توصيل مقياس سرعة الدوران إلى اردوينو. مقياس سرعة الدوران على أساس اردوينو. إخراج البيانات إلى شاشة LCD HD44780 باستخدام اردوينو
يعد مقياس سرعة الدوران أداة مفيدة لحساب عدد الدورات في الدقيقة (الثورات في الدقيقة) للعجلة أو أي شيء يدور. أسهل طريقة لصنع مقياس سرعة الدوران هي استخدام جهاز إرسال واستقبال الأشعة تحت الحمراء. عندما ينقطع الاتصال بينهما، تعلم أن شيئًا ما يدور ويمكنك استخدام الكود لحساب عدد الدورات في الدقيقة بناءً على تكرار انقطاع الاتصال.
تحظى الأنظمة الموثوقة لمراقبة وتشخيص الآلات التي تحتوي على إشارات إدخال القياس الصحيحة بتقدير كبير. مقياس سرعة الدوران هو جهاز يقيس عدد الدورات في الدقيقة للمحرك أو دوار التوربين. يتم استخدامها لتتبع السرعات التي لدينا أثناء عملية التدريب، والتي ستسمح لنا بمعرفة ما إذا كانت تعمل كما هو متوقع. باستخدام هذا النوع من الأدوات، نتجنب توقف المعدات ونتمكن من إجراء الصيانة في الوقت المناسب. ويمكن استخدامه أيضًا لمعرفة المسافات التي تقطعها العجلات أو التروس أو الخطوط. يعتمد هذا العمل بشكل أساسي على تنفيذ جهاز يمكن من خلاله ملاحظة التحكم في المحرك وقياس سرعته باستخدام مقياس رقمي. والسبب في هذا النوع من التحويل هو أنه من الأسهل بكثير نقل وفك تشفير سلسلة من النبضات بدقة مقارنة بالتحويل إشارة تناظريةوخاصة إذا كانت المسافة التي يجب أن تنتقل عبرها الإشارة طويلة وصاخبة. في هذه الحالات، سيتم وضع محول التردد إلى الجهد في نهاية خط النقل لإنتاج إشارة تناظرية مرة أخرى. التطبيق الأكثر شيوعًا لمحولات التردد والجهد هو قياس سرعة المحرك، حيث يتم إنشاء سلسلة من النبضات المتناسبة مع سرعة المحرك في إشارة تناظرية يجب قياسها وربما استخدامها أيضًا للتحكم في السرعة. الخطية لهذا الجهد عادة ما تكون 3% من النطاق الكامل. ولهذا السبب، فإنه لا يتعارض مع معادلة مقياس التحويل. يقوم المدخل التناظري بتحميل العينة ويحتفظ بها في مكثف. إشارة الخرج التي تم أخذ عينات منها وتخزينها في مكثف هي مدخلات المحول. يقوم المحول بعد ذلك بإنشاء نتيجة رقمية على المستوى التناظري باستخدام تقديرات تقريبية متتالية. هذه السجلات هي: سجل النتائج العليا سجل النتائج المنخفض سجل التحكم 0 سجل التحكم 1 6 بتات 6-4: غير مطبق، تقرأ كـ دورة التشغيل للإشارة الدورية هي العرض النسبي لجانبها الموجب بالنسبة إلى الفترة. في المحركات، يعد تعديل عرض النبض تقنية تستخدم للتحكم في سرعة دوران الحث الكهربائي أو المحركات غير المتزامنة. يحافظ على عزم دوران ثابت ولا يسمح بالهدر الطاقة الكهربائية. تختلف أنظمة التحكم في السرعة الأخرى الجهد الكهربائي، تقليل عزم دوران المحرك؛ أو لصق المقاومة الكهربائيةوبالتالي فقدان الطاقة على شكل حرارة في هذه المقاومة. 10. منذ بضعة أسابيع، فتحنا سلسلة من المنشورات حول أجهزة الاستشعار، وكان أول منشور وصلنا إليه هو.
في هذه المقالة، سننظر في كيفية استخدام جهاز إرسال واستقبال الأشعة تحت الحمراء لصنع مقياس سرعة الدوران باستخدام Arduino. يتم عرض النتيجة على شاشة LCD مقاس 16 × 2.
الهدف من هذا المشروع هو إنشاء نظام بمدخل واحد ومخرج واحد. توجد عند مدخل الجهاز إشارة تتغير من المستوى العالي (+5V) إلى المستوى المنخفض (+0V) عند انقطاع الاتصال. وفقا لهذه الإشارة، سوف يقوم اردوينو بزيادة قيمة العداد الداخلي. ثم يتم تنفيذها معالجة إضافيةوالحساب، وعندما ينقطع الزناد، سيتم عرض عدد الدورات في الدقيقة المحسوب على شاشة LCD.
