Schemat włączania silnika poprzez miękki start. Modyfikacje trójfazowe. Wybór softstartu
Urządzenie miękki start motor (w skrócie SC) to mechanizm służący do ograniczania wzrostu charakterystyk rozruchowych. Sprawia, że procesy rozruchu i zatrzymywania silnika są miękkie, chroniąc go przed przegrzaniem i szarpaniem oraz wydłużając żywotność. Dotyczy tylko silniki indukcyjne.
Przy bezpośrednim uruchomieniu silnika moment obrotowy osiąga 150-200% wartości nominalnej. Jednocześnie powstają prądy rozruchowe, które przekraczają prąd znamionowy 5 lub nawet więcej razy. Podwyższone charakterystyki podczas rozruchu silnika powodują problemy:
Niektóre niewrażliwe urządzenia mają. W przypadku, gdy na rysunku 13 płynie tylko prąd liniowy, a przez przewód neutralny nie płynie prąd, dwa tyrystory o różnych fazach muszą poruszać się jednocześnie. Jednakże Napięcie znamionowe w zasadzie to samo.
W tym schemacie sześć terminale obciążenia takich jak silnik. Aby prąd płynął w obciążeniu, dwa lub trzy tyrystory o różnych fazach muszą prowadzić do czasu, a jeden impuls w bramce zawodzi, ponieważ chwilowe czasy przełączania w każdym tyrystorze są różne. Kiedy to jest obciążenie indukcyjne, obecne zachowanie jest jednofazowe, które jest zwracane do ciągu impulsów jako wyzwolenie bramki. W przypadku obciążenia rezystancyjnego tyrystor może jeździć napięcie sieciowe tylko zanim przewodzenie może rozpocząć się na 30 i skończyć na 180, wtedy zakres kąta przewodzenia tyrystora jest solo.
- Uszkodzenie izolacji uzwojeń i przerwanie pracy z powodu przegrzania.
- Awaria łańcucha kinematycznego drutu z powodu zerwania taśm przenośnikowych, szarpnięć mechanicznych lub wstrząsów hydraulicznych.
- Trudny start uniemożliwiający jego ukończenie.
To właśnie te problemy powodują silnik elektryczny potrzeba softstartu. Dzięki niemu silnik przyspiesza płynnie, bez szarpnięć i wstrząsów. Prądy rozruchowe są zmniejszone. Dlatego zadowalający stan izolacji utrzyma się przez długi czas.
Stąd kolejność wyzwalaczy dla grupy sterującej prądem wychodzącym; α, α plus 10 i α plus 40, i podobnie dzieje się z tyrystorami, które sterują prąd wsteczny; α plus 180, α plus 300 i α plus 40 lub α większe. W zależności od wartości kąta przewodzenia α istnieją trzy różne tryby przełączania dla tyrystorów.
Następnie naprężenia w obciążeniu zgodnie z rys. 9 może być równe zeru lub połowie napięcia linii. Tak więc analiza składa się z dwóch części; pierwszy, gdy istnieją trzy tyrystory o różnych fazach, które jednocześnie generują napięcie obciążenia podobne do napięcia fazy wejściowej, a drugi, gdy wykonywane są tylko dwa urządzenia, a napięcie obciążenia będzie o połowę mniejsze niż napięcie sieciowe. Te dwa warunki przełączania zmieniają się.
Ale jak zrozumieć, że start jest trudny, a silnik musi być wyposażony w softstart? Aby to zrobić, zapoznaj się z opisem trzech przypadków tego zjawiska:
- Uruchamianie zbyt trudne dla używanego źródła zasilania. Potrzebny jest prąd z sieci, który może wygenerować tylko podczas „pracy na zużycie” lub w ogóle nie może wytworzyć takiej wartości. Przy próbie uruchomienia na wejściu systemu maszyny są wycinane, żarówki są wyłączone. Niektóre styczniki i przekaźniki transferowe są wyłączone, a agregat prądotwórczy przestaje działać. W takim przypadku softstart pomoże, jeśli sieć zasilająca może dostarczyć 250% prądu znamionowego zamiast 500-800%, które przekraczały jego moc. Jeśli sieć nie daje nawet 250%, nie ma sensu instalować softstartu.
- Silnik nie uruchamia się bezpośrednio (nie kręci się lub nie przyspiesza do żądanej prędkości, powodując zadziałanie systemu zabezpieczającego). Softstart nie pomoże, ale możesz spróbować poprawić sytuację za pomocą przetwornicy częstotliwości.
