DC ძრავა
DC ძრავა გამოიგონეს სხვა ტიპის მანქანებზე ადრე, რომლებიც ელექტრო ენერგიას მექანიკურ ენერგიად გარდაქმნიან. მიუხედავად იმისა, რომ AC ძრავები ბოლო დროს ყველაზე პოპულარული გახდა, არის აპლიკაციები, სადაც DC ძრავების ალტერნატივა არ არსებობს.
DC და AC ძრავა
გამოგონების ისტორია
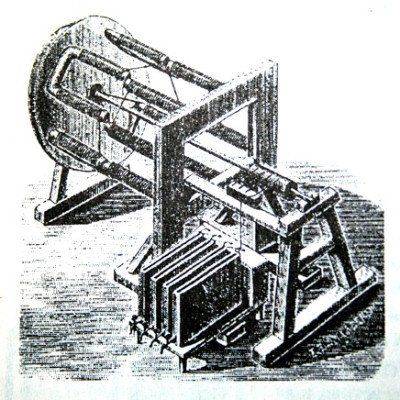
Jacobi ელექტროძრავა.
DC ელექტროძრავების (DC motors) მუშაობის პრინციპის გასაგებად, ჩვენ მივმართავთ მისი შექმნის ისტორიას. ასე რომ, პირველი ექსპერიმენტული მტკიცებულება იმისა, რომ ელექტრო ენერგია შეიძლება გარდაიქმნას მექანიკურ ენერგიად, აჩვენა მაიკლ ფარადეიმ. 1821 წელს მან ჩაატარა ექსპერიმენტი ვერცხლისწყლით სავსე ჭურჭელში ჩაშვებული გამტარით, რომლის ფსკერზე მუდმივი მაგნიტი იყო. დირიჟორზე ელექტროენერგიის გამოყენების შემდეგ, მან დაიწყო ბრუნა მაგნიტის გარშემო, აჩვენა მისი რეაქცია ჭურჭელში არსებულ მაგნიტურ ველზე. ფარადეის ექსპერიმენტმა ვერ იპოვა პრაქტიკული გამოყენება, მაგრამ დაამტკიცა ელექტრო მანქანების შექმნის შესაძლებლობა და დასაბამი მისცა ელექტრომექანიკის განვითარებას.
პირველი DC ელექტროძრავა, რომელიც ეფუძნებოდა მოძრავი ნაწილის (როტორის) ბრუნვის პრინციპს, შექმნა რუსმა მექანიკოსმა ფიზიკოსმა ბორის სემენოვიჩ იაკობიმ 1834 წელს. ეს მოწყობილობა მუშაობდა შემდეგნაირად:
აღწერილი პრინციპი გამოიყენებოდა ძრავში, რომელიც ჯაკობიმ 1839 წელს 12 მგზავრით ნავში დაამონტაჟა. გემი დინების საწინააღმდეგოდ 3 კმ/სთ სიჩქარით აჩქარებით მოძრაობდა (სხვა წყაროების მიხედვით - 4,5 კმ/სთ), მაგრამ წარმატებით გადალახა მდინარე და მგზავრები ნაპირზე დაეშვა. ელექტროენერგიის წყაროდ გამოიყენებოდა ბატარეა 320 გალვანური უჯრედით, ხოლო მოძრაობა ხდებოდა ბორბლების გამოყენებით.
საკითხის შემდგომმა შესწავლამ მიიყვანა მკვლევარებმა მრავალი კითხვა გადაჭრეს იმის შესახებ, თუ რომელი ენერგიის წყაროა საუკეთესო გამოსაყენებლად, როგორ გაეუმჯობესებინათ მისი შესრულება და ოპტიმიზაცია მოეხდინათ მისი ზომები.
1886 წელს ფრენკ ჯულიან სპრაგიმ პირველად დააპროექტა პირდაპირი დენის ელექტროძრავა, მსგავსი დიზაინით, რაც დღეს გამოიყენება. იგი ახორციელებდა თვითაგზნების პრინციპს და ელექტრო მანქანის შექცევადობის პრინციპს. ამ დროისთვის, ამ ტიპის ყველა ძრავა გადავიდა ენერგიაზე უფრო შესაფერისი წყაროდან - DC გენერატორიდან.
ჯაგრის-კოლექტორის კრებული უზრუნველყოფს როტორის მიკროსქემის ელექტრულ კავშირს აპარატის სტაციონარულ ნაწილში მდებარე სქემებთან.