جهاز استشعار غير مكلف للغاية وله تطبيقات مثيرة للاهتمام. يعد هذا المستشعر رائعًا لاكتشاف العوائق أمامك وله العديد من التطبيقات في مجال الروبوتات. لقد رأينا بالفعل أنه يستخدم لإنشاء أتباع الروبوتات الخطية، وكذلك في روبوتات معركة السومو لتجنب مغادرة ساحة المعركة. وفي كلتا الحالتين عاكس جهاز استشعار بصرييستخدم للكشف عن خطوط العلامات التي تحدد المسار الذي يجب أن يتبعه الروبوت أو حدود ساحة المعركة.
يحتوي على مكونين متصلين بمدخل بلاستيكي. عمله مشابه جدًا لعمل الترانزستور، فهو يحتوي على مُجمع وباعث والقاعدة هي ما يتم تنشيطه في هذه الحالة بعد استقبال شعاع الضوء بالأشعة تحت الحمراء. لذا فإن هذين المكونين يعملان معًا. يرجى ملاحظة أن لون الجسم ومادته قد يؤثران على أداء المستشعر. وهناك مواد تعكس ضوءاً أقل من غيرها. ومن الأمثلة على ذلك الأجسام السوداء، وهي ليست عاكسات جيدة، خاصة إذا كان سطحها غير أملس.
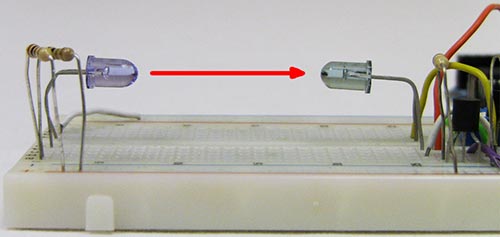
للاتصال، سنستخدم شعاع الأشعة تحت الحمراء من مصباح LED IR متصل عبر مقاومة منخفضة المقاومة بحيث يتوهج بشكل ساطع. سنستخدم الترانزستور الضوئي كجهاز استقبال، والذي "يُغلق" في حالة عدم وجود ضوء من مصباح LED بالأشعة تحت الحمراء. سيتم وضع مروحة كمبيوتر بين جهاز إرسال واستقبال الأشعة تحت الحمراء وتشغيلها. سوف يقوم مستقبل الأشعة تحت الحمراء المتصل عبر دائرة ترانزستور بتوليد المقاطعات. لإخراج سيتم استخدام النتيجة اردوينو شاشات الكريستال السائلواجهة حتى نتمكن من عرض قيمة RPM النهائية على شاشة LCD.
الأنود LED LED الكاثود جامع الترانزستور الضوئي باعث الترانزستور الضوئي. لهذا المشروع سوف تحتاج إلى المكونات التالية. يبدو مخطط الاتصال هكذا. كما ترون هذا هو جدا دائرة بسيطة. تستخدم أجهزة استشعار تأثير هول للكشف عن قرب المغناطيس. يمكن استخدامها أيضًا كجهاز استشعار للموضع، وجهاز تشفير، واكتشاف الدوران.
في البداية، ركز الاستخدام الأول لهذا الاكتشاف على التصنيف الدوري العناصر الكيميائية. تم استخدام مستشعرات تأثير هول لقياس المجالات المغناطيسية الثابتة أو الساكنة، ولكنها تطلبت أن يكون المستشعر في حالة حركة. أدى هذا إلى إنشاء ما نسميه اليوم بشكل كلاسيكي محوّل تأثير هول للإخراج الرقمي.
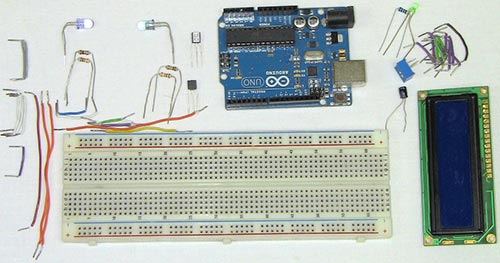
عناصر:
مجلس التنمية
المقاوم الانتهازي 5 كيلو أوم
صداري
موصلات SIP
2 × 2N2222 ترانزستور NPN
الصمام بالأشعة تحت الحمراء
الترانزستور الضوئي
مقاومة 10 أوم
المقاوم 100 كيلو أوم
المقاوم 15 كيلو أوم أو 16 كيلو أوم
مروحة الكمبيوتر
قائمة مفصلة بالعناصر
جميع العناصر المستخدمة في المشروع مذكورة أعلاه، لكنني سأصف وظائف العناصر الرئيسية بمزيد من التفصيل.