- Start jest doskonały, ale maszyna wyłącza się na wejściu jeszcze przed ustawieniem częstotliwości nominalnej. SCP może pomóc, ale nie musi. Im prędkość jest bliższa Wartość nominalna w momencie uruchomienia maszyny, tym większa szansa na sukces.
Zaawansowane softstarty do silników asynchronicznych zapewniają dodatkowe funkcje:
W maszynach indukcyjnych krążą prądy przemienne w stojanie i wirniku. Uzwojenie stojana jest trójfazowe i ma dwa lub więcej biegunów, podobne do stosowanych w maszynach synchronicznych. Uzwojenie wirnika nie ma własnej mocy i może być typu uzwojenia lub białej klatki. W silniku asynchronicznym wirnik nie otrzymuje energii przez przewodzenie, ale przez indukcję. Tak więc silnik indukcyjny jest transformatorem z wtórnym uzwojeniem wirującym. Rysunek 15 Główne części bezszczotkowego silnika asynchronicznego.
- Zabezpieczenie przeciwzwarciowe podczas rozruchu;
- Zapobieganie zanikom faz;
- Wykluczenie wielokrotnego nieplanowanego włączania;
- Ochrona przed nadmiernym obciążeniem znamionowym.
Możesz użyć takich urządzeń nie tylko do zmiękczenia startu, ale także do płynnego zatrzymania silnika. Poniższy wykres przedstawia zależność prędkości obrotowej silnika od czasu podczas rozruchu bezpośredniego i przy użyciu łagodnego rozruchu (druga nazwa softstartu).
Silniki elektryczne poprawiają ich ochronę. Wydanie z marca Asynchroniczny stojan silnika. Korpus ze stali lub lekkiego stopu otacza cienkościenną koronę ze stali krzemowej. Arkusze są izolowane od siebie lakierami utleniającymi lub izolacyjnymi, jak pokazano na rysunku. Laminowanie obwodów magnetycznych zmniejsza straty spowodowane histerezą i prądami wirowymi lub prądami wirowymi.
Arkusze posiadają rowki, w których umieszcza się stałe uzwojenia, mające na celu wytworzenie pola wirującego. Każde uzwojenie składa się z kilku cewek. To ruchoma część silnika. Podobnie jak obwód magnetycznego stojana, składa się ze stosu cienkich arkuszy izolowanych od siebie i tworzy cylinder wokół wału lub wału silnika, jak pokazano na rysunku. Ten element, zgodnie ze swoją technologią, umożliwia rozróżnienie dwóch rodzin silników asynchronicznych: jednej, której wirnik jest oznaczony klatką, a drugiej, na wirniku uzwojenia, którego pierścienie są wskazane.
Dodatkowy bonus dla posiadaczy SCP: będzie można wybrać słabsze źródło nieprzerwana dostawa energii jeśli jest taka potrzeba.
Zasada działania softstartu
Startsofters to:
- Mechaniczny;
- Elektryczny.
Rozważ zasadę działania każdego typu SCP.
Mechaniczna kontrola charakterystyk rozruchowych
Najłatwiejszym sposobem na płynny rozruch silnika elektrycznego jest przymusowe powstrzymanie rosnącej prędkości obrotowej. Aby to zrobić, możesz użyć urządzenia, mechanicznie regulując obrót wału. Należą do nich klocki hamulcowe, stabilizatory strzału, blokady magnetyczne i sprzęgła hydrauliczne.
Rysunek 18 Główne części typowego wirnika. Solidny wirnik to zwykle prosta klatka. Klatka zamknięta jest dwoma mocnymi pierścieniami. Silniki te przy znamionowym momencie obrotowym mają duży poślizg. Jego moment rozruchowy jest wysoki, a prąd rozruchowy niski, jak pokazano na rysunku. Wirnik ma dużo strat i powoduje słabą wydajność silnika. 33. We wgłębieniach lub rowkach znajdujących się wzdłuż wirnika przewody są połączone na każdym końcu metalową koroną; te sterowniki wytwarzają moment obrotowy generowany przez wirujące pole.
