მუდმივი ელექტრომაგნიტური ძრავის გენერატორი
ეს სტატია ეძღვნება ახალი ტიპის მარტივი ორიგინალური "მუდმივი" ელექტრომაგნიტური ძრავის გენერატორის მუშაობის პრინციპის, დიზაინისა და ელექტრული წრედის შემუშავებას და აღწერას სტატორზე ელექტრომაგნიტით და მხოლოდ ერთი მუდმივი მაგნიტით (PM) როტორი, ამ PM-ის ბრუნვით ამ ელექტრომაგნიტის სამუშაო უფსკრულით.
მუდმივი ელექტრომაგნიტური ძრავის გენერატორი ელექტრომაგნიტით სტატორზე და მაგნიტი როტორზე
1. შესავალი
2. რამდენი ენერგია იმალება მუდმივ მაგნიტში და საიდან მოდის ის?
3. ელექტრომაგნიტური ძრავების და გენერატორების მოკლე მიმოხილვა PM-ით
4. მოდერნიზებული ელექტრომაგნიტური ძრავის გენერატორის დიზაინისა და ელექტრომაგნიტის ცვლადი დენის ელექტრომაგნიტით.
5. შექცევადი ელექტრომაგნიტური ძრავა როტორზე გარე PM-ით
6. „მუდმივი“ ელექტრომაგნიტური მოტორ-გენერატორის მუშაობის აღწერა
7. საჭირო კვანძები და კონტროლის ალგორითმები ამ ელექტრომაგნიტური მოტორგენერატორის "მუდმივი მოძრაობის" რეჟიმში მუშაობისთვის.
8. უკუ ელექტრული დენის ალგორითმი ელექტრომაგნიტის გრაგნილში მაგნიტის პოზიციის მიხედვით
9. EMDG-სთვის ელემენტებისა და აღჭურვილობის შერჩევა და გაანგარიშება
10. იაფი ელექტრომაგნიტი EMD (პროექტირებისა და გაანგარიშების საფუძვლები)
11. EMD როტორის მუდმივი მაგნიტების სწორი არჩევანი
12. ელექტრო გენერატორის არჩევანი EMDG-ის პროტოტიპებისთვის
13. მუდმივი ჩამკეტის ელექტრომაგნიტური მოტორ-გენერატორი
14. მუდმივი ელექტრომაგნიტური ძრავა ჩვეულებრივ ინდუქციურ ელექტრო მრიცხველზე
15. ახალი EMDH-ის ენერგოეფექტურობის შედარება ანალოგებთან
16. დასკვნა
შესავალი
მრავალი საუკუნის განმავლობაში მუდმივი მოძრაობის მანქანების შექმნის პრობლემა აღელვებს მრავალი გამომგონებლისა და მეცნიერის გონებას მთელს მსოფლიოში და დღემდე აქტუალურია.
მსოფლიო საზოგადოების "მუდმივი მოძრაობის მანქანების" ამ თემისადმი ინტერესი ჯერ კიდევ დიდია და იზრდება, რადგან ცივილიზაციის ენერგეტიკული მოთხოვნილებები იზრდება და ორგანული არაგანახლებადი საწვავის გარდაუვალი ამოწურვასთან დაკავშირებით, და განსაკუთრებით, ცივილიზაციის გლობალური ენერგეტიკული და ეკოლოგიური კრიზისი. მომავლის საზოგადოების მშენებლობაში, რა თქმა უნდა, მნიშვნელოვანია ახალი ენერგიის წყაროების შემუშავება, რომელიც დააკმაყოფილებს ჩვენს საჭიროებებს. და დღეს რუსეთისთვის და მრავალი სხვა ქვეყნისთვის ეს უბრალოდ სასიცოცხლოდ მნიშვნელოვანია. ქვეყნის სამომავლო აღდგენისა და მოახლოებული ენერგეტიკული კრიზისის დროს, ახალი ენერგიის წყაროები გარღვევის ტექნოლოგიებზე დაფუძნებული აბსოლუტურად აუცილებელი იქნება.
ბევრი ნიჭიერი გამომგონებლის, ინჟინრისა და მეცნიერის თვალები დიდი ხანია მიტრიალებულია მუდმივ მაგნიტებზე (PM) და მათ იდუმალ და გასაოცარ ენერგიაზე. უფრო მეტიც, ეს ინტერესი PM-ების მიმართ კი გაიზარდა ბოლო წლებში, ძლიერი PM-ების შექმნაში მნიშვნელოვანი პროგრესის გამო და ნაწილობრივ მაგნიტური ძრავების (MF) შემოთავაზებული დიზაინის სიმარტივის გამო.
რამდენი ენერგია იმალება მუდმივ მაგნიტში და საიდან მოდის ის?