التطور المستمر لتقنية محولات Hall، مع الأخذ في الاعتبار تطور مكونات العنصر الواحد إلى مكونات متعامدة مكونة من عنصرين. تم القيام بذلك لتقليل فرق جهد القاعة عبر المحطات الطرفية. أدى التقدم التالي إلى إنشاء محولات تربيعية مكونة من أربعة عناصر. يتم ترتيب هذه العناصر الأربعة بشكل متعامد في تكوين الجسر. جميع أجهزة استشعار السيليكون هذه مصنوعة من مركبات ثنائية القطب.
وهذا يجعل من الممكن تقليل فرق الخطأ المحتمل عند إدخال مكبر الصوت التشغيلي. جميع الأخطاء التي تحدث في الدوائر غير المستقرة تؤدي إلى أخطاء التبديل أو الاختلافات المحتملة أو اكتساب الأخطاء عند حساس الإخراج الخطي. تقضي هذه الآلية على الاختلافات المحتملة في التداخل النموذجي في عناصر تأثير هول لأشباه الموصلات. كما أنه يعوض درجة الحرارة والتحريض الناجم عن الاختلافات في الطفيليات المحتملة.
اردوينو أونو
هذا لوحة اردوينووالتي سنستخدمها لمعالجة النبضات الناتجة عن انقطاع شعاع الأشعة تحت الحمراء، والتي تبلغ عن وجود شفرة مروحة الكمبيوتر بين جهاز الاستقبال والمستشعر. سيستخدم Arduino هذه النبضات مع جهاز توقيت لحساب عدد الدورات في الدقيقة للمروحة.
ال سي دي 16×2
بمجرد قيام Arduino بحساب عدد الدورات في الدقيقة، سيتم عرض هذه القيمة على الشاشة بطريقة سهلة الاستخدام.
كل هذه التحسينات تؤدي إلى أجهزة استشعار موثوقة لتأثيرات هول. سيشهد المستقبل أجهزة استشعار قابلة للبرمجة لإنشاء أجهزة استشعار ذكية. لا يتم تنشيط مستشعر تأثير Hall في حالة عدم وجوده المجال المغنطيسيويتم تفعيله في وجود مجال مغناطيسي، كما هو موضح في الشكلين التاليين.
لا يؤثر المجال المغناطيسي للأرض على مستشعر تأثير هول. يمكن لبعض مغناطيس الثلاجة توفير مجال مغناطيسي كافٍ لتنشيط المستشعر. يكون المستشعر غير نشط في حالة عدم وجود مجال مغناطيسي. ولذلك لا يحدث شيء إذا كان القطب الشمالي للمغناطيس هو الذي يمر أمام جزء الاستشعار.
المقاوم الانتهازي 5 كيلو أوم
سيتم استخدام أداة التشذيب هذه لضبط تباين شاشة LCD مقاس 16 × 2. إنه يوفر جهدًا تناظريًا يتراوح من 0 إلى +5 فولت، مما يسمح لك بضبط سطوع شاشة LCD.
الأشعة تحت الحمراء LED والترانزستور الضوئي
يتم تشغيل الترانزستور الضوئي عندما يضربه ضوء الأشعة تحت الحمراء القوي. لذلك عندما يضيء مصباح IR LED، فإنه يبقي الترانزستور الضوئي مفتوحًا، ولكن إذا كان مصباح IR LED مغطى بشفرة مروحة، على سبيل المثال، فسيتم إغلاق الترانزستور الضوئي.
يستخدم المستشعر مقاومة السحب. هذا يعني أنه عندما لا يتم تنشيطه، فإن جهد الطرف 3 من المستشعر يطابق جهد المقاومة. خلاف ذلك، سيتم تطبيق التوتر من خلال مقاومة السحب. إليك معاينة فيديو صغيرة للنتيجة.
وفيما يلي بعض الأمثلة على كيفية تنفيذ هذا المكون الممتاز. يوضح الرسم البياني أدناه التغير في المجال المغناطيسي كدالة للمسافة. في الرسم البياني، يتم التعبير عن المسافة بأجزاء من الألف من البوصة. لذلك يتم تنشيط المستشعر. تم تعطيل المستشعر.
2N3904 و 2N3906
تُستخدم هذه الترانزستورات لتحويل مستوى الإشارة من أجل توفير نبضات الخرج من الترانزستور الضوئي إلى الاردوينو، حيث لا يوجد جهد آخر غير +0 و +5V.