W każdym przypadku zasada działania jest inna. Możesz sobie jednak wyobrazić, co dzieje się podczas mechanicznej kontroli prędkości na przykładzie obracającego się dysku: spróbuj dotknąć go jakimś przedmiotem. Pomiędzy nim a dyskiem powstaje siła tarcia, która będzie skierowana w kierunku Przeciwna strona dotyczące rotacji. Oznacza to, że dysk będzie potrzebował więcej czasu, aby przyspieszyć do ustawionej wartości. Prędkość będzie stopniowo wzrastać.
Aby para była jednorodna, przewody są lekko nachylone względem osi silnika. Wszystko ma wygląd białej klatki, stąd nazwa tego typu wirnika. Z reguły komórka białka jest całkowicie uformowana. Aluminium jest pompowane pod ciśnieniem, a żebra chłodzące umieszczone w tej samej operacji zapewniają zwarcie przewodów wirnika. Silniki te mają stosunkowo niski moment rozruchowy i prąd rozruchowy powyżej wartości znamionowej 19, w przeciwieństwie do tego mają bardzo mały poślizg przy znamionowym momencie obrotowym.
Stosowane są głównie przy dużych wydajnościach w celu poprawy wydajności instalacji z pompami i wentylatorami. Są one również sprzężone z przetwornicami częstotliwości o zmiennej prędkości, dzięki czemu problem momentu obrotowego i prądu rozruchowego jest całkowicie rozwiązany. Podwójny rotor obrotowy. Składa się z dwóch koncentrycznych ram, jednej zewnętrznej, o małym przekroju z wielki opór i kolejną wewnętrzną część większej sekcji z mniejszym oporem. Na początku prądy wirnika mają wysoką częstotliwość, a ze względu na efekt filmu cały prąd wirnika przepływa wokół obwodu wirnika, a zatem wzdłuż zredukowanej Przekrój w przewodnikach.
Urządzenia elektryczne do łagodnego rozruchu silników elektrycznych
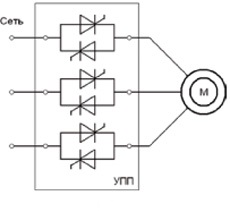
Zasada działania softstartów elektrycznych polega na ograniczaniu napięcia dostarczanego do silnika za pomocą tyrystorów połączonych równolegle, jak pokazano na poniższym rysunku.
Tak więc na początku rozruchu, przy dużych prądach o wysokiej częstotliwości, 34. Moment generowany przez stabilną klatkę zewnętrzną jest ważny nawet przy niewielkim natężeniu prądu. Pod koniec biegu częstotliwość w wirniku spada i przepływ prądu przez wewnętrzną klatkę staje się łatwiejszy. Silnik zachowuje się wtedy tak, jakby był zbudowany jako jedno ogniwo o niskiej rezystancji. W stanie ustalonym prędkość jest nieco niższa niż w przypadku silnika o pojedynczej mocy. Na ryc. 19 przedstawia krzywe prędkości obrotowej dla każdego typu wirnika.
Wydanie marcowe Rotor obrotowy. Przewody wirnika są uformowane w rowkach wirnika, które mają kształt trapezu, a mały bok trapezu znajduje się na zewnątrz wirnika. Działanie jest podobne do działania silnika dwublokowego: prąd wirnika zmienia się odwrotnie z jego częstotliwością.
Aby lepiej zrozumieć, jak działa startsofter, musisz bardziej szczegółowo przestudiować uruchomienie. Teoretycznie jest to proces zamiany energii elektrycznej na kinetyczną. W tym przypadku rezystancja silnika z małej wartości, charakterystycznej dla silnika nieobrotowego, wzrasta do dużej, gdy prędkość znamionowa została już osiągnięta. I zgodnie z prawem Ohma (I \u003d U / R) w momencie początkowym prąd jest maksymalny.
A zatem: na początku rozruchu moment obrotowy jest wyższy, a prąd mniejszy. W trybie stacjonarnym prędkość jest zasadniczo równa prędkości pojedynczego separatora. 35. W rowkach na obwodzie wirnika umieszczone są uzwojenia identyczne jak zwoje stojana. Zwykle wirnik jest trójfazowy. Jeden koniec każdego z uzwojeń jest połączony ze wspólnym punktem. Wolne końce można podłączyć do złącza odśrodkowego lub do trzech izolowanych miedzianych pierścieni, które obracają się wraz z wirnikiem. Na tych pierścieniach odwróć szczotki na bazie grafitu podłączone do rozrusznika.
