Moteur-générateur électromagnétique perpétuel
Cet article est consacré au développement et à la description du principe de fonctionnement, des conceptions et du circuit électrique d'un moteur-générateur électromagnétique "perpétuel" original simple d'un nouveau type avec un électroaimant sur le stator et un seul aimant permanent (PM) sur le rotor, avec la rotation de ce PM dans l'entrefer de cet électroaimant.
MOTEUR-GÉNÉRATEUR ÉLECTROMAGNÉTIQUE PERPÉTUEL AVEC ÉLECTROAIMANT SUR STATOR ET AIMANT SUR ROTOR
1. Introduction
2. Quelle quantité d'énergie est cachée dans un aimant permanent et d'où vient-elle ?
3. Bref examen des moteurs et générateurs électromagnétiques avec PM
4. Description de la conception et de l'électricité du moteur-générateur électromagnétique modernisé avec un électroaimant à courant alternatif
5. Moteur électromagnétique réversible avec PM externe sur le rotor
6. Description des travaux du moteur-générateur électromagnétique "perpétuel"
7. Noeuds nécessaires et algorithmes de contrôle pour le fonctionnement de ce moteur-générateur électromagnétique en mode "mouvement perpétuel"
8. Algorithme pour le courant électrique inverse dans l'enroulement de l'électroaimant en fonction de la position du champ magnétique
9. Sélection et calcul des éléments et équipements pour EMDG
10. Électroaimant EMD à faible coût (bases de conception et de calcul)
11. Le bon choix des aimants permanents du rotor EMD
12. Le choix d'un générateur électrique pour le prototypage EMDG
13. Moteur-générateur électromagnétique à obturateur perpétuel
14. Moteur électromagnétique perpétuel sur un compteur électrique à induction conventionnel
15. Comparaison des performances énergétiques du nouvel EMDH avec des analogues
16.Conclusion
INTRODUCTION
Le problème de la création de machines à mouvement perpétuel pendant de nombreux siècles excite l'esprit de nombreux inventeurs et scientifiques du monde entier et est toujours d'actualité.
L'intérêt pour ce sujet des "machines à mouvement perpétuel" de la part de la communauté mondiale est toujours énorme et croissant, à mesure que les besoins énergétiques de la civilisation augmentent et en relation avec l'épuisement imminent des combustibles organiques non renouvelables, et surtout en relation avec l'apparition du crise énergétique et environnementale mondiale de la civilisation. Pour construire la société de demain, il est bien sûr important de développer de nouvelles sources d'énergie qui puissent répondre à nos besoins. Et aujourd'hui, pour la Russie et de nombreux autres pays, c'est tout simplement vital. Dans la future reprise du pays et la crise énergétique à venir, de nouvelles sources d'énergie basées sur des technologies de pointe seront absolument nécessaires.
Les yeux de nombreux inventeurs, ingénieurs et scientifiques talentueux sont depuis longtemps rivés sur les aimants permanents (PM) et leur énergie mystérieuse et étonnante. De plus, cet intérêt pour les PM a même augmenté ces dernières années, en raison des progrès significatifs dans la création de PM forts, et en partie en raison de la simplicité des conceptions proposées de moteurs magnétiques (MF).
Quelle est la quantité d'énergie cachée dans un aimant permanent et d'où vient-elle ?