აშკარაა, რომ თანამედროვე კომპაქტური და ძლიერი PM-ები შეიცავს მაგნიტური ველის მნიშვნელოვან ლატენტურ ენერგიას. და ასეთი მაგნიტური ძრავების და გენერატორების გამომგონებლებისა და შემქმნელების მიზანია იზოლირება და გადაქცევა PM-ის ამ ლატენტური ენერგიის სხვა ტიპის ენერგიად, მაგალითად, მაგნიტური როტორის უწყვეტი ბრუნვის მექანიკურ ენერგიად ან ელექტროენერგიად. ნახშირი წვის დროს გამოყოფს 33 ჯ გრამს, ნავთობი, რომელიც 10-15 წელიწადში ჩვენს ქვეყანაში დასასრულს დაიწყებს, გამოყოფს 44 J გრამს, გრამი ურანი იძლევა 43 მილიარდ J ენერგიას. მუდმივი მაგნიტი თეორიულად შეიცავს 17 მილიარდ ჯოულ ენერგიას. ერთი გრამისთვის. რა თქმა უნდა, როგორც ჩვეულებრივი ენერგიის წყაროების შემთხვევაში, მაგნიტის ეფექტურობა არ იქნება ასი პროცენტი, უფრო მეტიც, ფერიტის მაგნიტს აქვს სიცოცხლის ხანგრძლივობა დაახლოებით 70 წელი, იმ პირობით, რომ იგი არ ექვემდებარება ძლიერ ფიზიკურ, ტემპერატურულ და მაგნიტურ დატვირთვას. , ენერგიის ასეთი რაოდენობით შეიცავს მასში ენერგიას, ეს არც ისე მნიშვნელოვანია. გარდა ამისა, უკვე არსებობს იშვიათი ლითონებისგან დამზადებული სერიული სამრეწველო მაგნიტები, რომლებიც ათჯერ უფრო ძლიერია, ვიდრე ფერიტი და შესაბამისად უფრო ეფექტური. მაგნიტი, რომელმაც ძალა დაკარგა, უბრალოდ შეიძლება „დაიმუხტოს“ ძლიერი მაგნიტური ველით. თუმცა, კითხვა "საიდან მოდის ამდენი ენერგია პრემიერ-მინისტრში" მეცნიერებაში ღია რჩება. ბევრი მეცნიერი თვლის, რომ PM-ში ენერგია მუდმივად მოდის გარედან ეთერიდან (ფიზიკური ვაკუუმი). და სხვა მკვლევარები ამტკიცებენ, რომ ის უბრალოდ თავისთავად წარმოიქმნება PM-ის მაგნიტიზებული მასალის გამო. ჯერჯერობით სიცხადე არ არის.
ცნობილი ელექტრომაგნიტური ძრავების და გენერატორების მოკლე მიმოხილვა
მსოფლიოში უკვე არსებობს მრავალი პატენტი და საინჟინრო გადაწყვეტა მაგნიტური ძრავების სხვადასხვა დიზაინისთვის - მაგრამ დემონსტრაციაში "მუდმივი მოძრაობის" რეჟიმში ასეთი მოქმედი MD-ები პრაქტიკულად ჯერ არ არის. და ჯერჯერობით, "მუდმივი" სამრეწველო მაგნიტური ძრავები (IM) არ არის შექმნილი და ათვისებული სერიებში და არ არის დანერგილი რეალობაში, და მით უმეტეს, ისინი ჯერ არ არიან ღია გაყიდვაში. სამწუხაროდ, ინტერნეტში ცნობილი ინფორმაცია პერენდევისა (გერმანია) და Akoil-energy-ის სერიული მაგნიტური ძრავის გენერატორების შესახებ რეალურად ჯერ კიდევ არ არის დადასტურებული. MD-ში ლითონის ნელი რეალური პროგრესის მრავალი შესაძლო მიზეზი არსებობს, მაგრამ, როგორც ჩანს, არსებობს ორი ძირითადი მიზეზი: ან ამ მოვლენების კლასიფიკაციის გამო, ისინი არ არის მიყვანილი მასობრივ წარმოებამდე, ან საპილოტე სამრეწველო ნიმუშების დაბალი ენერგოეფექტურობის გამო. მედიცინის დოქტორის. უნდა აღინიშნოს, რომ მექანიკური კომპენსატორებით და მაგნიტური ეკრანებით წმინდა მაგნიტური ძრავების შექმნის ზოგიერთი პრობლემა, მაგალითად, ფარდის ტიპის MD, ჯერ კიდევ არ არის სრულად გადაჭრილი მეცნიერებისა და ტექნოლოგიების მიერ.
ზოგიერთი ცნობილი MD-ის კლასიფიკაცია და მოკლე ანალიზი
- მაგნიტო-მექანიკური მაგნიტური ძრავები დუდიშევი/1-3/. მათი კონსტრუქციული დახვეწით, მათ შეუძლიათ იმუშაონ "მუდმივი მოძრაობის" რეჟიმში.
- ძრავი MD კალინინა- არაფუნქციონირებადი ორმხრივი MD მბრუნავი მაგნიტური ეკრანით - MD იმის გამო, რომ ზამბარის კომპენსატორი არ არის მიყვანილი სწორი დიზაინის გადაწყვეტამდე.