W zależności od wartości rezystorów włożonych w obwód wirnika, ten typ silnika może wytworzyć moment rozruchowy do 5 razy większy od momentu znamionowego. Prąd rozruchowy jest prawie proporcjonalny do momentu obrotowego wytwarzanego na wale silnika. To rozwiązanie jest wycofywane z systemów elektronicznych związanych ze standardowymi silnikami. Nie może być żadnego momentu obrotowego, chyba że indukowany prąd przepływa przez pętlę. Ten moment obrotowy zależy od prądu przepływającego przez pętlę i nie może istnieć, chyba że nastąpi zmiana strumienia w pętli.
Wzór na energię to: E=P*t=U*I*t. A ponieważ prąd jest maksymalny na początku startu, energia musi być przekazywana bardzo szybko. Jeśli podłączysz silnik elektryczny do sieci własnymi rękami przez softstarter, druga formuła zadziała na wejściu do urządzenia. Energia będzie dostarczana bardzo szybko, ale wydajność będzie powolna. Osiąga się to poprzez ograniczenie napięcia w celu kontrolowania wzrostu prądu rozruchowego. A ponieważ prąd ma tę samą wartość w obu formułach, można zauważyć, że im niższa siła prądu, tym więcej czasu zajmie przyspieszenie. Ale przyspieszenie będzie płynne.
Dlatego konieczna jest różnica prędkości między zakrętem a polem wirującym. Z tego powodu silnik elektryczny działający zgodnie z tą zasadą nazywany jest silnikiem indukcyjnym. Dlatego przy rozruchu częstotliwość prądu wirnika jest maksymalna. Silniki elektryczne poprawiające ich ochronę. Krzywa charakterystyczna momentu obrotowego silnika indukcyjnego, podana przy 0 i 1, daje kilka ważnych informacji na temat pracy silników indukcyjnych. Indukowany moment obrotowy silnika wynosi zero przy prędkości synchronicznej.
Ważny! Mimo konieczności zmniejszenia prądów rozruchowych nie należy ich ustawiać zbyt nisko. W przeciwnym razie silnik nie będzie w stanie przyspieszyć. Zwykle wystarczy zmniejszyć prąd do 250% prądu znamionowego (przy rozruchu bezpośrednim jest to 500-800%).
Zarządzanie rozrusznikami elektrycznymi
Istnieją dwa rodzaje urządzenia elektryczne zmiękczenie procesu startu:
Krzywa momentu obrotowego jest w przybliżeniu liniowa między próżnią a pełnym obciążeniem; ponieważ wraz ze wzrostem poślizgu następuje liniowy wzrost: prądu wirnika, pola magnetycznego wirnika i indukowanego momentu obrotowego. Maksymalny lub odchylający moment obrotowy jest równy lub 3-krotny momentem znamionowym i nie może zostać przekroczony. Rysunek 0 Charakterystyka momentu dla silnika asynchronicznego.
Samochody elektryczne. Wydanie III. Dla danego poślizgu moment indukcyjny zmienia się wraz z kwadratem przyłożonego napięcia. Fakt ten jest przydatny do kontrolowania prędkości silników indukcyjnych. Maszyna indukcyjna w rzadkich przypadkach pracuje jako generator, ponieważ praca w tym trybie jest nieefektywna, dzieje się tak, gdy prędkość wirnika jest większa niż synchroniczna. W celu szybkiego wyhamowania silnika załączane są dwie fazy, co oznacza zmianę kierunku obrotów pole magnetyczne.
- Z kontrolą amplitudy;
- z kontrolą fazy.
Działanie softstartu amplitudowego polega na stopniowym zwiększaniu napięcia na zaciskach silnika do wartości maksymalnej. Takie urządzenia pomagają uruchamiać silniki elektryczne w trybie jałowym lub przy małym obciążeniu.
Zmiękczacze rozruchu fazowego regulują charakterystykę częstotliwościową prądu fazowego bez zmniejszania napięcia. Pozwala to zachować dużą moc silnika, którą można uruchomić nawet przy dużym obciążeniu. Możesz ustawić płynny wzrost częstotliwości obrotowej nawet w trybie pracy. To ważna cecha, dzięki której można zmieniać prędkość wału bez utraty mocy.