Il est évident que les PM compacts et puissants modernes contiennent une énergie latente importante du champ magnétique. Et le but des inventeurs et développeurs de tels moteurs et générateurs magnétiques est d'isoler et de convertir cette énergie latente des PM en d'autres types d'énergie, par exemple en énergie mécanique de la rotation continue du rotor magnétique ou en électricité. Le charbon lors de la combustion libère 33 J par gramme, le pétrole, qui dans 10-15 ans commencera à disparaître dans notre pays, libère 44 J par gramme, un gramme d'uranium donne 43 milliards de J d'énergie. Un aimant permanent contient théoriquement 17 milliards de joules d'énergie. pour un gramme. Bien sûr, comme pour les sources d'énergie conventionnelles, l'efficacité de l'aimant ne sera pas de cent pour cent, de plus, un aimant en ferrite a une durée de vie d'environ 70 ans, à condition qu'il ne soit pas soumis à de fortes charges physiques, thermiques et magnétiques, cependant , avec une telle quantité d'énergie contenue en lui énergie, ce n'est pas si important. De plus, il existe déjà en série des aimants industriels en métaux rares, dix fois plus résistants que ceux en ferrite et donc plus performants. Un aimant qui a perdu sa force peut simplement être "rechargé" avec un champ magnétique puissant. Cependant, la question "d'où vient tant d'énergie dans le PM" reste ouverte en science. De nombreux scientifiques pensent que l'énergie contenue dans les PM provient en permanence de l'extérieur de l'éther (vide physique). Et d'autres chercheurs affirment qu'il se produit simplement en lui-même en raison du matériau magnétisé du PM. Jusqu'à présent, il n'y a pas de clarté.
BREF APERÇU DES MOTEURS ET GÉNÉRATEURS ÉLECTROMAGNÉTIQUES CONNUS
Il existe déjà de nombreux brevets et solutions d'ingénierie pour diverses conceptions de moteurs magnétiques dans le monde - mais il n'y a pratiquement pas encore de tels DM fonctionnant en mode "mouvement perpétuel" dans la démonstration. Et jusqu'à présent, les moteurs magnétiques industriels (IM) «perpétuels» n'ont pas été créés et maîtrisés en série et ne sont pas introduits dans la réalité, et plus encore, ils ne sont pas encore en vente libre. Malheureusement, les informations bien connues sur Internet concernant les moteurs-générateurs magnétiques en série de Perendev (Allemagne) et d'Akoil-energy n'ont pas encore été confirmées dans la réalité. Les raisons possibles de la lenteur des progrès réels du métal en DM sont nombreuses, mais apparemment il y a deux raisons principales : soit en raison de la classification de ces développements, ils ne sont pas portés à la production de masse, soit en raison de la faible performance énergétique des échantillons industriels pilotes. de MD. Il convient de noter que certains problèmes de création de moteurs purement magnétiques avec des compensateurs mécaniques et des écrans magnétiques, par exemple des MD de type rideau, n'ont pas encore été entièrement résolus par la science et la technologie.
Classification et brève analyse de quelques DM connus
- Moteurs magnétiques magnéto-mécaniques Dudyshev/1-3/. Avec leur raffinement constructif, ils pourraient bien fonctionner en mode "mouvement perpétuel".
- Moteur MD Kalinina- DM alternatif inopérant avec un écran magnétique tournant - DM dû au compensateur à ressort non amené à la bonne solution de conception.
- Moteur électromagnétique "Perendev"- un moteur électromagnétique classique avec un PM sur le rotor et un compensateur, inopérant sans processus de commutation dans les zones où passent les points morts de maintien du rotor avec le PM. Deux types de commutation y sont possibles (permettant de passer le "point d'arrêt" du PM du rotor - mécanique et électromagnétique. Le premier réduit automatiquement le problème à une version bouclée de SMOT'a (et limite la vitesse de rotation, et d'où la puissance), la seconde est plus faible. Dans le "moteur perpétuel" ne peut pas fonctionner.
- Moteur électromagnétique Minato- un exemple classique de moteur électromagnétique avec un rotor PM et un compensateur électromagnétique qui assure le passage du rotor magnétique du « point de maintien » (selon Minato, le « point d'effondrement »). En principe, il ne s'agit que d'un moteur électromagnétique fonctionnant avec une efficacité accrue. L'efficacité maximale pouvant être atteinte est d'environ 100 % inutilisable en mode MD « perpétuel ».
- Moteur Johnson- un analogue du moteur électromagnétique Perendev avec un compensateur, mais avec une énergie encore plus faible.
- Moteur-générateur magnétique Shkondin- un moteur électromagnétique à PM, fonctionnant sur les forces de répulsion magnétique des PM (sans compensateur). Il est structurellement complexe, possède un ensemble collecteur-balais, son efficacité est environ 70-80 %. Inutilisable en mode MD éternel.
