiş kalıcı mıknatıs (PM) 4 EMD'nin rotorunun 5 dönme şaftı, elektrik jeneratörünün 8 şaftına 7 bir bağlantı ile bağlanır. en basit regülatör ile - çıkışa endüktif sargıya 3 elektromıknatısa 2 ve güç kaynağı girişi yoluyla elektriksel olarak bağlı basit bir köprü yarı kontrollü otonom invertör şemasına göre yapılmış bir elektronik anahtar 6 (otonom invertör) otonom bir elektrik kaynağı 10. Ayrıca, elektromıknatısın 1 tersinir endüktif sargısı 3, bu anahtarın 6 alternatif akım köşegenine dahil edilir ve DC devresi aracılığıyla bu anahtar 6, örneğin, aşağıdaki gibi bir tampon DC kaynağına 10 bağlanır. elektrikli makine jeneratörünün 8 elektrik çıkışı ya doğrudan endüktif bobinin 3 sargılarına ya da bir ara elektronik doğrultucu (gösterilmemiştir) aracılığıyla bir tampon DC kaynağına (AB tipi) 7 bağlanır.
Köprünün en basit elektronik anahtarı (otonom invertör) 4 yarı iletken valf üzerinde yapılır, iki güç transistörü 9 ve köprünün kollarında iki kontrol edilemeyen tek yönlü iletim (diyot) 10 temassız anahtarı içerir.Konumun iki sensörü 11 PM mıknatısı ayrıca rotorun 6 bu MD 5'inin elektromanyetik statoru 1 üzerine, hareketinin yörüngesinin 15 yakınında ve rotorun PM-mıknatısının 5 konum sensörü olarak, manyetik basit kontak sensörleri yerleştirilmiştir. alan yoğunluğu - reed anahtarlar kullanılır. Rotorun (5) mıknatısının (4) bu konum sensörleri (11) dörtlü olarak yerleştirilir - bir sensör, kutuplu solenoidin ucuna yakın bir yerde bulunur ve ikincisi, PM5'in dönüş yolunun yakınında 90 derece (kamış anahtarları) kaydırılır. Rotorun bu konum sensörlerinin (11 PM5) çıkışları, reed anahtarlardır, röleler, bir yükseltici mantık cihazı (12) aracılığıyla transistörlerin 9 kontrol girişlerine bağlanır. bir anahtar (gösterilmemiştir) aracılığıyla elektrik jeneratörünü (8) DC başlatma ünitesinden elektrik jeneratöründen (gösterilmemiştir) tam güç kaynağına geçin.
Analoglara kıyasla böyle bir MD'nin ana tasarım özelliklerini not ediyoruz:
1. Çok turlu ekonomik bir düşük amper ark elektromıknatısı kullanılır.
2. Rotorun 5 daimi mıknatısı 4, tam olarak PM 5'in manyetik çekim ve itme kuvvetleriyle ark elektromıknatısının 1 boşluğunda döner. bu elektromıknatıs, elektromıknatısın 1 bobinindeki akım yönü olduğunda, rotor 5'in mıknatıs 4'ün 11 PM konum sensörlerinin komutları. bir eylemsiz volanın faydalı işlevi.
Rotorda harici PM'li ters çevrilebilir elektromanyetik motor
Prensip olarak, EMD tasarımının ters çevrilebilir bir versiyonu da mümkündür, burada rotorun üzerinde kalıcı bir mıknatıs PM bulunan rotor elektromıknatısın dışına yerleştirilir. Daha önce, makalenin yazarı tarafından böyle bir tersine çevrilebilir EMD varyantı geliştirildi, işte oluşturuldu ve başarıyla test edildi ve 1986'da geri döndü. Aşağıda, Şekil 2,3'te, daha önce test edilmiş böyle bir basitleştirilmiş tasarım da bulunmaktadır. Yazarın makalelerinde daha önce açıklanan EMDG /2-3/
Rotor üzerinde harici bir kalıcı mıknatıs bulunan ve EMD stator elektromıknatısı çıkarılmış en basit EMD düzeninin tasarımı (tamamlanmamış) fotoğrafta gösterilmektedir (Şekil 3). Gerçekte, elektromıknatıs düzenli olarak, üzerine bu EMD'nin dönme milinin takıldığı bir üst kapağa sahip, silindirik bir dielektrik manyetik olmayan şeffaf silindirin merkezine yerleştirilir. Anahtar ve diğer elektrikler fotoğrafta gösterilmemiştir.