Rysunek 1 Krzywa momentu obrotowego przedstawiająca rozszerzone zakresy pracy. Klasy projektowania silników asynchronicznych. Krajowe Stowarzyszenie Producentów Elektrycznych w Stanach Zjednoczonych oraz Międzynarodowa Komisja Elektrotechniczna w Europie opracowały system identyfikacji liter dla silników komercyjnych. Możliwe jest uzyskanie różnych krzywych momentu obrotowego, jak pokazano na rysunku, zmieniając charakterystykę wirnika silników indukcyjnych. Aby pomóc branży w doborze odpowiednich silników do różnych zastosowań w całym zakresie mocy.
Wyposażenie silnika w softstart, czy nie, zależy od Ciebie, o ile nie wyłączy się w połowie przyspieszania. Należy jednak pamiętać, że za granicą zabronione jest używanie silników o mocy większej niż 15 000 watów bez łagodniejszego rozruchu. Próba zaoszczędzenia na softstarterze może doprowadzić do przedwczesnego zużycia mechanizmu. Jeśli naprawdę nie chcesz dużo wydawać, po prostu zainstaluj urządzenie własnymi rękami, ale koniecznie je kup.
Rysunek Typowe krzywe charakterystyczne dla różnych konstrukcji wirników. Mają standardową konstrukcję z normalnym momentem rozruchowym, normalnym prąd rozruchowy i niski poślizg. Całkowity poślizg obciążenia silników klasy A musi być mniejszy niż 5%. Moment rozruchowy tej konstrukcji jest co najmniej nominalny duże silniki i wynosi co najmniej 00% znamionowego momentu obrotowego małych silników. Głównym problemem przy tego typu konstrukcji jest niezwykle wysoki prąd rozruchowy.
Jeśli moc przekracza 5 KM należy zastosować jakąś formę wyzwalania, aby uniknąć problemów ze spadkiem napięcia w systemie elektroenergetycznym, do którego są podłączone. Silniki te są stosowane w wentylatorach, dmuchawach, pompach, tokarkach i innych maszynach. 39. Są to tak zwane silniki ogólnego przeznaczenia, a większość silników wirnikowych jest tego typu. wirnik klatkowy, mają normalny moment rozruchowy, niski prąd rozruchowy i niski poślizg. Ten silnik wytwarza prawie taki sam moment rozruchowy jak silnik klasy A, przy 5% mniej prądu.
Efektywne wykorzystanie softstartów (SCD) jest możliwe tylko wtedy, gdy ocena jest prawidłowo dobrana. Kluczowymi kryteriami wyboru są zazwyczaj rodzaj obciążenia silnika, częstotliwość rozruchów oraz dane z tabliczki znamionowej.
Wyjściowe charakterystyki urządzeń mogą znacznie różnić się od siebie, a ich wartości zależą od zakresu rozwiązywanych zadań. Dlatego przy wyborze softstartu do silników asynchronicznych tak ważne jest rozważenie zakresu jego przyszłego zastosowania.
Cechy początkowe można z grubsza podzielić na trzy kategorie.
Tryby pracy softstartera
Tryb normalny jest ograniczony wartością prądów rozruchowych na poziomie 3,5 x Inom, z czasem rozruchu od 10 do 20 sekund.
Heavy duty charakteryzuje się obciążeniami o nieco wyższym momencie bezwładności. Prądy rozruchowe są ograniczone do 4,5 x I nom, a czas przyspieszania wynosi 30 sekund.
Bardzo duże obciążenie oznacza bardzo duże momenty bezwładności. Prądy rozruchowe osiągają poziom 5,5 x I nom, a czas przyspieszania może znacznie przekroczyć 30 sekund.
Rodzaje SCP
Schemat Działanie softstartu może być jednym z czterech typów:
1. Rozruchowe regulatory momentu obrotowego sterować tylko jedną fazą trójfazowego silnika asynchronicznego. Chociaż ten rodzaj sterowania jest w stanie kontrolować łagodny rozruch, nie zapewnia żadnej redukcji prądów rozruchowych.
W rzeczywistości, gdy stosowane są regulatory momentu rozruchowego, prąd na uzwojeniach silnika jest w przybliżeniu równy prądowi uzyskiwanemu przy rozruchu bezpośrednim. Jednocześnie prąd ten płynie przez uzwojenia dłużej niż w przypadku rozruchu bezpośredniego, przez co silnik może się przegrzać.
