三相電動機用周波数変換器
三相非同期モーターは、産業やその他の人間の生活や活動の分野で長い間使用されてきました。 ワークフローのすべての段階の中で、ユニットのスムーズな始動とブレーキングに最も注意が払われています。 この条件を満たすためには、三相電動機用の周波数変換器を使用する必要があります。 周波数変換器は、その主な名前に加えて、インバーター、可変周波数ドライブ、または AC 周波数変換器としても知られています。
周波数変換器の主な機能は、非同期モーターの回転速度を制御することです。これにより、電気エネルギーが機械エネルギーに変換されます。 最初の動きは、特定の技術操作を実行するために必要な他のタイプの動きに変換されます。 周波数変換器を使用すると、電気モーターの効率を最大 98% にすることができます。
コンバータのデバイスと動作原理
周波数変換器は、非同期タイプの三相電気モーターの回転速度を調整します。 電気の作用で得られる回転は、特別な駆動装置の助けを借りて機械的な動きに変換されます。 回転速度は、他のデバイスからも制御できます。 ただし、それらはすべて、高コスト、複雑な設計、および低品質という形で深刻な欠点を持っています。 さらに、そのようなデバイスの調整範囲は、通常の操作には完全に不十分です。
これらの問題はすべて、周波数変換器の助けを借りて効果的に解決されます。 このデバイスは、ソフトスタートとストップを提供するだけでなく、エンジンで発生する他のプロセスも制御します。 chastotnik を使用することで、誤動作や緊急事態のリスクが最小限に抑えられました。 速度とスムーズな調整は、三相モーター用に特別に設計された周波数変換回路によって提供されます。 その適用の結果、電気モーターの連続運転時間が大幅に増加し、大幅な省エネと増加を達成することが可能になりました。
電気モーターの回転速度を制御できるようになった理由は何ですか? まず、ネットワークからの電圧の周波数が変化します。 さらに、必要な振幅と周波数を備えた通常の三相電圧がそこから形成され、電気モーターによって消費されます。 速度制御はかなり広い範囲で行われます。 必要に応じて、chastotnik を使用すると、ローターの回転を反対方向に切り替えることができます。 すべての調整は、最大許容速度と設置電力を考慮して、ユニットのパスポートデータを考慮して行う必要があります。
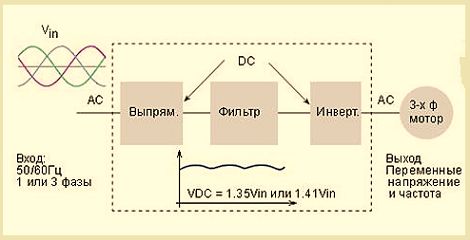
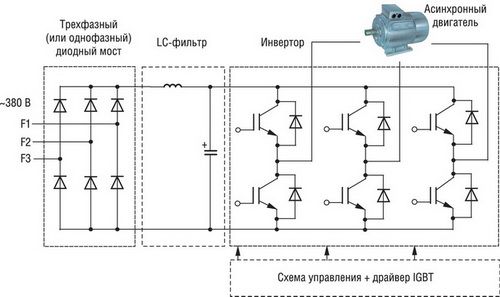
周波数変換器の一般的なデバイスを図に示します。 この装置は、次の 3 つのコンポーネントで構成されています。
- 整流器。 電源に接続すると、DC 電圧が生成されます。 変更に応じて、管理対象または非管理対象にすることができます。
- フィルター。 整流された電圧を平滑化するように設計されているため、その設計にはコンデンサが含まれています。
- インバーター。 任意の周波数の電圧を直接発生させ、モーターに供給します。
チャストニコフの主な分類は、速度制御の種類に応じて実行されます。 2 つの主なモードがあります。
- フィードバックなしのスカラー モード。 この場合、ステータ磁場が制御される。
- フィードバックの有無にかかわらずベクトル モード。 ここでは、回転子と固定子の磁場が相互作用し、制御で考慮されます。 このモードは、さまざまな速度でトルクを最適化します。 この制御方法は、より正確で効率的であると考えられています。 ただし、特別な知識とスキルが必要であり、維持にはより多くの費用がかかります。
周波数変換器の接続と設定
周波数変換器の接続は、非同期モーターを備えた機器の個人所有者にとって特に重要です。 いずれかのフェーズで短絡が発生した場合にネットワークの電源を切るサーキット ブレーカを取り付けることを事前にお勧めします。
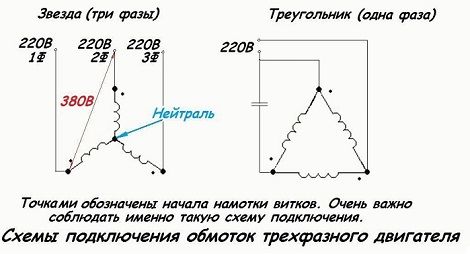
回路では、非同期モーター用の chastotniki が「三角形」と「星」の 2 つの方法で電気モーターに接続されています。 最初のスキームは、電力損失なしで、単相可変速ドライブに使用されます。 このような chastotniki の最大出力は 3 kW で、主に家庭での使用を目的としています。 スター方式は、三相産業用ネットワークがある場合に使用されます。
始動電流を制限し、始動トルクを減らすために、5 kWを超える出力のエンジンの始動は、混合スキームに従って実行されます。 「スター」は、ステーターに電圧が印加される始動の瞬間に使用されます。 モーターが定格速度に達すると、電源は別の「デルタ」回路に切り替わります。 この方法はどこでも使用されるわけではなく、両方の回路を同時に接続できる場合にのみ使用されます。