Şekil.2 Harici MP-manyetik rotorlu ters çevrilebilir EMDG (tamamlanmamış tasarım)
Tanımlar:
1. kalıcı mıknatıs (PM1)
2. kalıcı mıknatıs (PM2)
3. EMD dairesel rotor (rotor üzerine rijit bir şekilde yerleştirilmiş PM1.2)
4. sabit bir stator elektromıknatısının sarılması (bağımsız süspansiyon)
5. solenoid manyetik devre
6. PM rotor konum sensörleri
7. rotor mili (manyetik olmayan yatak)
8. dairesel rotorun ve milinin mekanik bağlantı parmaklıkları
9. destek mili
10. destek
11. bir elektromıknatısın güç manyetik hatları
12. Kalıcı mıknatısın manyetik çizgileri Ok, rotor 3'ün dönüş yönünü gösterir.

Şekil.3 En basit EMDG düzeninin fotoğrafı (elektromıknatısı çıkarılmış halde)
"Sürekli" elektromanyetik motor jeneratörünün çalışmasının açıklaması (Şekil 1)
Cihaz - bu sürekli elektromanyetik motor - jeneratör (Şekil 1) aşağıdaki gibi çalışır.
Manyetik rotor EMDG'nin sabit bir hıza başlatılması ve hızlandırılması
EMDG, güç kaynağı ünitesinden 10 elektromıknatısın 2 bobinine 3 elektrik akımı uygulanarak başlatılır. Rotorun kalıcı mıknatısının 4 manyetik kutuplarının ilk konumu, elektromıknatısın 2 boşluğuna diktir. Bu durumda, elektromıknatısın manyetik kutuplarının sayısı, rotorun (5) kalıcı mıknatısı (4), manyetik kuvvetler tarafından dönme ekseni (16) üzerinde dönmeye başlar ve manyetik kutupları tarafından elektromıknatısın (2) zıt manyetik kutbuna çekilir. Mıknatıs 4'ün zıt manyetik kutupları ve elektromıknatısın 2 boşluğundaki uçların çakıştığı bu anda, bobin 3'teki akım manyetik reed rölesinin komutuyla kapatılır (veya bu akımın sinüzoidi sıfırdan geçer) ve atalet ile, masif rotor, PM 4 ile birlikte yörüngesinin bu ölü noktasını geçer. Bundan sonra, bobin 3'teki akımın yönü değiştirilir ve bu çalışma boşluğundaki elektromıknatısın 2 manyetik kutupları, manyetik ile aynı olur. kalıcı mıknatısın kutupları 4. Sonuç olarak, manyetik itme kuvvetleri aynı manyetik kutupların ia'sı - rotorun kalıcı bir mıknatısı (4) ve rotorun kendisi, rotorun aynı yönde dönme yönünde hareket eden ek bir hızlanma momenti alır. PM rotorunun manyetik kutuplarının konumuna ulaştıktan sonra - dönerken - manyetik meridyen boyunca, bobinde (3) tekrar ikinci manyetik konum sensörünün (11) komutuyla akımın yönünü değiştirin, manyetik kutupların tersine çevrilmesi elektromıknatısın 2 tekrarı çalışma aralığında meydana gelir ve kalıcı mıknatıs 4 yeniden elektromıknatısın 2 kendi boşluğundaki dönüş yönünde en yakın zıt manyetik kutuplarına çekilmeye başlar. Ve sonra, PM 4 ve rotorun hızlanma süreci - anahtarın 7 transistörlerini 8 rotorun PM'sinin konum sensörlerinden 11 döndürerek bobin 3'teki elektrik akımını döngüsel olarak tersine çevirerek döngüsel olarak tekrar tekrar tekrarlanır. Ve aynı zamanda, PM 4 ve rotor 5 hızlanırken, bobin 3'teki elektrik akımının tersine çevrilme sıklığı, komütatör ve konum sensörleri aracılığıyla devre boyunca bu elektromekanik pozitif geri besleme sisteminin varlığı nedeniyle otomatik olarak artar. rotorun PM 4'ü.