Urządzenia tego typu nie mogą być stosowane do napędów, które muszą zmniejszać prądy rozruchowe. Nie mogą zapewnić rozruchu mechanizmów o dużej bezwładności (ze względu na niebezpieczeństwo przegrzania silnika), a także częstych uruchomień/zatrzymań napędu.
2. Regulatory napięcia bez sygnału zwrotnego może działać tylko zgodnie z zakodowanym na stałe programem użytkownika. Nie ma sprzężenia zwrotnego z silnika, więc nie mogą zmienić prędkości silnika, dostosowując ją do zmieniającego się obciążenia. W przeciwnym razie spełniają wszystkie wymagania dotyczące softstartów i są w stanie kontrolować wszystkie fazy silnika. Są to chyba najbardziej popularne miękkie startery.
Tabela 1 Tryb pracy w zależności od aplikacji
Schemat rozruch silnika jest określany przez wstępne ustawienie napięcia rozruchowego, a także czasu wymaganego do rozruchu. Wiele urządzeń tego typu może również ograniczać wielkość prądu rozruchowego – osiąga się to poprzez zmniejszenie napięcia przy rozruchu. Oczywiście takie regulatory są również w stanie kontrolować zwalnianie mechanizmu, wykonując płynne i długotrwałe zatrzymanie.
Regulatory dwufazowe mogą zmniejszać napięcie w trzech fazach, ale prąd jest niezrównoważony.
3. Regulatory napięcia z sygnałem informacja zwrotna to ulepszone wersje urządzeń opisanych powyżej. Są w stanie odczytać wartość prądu i dostosować napięcie, aby prąd nie wykraczał poza zdefiniowane przez użytkownika limity. Odebrane dane są również wykorzystywane do obsługi różnych zabezpieczeń (przed asymetrią faz, przeciążeniem itp.).
Taki softstart do silników asynchronicznych można zgrupować z innymi podobnymi urządzeniami w jeden system sterowania silnikiem.
4. Regulatory prądu z sygnałem zwrotnym. To są najnowocześniejsze miękkie startery. Schemat praca opiera się na regulacji natężenia prądu, a nie napięcia, jak w poprzednich modelach. Zapewnia to lepszą dokładność sterowania, łatwiejsze programowanie i szybszą konfigurację urządzenia – w końcu większość parametrów tutaj ustalana jest automatycznie, bez konieczności ręcznego wprowadzania.
Rozpoczęcie podnapięciowe
W momencie takiego startu prąd płynący przez silnik jest równy prądowi w przypadku zablokowania wirnika. Silnik w tym czasie przyspiesza, a moment w pewnym momencie staje się wyższy od wartości nominalnej, po czym dochodzi do wartości nominalnej. Charakter zmiany prądu i momentu obrotowego zależy od konstrukcji i modelu każdego konkretnego silnika.
Należy zauważyć, że proces uruchamiania silników różnych modeli, ale mających te same cechy, może być bardzo różny. Prąd rozruchowy może mieścić się w zakresie 500%-700% wartości znamionowej, a moment obrotowy może wynosić od 70% do 230%!
Takie cechy są poważną przeszkodą w pracy tego gatunku. softstarty do silników asynchronicznych. Dlatego jeśli Twoim zadaniem jest uzyskanie wysokiego momentu rozruchowego przy minimalnym prądzie rozruchowym, musisz wybrać odpowiednie silniki.
Jak już pokazano, moment rozruchowy silnika ma kwadratową zależność od natężenia prądu.
Należy pamiętać, że redukcja prądu musi być ograniczona: jeśli moment rozruchowy stanie się mniejszy niż moment obciążenia, przyspieszenie zostanie zatrzymane, a silnik nie osiągnie prędkości znamionowej.
Rozruszniki Delta/Wye
Chociaż przystawki tego typu są najczęstszym typem softstarty, schemat trójkąt/gwiazda nie pozwala na pracę pod dużym obciążeniem.
Najpierw przy rozruchu silnik jest połączony „w gwiazdę”, a wartość momentu obrotowego i prądu jest równa jednej trzeciej wartości nominalnej. Pod koniec określonego interwału napęd wyłącza się i włącza ponownie, ale już zgodnie ze schematem „trójkąta”.