- Moteur-générateur électromagnétique Adams- c'est en fait le plus avancé de tous connus - un moteur-générateur électromagnétique qui fonctionne comme le moteur-roue de Shkondin, uniquement sur les forces de répulsion magnétique du PM depuis les extrémités des électroaimants. Mais ce moteur-générateur à base de PM est structurellement beaucoup plus simple que le moteur-générateur magnétique de Shkondin. En principe, son efficacité ne peut approcher que 100%, mais uniquement si l'enroulement de l'électroaimant est commuté par une courte impulsion de haute intensité provenant d'un condensateur chargé. Inutilisable en mode MD "éternel".
- Moteur électromagnétique Dudyshev. Moteur électromagnétique réversible avec rotor magnétique externe et électro-aimant central du stator). Son efficacité n'est pas supérieure à 100% en raison de l'ouverture du circuit magnétique /3/. Cet EMD a été testé en fonctionnement (la photo de l'implantation est disponible).
D'autres EMD sont également connus, mais ils ont approximativement les mêmes principes de fonctionnement. Néanmoins, le développement de la théorie et de la pratique des moteurs magnétiques dans le monde se poursuit progressivement. Et des progrès réels particulièrement tangibles dans MD ont été décrits précisément dans les moteurs magnéto-électromagnétiques combinés à faible coût avec l'utilisation d'aimants permanents très efficaces. Ces analogues les plus proches d'une telle importance pour la communauté mondiale - les prototypes de moteurs magnétiques perpétuels sont appelés - moteurs-générateurs électromagnétiques (EMDG) avec électroaimants et aimants permanents sur le stator ou le rotor. De plus, ils existent déjà réellement, ils sont constamment améliorés, et même certains d'entre eux sont déjà produits en série. De nombreux messages sont apparus sur Internet et des articles sur leurs conceptions avec des photos et leurs études expérimentales. Par exemple, on connaît des moteurs-générateurs électromagnétiques Adams /1/ efficaces, déjà testés dans le métal et relativement peu coûteux. De plus, certaines des conceptions les plus simples d'EMDG combinés ont même déjà atteint la production en série et la mise en œuvre de masse. Ce sont, par exemple, les moteurs-roues électromagnétiques en série de Shkondin utilisés sur les vélos électriques.
Cependant, les conceptions et l'ingénierie de puissance de tous les EMDG connus sont encore assez inefficaces, ce qui ne leur permet pas de fonctionner en mode "mouvement perpétuel", c'est-à-dire sans source d'alimentation externe.
Néanmoins, il existe des voies pour une amélioration énergétique constructive et radicale des EMDG connus. Et ce sont précisément ces options énergétiquement plus avancées qui peuvent faire face à cette tâche difficile - fonctionnement complètement autonome dans le mode d'un moteur-générateur électromagnétique «perpétuel» - sans aucune consommation d'électricité provenant d'une source externe, et sont examinées dans cet article.
Cet article est consacré au développement et à la description du principe de fonctionnement de la conception originale d'un moteur-générateur électromagnétique simple d'un nouveau type avec un électroaimant à arc sur le stator et avec un seul aimant permanent (PM) sur le rotor, avec rotation polaire de ce PM dans l'entrefer de l'électroaimant, ce qui est tout à fait opérable en mode "générateur de mouvement perpétuel".
Auparavant et partiellement, cette conception d'un EMD polaire aussi inhabituel dans une version réversible différente a déjà été testée sur les maquettes existantes de l'auteur de l'article et a montré une opérabilité et des performances énergétiques assez élevées.