Bobin 3'teki (Şekil 1'de oklarla gösterilen) elektrik akımının yönünün, anahtar 7'nin 8 transistörlerinden hangisinin açık olduğuna bağlı olarak değiştiğine dikkat edin. Transistörlerin anahtarlama frekansını değiştirerek, elektromıknatısın 3 bobinindeki alternatif akımın frekansını değiştiririz ve buna göre rotorun 5 PM 4'ünün dönüş hızını değiştiririz.
SONUÇ: Böylece, ekseni etrafında tam bir devrim için rotorun kalıcı mıknatısı, elektromıknatısın manyetik kutupları ile kuvvet manyetik etkileşiminden neredeyse sürekli olarak tek yönlü bir ivmelenme momenti yaşar, bu da onu rotasyona sokar ve yavaş yavaş onu ve elektrik jeneratörünü hızlandırır. ortak bir dönüş mili üzerinde belirli bir sabit hız dönüşüne.
Rotor PM'nin konumuna bağlı olarak stator elektromıknatıs EMDG sargısının doğrudan elektrik kontrolü yöntemi
Bir elektromıknatısın 3 MD'nin sargısını, gerekli frekans ve fazın alternatif akımı ile doğrudan sabit durum çalışmasında bir alternatif akım jeneratörünün çıkışından kontrol etmek için böyle bir yöntem sağlamak için ek bir yenilik, böyle bir manyetik motor sistemine giriştir. - bir elektrik jeneratörü - bir paralel rezonans L-C devresi - devrede iki endüktans vardır - bobin 3'ten ve jeneratörün stator sargısından ve ek elektrik kapasitesinin sağlanması için jeneratörün 8 çıkış elektrik devresine ilave bir elektrik kondansatörün 17 eklenmesi elektrik kayıplarını azaltmak ve doğrudan jeneratörden 8 gelen istenen voltaj ve akım fazı ile alternatif akımla endüktansın 3 son derece basit kontrolü için kendi kendini uyarması ve ardından elektriksel L-C rezonansı.
Tam otonom mod ("perpetuum mobile") EMDG
Bu cihazın "sürekli hareket" modunda çalışmasını sağlamak için, gerekli EMD şaftı üzerinde bir elektrik jeneratörü üretimi için yeterli olan rotorun kalıcı mıknatıslarından serbest enerji elde edilmesi gerektiği oldukça açıktır. sistemin bu tamamen özerk çalışması için - elektrik. Bu nedenle, en önemli koşul, bu MD'nin manyetik rotorunun, elektrik jeneratörü tarafından şaftı üzerinde, elektromıknatıs bobinine güç sağlamak için fazlasıyla yeterli olan yeterli miktarda elektrik üretmesi için yeterli torkunun sağlanmasıdır. belirli bir değer ve rotorda PM bulunan bu tür elektromekanik sistemlerde çeşitli kaçınılmaz kayıpları telafi etmek için. PM 4 açıldıktan ve rotor 5 nominal devire ulaştıktan sonra, bobin 3'ün güç kaynağını doğrudan elektrik jeneratöründen veya ek bir voltaj dönüştürücü aracılığıyla değiştiririz ve marş güç kaynağı tamamen kapatılır veya yeniden şarj moduna alınır bu EMD'nin şaftındaki elektrik jeneratöründen.
BU MOTOR-JENERATÖRÜN “PPERP MOBİL” MODUNDA ÇALIŞMASI İÇİN GEREKLİ YAPISAL MONTAJ VE KONTROL ALGORİTMALARI
DM'nin "sürekli hareket" modunda çalışması için bu önemli koşul, ancak aynı anda en az altı koşulun karşılanması durumunda karşılanabilir:
1. PM'nin minimum boyutları ile böyle bir rotorun maksimum torkunu sağlayan MD'lerde modern güçlü niyobyum kalıcı mıknatısların kullanımı.