მოწყობილობა და მუშაობის პრინციპი
თანამედროვე DPT-ებში გამოიყენება დამუხტული გამტარის მაგნიტურ ველთან ურთიერთქმედების იგივე პრინციპი. ტექნოლოგიის გაუმჯობესებით, მოწყობილობას მხოლოდ რამდენიმე ელემენტი ემატება, რომლებიც აუმჯობესებენ შესრულებას. მაგალითად, დღესდღეობით მუდმივი მაგნიტები გამოიყენება მხოლოდ დაბალი სიმძლავრის ძრავებში, რადგან დიდ მანქანებში ისინი ძალიან დიდ ადგილს დაიკავებენ.
ძირითადი პრინციპი
ამ ტიპის ძრავების საწყისი პროტოტიპები შესამჩნევად უფრო მარტივი იყო, ვიდრე თანამედროვე მოწყობილობები. მათი პრიმიტიული მოწყობილობა მოიცავდა მხოლოდ ორი მაგნიტის სტატორს და არმატურას გრაგნილებით, რომლებზედაც დენი იყო გამოყენებული. მაგნიტური ველების ურთიერთქმედების პრინციპის შესწავლის შემდეგ, დიზაინერებმა დაადგინეს ძრავის მუშაობის შემდეგი ალგორითმი:
- ელექტრომომარაგება ქმნის ელექტრომაგნიტურ ველს არმატურის გრაგნილებზე.
- ელექტრომაგნიტური ველის პოლუსები მოიგერია მუდმივი მაგნიტური ველის იგივე პოლუსებიდან.
- არმატურა ლილვთან ერთად, რომელზედაც ის არის დამაგრებული, ბრუნავს გრაგნილის ამაღელვებელი ველის შესაბამისად.
ეს ალგორითმი თეორიულად მშვენივრად მუშაობდა, მაგრამ პრაქტიკაში, პირველი ძრავების შემქმნელებს შეექმნათ კონკრეტული პრობლემები, რომლებიც ხელს უშლიდნენ აპარატის მუშაობას:
- მკვდარი პოზიცია, საიდანაც ძრავის დაწყება შეუძლებელია - როდესაც ბოძები ზუსტად არის ორიენტირებული ერთმანეთის წინ.
- დაწყების შეუძლებლობა ძლიერი წინააღმდეგობის ან ბოძების სუსტი მოგერიების გამო.
- როტორი ჩერდება ერთი რევოლუციის შემდეგ. ეს გამოწვეულია იმით, რომ ნახევარი წრის გავლის შემდეგ, მაგნიტის მიზიდულობა არ აჩქარდა, მაგრამ შეანელა როტორის ბრუნვა.
პირველი პრობლემის გადაწყვეტა საკმაოდ სწრაფად იქნა ნაპოვნი - ამისთვის შემოთავაზებული იყო ორზე მეტი მაგნიტის გამოყენება. მოგვიანებით, საავტომობილო მოწყობილობაში ჩართული იყო რამდენიმე გრაგნილი და კოლექტორ-ფუნჯი, რომელიც ენერგიას აწვდიდა მხოლოდ ერთ წყვილ გრაგნილს დროის გარკვეულ მომენტში.
კოლექტორ-ფუნჯის დენის მიწოდების სისტემა ასევე წყვეტს როტორის დამუხრუჭების პრობლემას - პოლარობის შეცვლა ხდება იმ მომენტამდე, როდესაც როტორის ბრუნვა შენელდება. ეს ნიშნავს, რომ ძრავის ერთი რევოლუციის დროს ხდება მინიმუმ ორი პოლარობის შეცვლა.
დაბალი შემომავალი დენების პრობლემა განიხილება ქვემოთ ცალკე განყოფილებაში.
დიზაინი
ამრიგად, მუდმივი მაგნიტი ფიქსირდება ძრავის კორპუსზე, რომელიც ქმნის სტატორს, რომლის შიგნით მდებარეობს როტორი. არმატურის გრაგნილზე დენის გამოყენების შემდეგ, წარმოიქმნება ელექტრომაგნიტური ველი, რომელიც ურთიერთქმედებს სტატორის მაგნიტურ ველთან, ეს იწვევს როტორის ბრუნვას, რომელიც მკაცრად არის დამონტაჟებული ლილვზე. ელექტრული დენის წყაროდან არმატურაზე გადასატანად, ძრავა აღჭურვილია კოლექტორ-ფუნჯით, რომელიც შედგება:
- კოლექციონერი. ეს არის დიელექტრიკული მასალით გამოყოფილი რამდენიმე მონაკვეთის მიმდინარე კოლექტორის რგოლი, რომელიც დაკავშირებულია არმატურის გრაგნილებთან და დამონტაჟებულია უშუალოდ ძრავის ლილვზე.