Rozruch będzie skuteczny, jeśli podczas przyspieszania gwiazdowego silnik może rozwinąć moment obrotowy niezbędny do uzyskania wystarczającej prędkości do przełączenia na trójkąt. Jeśli dzieje się to przy prędkości znacznie mniejszej niż znamionowa, to prąd podczas takiego rozruchu nie będzie się znacząco różnił od prądu rozruchu bezpośredniego, co oznacza, że użytkowanie urządzenia nie ma sensu.
Oprócz wybuchowych skoków prądu i momentu obrotowego w momencie przełączenia silnika na pracę w trójkąt zachodzą inne złożone procesy przejściowe. Ich amplituda zależy od amplitudy i fazy napięcia wytwarzanego przez silnik podczas przełączania.
W najgorszym przypadku napięcie może być takie samo jak w sieci, ale być w przeciwfazie. Wtedy prąd dwukrotnie przekroczy wartość nominalną, a moment, zgodnie z powyższym wzorem, czterokrotnie.
Rozruszniki z autotransformatorem
W konstrukcji takich rozruszników stosuje się autotransformator do zmniejszenia napięcia dostarczanego do silnika. Do stopniowej regulacji prądu rozruchowego i momentu obrotowego stosuje się specjalne odczepy. Pełna prędkość obrotowa wału silnika jest osiągana do momentu przejścia na napięcie znamionowe, a udary prądowe są zminimalizowane. Jednocześnie ze względu na stopniowy charakter regulacji niemożliwe jest osiągnięcie wysokich wskaźników dokładności.
Rozrusznik z autotransformatorem, w przeciwieństwie do poprzedniego (delta/gwiazda), charakteryzuje się zamkniętymi stanami przejściowymi. Oznacza to, że podczas przyspieszania silnika nie ma ostrych stanów nieustalonych w krzywych momentu obrotowego i prądu.
Ze względu na spadek napięcia na autotransformatorze moment obrotowy maleje przy każdej prędkości silnika. Przy dużym obciążeniu bezwładności przemiennika czas rozruchu może przekroczyć dopuszczalne (bezpieczne) limity, a przy zmiennym obciążeniu zachowanie systemu staje się nieoptymalne.
Rozruszniki z autotransformatorem stosuje się zwykle z częstotliwością rozruchów do 3 szt./godz. , zaprojektowane z myślą o częstszych rozruchach lub mocniejszym obciążeniu, są większe i znacznie droższe.
Rozruszniki z wbudowanymi rezystorami w obwodzie stojana
Takie rozruszniki wykorzystują rezystory płynne lub metalowe, aby zmniejszyć napięcie przyłożone do stojana. Przy odpowiednim doborze rezystorów takie urządzenia zapewniają dobrą redukcję momentu obrotowego i prądu rozruchowego silnika.
Dokładnego doboru rezystorów należy dokonać już na etapie projektowania, biorąc pod uwagę wszystkie parametry silnika, jego tryby pracy oraz planowane obciążenie. Jednak takie informacje nie zawsze są dostępne, a gdy rezystory są niedokładnie dobrane, jakość i niezawodność rozrusznika pozostaje niska.
Osobliwością takiego obwodu jest to, że rezystancja rezystorów zmienia się podczas pracy z powodu ich nagrzewania. Ze względu na niebezpieczeństwo przegrzania rozruszniki z rezystorami nie są używane do pracy z maszynami i mechanizmami o dużej bezwładności.
Softstarty do silników asynchronicznych
Softstarty (tyrystorowe softstarty) to najbardziej zaawansowane technicznie urządzenia elektroniczne służące do łagodnego rozruchu/zatrzymywania silników elektrycznych. Zasada działania polega na kontrolowaniu napięcia wejściowego. Głównym zadaniem jest sterowanie prądem rozruchowym i momentem obrotowym jednak nowoczesne schematy softstartów posiadają wiele funkcji interfejsu, a także zapewniają kompleksową ochronę silnika.
Główne funkcje SCP:
Możliwość płynnej i bezstopniowej zmiany napięcia i prądu;
Możliwość kontrolowania prądu i momentu obrotowego poprzez tworzenie prostych programów;
Miękkie zatrzymanie z miękkim hamowaniem w tych systemach, w których może to być wymagane (przenośniki, pompy itp.);
Zapewnienie częstych uruchomień i zatrzymań bez zmiany charakterystyki systemu;
Optymalizacja przepływów pracy nawet w systemach o różnym obciążeniu.