- ელექტრომაგნიტური ძრავა "პერენდევი"- კლასიკური ელექტრომაგნიტური ძრავა PM-ით როტორზე და კომპენსატორით, შეუსაბამო კომუტაციის პროცესის გარეშე იმ ადგილებში, სადაც გადის როტორის PM-ით დაჭერის მკვდარი წერტილები. მასში შესაძლებელია ორი სახის გადართვა (როტორის PM-ის "დაკავების წერტილის" გავლის შესაძლებლობა - მექანიკური და ელექტრომაგნიტური. პირველი ავტომატურად ამცირებს პრობლემას SMOT'a-ს მარყუჟოვან ვერსიამდე (და ზღუდავს ბრუნვის სიჩქარეს და მაშასადამე სიმძლავრე), მეორე უფრო დაბალია.„მუდმივი ძრავში“ ვერ მუშაობს.
- Minato ელექტრომაგნიტური ძრავა- ელექტრომაგნიტური ძრავის კლასიკური მაგალითი PM როტორით და ელექტრომაგნიტური კომპენსატორით, რომელიც უზრუნველყოფს "შეკავების წერტილის" მაგნიტური როტორის გავლას (მინატოს მიხედვით, "კოლაფსის წერტილი"). პრინციპში, ეს არის მხოლოდ მოქმედი ელექტრომაგნიტური ძრავა გაზრდილი ეფექტურობით. მაქსიმალური მიღწევადი ეფექტურობა არის დაახლოებით 100% არაფუნქციონირებადი "მუდმივი" MD რეჟიმში.
- ჯონსონის ძრავა- პერენდევის ელექტრომაგნიტური ძრავის ანალოგი კომპენსატორით, მაგრამ კიდევ უფრო დაბალი ენერგიით.
- შკონდინის მაგნიტური ძრავის გენერატორი- ელექტრომაგნიტური ძრავა PM-ით, რომელიც მოქმედებს PM-ის მაგნიტური მოგერიების ძალებზე (კომპენსატორის გარეშე). კონსტრუქციულად რთულია, აქვს კოლექტორ-ფუნჯის შეკრება, მისი ეფექტურობა არის დაახლოებით 70-80%. უფუნქციოა მარადიული MD რეჟიმში.
- ადამსის ელექტრომაგნიტური ძრავის გენერატორი- ეს არის ფაქტობრივად ყველაზე მოწინავე ყველა ცნობილი - ელექტრომაგნიტური ძრავის გენერატორი, რომელიც მუშაობს შკონდინის საავტომობილო ბორბლის მსგავსად, მხოლოდ ელექტრომაგნიტების ბოლოებიდან PM-ის მაგნიტური მოგერიების ძალებზე. მაგრამ ეს PM-ზე დაფუძნებული ძრავის გენერატორი სტრუქტურულად ბევრად უფრო მარტივია ვიდრე შკონდინის მაგნიტური ძრავის გენერატორი. პრინციპში, მისი ეფექტურობა შეიძლება მხოლოდ 100% -ს მიუახლოვდეს, მაგრამ მხოლოდ იმ შემთხვევაში, თუ ელექტრომაგნიტის გრაგნილი გადართულია დამუხტული კონდენსატორიდან მოკლე მაღალი ინტენსივობის პულსით. უფუნქციოა "მარადიული" MD რეჟიმში.
- დუდიშევის ელექტრომაგნიტური ძრავა. შექცევადი ელექტრომაგნიტური ძრავა გარე მაგნიტური როტორით და ცენტრალური სტატორის ელექტრომაგნიტით). მისი ეფექტურობა 100%-ზე მეტი არ არის მაგნიტური წრედის გახსნილობის გამო /3/. ეს EMD შემოწმებულია ექსპლუატაციაში (ხელმისაწვდომია განლაგების ფოტო).
სხვა EMD ასევე ცნობილია, მაგრამ მათ აქვთ დაახლოებით იგივე ოპერაციული პრინციპები. მაგრამ მიუხედავად ამისა, მსოფლიოში მაგნიტური ძრავების თეორიისა და პრაქტიკის განვითარება ჯერ კიდევ თანდათანობით მიმდინარეობს. და განსაკუთრებით ხელშესახები რეალური პროგრესი MD-ში გამოიკვეთა ზუსტად იაფფასიან კომბინირებულ მაგნიტო-ელექტრომაგნიტურ ძრავებში, მათში მაღალეფექტური მუდმივი მაგნიტების გამოყენებით. მსოფლიო საზოგადოებისთვის ასეთი მნიშვნელობის ამ უახლოეს ანალოგებს - მუდმივი მაგნიტური ძრავების პროტოტიპებს ეწოდება - ელექტრომაგნიტური ძრავის გენერატორები (EMDG) ელექტრომაგნიტებით და მუდმივი მაგნიტებით სტატორზე ან როტორზე. უფრო მეტიც, ისინი უკვე ნამდვილად არსებობენ, მუდმივად იხვეწებიან და ზოგიერთი მათგანი უკვე მასობრივი წარმოებაა. ინტერნეტში გამოჩნდა საკმაოდ ბევრი შეტყობინება და სტატიები მათი დიზაინის შესახებ ფოტოებით და მათი ექსპერიმენტული კვლევებით. მაგალითად, ცნობილია ეფექტური, უკვე გამოცდილი მეტალში, შედარებით იაფი ადამსის ელექტრომაგნიტური მოტორგენერატორები /1/. უფრო მეტიც, კომბინირებული EMDG-ების ზოგიერთმა უმარტივესმა დიზაინმა უკვე მიაღწია სერიულ წარმოებას და მასობრივ განხორციელებას. ეს არის, მაგალითად, შკონდინის სერიული ელექტრომაგნიტური ძრავა-ბორბლები, რომლებიც გამოიყენება ელექტრო ველოსიპედებზე.