رسم تخطيطي
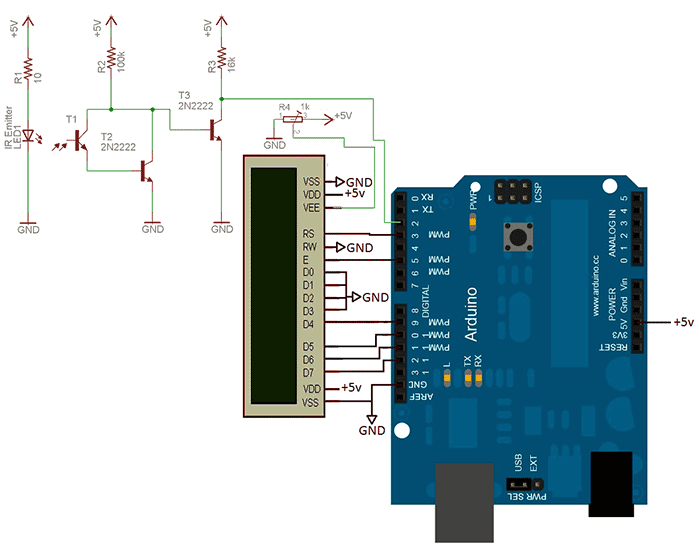
في الدائرة، تم تبسيط واجهة الاتصال مع شاشة LCD وتحتوي على خطي تحكم و4 خطوط بيانات فقط.
يمكن تحقيق محرك غير مرئي أو مغلق باستخدام مستشعر تأثير Hall. يمكن إغلاق المستشعر في حاويات لاستخدامه في الوسائط مثل الماء والزيت وما إلى ذلك. من الضروري فقط أن تكون الحاوية منفذة للمجال المغناطيسي.
انقطاع الدوران المغناطيسي
وبالتالي فإن المستشعر نشط. في الشكل. مستشعر 5V غير نشط لأن المجال المغناطيسي محجوب بواسطة عائق حديدي. يمكن تضمين المستشعر كمفتاح في سرعة الدوران أو تحديد الموقع. بين النافذتين، يحجب الجزء المعدني المجال المغناطيسي، وبالتالي يكون مستشعر تأثير هول غير نشط.
ميزات المخطط
واجهة LCD مقاس 16×2
يتم توصيل 2 دبابيس تحكم و 4 لنقل البيانات من Arduino إلى شاشة LCD. هذا هو ما يخبر شاشة LCD بما يجب القيام به ومتى يتم ذلك.
دائرة كسر شعاع الأشعة تحت الحمراء
تنتقل إشارة كسر شعاع الأشعة تحت الحمراء إلى الرقمية الثانية اردوينو دبوس. يؤدي هذا إلى مقاطعة Arduino، مما يسمح له بحساب النبض والسماح لمقياس سرعة الدوران باستقبال البيانات.
يعد هذا مبدأ مقبولًا على نطاق واسع في بدء تشغيل السيارات والعمليات الصناعية حيث تعد المعرفة الدقيقة بالموقع عنصرًا حاسمًا. مستشعر تنشيط المجال المغناطيسي الدوار في الشكل. يستخدم الشكل 7 عادةً لقياس سرعة الدوران لمزامنة النبضات مع الموضع. يتم تنشيط المستشعر عن طريق تدوير المغناطيس. ينطفئ المستشعر عندما يمر القطب الشمالي للمغناطيس أمام المستشعر.
مغناطيس دائري صلب كما هو موضح في الشكل. 7A يسمى حلقة مغناطيسية. تحتوي الحلقة المغناطيسية على قطبين شمالي وجنوبي متناوبين. يمكن أن يحتوي هذا النوع من المغناطيس على قطبين مغناطيسيين مع 36 قطبًا مغناطيسيًا. يوضح الرسم البياني أدناه العبور بين القطبين الشمالي والجنوبي على مسافات مختلفة.
مكتبة اردوينو LCD
في هذا المشروع سوف نستخدم مكتبة Arduino LCD. سنقوم فقط بتحديث قيمة RPM في السطر الثاني إلى القيمة الجديدة.
للتحضير، قم بإلقاء نظرة على الكود الموجود أدناه، والذي يستخدم هذه المكتبة لعرض "Hello, World!" في مقياس سرعة الدوران سوف نستخدم رمزًا مشابهًا، خاصة: "lcd.print(millis()/1000);".
كشف المستوى - الحركة
لاحظ أن نقطة الانتقال متشابهة بالفعل بغض النظر عن المسافة بين المستشعر والمغناطيس. يتم تعليق مغناطيس منفصل فوق المستشعر. يتم تنشيط المستشعر بمجرد أن يصبح التجميع غير مستوي. يمكن استخدام مستشعر تأثير Hall مع مغناطيس كهربائي لتوفير مستشعر تيار عالي الكفاءة ومعزول. يمكن استخدام هذا لحماية المكونات من التلف الناتج عن التحميل الزائد.