Description de la conception et du circuit électrique de l'EMDG modernisé
Fig.1 Moteur-générateur électromagnétique avec PM sur le rotor, un électroaimant à courant alternatif externe sur le stator et un générateur électrique sur l'arbre magnétique du rotor
Une conception simplifiée d'un moteur-générateur électromagnétique (EMG) de ce type et de sa partie électrique est illustrée à la fig. 1. Il se compose de trois unités principales - directement du DM avec un électroaimant sur le stator et un PM sur le rotor et un générateur électromécanique sur le même arbre avec le DM. Le dispositif MD est constitué d'un électro-aimant statique statorique 1 réalisé sur un segment annulaire avec découpe ou sur un circuit magnétique à arc 2 avec une bobine inductive 3 de cet électro-aimant et un interrupteur électronique d'inversion de courant dans la bobine 3 qui lui est attaché et un aimant permanent (PM) 4 rigidement placé sur le rotor 5 dans l'entrefer de cet électroaimant 1. L'arbre de rotation du rotor 5 de l'EMD est relié par un accouplement à l'arbre 7 du générateur électrique 8. Le dispositif est équipé avec le régulateur le plus simple - un interrupteur électronique 6, (onduleur autonome), réalisé selon le schéma d'un simple pont onduleur autonome semi-commandé, connecté électriquement à la sortie de l'enroulement inductif 3 électroaimants 2 et via l'entrée d'alimentation - à une source autonome d'électricité 10. De plus, l'enroulement inductif réversible 3 de l'électroaimant 1 est inclus dans la diagonale de courant alternatif de cet interrupteur 6 et à travers le circuit continu cet interrupteur 6 est relié à une source CC tampon 10, par exemple, pour acc la sortie électrique du générateur de la machine électrique 8 est reliée soit directement aux enroulements de la bobine inductive 3, soit par l'intermédiaire d'un redresseur électronique intermédiaire (non représenté) à une source continue tampon (type AB) 7.
Le commutateur électronique le plus simple du pont (inverseur autonome) est constitué de 4 valves à semi-conducteurs, contient deux transistors de puissance 9 et deux touches sans contact incontrôlables de conduction unidirectionnelle (diode) 10 dans les bras du pont. Deux capteurs 11 de la position de l'aimant PM sont également placés sur le stator électromagnétique 1 de ce MD 5 du rotor 6, à proximité de la trajectoire de son mouvement 15, et comme capteur de position de l'aimant PM 5 du rotor, de simples capteurs de contact de l'aimant l'intensité du champ - des commutateurs Reed sont utilisés. Ces capteurs de position 11 de l'aimant 4 du rotor 5 sont placés en quadrature - un capteur est situé près de l'extrémité du solénoïde à pôles et le second est décalé de 90 degrés (interrupteurs à lames), près du chemin de rotation du PM5 de le rotor 6. Les sorties de ces capteurs de position 11 PM 5 du rotor sont des interrupteurs reed dont les relais sont reliés par l'intermédiaire d'un dispositif logique amplificateur 12 aux entrées de commande des transistors 9. Une charge électrique utile 13 est reliée à l'enroulement de sortie de le générateur électrique 8 par l'intermédiaire d'un interrupteur (non représenté) passer de l'unité de démarrage à courant continu à l'alimentation complète à partir du générateur électrique 8 (non représenté).
Nous notons les principales caractéristiques de conception d'un tel MD par rapport aux analogues:
1. Un électroaimant à arc économique à faible ampérage multi-tours est utilisé.
2. L'aimant permanent 4 du rotor 5 tourne dans l'entrefer de l'électroaimant à arc 1, précisément par les forces magnétiques d'attraction et de répulsion du PM 5. En raison du changement de polarité magnétique des pôles magnétiques dans l'entrefer de cet électroaimant, lorsque le sens du courant dans la bobine 3 de l'électroaimant 1 commande les capteurs de position 11 PM de l'aimant 4 du rotor 5. On notera également qu'il convient de réaliser le rotor 5 massif en matériau amagnétique afin d'effectuer la fonction utile d'un volant inertiel.
Moteur électromagnétique réversible avec PM externe sur le rotor
En principe, une version réversible de la conception EMD est également possible, dans laquelle le rotor avec un aimant permanent PM sur la jante est placé à l'extérieur de l'électroaimant. Auparavant, une telle variante d'un EMD réversible avait été développée par l'auteur de l'article, créée et testée avec succès dans le travail, et en 1986. Ci-dessous, sur la Fig. 2,3, il y a aussi une conception simplifiée d'un tel précédemment testé EMDG, décrit précédemment dans les articles de l'auteur /2-3/
La conception (incomplète) de la disposition de l'EMD le plus simple avec un aimant permanent externe sur le rotor et avec l'électroaimant du stator EMD retiré est illustrée sur la photo (Fig. 3). En réalité, l'électroaimant est régulièrement placé au centre d'un cylindre transparent amagnétique diélectrique cylindrique avec un couvercle supérieur, sur lequel est monté l'arbre de rotation de cet EMD. L'interrupteur et les autres composants électriques ne sont pas représentés sur la photo.