თუმცა, ყველა ცნობილი EMDG-ის კონსტრუქციები და ენერგოინჟინერია ჯერ კიდევ საკმაოდ არაეფექტურია, რაც არ აძლევს მათ საშუალებას იმუშაონ „პერპეტუალური მოძრაობის“ რეჟიმში, ე.ი. გარე კვების წყაროს გარეშე.
მიუხედავად ამისა, არსებობს გზები ცნობილი EMDG-ების კონსტრუქციული და რადიკალური ენერგიის გაუმჯობესებისთვის. და სწორედ ასეთ უფრო ენერგიულად მოწინავე ვარიანტებს შეუძლიათ გაუმკლავდნენ ამ რთულ ამოცანას - სრულიად ავტონომიური ოპერაცია "მუდმივი" ელექტრომაგნიტური ძრავის გენერატორის რეჟიმში - გარე წყაროდან ელექტროენერგიის ყოველგვარი მოხმარების გარეშე და განიხილება ამ სტატიაში.
ეს სტატია ეძღვნება ახალი ტიპის მარტივი ელექტრომაგნიტური ძრავის გენერატორის ორიგინალური დიზაინის მუშაობის პრინციპის შემუშავებას და აღწერას სტატორზე რკალის ელექტრომაგნიტით და მხოლოდ ერთი მუდმივი მაგნიტით (PM) როტორზე. ამ PM-ის პოლარული ბრუნვა ელექტრომაგნიტის უფსკრულით, რომელიც საკმაოდ ფუნქციონირებს რეჟიმში "მუდმივი მოძრაობის გენერატორი".
ადრე და ნაწილობრივ, ასეთი უჩვეულო პოლარული EMD-ის ეს დიზაინი განსხვავებულ შექცევად ვერსიაში უკვე გამოცდილია სტატიის ავტორის არსებულ მაკეტებზე და აჩვენა ფუნქციონირება და საკმაოდ მაღალი ენერგეტიკული შესრულება.
მოდერნიზებული EMDG-ის დიზაინისა და ელექტრული წრედის აღწერა
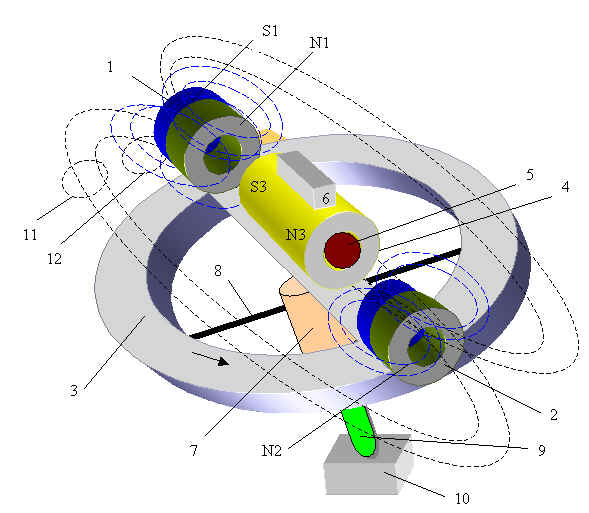
ნახ.1 ელექტრომაგნიტური ძრავის გენერატორი PM როტორზე, გარე ალტერნატიული დენის ელექტრომაგნიტი სტატორზე და ელექტრო გენერატორი მაგნიტურ როტორის ლილვზე
ამ ტიპის ელექტრომაგნიტური ძრავის გენერატორის (EMG) გამარტივებული დიზაინი და მისი ელექტრული ნაწილი ნაჩვენებია ნახ. 1. შედგება სამი ძირითადი ერთეულისაგან - უშუალოდ DM-დან ელექტრომაგნიტით სტატორზე და PM როტორზე და ელექტრომექანიკური გენერატორით იმავე ლილვზე DM-თან. MD მოწყობილობა შედგება სტატორის სტატიკური ელექტრომაგნიტი 1-ისგან, რომელიც დამზადებულია რგოლურ სეგმენტზე ამოკვეთით ან რკალის მაგნიტურ წრეზე 2, ამ ელექტრომაგნიტის ინდუქციური კოჭით 3 და ელექტრონული გადამრთველი დენის შებრუნებისთვის მასზე მიმაგრებულ კოჭში 3 და მუდმივი მაგნიტი (PM) 4 მყარად მოთავსებულია როტორ 5-ზე ამ ელექტრომაგნიტის სამუშაო უფსკრული 1. EMD-ის როტორის 5-ის ბრუნვის ლილვი დაკავშირებულია შეერთებით ელექტრული გენერატორის 8 ლილვთან 7. მოწყობილობა აღჭურვილია უმარტივესი რეგულატორით - ელექტრონული გადამრთველი 6, (ავტონომიური ინვერტორი), დამზადებულია მარტივი ხიდის ნახევრად კონტროლირებადი ავტონომიური ინვერტორის სქემის მიხედვით, რომელიც ელექტრონულად არის დაკავშირებული გამოსავალთან ინდუქციურ გრაგნილზე 3 ელექტრომაგნიტი 2 და ელექტრომომარაგების შეყვანის მეშვეობით - ელექტროენერგიის ავტონომიური წყარო 10. უფრო მეტიც, ელექტრომაგნიტი 1-ის შექცევადი ინდუქციური გრაგნილი 3 შედის ამ გადამრთველის ალტერნატიული დენის დიაგონალში 6 და DC მიკროსქემის მეშვეობით ეს გადამრთველი 6 უკავშირდება ბუფერულ DC წყაროს 10, მაგალითად, აკ. ელექტრო მანქანების გენერატორი 8-ის ელექტრული გამომავალი უკავშირდება ან პირდაპირ ინდუქციური კოჭის გრაგნილებს 3, ან შუალედური ელექტრონული გამსწორებლის მეშვეობით (არ არის ნაჩვენები) ბუფერული DC წყაროსთან (AB ტიპი) 7.