المكونات الوحيدة المطلوبة هي مستشعر تأثير هول وحلقي من الفريت. تُعرف أجهزة قياس التدفق أيضًا باسم مقياس التدفق، وعادةً ما تستخدم أجهزة استشعار تأثير هول. يقيسون تدفقات السائل والغاز. والأخيرة تحظى بتقدير كبير في الوسط، كما يقول "الجو المتفجر".
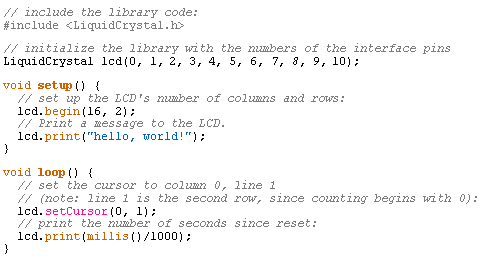
افهم وظائف مكتبة شاشات الكريستال السائل هذه بأكبر قدر ممكن من التفاصيل قبل المضي قدمًا. إنها ليست معقدة للغاية وموثقة جيدًا على موقع Arduino الإلكتروني.
حساب دورة في الدقيقة باستخدام اردوينو
نظرًا لأننا سنقوم بحساب عدد الدورات في الدقيقة لمروحة الكمبيوتر، فيجب أن نفهم أننا نستخدم مقاطعة شعاع الأشعة تحت الحمراء في الحساب. وهذا أمر مريح للغاية، ولكن يجب أن نأخذ في الاعتبار أن مروحة الكمبيوتر تحتوي على 7 شفرات. وهذا يعني أن 7 انقطاعات تساوي ثورة واحدة.
لا اتصال = لا شرارة = لا انفجارات! يمكنك أيضًا استخدام التأثير الطارد للمغناطيس الثاني لتجنب استخدام الزنبرك. تطبيق أساسي آخر هو اكتشاف المستوى. كما هو مبين في الصورة أدناه، النظام الهيدروليكييتحرك حتى يصل إلى موضع معين.
يمكن أن يكون هذا مفيدًا جدًا في التطبيقات الآلية حيث تكون الدقة الموضعية في غاية الأهمية. أسنان الترس هي في الواقع وسيلة تتغير فيها الموصلية المغناطيسية اعتمادًا على موضع العجلة. ويوضح الرسم البياني أدناه هذا التغيير في المجال المغناطيسي بشكل واضح للغاية.
إذا كنا نتتبع المقاطعات، فنحن بحاجة إلى معرفة أن كل مقاطعة سابعة تعني حدوث دورة واحدة كاملة للتو. إذا قمنا بتتبع الوقت الذي يستغرقه إكمال الدورة، فيمكننا بسهولة حساب عدد الدورات في الدقيقة.
وقت الثورة الأولى = P * (μS/الثورة)
دورة في الدقيقة = دورة في الدقيقة = 60,000,000 * (ميكروسيمنز/دقيقة) * (1/P) = (60,000,000 / ف) * (دورة في الدقيقة)
لاحظ أن مستشعر تأثير هول يوضع بين السن والمغناطيس. يمكن أيضًا استخدام مستشعرات تأثير هول للكشف الدقيق عن دوران المحركات بدون فرش ومراقبتها. وفي جميع الأحوال، يجب عليك أيضًا الحصول على موافقة صاحب حقوق الطبع والنشر الأصلي.
جميع الحقوق في المواد الخاصة بهم مملوكة لهم. يعمل عداد النبض على حساب النبضات الكهربائية القادمة من أجهزة الاستشعار، أي تحديد الكمية على أساس وحدة زمنية. عادة ما تكون المستشعرات عبارة عن تاكوغرافات حركية أو مستشعرات موضعية. أجهزة في الروبوتات لتحديد الطريق والاتجاه.
لحساب RPM سوف نستخدم الصيغة المذكورة أعلاه. الصيغة دقيقة، وتعتمد الدقة على مدى قدرة Arduino على تتبع الوقت بين المقاطعات وحساب عدد الدورات الكاملة.
تجميع الدائرة
في الصورة أدناه يمكنك رؤية كل شيء التفاصيل الضروريةوالقافزات كما في الرسم التخطيطي.
يمكن استخدام عدد النبضات لحساب الأشخاص الذين يدخلون غرفة أو معرضًا. هناك عدادات طاقة تصدر نبضات تتناسب مع الواط المستهلك. حاليًا، يمكن أيضًا أن تحتوي عدادات المياه والغاز على مخرجات نبضية لحساب الاستهلاك.