- გრაფიტის ფუნჯები. ისინი ხურავენ წრედს კოლექტორსა და დენის წყაროს შორის ჯაგრისების გამოყენებით, რომლებიც დაჭერილია კოლექტორის საკონტაქტო ბალიშებზე წნევის ზამბარებით.
არმატურის გრაგნილები ერთ ბოლოში უერთდებიან ერთმანეთს, მეორე ბოლოში კი კოლექტორის მონაკვეთებს, რითაც ქმნიან წრეს, რომლის გასწვრივ დენი მიედინება შემდეგი მარშრუტის გასწვრივ: შეყვანის ჯაგრისი -> როტორის გრაგნილი -> გამომავალი ჯაგრისი.
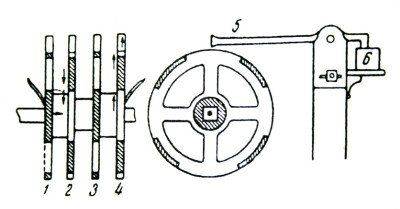
მოცემული მიკროსქემის დიაგრამა (ნახ. 3) გვიჩვენებს პრიმიტიული DC ძრავის მუშაობის პრინციპს ორი განყოფილების კოლექტორით:
- ამ მაგალითში განვიხილავთ როტორის საწყის პოზიციას, როგორც ეს ნაჩვენებია დიაგრამაში. ასე რომ, მას შემდეგ, რაც ელექტროენერგია მიეწოდება ქვედა ფუნჯს, რომელიც აღინიშნება "+", დენი მიედინება გრაგნილში და ქმნის ელექტრომაგნიტურ ველს მის გარშემო.
- გიმლეტის წესის მიხედვით, ანკერის ჩრდილოეთი პოლუსი წარმოიქმნება ქვედა მარცხენა ნაწილში, ხოლო სამხრეთის პოლუსი - ზედა მარჯვნივ. ამავე სახელწოდების სტატორის ბოძებთან მდებარეობით, ისინი იწყებენ მოგერიებას, რითაც აყენებენ როტორს მოძრაობაში, რომელიც გრძელდება მანამ, სანამ საპირისპირო პოლუსები ერთმანეთისგან მინიმალურ მანძილზე არ იქნებიან, ანუ ისინი არ მივიდნენ საბოლოო პოზიციამდე (ნახ. 1).
- კოლექტორის დიზაინი ამ ეტაპზე გამოიწვევს პოლარობის შეცვლას არმატურის გრაგნილებზე. ამის შედეგად, მაგნიტური ველების პოლუსები კვლავ ახლოს იქნებიან და დაიწყებენ მოგერიებას.
- როტორი აკეთებს სრულ რევოლუციას და კოლექტორი კვლავ ცვლის პოლარობას და აგრძელებს თავის მოძრაობას.
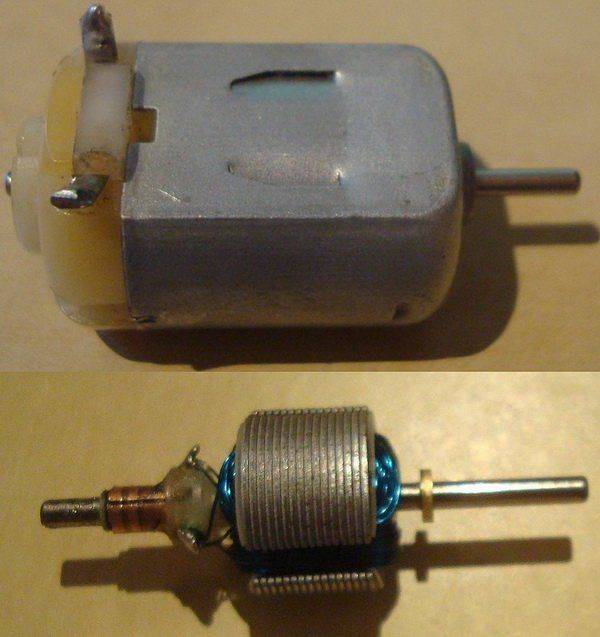
DC ძრავის ნაწილები
აქ, როგორც უკვე აღვნიშნეთ, ნაჩვენებია პრიმიტიული პროტოტიპის მოქმედების პრინციპი. რეალური ძრავები იყენებენ ორზე მეტ მაგნიტს, ხოლო კომუტატორი შედგება მეტი საკონტაქტო ბალიშებისგან, რაც უზრუნველყოფს გლუვ ბრუნვას.