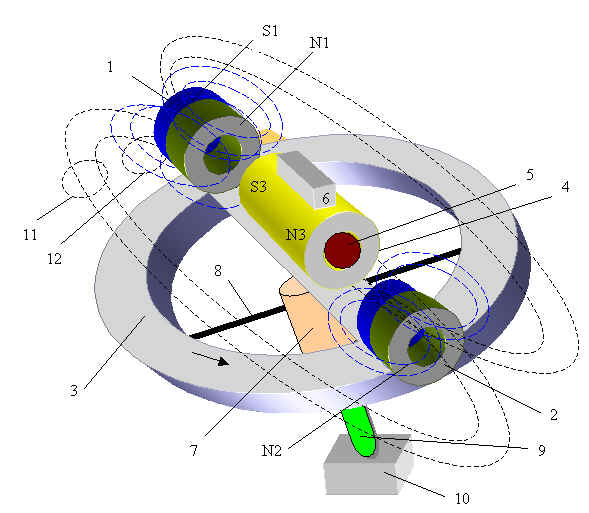
Fig.2 EMDG réversible avec un rotor MP-magnétique externe (conception incomplète)
Désignations :
1. aimant permanent (PM1)
2. aimant permanent (PM2)
3. Rotor annulaire EMD (PM1.2 placé rigidement sur le rotor)
4. enroulement d'un électro-aimant statorique fixe (suspension indépendante)
5. circuit magnétique du solénoïde
6. Capteurs de position du rotor PM
7. arbre du rotor (palier non magnétique)
8. rayons de liaison mécanique du rotor annulaire et de son arbre
9. arbre de support
10. soutien
11. alimenter les lignes magnétiques d'un électroaimant
12. lignes magnétiques de l'aimant permanent La flèche indique le sens de rotation du rotor 3

Fig.3 Photo du schéma EMDG le plus simple (avec l'électroaimant retiré)
Description du travail du moteur-générateur électromagnétique "perpétuel" (Fig. 1)
L'appareil - ce moteur électromagnétique perpétuel - générateur (Fig. 1) fonctionne comme suit.
Démarrage et accélération du rotor magnétique EMDG à une vitesse constante
L'EMDG est démarré en appliquant un courant électrique à la bobine 3 de l'électroaimant 2 à partir du bloc d'alimentation 10. La position initiale des pôles magnétiques de l'aimant permanent 4 du rotor est perpendiculaire à l'entrefer de l'électroaimant 2. La polarité des pôles magnétiques de l'électroaimant se produit dans ce cas de sorte que l'aimant permanent 4 du rotor 5 commence à tourner sur son axe de rotation 16, par des forces magnétiques, étant attiré par ses pôles magnétiques vers le pôle magnétique opposé de l'électroaimant 2. A ce moment de coïncidence des pôles magnétiques opposés de l'aimant 4 et des extrémités dans l'entrefer de l'électroaimant 2, le courant dans la bobine 3 est coupé par la commande du relais reed magnétique (ou la sinusoïde de ce courant passe par zéro) et par inertie, le rotor massif passe ce point mort de sa trajectoire avec PM 4. Après cela, le sens du courant dans la bobine 3 est modifié et les pôles magnétiques de l'électroaimant 2 dans cet espace de travail deviennent les mêmes que le magnétique pôles de l'aimant permanent 4. En conséquence, les forces de la répulsion magnétique ia des mêmes pôles magnétiques - un aimant permanent 4 du rotor et le rotor lui-même reçoivent un moment d'accélération supplémentaire agissant dans le sens de rotation du rotor dans le même sens. Après avoir atteint la position des pôles magnétiques du rotor PM - lors de sa rotation - le long du méridien magnétique, dans la bobine 3, changez à nouveau le sens du courant à la commande du deuxième capteur de position magnétique 11, l'inversion des pôles magnétiques de l'électroaimant 2 se produit à nouveau dans l'entrefer de travail et l'aimant permanent 4 recommence à être attiré vers les pôles magnétiques opposés les plus proches de l'électroaimant 2 dans le sens de rotation dans son entrefer. Et puis le processus d'accélération du PM 4 et du rotor - en inversant cycliquement le courant électrique dans la bobine 3 en cyclant les transistors 8 du commutateur 7 à partir des capteurs de position 11 du PM du rotor est répété à plusieurs reprises de manière cyclique. Et en même temps, à mesure que le PM 4 et le rotor 5 accélèrent, la fréquence des inversions de courant électrique dans la bobine 3 augmente automatiquement, en raison de la présence dans ce système électromécanique de rétroaction positive le long du circuit à travers le commutateur et les capteurs de position de les PM 4 du rotor.