ხიდის უმარტივესი ელექტრონული გადამრთველი (ავტონომიური ინვერტორი) დამზადებულია 4 ნახევარგამტარულ სარქველზე, შეიცავს ორ დენის ტრანზისტორს 9 და ორ უმართავ უკონტაქტო კლავიშს ცალმხრივი გამტარობის (დიოდი) 10 ხიდის მკლავებში. პოზიციის ორი სენსორი 11. PM მაგნიტი ასევე მოთავსებულია 6 როტორის ამ MD 5-ის ელექტრომაგნიტურ სტატორ 1-ზე, მისი მოძრაობის ტრაექტორიასთან 15, და როგორც როტორის PM-მაგნიტის პოზიციის სენსორი, მაგნიტური მარტივი საკონტაქტო სენსორები. ველის სიძლიერე - გამოიყენება ლერწმის გადამრთველები. როტორის 5-ის მაგნიტის მე-4 პოზიციის ეს პოზიციის სენსორები მოთავსებულია კვადრატში - ერთი სენსორი მდებარეობს სოლენოიდის ბოლოს ბოძებით, ხოლო მეორე გადაადგილებულია 90 გრადუსით (რიდის ჩამრთველები), PM5-ის ბრუნვის გზასთან ახლოს. როტორი 6. ამ პოზიციის სენსორების გამომავალი როტორის 11 PM 5 არის ლერწმის ჩამრთველები, რელეები დაკავშირებულია გამაძლიერებელი ლოგიკური მოწყობილობის მეშვეობით 12 ტრანზისტორების საკონტროლო შეყვანებთან 9. სასარგებლო ელექტრული დატვირთვა 13 დაკავშირებულია გამომავალ გრაგნილთან. ელექტრული გენერატორი 8 გადამრთველის მეშვეობით (არ არის ნაჩვენები) გადართვა მუდმივი დაწყების ერთეულიდან ელექტრო გენერატორიდან 8-დან სრულ ელექტრომომარაგებაზე (არ არის ნაჩვენები).
ჩვენ აღვნიშნავთ ასეთი MD-ის დიზაინის მთავარ მახასიათებლებს ანალოგებთან შედარებით:
1. გამოყენებულია მრავალბრუნიანი ეკონომიური დაბალამპერიანი რკალის ელექტრომაგნიტი.
2. 5-ის როტორის მუდმივი მაგნიტი 4 ბრუნავს რკალის ელექტრომაგნიტის 1-ის უფსკრულით, სწორედ PM 5-ის მიზიდულობისა და მოგერიების მაგნიტური ძალებით. მაგნიტური პოლუსების მაგნიტური პოლარობის ცვლილების გამო. ეს ელექტრომაგნიტი, როდესაც დენის მიმართულება ელექტრომაგნიტის 3 კოჭშია 1 ბრძანება პოზიციის სენსორების 11 PM მაგნიტის 4 როტორის 5. ჩვენ ასევე აღვნიშნავთ, რომ მიზანშეწონილია როტორი 5 მასიური გახდეს არამაგნიტური მასალისგან, რათა შეასრულოს ინერტიოიდური მფრინავის სასარგებლო ფუნქცია.
შექცევადი ელექტრომაგნიტური ძრავა როტორზე გარე PM-ით
პრინციპში, ასევე შესაძლებელია EMD დიზაინის შექცევადი ვერსია, რომელშიც როტორი რგოლზე მუდმივი მაგნიტი PM მოთავსებულია ელექტრომაგნიტის გარეთ. ადრე, შექცევადი EMD-ის ასეთი ვარიანტი შეიმუშავა სტატიის ავტორმა, შექმნა და წარმატებით გამოსცადა სამუშაოში და ჯერ კიდევ 1986 წელს. ქვემოთ, ნახ. 2,3-ში, ასევე არის გამარტივებული დიზაინი ასეთი ადრე გამოცდილი. EMDG, ადრე აღწერილი ავტორის სტატიებში /2-3/
უმარტივესი EMD-ის განლაგების დიზაინი (არასრული) როტორზე გარე მუდმივი მაგნიტით და ამოღებული EMD სტატორის ელექტრომაგნიტით ნაჩვენებია ფოტოზე (ნახ. 3). სინამდვილეში, ელექტრომაგნიტი რეგულარულად მოთავსებულია ცილინდრული დიელექტრიკული არამაგნიტური გამჭვირვალე ცილინდრის ცენტრში ზედა საფარით, რომელზედაც დამონტაჟებულია ამ EMD-ის ბრუნვის ლილვი. გადამრთველი და სხვა ელექტრიკა არ არის ნაჩვენები ფოტოზე.