მაღალი სიმძლავრის ძრავებში მუდმივი მაგნიტების გამოყენება შეუძლებელია მათი დიდი ზომის გამო. მათთვის ალტერნატივა არის რამდენიმე გამტარი ღეროების სისტემა, რომელთაგან თითოეულს აქვს საკუთარი გრაგნილი, რომელიც დაკავშირებულია მიწოდების ავტობუსებთან. ქსელში სერიებში შედის ამავე სახელწოდების ბოძები. სხეულზე შეიძლება იყოს 1-დან 4 წყვილამდე ბოძები და მათი რაოდენობა უნდა შეესაბამებოდეს კოლექტორზე დენის შემგროვებელი ჯაგრისების რაოდენობას.
მაღალი სიმძლავრისთვის განკუთვნილ ელექტროძრავებს აქვთ მთელი რიგი ფუნქციური უპირატესობები მათ "მსუბუქ" კოლეგებთან შედარებით. მაგალითად, დენის შემგროვებელი ჯაგრისების ლოკალური განლაგება აბრუნებს მათ ლილვთან შედარებით გარკვეული კუთხით, რათა კომპენსირება მოახდინოს ლილვის დამუხრუჭებაზე, რომელსაც ეწოდება "არმატურის რეაქცია".
საწყისი დენები
ძრავის როტორის თანდათანობით აღჭურვა დამატებითი ელემენტებით, რომლებიც უზრუნველყოფენ მის უწყვეტ მუშაობას და გამორიცხავს სექტორულ დამუხრუჭებას, ჩნდება მისი გაშვების პრობლემა. მაგრამ ეს ყველაფერი ზრდის როტორის წონას - ლილვის წინააღმდეგობის გათვალისწინებით, უფრო რთული ხდება მისი ადგილიდან დაძაბვა. ამ პრობლემის პირველი გამოსავალი, რომელიც მახსენდება, შეიძლება იყოს დასაწყისში მიწოდებული დენის გაზრდა, მაგრამ ამან შეიძლება გამოიწვიოს უსიამოვნო შედეგები:
- ხაზის ამომრთველი ვერ გაუძლებს დენს და გამოირთვება;
- გრაგნილი მავთულები დაიწვება გადატვირთვისგან;
- კოლექტორზე გადართვის სექტორები შედუღებული იქნება გადახურებისგან.
ამიტომ, ასეთ გადაწყვეტილებას შეიძლება ეწოდოს საკმაოდ სარისკო ნახევრად ღონისძიება.
ზოგადად, ეს პრობლემა არის DC ძრავების მთავარი მინუსი, მაგრამ მოიცავს მათ მთავარ უპირატესობას, რის გამოც ისინი შეუცვლელია ზოგიერთ სფეროში. ეს უპირატესობა მდგომარეობს ამოქმედებისთანავე ბრუნვის პირდაპირ გადაცემაში - ლილვი (თუ მოძრაობას იწყებს) ტრიალებს ნებისმიერი დატვირთვით. AC ძრავებს ამის შესაძლებლობა არ შეუძლიათ.
ჯერჯერობით ეს პრობლემა სრულად არ მოგვარებულა. დღემდე, ასეთი ძრავების დასაწყებად გამოიყენება ავტომატური დამწყები, რომლის მუშაობის პრინციპი მსგავსია საავტომობილო გადაცემათა კოლოფთან:
- პირველი, დენი თანდათან იზრდება საწყის მნიშვნელობამდე.
- ადგილიდან "ცვლის" შემდეგ, მიმდინარე მნიშვნელობა მკვეთრად ეცემა და კვლავ შეუფერხებლად იზრდება "ლილვის ბრუნვის რეგულირებით".
- ზღვრულ მნიშვნელობამდე აწევის შემდეგ, მიმდინარე სიძლიერე კვლავ იკლებს და „რეგულირდება“.
ეს ციკლი მეორდება 3-5-ჯერ (ნახ. 4) და წყვეტს ძრავის გაშვების აუცილებლობას ქსელში კრიტიკული დატვირთვების წარმოქმნის გარეშე. სინამდვილეში, ჯერ კიდევ არ არის "რბილი" დაწყება, მაგრამ აღჭურვილობა მუშაობს უსაფრთხოდ და შენარჩუნებულია DC ძრავის მთავარი უპირატესობა - ბრუნვის მომენტი.