Notez que la direction du courant électrique dans la bobine 3 (représentée par des flèches sur la figure 1) change en fonction du transistor 8 de l'interrupteur 7 qui est ouvert. En modifiant la fréquence de commutation des transistors, nous modifions la fréquence du courant alternatif dans la bobine 3 de l'électroaimant et, en conséquence, modifions la vitesse de rotation du PM 4 du rotor 5.
CONCLUSION: Ainsi, l'aimant permanent du rotor pour une révolution complète autour de son axe subit presque continuellement un moment d'accélération unidirectionnel de la force d'interaction magnétique avec les pôles magnétiques de l'électroaimant, qui le met en rotation et l'accélère progressivement ainsi que le générateur électrique sur un arbre de rotation commun à une vitesse de rotation constante donnée.
Méthode directe de commande électrique du bobinage de l'électroaimant statorique EMDG en fonction de la position du rotor PM
Une innovation supplémentaire pour fournir un tel procédé de commande du bobinage d'un électroaimant 3 MD avec un courant alternatif de la fréquence et de la phase requises directement à partir de la sortie d'un générateur de courant alternatif en régime établi est l'introduction dans un tel système d'un moteur magnétique - un générateur électrique - un circuit L-C résonnant parallèle - dans le circuit il y a deux inductances - de la bobine 3 et de l'enroulement du stator du générateur et de la capacité électrique supplémentaire introduction d'un condensateur électrique supplémentaire 17 dans le circuit électrique de sortie du générateur 8 pour assurer son auto-excitation et sa résonance électrique L-C subséquente, pour réduire les pertes électriques et pour un contrôle extrêmement simple de l'inductance 3 par courant alternatif avec la tension et la phase de courant souhaitées directement à partir du générateur 8.
Mode entièrement autonome ("perpetuum mobile") EMDG
Il est bien évident que pour assurer le fonctionnement de ce dispositif en mode "mouvement perpétuel", il est nécessaire d'obtenir de l'énergie gratuite des aimants permanents du rotor, suffisante pour la génération d'un générateur électrique sur l'arbre EMD requis pour ce fonctionnement complètement autonome du système - électricité. Par conséquent, la condition la plus importante est de s'assurer que le rotor magnétique de ce MD a un couple suffisant pour générer une quantité d'électricité suffisante sur son arbre, ce qui serait plus que suffisant pour alimenter la bobine de l'électroaimant, charge utile d'une valeur donnée et compenser pour diverses pertes inévitables dans un tel système électromécanique avec PM sur le rotor. Une fois le PM 4 déroulé et le rotor atteint 5 tours nominaux, nous commutons l'alimentation de la bobine 3 directement à partir du générateur électrique ou via un convertisseur de tension supplémentaire, et la source d'alimentation du démarreur est soit complètement éteinte, soit mise en mode de recharge du générateur électrique sur l'arbre de cet EMD.