كيف يعمل عداد النبض؟
توجد مقاييس فرق الجهد مع مستشعر دوران داخلي لضبط موضعها. يمكن تقسيم عدد النبضات إلى ثلاثة أجزاء رئيسية على الأقل. يمكن تصحيح القاعدة الزمنية بوقت محدد أو الخلود. كل نبضة تزيد من العداد، مما يزيد من العدد المخزن. عند انقضاء الحد الأقصى لوقت العد، يظهر الرقم على شاشة العرض أو أي جهاز عرض آخر. تتم إعادة ضبط العداد والمؤقت وحساب النبضات الواردة.
أولاً، قم بتوصيل +5V وخطوط البيانات/التحكم الخاصة بشاشة LCD. ثم شاشة LCD ومقياس جهد التباين ومصباح الطاقة LED.
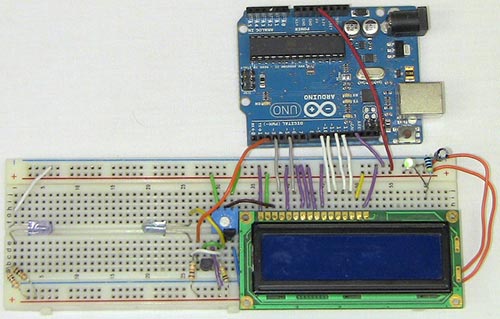
يتم تجميع قاطع الدائرة لشعاع الأشعة تحت الحمراء. حاول الحفاظ على مسافة بين مؤشر LED IR والترانزستور الضوئي. توضح هذه الصورة المسافة بين مصباح IR LED والترانزستور الضوئي حيث سأضع مروحة الكمبيوتر.
ما يكفي من الحديث عن الأجهزة! لنبدأ في تنفيذ البرنامج الثابت/البرنامج لنرى كيف يعمل الجهاز!
جزء البرمجيات
هناك جزأين رئيسيين من الكود، كما هو موضح ومفصل أدناه:
دورة تحديث شاشات الكريستال السائل الأساسية
تحديث وقت المقاطعة
في الدورة الرئيسية، يتم حساب الثورات والتحديثات لشاشة LCD. نظرًا لأن الحلقة الرئيسية عبارة عن حلقة while(1) عملاقة، فستكون قيد التشغيل دائمًا، وسيتم حساب عدد الدورات في الدقيقة، وسيتم تحديث شاشة LCD عدة مرات في الثانية. تقوم الوظيفة الموجودة في المقاطعة بحساب الوقت بين مقاطعات الأشعة تحت الحمراء، بحيث يمكنك حساب عدد الدورات في الدقيقة في الحلقة الرئيسية.
تذكر أن مروحة الكمبيوتر تحتوي على 7 شفرات، لذا فإن مقياس سرعة الدوران هذا مصمم للعمل مع تلك المراوح فقط. إذا كانت مروحتك أو أي جهاز آخر ينتج 4 نبضات فقط في كل دورة، فقم بتغيير الرمز إلى "(الوقت*4)".
إليك مقطع فيديو توضيحي لكيفية عمل مقياس سرعة الدوران.
تعمل المروحتان بسرعة 3000 دورة في الدقيقة و2600 دورة في الدقيقة تقريبًا، مع وجود خطأ يبلغ حوالي +/- 100 دورة في الدقيقة.
مراجعة مقياس سرعة الدوران على اردوينو
تولد المروحة نبضات متقطعة، وعند الإخراج نرى عدد الدورات في الدقيقة. على الرغم من أن الدقة ليست 100%، ولكن حوالي 95%، مع تكلفة العناصر التي تبلغ 10 دولارات، فمن المنطقي بناء مقياس سرعة الدوران هذا على Arduino.
ماذا تفعل الآن؟
تعتبر الأنظمة القائمة على كسر الشعاع مفيدة ليس فقط لقياسات RPM، ولكن أيضًا كأجهزة استشعار أخرى. على سبيل المثال، تريد معرفة ما إذا كان الباب مفتوحًا أم مغلقًا. ربما تريد معرفة ما إذا كان هناك شيء ما يمر تحت الروبوت. هناك العديد من الاستخدامات لكسر الشعاع، والدائرة المستخدمة هنا بسيطة للغاية بحيث توجد طرق عديدة لتحسينها وبناء أجهزة أخرى مذهلة.
خاتمة
بشكل عام، أنا أعتبر هذا المشروع ناجحًا... لكنها مسألة وقت وخبرة.. بطريقة أو بأخرى، يعمل النظام كما هو مقصود وبشكل موثوق تمامًا، وقد حصلنا على النتيجة المتوقعة. أتمنى أن تستمتع بقراءة هذا المقال وتعلم كيفية صنع مقياس سرعة الدوران الخاص بك باستخدام Arduino!