გაყვანილობის დიაგრამები
DC ძრავის დაკავშირება გარკვეულწილად უფრო რთულია, ვიდრე AC სპეციფიკაციის მქონე ძრავებთან.
მაღალი და საშუალო სიმძლავრის ძრავებს, როგორც წესი, აქვთ სპეციალური ველის გრაგნილი (OB) და არმატურის კონტაქტები მოთავსებული ტერმინალის ყუთში. ყველაზე ხშირად, წყაროს გამომავალი ძაბვა გამოიყენება არმატურაზე, ხოლო დენი, როგორც წესი, რეგულირდება რეოსტატით, გამოიყენება OB-ზე. ძრავის ბრუნვის სიჩქარე პირდაპირ დამოკიდებულია დენის სიძლიერეზე, რომელიც გამოიყენება აგზნების გრაგნილზე.
DC ძრავების არმატურის და აგზნების გრაგნილის ჩართვის სამი ძირითადი სქემაა:
- სერიის აგზნება გამოიყენება ძრავებში, რომლებიც საჭიროებენ დიდ დენს დაწყებისას (ელექტრო მანქანები, დაქირავებული აღჭურვილობა და ა.შ.). ეს სქემა ითვალისწინებს OF და არმატურის სერიულ კავშირს წყაროსთან. ძაბვის გამოყენების შემდეგ არმატურის გრაგნილებსა და OB-ში გადის იგივე სიდიდის დენები. გასათვალისწინებელია, რომ ლილვზე დატვირთვის თუნდაც მეოთხედით შემცირება თანმიმდევრული აგზნებით გამოიწვევს სიჩქარის მკვეთრ მატებას, რაც შეიძლება გამოიწვიოს ძრავის ავარია, ამიტომ ეს წრე გამოიყენება მუდმივი დატვირთვის პირობებში.
- პარალელური აგზნება გამოიყენება ძრავებში, რომლებიც უზრუნველყოფენ ჩარხების, ვენტილატორების და სხვა აღჭურვილობის მუშაობას, რომლებიც არ ახდენენ მაღალ დატვირთვას ლილვზე გაშვების დროს. ამ წრეში, დამოუკიდებელი გრაგნილი გამოიყენება OF-ის გასააქტიურებლად, რომელიც ყველაზე ხშირად რეგულირდება რიოსტატით.
- დამოუკიდებელი აგზნება ძალიან ჰგავს პარალელურ აგზნებას, მაგრამ ამ შემთხვევაში, დამოუკიდებელი წყარო გამოიყენება OB-სთვის ენერგიის მიწოდებისთვის, რაც გამორიცხავს ელექტრული კავშირის გამოჩენას არმატურასა და აგზნების გრაგნილს შორის.
თანამედროვე DC ელექტროძრავებში, შერეული სქემები შეიძლება გამოყენებულ იქნას სამი აღწერილიდან გამომდინარე.
ბრუნვის სიჩქარის რეგულირება
DPT-ის სიჩქარის რეგულირების გზა დამოკიდებულია მისი კავშირის სქემაზე:
- პარალელური აგზნების მქონე ძრავებში, სიჩქარის შემცირება ნომინალურ მნიშვნელობასთან მიმართებაში შეიძლება განხორციელდეს არმატურის ძაბვის შეცვლით, ხოლო ზრდა აგზნების ნაკადის შესუსტებით. სიჩქარის გასაზრდელად (არაუმეტეს 4-ჯერ ნომინალურ მნიშვნელობასთან შედარებით), OB წრეში ემატება რეოსტატი.
- სერიული აგზნებით, კორექტირება ადვილად ხორციელდება არმატურის წრეში ცვლადი წინააღმდეგობით. მართალია, ეს მეთოდი შესაფერისია მხოლოდ სიჩქარის შესამცირებლად და მხოლოდ 1:3 ან 1:2 თანაფარდობით (გარდა ამისა, ეს იწვევს რიოსტატის დიდ დანაკარგებს). ზრდა ხორციელდება OB წრეში რეგულირებადი რიოსტატის გამოყენებით.
ეს სქემები იშვიათად გამოიყენება თანამედროვე მაღალტექნოლოგიურ აღჭურვილობაში, რადგან მათ აქვთ ვიწრო კორექტირების დიაპაზონი და სხვა უარყოფითი მხარეები. დღესდღეობით, ელექტრონული კონტროლის სქემები სულ უფრო მეტად იქმნება ამ მიზნებისათვის.