ნახ.2 შექცევადი EMDG გარე MP-მაგნიტური როტორით (არასრული დიზაინი)
აღნიშვნები:
1. მუდმივი მაგნიტი (PM1)
2. მუდმივი მაგნიტი (PM2)
3. EMD რგოლოვანი როტორი (PM1.2 მყარად მოთავსებულია როტორზე)
4. ფიქსირებული სტატორის ელექტრომაგნიტის გრაგნილი (დამოუკიდებელი საკიდი)
5. სოლენოიდის მაგნიტური წრე
6. PM როტორის პოზიციის სენსორები
7. როტორის ლილვი (არამაგნიტური საკისარი)
8. რგოლოვანი როტორისა და მისი ლილვის მექანიკური შეერთების სპიკები
9. საყრდენი ლილვი
10. მხარდაჭერა
11. ელექტრომაგნიტის დენის მაგნიტური ხაზები
12. მუდმივი მაგნიტის მაგნიტური ხაზები ისარი გვიჩვენებს 3 როტორის ბრუნვის მიმართულებას

ნახ.3 უმარტივესი EMDG განლაგების ფოტო (ელექტრომაგნიტი ამოღებულია)
"მუდმივი" ელექტრომაგნიტური ძრავის გენერატორის მუშაობის აღწერა (ნახ. 1)
მოწყობილობა - ეს მუდმივი ელექტრომაგნიტური ძრავა - გენერატორი (ნახ. 1) მუშაობს შემდეგნაირად.
მაგნიტური როტორის EMDG გაშვება და აჩქარება სტაბილურ სიჩქარემდე
EMDG იწყება ელექტრული დენის გამოყენებით ელექტრომაგნიტის 2-ის ხვეულზე 3 ელექტრომომარაგების განყოფილებიდან 10. როტორის მუდმივი მაგნიტის 4 მაგნიტური პოლუსების საწყისი პოზიცია პერპენდიკულარულია ელექტრომაგნიტის 2-ის უფსკრულის მიმართ. პოლარობა. ელექტრომაგნიტის მაგნიტური პოლუსები ამ შემთხვევაში ხდება ისე, რომ 5-ის როტორის მუდმივი მაგნიტი 4 იწყებს ბრუნვას ბრუნვის ღერძზე 16, მაგნიტური ძალებით, რომელიც იზიდავს მისი მაგნიტური პოლუსებით ელექტრომაგნიტის 2-ის საპირისპირო მაგნიტურ პოლუსს. მაგნიტის 4-ის საპირისპირო მაგნიტური პოლუსების და ელექტრომაგნიტის 2-ის უფსკრულის ბოლოების დამთხვევის მომენტში, დენი 3 კოჭში გამორთულია მაგნიტური ლერწმის რელეს ბრძანებით (ან ამ დენის სინუსოიდი გადის ნულზე) და ინერციით, მასიური როტორი გადის მისი ტრაექტორიის ამ მკვდარ წერტილს PM 4-თან ერთად. ამის შემდეგ, დენის მიმართულება ხვეულ 3-ში იცვლება და ელექტრომაგნიტის 2-ის მაგნიტური პოლუსები ამ სამუშაო უფსკრულის იგივე ხდება, რაც მაგნიტური. მუდმივი მაგნიტის პოლუსები 4. შედეგად, მაგნიტური მოგერიების ძალები იგივე მაგნიტური პოლუსების ia - როტორის მუდმივი მაგნიტი 4 და თავად როტორი იღებს დამატებით აჩქარების მომენტს, რომელიც მოქმედებს როტორის იმავე მიმართულებით ბრუნვის მიმართულებით. PM როტორის მაგნიტური პოლუსების პოზიციის მიღწევის შემდეგ - როგორც ის ბრუნავს - მაგნიტური მერიდიანის გასწვრივ, კოჭში 3 კვლავ შეცვალეთ დენის მიმართულება მეორე მაგნიტური პოზიციის სენსორის 11 ბრძანებით, მაგნიტური პოლუსების შებრუნება. ელექტრომაგნიტი 2 კვლავ ჩნდება სამუშაო უფსკრულში და მუდმივი მაგნიტი 4 კვლავ იწყებს მიზიდვას ელექტრომაგნიტის 2 უახლოეს საპირისპირო მაგნიტურ პოლუსებთან მის უფსკრულის ბრუნვის მიმართულებით. შემდეგ კი PM 4-ისა და როტორის აჩქარების პროცესი - კოჭში 3-ში ელექტრული დენის ციკლური შებრუნებით, 7-ის გადამრთველის 8 ტრანზისტორების ციკლით, როტორის PM-ის პოზიციის 11 სენსორებიდან არაერთხელ მეორდება ციკლურად. და ამავდროულად, როგორც PM 4 და როტორი 5 აჩქარებს, ელექტრული დენის შებრუნების სიხშირე ხვეულ 3-ში ავტომატურად იზრდება, ამ ელექტრომექანიკურ სისტემაში დადებითი უკუკავშირის არსებობის გამო მიკროსქემის გასწვრივ კომუტატორისა და პოზიციის სენსორების საშუალებით. როტორის PM 4.