ALGORITHMES D'ASSEMBLAGE STRUCTUREL ET DE CONTRÔLE NÉCESSAIRES AU FONCTIONNEMENT DE CE MOTEUR-GÉNÉRATEUR EN MODE « PPERP MOBILE »
Cette condition importante pour le fonctionnement du DM en mode « mouvement perpétuel » ne peut être remplie que si au moins six conditions sont remplies simultanément :
1. l'utilisation d'aimants permanents puissants modernes en niobium dans les MD, qui fournissent le couple maximal d'un tel rotor avec des dimensions minimales du PM.
2. l'utilisation d'un circuit d'électroaimant MD efficace à très faible coût sur le stator MD en raison du nombre extrêmement élevé de tours dans l'enroulement de l'électroaimant et de la conception correcte et efficace de son circuit magnétique et de son enroulement.
3. la nécessité d'un dispositif de démarrage et d'une source d'électricité de démarrage pour démarrer et accélérer le MD avec l'alimentation de la bobine de l'électroaimant à partir du commutateur.
4. l'algorithme correct pour contrôler le courant électrique dans l'enroulement de l'électroaimant dans la direction, l'amplitude, en fonction de la position du rotor PM.
5. coordination des paramètres électriques du générateur électrique et du bobinage de l'électroaimant.
6. l'algorithme correct pour commuter les circuits d'alimentation de l'enroulement d'électroaimant lorsque le circuit du générateur électrique est allumé dans le circuit d'alimentation de l'enroulement d'électroaimant et la source d'électricité de démarrage, par exemple AB, est transférée du mode de décharge au mode de sa recharge électrique.
ALGORITHME DE COMMUTATION DU COURANT ELECTRIQUE DANS LA BOBINE DE L'ELECTROAIMANT EN FONCTION DE LA POSITION DU ROTOR EMD PM (Fig. 1)
Considérons l'algorithme de commutation du courant électrique dans la bobine en présence d'un barreau magnétique sur le rotor EMD par tour de rotor (Fig. 3) Pour assurer le fonctionnement efficace de cet EMD (conception Fig. 1) , en utilisant les diagrammes combinés de la position du rotor et du sens de circulation du courant dans l'électroaimant 1 du stator de l'enroulement 3. Comme il ressort de ces diagrammes, l'essence de l'algorithme correct pour contrôler l'électroaimant 1 EMD est qu'un tour complet du rotor PM courant électrique dans l'enroulement inductif 3 de l'électroaimant fait deux oscillations complètes .. C'est-à-dire la fréquence de l'électricité Le courant fourni à l'enroulement 3 de l'électroaimant 1 au moyen d'un interrupteur électronique qui lui est fixé, contrôlé par les commandes des capteurs de position du rotor PM, est égale à deux fois la vitesse du rotor, et la phase de ce courant électrique est rigoureusement synchronisée avec la position du rotor PM. EMD. Étant donné que l'interrupteur commute le sens du courant dans l'enroulement 3 (courant inverse) se produit strictement sur l'équateur magnétique du PM lorsque les pôles magnétiques du PM et les pôles magnétiques des extrémités du circuit magnétique coïncident dans l'espace de travail de le circuit magnétique 2 de l'électroaimant 1, puis, par conséquent, pour un tour complet du PM du rotor, il subit constamment un couple unidirectionnel accélérant, et deux fois de l'attraction des pôles magnétiques opposés des extrémités du circuit magnétique de l'électroaimant et le PM du rotor, et deux fois - en raison des forces magnétiques de répulsion de leurs pôles magnétiques similaires.
Fig.4 Chronogramme du fonctionnement d'un interrupteur électronique pour inverser le courant dans l'enroulement de l'électroaimant du stator pour un tour du rotor PM
Fig.5 Cyclogramme de l'alternance des pôles magnétiques dans l'entrefer d'un électroaimant pour un tour du PM du rotor EMDG
A l'explication de l'algorithme de l'électroaimant EMD :
3.4 - pôles magnétiques des extrémités du circuit magnétique d'arc 2 de l'électroaimant 1
La bobine avec l'enroulement 3 est placée sur le circuit magnétique 2 de l'électroaimant 1
9. aimant du rotor