უკუქცევა
DC ძრავის ბრუნვის შებრუნების (შებრუნების) მიზნით, თქვენ უნდა:
- სერიული აგზნებით - უბრალოდ შეცვალეთ შეყვანის კონტაქტების პოლარობა;
- შერეული და პარალელური აგზნებით - აუცილებელია დენის მიმართულების შეცვლა არმატურის გრაგნილში; OF-ის რღვევამ შეიძლება გამოიწვიოს ინექციური ელექტრომოძრავი ძალის კრიტიკული ზრდა და მავთულის იზოლაციის დაშლა.
გამოყენების სფერო
როგორც უკვე მიხვდით, DC ძრავების გამოყენება მიზანშეწონილია იმ პირობებში, როდესაც ქსელთან მუდმივი უწყვეტი კავშირი შეუძლებელია. აქ კარგი მაგალითია მანქანის დამწყები, რომელიც უბიძგებს შიდა წვის ძრავას „ადგილიდან“, ან საბავშვო სათამაშოები ძრავით. ამ შემთხვევაში, ბატარეები გამოიყენება ძრავის დასაწყებად. სამრეწველო მიზნებისთვის, DPT გამოიყენება მოძრავი ქარხნებში.
DPT-ის გამოყენების ძირითადი სფეროა ელექტრო ტრანსპორტი. ორთქლის გემებს, ელექტრო ლოკომოტივებს, ტრამვაებს, ტროლეიბუსებს და სხვა მსგავსებს აქვთ ძალიან დიდი სასტარტო წინააღმდეგობა, რომლის გადალახვა შესაძლებელია მხოლოდ DC ძრავების დახმარებით მათი რბილი მახასიათებლებით და ბრუნვის რეგულირების ფართო საზღვრებით. გარემოსდაცვითი ტრანსპორტის ტექნოლოგიების სწრაფი განვითარებისა და პოპულარიზაციის გათვალისწინებით, DPT-ის ფარგლები მხოლოდ იზრდება.

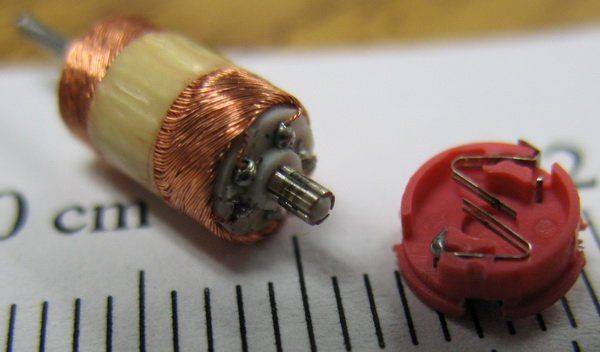
უმარტივესი ფუნჯი-კოლექტორის შეკრება
Დადებითი და უარყოფითი მხარეები
ყოველივე ზემოთქმულის შეჯამებით, შესაძლებელია აღვწეროთ DC ძრავებისთვის დამახასიათებელი უპირატესობები და უარყოფითი მხარეები მათ კოლეგებთან მიმართებაში, რომლებიც შექმნილია AC-ზე მუშაობისთვის.
ძირითადი უპირატესობები:
- DCT-ები შეუცვლელია იმ სიტუაციებში, როდესაც საჭიროა ძლიერი საწყისი ბრუნვა;
- არმატურის ბრუნვის სიჩქარე ადვილად რეგულირდება;
- DC ძრავა არის უნივერსალური ელექტრო მანქანა, ანუ ის შეიძლება გამოყენებულ იქნას როგორც გენერატორი.
ძირითადი ნაკლოვანებები:
- DPT-ებს აქვთ წარმოების მაღალი ღირებულება;
- ფუნჯ-კოლექტორის ასამბლეის გამოყენება იწვევს ხშირი მოვლისა და შეკეთების საჭიროებას;
- ფუნქციონირებისთვის საჭიროებს მუდმივი დენის წყაროს ან გამომსწორებელს.
DC ელექტროძრავები, რა თქმა უნდა, კარგავენ თავიანთ "ცვლადი" კოლეგებს ღირებულებისა და საიმედოობის თვალსაზრისით, თუმცა, ისინი გამოიყენება და გამოიყენებენ, რადგან გარკვეულ სფეროებში მათი გამოყენების უპირატესობები კატეგორიულად კვეთს ყველა მინუსს.