გაითვალისწინეთ, რომ ელექტრული დენის მიმართულება ხვეულ 3-ში (ნაჩვენებია ისრებით ნახ. 1-ში) იცვლება იმისდა მიხედვით, თუ რომელი ტრანზისტორებიდან 8 არის გახსნილი 7. ტრანზისტორების გადართვის სიხშირის შეცვლით, ჩვენ ვცვლით ალტერნატიული დენის სიხშირეს ელექტრომაგნიტის 3 კოჭში და, შესაბამისად, ვცვლით როტორი 5-ის PM 4-ის ბრუნვის სიჩქარეს.
დასკვნა: ამრიგად, როტორის მუდმივი მაგნიტი მისი ღერძის გარშემო სრული ბრუნვისთვის თითქმის განუწყვეტლივ განიცდის ცალმხრივ აჩქარების მომენტს ელექტრომაგნიტის მაგნიტურ პოლუსებთან ძალის მაგნიტური ურთიერთქმედებიდან, რაც აყენებს მას ბრუნვაში და თანდათან აჩქარებს მას და ელექტრო გენერატორს. საერთო ბრუნვის ლილვზე მოცემული სტაბილური სიჩქარის ბრუნვამდე.
სტატორის ელექტრომაგნიტის EMDG გრაგნილის ელექტრული კონტროლის პირდაპირი მეთოდი როტორის PM-ის პოზიციიდან გამომდინარე
დამატებითი ინოვაცია 3 MD ელექტრომაგნიტის გრაგნილის კონტროლის ასეთი მეთოდის უზრუნველსაყოფად საჭირო სიხშირის და ფაზის ალტერნატიული დენით უშუალოდ ალტერნატიული დენის გენერატორის გამომავალიდან მდგრად მდგომარეობაში მუშაობისას არის მაგნიტური ძრავის ასეთ სისტემაში დანერგვა. - ელექტრული გენერატორი - პარალელური რეზონანსული L-C წრე - წრეში არის ორი ინდუქცია - კოჭიდან 3 და გენერატორის სტატორის გრაგნილიდან და დამატებითი ელექტრული კონდენსატორის 17-ის დამატებითი ელექტრული სიმძლავრის შეყვანა გენერატორი 8-ის გამომავალ ელექტრულ წრეში. მისი თვითაგზნება და შემდგომი ელექტრული L-C რეზონანსი, ელექტრული დანაკარგების შესამცირებლად და ინდუქციური 3-ის უკიდურესად მარტივი კონტროლისთვის სასურველი ძაბვისა და დენის ფაზის ალტერნატიული დენით პირდაპირ გენერატორიდან 8.
სრულად ავტონომიური რეჟიმი ("perpetuum mobile") EMDG
სავსებით აშკარაა, რომ ამ მოწყობილობის მუშაობის უზრუნველსაყოფად "მუდმივი მოძრაობის" რეჟიმში, აუცილებელია როტორის მუდმივი მაგნიტებიდან თავისუფალი ენერგიის მიღება, რაც საკმარისია საჭირო EMD ლილვზე ელექტრო გენერატორის წარმოქმნისთვის. სისტემის ამ სრულიად ავტონომიური მუშაობისთვის - ელექტროენერგია. აქედან გამომდინარე, ყველაზე მნიშვნელოვანი პირობაა უზრუნველყოს, რომ ამ MD-ის მაგნიტურ როტორს ჰქონდეს საკმარისი ბრუნვის მომენტი მის ლილვზე საკმარისი რაოდენობის ელექტროენერგიის წარმოქმნისთვის, რაც საკმარისზე მეტი იქნება ელექტრომაგნიტური კოჭის, მოცემული მნიშვნელობის დატვირთვისა და კომპენსაციისთვის. სხვადასხვა გარდაუვალი დანაკარგებისთვის ასეთ ელექტრომექანიკურ სისტემებში როტორზე PM-ით. მას შემდეგ, რაც PM 4 იხსნება და როტორი მიაღწევს 5 ნომინალურ ბრუნს, ჩვენ ვცვლით კოჭის 3-ის ელექტრომომარაგებას უშუალოდ ელექტრო გენერატორიდან ან დამატებითი ძაბვის გადამყვანის საშუალებით და დამწყებ დენის წყარო მთლიანად გამორთულია ან გადადის დატენვის რეჟიმში. ელექტრო გენერატორიდან ამ EMD-ის ლილვზე.
აუცილებელი სტრუქტურული აწყობა და კონტროლის ალგორითმები ამ მოტორ-გენერატორის "PPERP MOBILE"-ის რეჟიმში მუშაობისთვის
ეს მნიშვნელოვანი პირობა DM-ის მუშაობისთვის "მუდმივი მოძრაობის" რეჟიმში შეიძლება დაკმაყოფილდეს მხოლოდ იმ შემთხვევაში, თუ მინიმუმ ექვსი პირობა დაკმაყოფილებულია ერთდროულად:
1. თანამედროვე ძლიერი ნიობიუმის მუდმივი მაგნიტების გამოყენება MD-ებში, რომლებიც უზრუნველყოფენ ასეთი როტორის მაქსიმალურ ბრუნვას PM-ის მინიმალური ზომებით.