المقال الأصلي على إنجليزي(ترجمة: الكسندر كاسيانوفلموقع cxem.net)
مستشعر سرعة الدوراننادي كرة القدم. -03
وحدة استشعار السرعة أو حركة خطية. نوع الوحدة FC-03. إنه مصمم للتحكم في المعلمات الميكانيكية للأجزاء المتحركة للآليات المختلفة للأغراض المنزلية والتعليمية. عند تثبيته في المنصات الأساسية للروبوتات الصغيرة، فإنه يسمح لك بتجميع أنظمة التحكم في المحركات والتحكم في حركة الجسم.
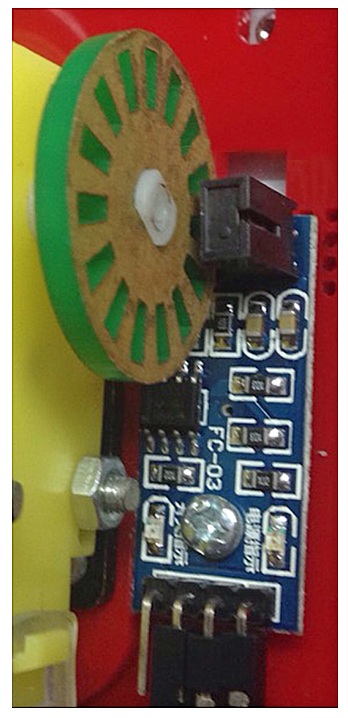
تركيب مستشعر سرعة الدوران FC-03 على هيكل الروبوت ذو العجلات.
صفات
مصدر الطاقة 3.3 - 5 فولت
عرض الخلوص للقرص المشقوق 5 مم
أبعاد الوحدة 38 × 14 × 7 ملم
فتحة تركيب لبرغي 3 مم
اتصالاتFC-03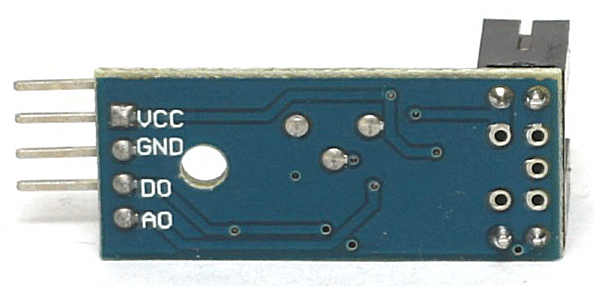
يتم وضع علامة على جهات الاتصال على السبورة.
VCC - مصدر الطاقة.
أرض- سلك مشترك، إمدادات الطاقة السلبية.
افعل - إخراج إشارة النبض.
AO - الإخراج المباشر من optocoupler ITR9608.
مبدأ التشغيل
عنصر الاستشعار للوحدة هو زوج بصري ITR9608. يوجد في أحد نتوءات الجسم مصباح LED يعمل بالأشعة تحت الحمراء موجه إلى الترانزستور الضوئي الموجود في النتوء الآخر. إذا تم إدخال لوحة معتمة في الفجوة بين النتوءات، فسيتم حظر إشعاع الأشعة تحت الحمراء الصادر عن مؤشر LED ويتم إغلاق الترانزستور الضوئي. يُطلق على هذا المكون أحيانًا اسم photointerrupter، ولكنه يكتشف الانقطاع فقط تدفق مضيئة. كما هو موضح في الرسم البياني، تدخل الإشارة من باعث الترانزستور إلى دائرة الجهاز.
يتم حجب الضوء بواسطة لوحة متصلة بالجزء المتحرك من الآلية التي يتم التحكم فيها. باستخدام المستشعر، يتم تحديد الحركة إلى المواضع القصوى للمستوى المتحرك عند دخول العنصر الهيكلي المرتبط به إلى المستشعر. يقومون بقياس معلمات الدوران للأجزاء الميكانيكية المختلفة. هذه هي الطريقة التي يتم بها تحويل المعلمات الميكانيكية إلى الكميات الكهربائيةومزيد من قيم البرنامج.
يستخدم مستشعر سرعة الدوران FC-03 لقياس سرعة الدوران. لا يمكن استخدامه لتحديد اتجاه الدوران. يتم تثبيت قرص به ثقوب على عمود المحرك أو علبة التروس. تحتوي وحدة optocoupler على فتحة بعرض 5 مم. عندما يدور القرص، كما هو موضح في الرسم المتحرك، تتناوب الثقوب وأجزاء اللوحة باستمرار في الفتحة. يقوم المستشعر بتحويل تناوب عناصر القرص إلى نبضات كهربائية. تجعل إلكترونيات الوحدة إشارة المستشعر مناسبة للإدراك الرقمي رقائق المنطقأو متحكم.