リモートコントロールは、周波数変換器に添付された図に従って接続されます。 設置を開始する前、および電源を投入する前に、コントロール レバーを OFF の位置にしておく必要があります。 レバーをON位置に動かすと、この動作はインジケータライトによって確認されます。 多くのモデルでは、デフォルトの開始は RUN ボタンを押すことです。 リモコンのハンドルをゆっくり回すと、電気モーターの速度が徐々に上がります。 必要な速度に達すると、ハンドルはこの位置に固定されます。 モードを逆回転に切り替えるには、逆ボタンがあります。
周波数変換器の自社製造
近年、さまざまな機器の駆動に使用される低電力の非同期電動機が日常生活に広く普及しています。 したがって、彼らのために高価な追加機器を購入しないようにするために、多くの家庭の職人は自分の手でコンバーターを作ることによって電気モーターの周波数調整を提供します。 したがって、エンジン出力を維持しながらエネルギーを節約できます。

家庭用単相ネットワークでは、電力が 1 kW を超えない電気モーターを接続できます。 自家製のチャストニキが主に作られるのはそのようなユニットです。 単相ネットワーク用に設計された三角形の接続について事前に考える必要があります。 この目的のために、ある巻線の出力を別の巻線の入力に接続する原理に従って、巻線の出力が互いに直列に接続されます。 また、ご自身で組み立てる周波数変換器の回路を事前に作成しておくことをお勧めします。
建設を開始する前に、必要な要素と材料をすべて準備する必要があります。 AT90PWM3BモデルのアナログとIR2135モデルに似た三相ブリッジドライバーなど、任意のマイクロコントローラーを使用できます。 さらに、6つのIRG4BC30Wタイプのトランジスタ、6つのボタン、およびインジケータを買いだめする必要があります。 すべての部品は、フレキシブル ケーブルで相互に接続された 2 つのボード上にあります。
周波数変換器の設計が補足されます。 この部品は、既製のものを購入するか、別のスキームに従って自分の手で組み立てることができます。 モーターの動作の制御は、外部制御電流または線形デカップリングを備えたIL300マイクロ回路を使用して実行されます。 共通のラジエータは、トランジスタとダイオード ブリッジの取り付けに使用されます。 コントロール ボタンは、OS2-4 オプトカプラーによって複製されます。
電気モーターの出力が小さい場合、単相周波数変換器に変圧器を取り付ける必要はありません。 代わりに、ワイヤの断面積が 0.5 mm の電流シャントを使用できます。 DA-1アンプもそれに接続されており、追加の電圧測定機能を実行します。
運転中の装置のメンテナンス
- まず第一に、タイムリーにデバイスの内側からほこりを取り除く必要があります。 主な手順は掃除機で実行されますが、この方法で完全に掃除することはできません。 掃除機は、蓄積されたほこりの厚くて密な層に対応していません。 したがって、コンプレッサーを使用するか、手動でクリーニングすることをお勧めします。
- 要素、部品、およびアセンブリをタイムリーに定期的に交換することが非常に重要です。 冷却ファンは、2 ~ 3 年使用したら交換することをお勧めします。 ヒューズ、内部ループ、その他の部品には期限があります。 これらの条件に従うと、電気モーター用の周波数変換器はより長持ちします。
- 内部温度とバス電圧を監視することは必須です。 温度が高すぎると、コンデンサが破壊され、熱伝導性ペーストが乾燥し始めるという悪影響が生じます。
- 少なくとも 3 年に 1 回はペーストを交換することをお勧めします。 周囲温度は 40 度を超えてはならず、湿度とほこりの濃度は許容範囲を超えてはなりません。
非同期モーターにおける周波数変換器の利点
非同期モーターには、DC デバイスよりも多くの利点があります。 シンプルな設計と高い信頼性が特徴です。 したがって、家庭用および産業用には、非同期ユニットが最も頻繁に選択されます。

現在、多くのユーザーは、モーターの動作中に電流を機械的に制御することを拒否しています。 この方法は、機器の適切な品質を保証するものではありません。 代わりに、周波数変換器が長い間使用されてきました。 電子制御により、エンジン自体のパワーを維持しながら、エネルギー消費を大幅に削減できます。
周波数変換器は、機器の文書に反映されている技術仕様に従って操作する必要があります。 自家製のデバイスは自宅でのみ使用することをお勧めします。生産では、工場製の機器を使用してください。 インバータの修理およびメンテナンスは、有資格者のみが行う必要があります。