2. Elektromıknatıs sargısındaki son derece yüksek dönüş sayısı ve manyetik devresinin ve sargısının doğru ve verimli tasarımı nedeniyle MD statorunda etkili bir ultra düşük maliyetli MD elektromıknatıs devresinin kullanılması.
3. Anahtardan gelen elektromıknatıs bobinin güç kaynağı ile MD'yi başlatmak ve hızlandırmak için bir başlatma cihazı ve bir marş elektrik kaynağı ihtiyacı.
4. Elektromıknatıs sargısındaki elektrik akımını rotor PM'nin konumuna bağlı olarak yön, büyüklük olarak kontrol etmek için doğru algoritma.
5. elektrik jeneratörünün elektrik parametrelerinin koordinasyonu ve elektromıknatısın sargısı.
6. Elektromıknatıs sargısının güç kaynağı devresinde elektrik jeneratörü devresi açıldığında ve elektrik başlatma kaynağı, örneğin AB, deşarj modundan aktarıldığında elektromıknatıs sargısının güç kaynağı devrelerini değiştirmek için doğru algoritma elektrik şarjı moduna.
ELEKTROMANYETİK BOBİNDEKİ ELEKTRİK AKIMINI EMD ROTOR PM'NİN KONUMUNA BAĞLI OLARAK DEĞİŞTİRMEK İÇİN ALGORİTMA (Şekil 1)
Rotorun bir devri başına EMD rotorunda bir çubuk mıknatıs varlığında bobindeki elektrik akımını değiştirmek için algoritmayı ele alalım (Şekil 3) Bu EMD'nin etkin çalışmasını sağlamak için (Şekil 1 tasarım) , rotor konumu ve sargı 3 stator elektromıknatıs 1'deki akım akış yönünün birleşik diyagramlarını kullanarak, elektromıknatıs 1 EMD'yi kontrol etmek için doğru algoritmanın özü, PM rotorunun bir tam devri olmasıdır. elektromıknatısın endüktif sargısındaki (3) elektrik akımı iki tam salınım yapar .. Başka bir deyişle, elektriğin frekansı Elektromıknatısın (1) sargısına (3) verilen akım, kendisine bağlı bir elektronik anahtar vasıtasıyla kontrol edilir rotor PM konum sensörlerinin komutlarıyla, rotor hızının iki katına eşittir ve bu elektrik akımının fazı, rotor PM konumu ile kesinlikle senkronize edilir. EMD. Anahtar, sarım 3'teki akımın yönünü değiştirdiğinden (akım ters), PM'nin manyetik kutupları ve manyetik devrenin uçlarının manyetik kutupları çalışma boşluğunda çakıştığında kesinlikle PM'nin manyetik ekvatorunda meydana gelir. elektromıknatısın 1 manyetik devresi 2, daha sonra, sonuç olarak, rotorun PM'sinin bir tam devri için, sürekli olarak hızlanan tek yönlü tork ve manyetik devrenin uçlarının zıt manyetik kutuplarının çekiminden iki kez deneyimler. rotorun elektromıknatısı ve PM'si ve iki kez - benzer manyetik kutuplarının manyetik itme kuvvetleri nedeniyle.
Şekil 4 Rotor PM'nin bir devri için stator elektromıknatısının sargısındaki akımı tersine çevirmek için bir elektronik anahtarın çalışmasının zamanlama şeması
Şekil 5 EMDG rotorunun PM'sinin bir devri için bir elektromıknatısın boşluğundaki manyetik kutupların değişiminin siklogramı
Elektromıknatıs EMD algoritmasının açıklamasına:
3.4 - elektromıknatısın 1 ark manyetik devresinin 2 uçlarının manyetik kutupları
Sargılı 3 bobin, elektromıknatısın 1 manyetik devresi 2 üzerine yerleştirilir.
9. rotor mıknatısı