مخططنادي كرة القدم.-03
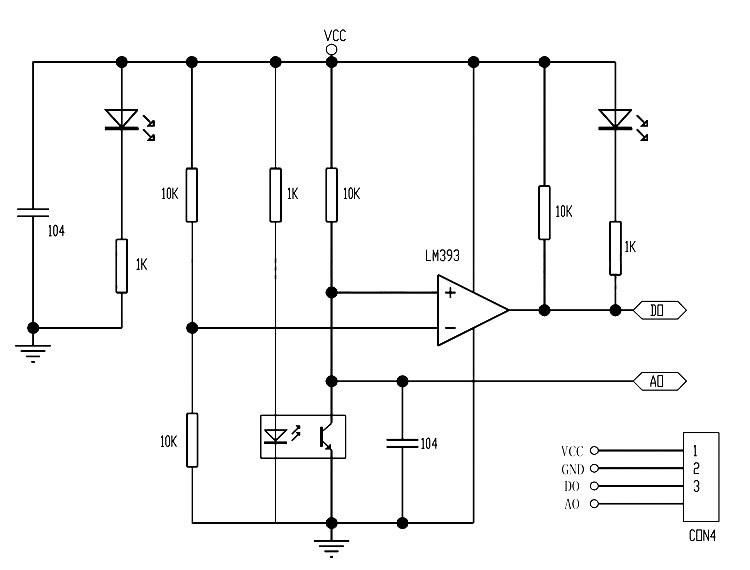
تنتقل الإشارة من ITR9608 إلى مدخل المقارنة LM393، ومن خرجها إلى الطرف D0 ويذهب مؤشر LED إشارة رقميةتتكون من مستويات المنطق العالية والمنخفضة. تأتي إشارة الإخراج A0 مباشرة من ITR9608 دون التحويل إلى المستويات المنطقية. يتيح لك استخدام المقارنة LM393 الحصول على حواف نبضية ناعمة وزيادة الحمل الحالي لمخرج المستشعر بشكل طفيف؛ قم بتثبيت مؤشر LED في الدائرة يشير إلى حالة الإخراج.
إشارة
هناك 2 المصابيح على متن الطائرة. يُظهر أحدهما تفعيل مستشعر سرعة الدوران FC-03، والآخر يُظهر عدم وجود عائق في المستشعر. عند تشغيل الجهاز لأول مرة، يجب أن يضيء كلا مؤشري LED. عند إدخال لوحة معدنية في مساحة حرةالكسارة، يجب أن يخرج LED واحد.
طلب
باستخدام المستشعر، لا يمكنك قياس سرعة الدوران والتسارع فحسب، بل يمكنك أيضًا قياس المسافة التي يقطعها الروبوت ذو العجلات، وتسجيل عمر المحرك المستهلك. ومن المهم بشكل خاص التحكم في سرعة دوران العجلات عندما يتم قيادة كل عجلة بواسطة محركها الخاص. بالنسبة للحركة في خط مستقيم، يجب أن تكون سرعات دوران جميع العجلات متساوية، وعند الدوران، يجب اتباع خوارزمية نظام التحكم.
أثناء دوران القرص، يعبر عدد معروف من الثقوب فتحة المستشعر في دورة واحدة. من خلال حساب عدد الثقوب، يمكنك تحديد دورة واحدة للعجلة أو، على سبيل المثال، 15.5 دورة. ومن خلال قياس عدد الدورات لكل وحدة زمنية، نحصل على تردد دوران العجلة، وبالتالي سرعة الجسم. بناءً على إشارات المستشعر والحصول على القيمة الدقيقة للفواصل الزمنية، يقوم الجهاز بحساب معلمات الحركة. استخدام وحدة التحكم الدقيقة مناسب هنا.
يتيح لك برنامج Arduino التالي تحديد عدد الدورات في الدقيقة ويعرض النتائج في نافذة المحطة التسلسلية.
#define PIN_DO 2 // اضبط الدبوس المستخدم في Arduino
نبضات كثافة العمليات غير الموقعة؛
تعويم دورة في الدقيقة.
غير موقعة منذ وقت طويل؛
#تعريف_HOLES_DISC 15
عداد باطلة ()
{
نبضات++;
}
الإعداد الفارغ ()
{
Serial.begin(9600);
pinMode(PIN_DO, INPUT);
البقول = 0؛
timeOld = 0;
}
حلقة باطلة ()
{
إذا (مللي () - الوقت القديم> = 1000)
{
detachInterrupt(digitalPinToInterrupt(PIN_DO));
دورة في الدقيقة = (نبضات * 60) / (HOLES_DISC)؛
Serial.println(دورة في الدقيقة);
TimeOld = ميلي ()؛
البقول = 0؛
AttachInterrupt(digitalPinToInterrupt(PIN_DO), counter, FALLING);