2. ეფექტური ულტრა იაფფასიანი MD ელექტრომაგნიტური მიკროსქემის გამოყენება MD სტატორზე ელექტრომაგნიტის გრაგნილების უკიდურესად მაღალი რაოდენობის ბრუნვის და მისი მაგნიტური წრედის და გრაგნილის სწორი და ეფექტური დიზაინის გამო.
3. სასტარტო მოწყობილობისა და ელექტროენერგიის დამწყებ წყაროს საჭიროება MD-ის დასაწყებად და დასაჩქარებლად ელექტრომაგნიტური კოჭის ელექტრომომარაგებით გადამრთველიდან.
4. სწორი ალგორითმი ელექტრომაგნიტის გრაგნილში ელექტრული დენის კონტროლის მიმართულებით, სიდიდეზე, როტორის PM-ის პოზიციიდან გამომდინარე.
5. ელექტრული გენერატორის ელექტრული პარამეტრების კოორდინაცია და ელექტრომაგნიტის გრაგნილი.
6. ელექტრომაგნიტური გრაგნილის ელექტრომომარაგების სქემების გადართვის სწორი ალგორითმი, როდესაც ელექტრული გენერატორის წრე ჩართულია ელექტრომაგნიტური გრაგნილის ელექტრომომარაგების წრეში და ელექტროენერგიის საწყისი წყარო, მაგალითად, AB, გადადის გამონადენის რეჟიმიდან. მისი ელექტრული დატენვის რეჟიმში.
ელექტრო დენის გადართვის ალგორითმი ელექტრომაგნიტის კოჭში EMD როტორის PM პოზიციის მიხედვით (ნახ. 1)
განვიხილოთ ელექტრული დენის გადართვის ალგორითმი ხვეულში EMD როტორზე ერთი ბარის მაგნიტის არსებობისას როტორის ერთ შემობრუნებაზე (ნახ. 3). ამ EMD-ის ეფექტური მუშაობის უზრუნველსაყოფად (ნახ. 1 დიზაინი) როტორის პოზიციისა და დენის მიმართულების კომბინირებული დიაგრამების გამოყენებით გრაგნილში 3 სტატორის ელექტრომაგნიტი 1. როგორც ამ დიაგრამებიდან ჩანს, ელექტრომაგნიტის 1 EMD მართვის სწორი ალგორითმის არსი არის ის, რომ PM როტორის ერთი სრული ბრუნი ელექტრული დენი ელექტრომაგნიტის ინდუქციურ გრაგნილში 3 აკეთებს ორ სრულ რხევას.. ანუ, სხვა სიტყვებით რომ ვთქვათ, ელექტრული სიხშირე დენი მიეწოდება ელექტრომაგნიტის 1 გრაგნილს მასზე დამაგრებული ელექტრონული გადამრთველის საშუალებით, კონტროლირებადი. როტორის PM პოზიციის სენსორების ბრძანებებით, უდრის როტორის სიჩქარის ორჯერ და ამ ელექტრული დენის ფაზა მკაცრად სინქრონიზებულია როტორის PM პოზიციასთან. EMD. მას შემდეგ, რაც გადამრთველი ცვლის დენის მიმართულებას გრაგნილში 3 (მიმდინარე საპირისპირო) ხდება მკაცრად PM-ის მაგნიტურ ეკვატორზე, როდესაც PM-ის მაგნიტური პოლუსები და მაგნიტური წრედის ბოლოების მაგნიტური პოლუსები ემთხვევა სამუშაო უფსკრული. ელექტრომაგნიტი 1-ის მაგნიტური წრე 2, შემდეგ, შედეგად, როტორის PM-ის ერთი სრული ბრუნვისთვის, ის მუდმივად განიცდის ცალმხრივი ბრუნვის აჩქარებას და ორჯერ მაგნიტური წრის ბოლოების საპირისპირო მაგნიტური პოლუსების მიზიდვისგან. ელექტრომაგნიტი და როტორის PM და ორჯერ - მათი მსგავსი მაგნიტური პოლუსების მოგერიების მაგნიტური ძალების გამო.
ნახ.4 ელექტრონული გადამრთველის მუშაობის დროის დიაგრამა სტატორის ელექტრომაგნიტის გრაგნილში დენის შებრუნებისთვის როტორის PM-ის ერთი ბრუნისთვის
ნახ.5 მაგნიტური პოლუსების მონაცვლეობის ციკლოგრამა ელექტრომაგნიტის უფსკრულისთვის EMDG როტორის PM-ის ერთი შემობრუნებისთვის.
ელექტრომაგნიტის EMD ალგორითმის ახსნას:
3.4 - რკალის მაგნიტური წრის ბოლოების მაგნიტური ბოძები 1 ელექტრომაგნიტი 1
ხვეული გრაგნილით 3 მოთავსებულია ელექტრომაგნიტი 1-ის მაგნიტურ წრეზე 2
9. როტორის მაგნიტი