Korzystanie z SCP pozwala na:
Wyeliminuj prądy uderzeniowe w sieci zasilającej i PIEKŁO podczas jego uruchamiania;
zmniejszyć prądy rozruchowe w AD;
wyeliminować skutki wstrząsów mechanicznych zarówno w IM, jak i mechanizmie napędowym;
zmniejszyć wpływ termiczny na ciśnienie krwi;
usunąć przepięcie podczas zatrzymywania ciśnienia krwi;
skrócić czas rozwiązywania problemów;
zwiększenie niezawodności działania i żywotności IM.
Softstarter to tyrystorowy regulator napięcia (TRN)
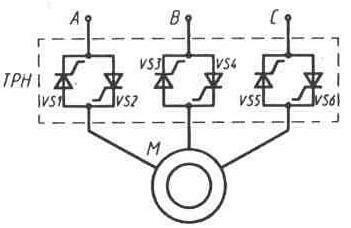
W regulatorze napięcia do każdego przewodu fazowego podłączone są antyrównolegle dwa tyrystory, z których jeden pracuje warunkowo w dodatnim półokresie napięcia sieciowego, a drugi w ujemnym półokresie. Regulacja napięcia na wyjściu regulatora odbywa się poprzez zmianę czasu włączenia każdego tyrystora w stosunku do momentu, w którym prąd musi przejść z jednego z trzech tyrystorów do drugiego (punkt bazowy), poprzez przyłożenie impulsu sterującego do tyrystora, który umożliwia zmianę czasu przepływu prądu przez tyrystor w sieci półcyklu napięcia i napięcia na jego wyjściu, dostarczanego do obciążenia, w tym przypadku do silnika. To napięcie nie jest sinusoidalne i można je przedstawić jako średnie napięcie, które można zmienić, zmieniając czas trwania tyrystora podczas pół cyklu. Czas włączenia tyrystora względem punktu bazowego jest wyrażony w stopniach i nazywany jest kątem kontrolnym. Zmieniając kąt regulacji tyrystorów można uzyskać napięcie niezbędne do płynnego rozruchu silnika.
Pod koniec procesu rozruchu tyrystory są przełączane w tryb pracy ciągłej lub mogą być zbocznikowane przez specjalny stycznik. Zastosowanie stycznika obejściowego pozwala zwiększyć sprawność urządzenia, wydłużyć żywotność tyrystorów oraz wyeliminować wpływ elementów półprzewodnikowych na sieć.
FUNKCJE OCHRONNE
Oprócz funkcji sterowania trybami uruchamiania i zatrzymywania, konwertery tyrystorowe (TCD) są wyposażone w funkcje ochrony IM i ochrony TCR przed trybami awaryjnymi. Standardowe funkcje obejmują:
zabezpieczenie przed zwarciem na wyjściu TPU;
zabezpieczenie przed zakleszczeniem wału silnika podczas rozruchu;
zabezpieczenie przed przeciążeniem prądowym w trybie pracy;
zabezpieczenie przed niedopuszczalnym spadkiem napięcia na wejściu TPU;
zabezpieczenie przed niedopuszczalnym wzrostem napięcia na wejściu TPU;
zabezpieczenie przed zanikiem faz;
zabezpieczenie przed nie załączeniem stycznika obejściowego (jeżeli występuje);
zabezpieczenie przed asymetrią napięcia wejściowego;
zabezpieczenie przed odwrotną kolejnością faz na wejściu;
zabezpieczenie termiczne silnika;
ochrona przed awarią tyrystora mocy;
ochrona w przypadku utraty sterowalności tyrystora.
Zabezpieczenie termiczne silnika wymaga czujnika temperatury wbudowanego w uzwojenie silnika, a system sterowania zapewnia jedynie obecność odpowiedniego układu wejściowego i przetwarzającego. W przypadku braku takiego czujnika przeprowadzana jest tak zwana pośrednia ochrona termiczna, która opiera się na jednym lub innym modelu termicznym silnika, który producent umieszcza w oprogramowaniu mikrokontrolera.
Oprócz rozważanych funkcji niektórzy producenci uwzględniają czujniki rezystancji izolacji w TPU oraz możliwość suszenia uzwojenia prądem stałym lub przemiennym.
Układ sterowania
Część interfejsowa systemu sterowania składa się z reguły z dwóch części: interfejsu operatora i interfejsu sprzętowego.
Interfejs operatora realizowany jest zwykle w oparciu o wyświetlacz ciekłokrystaliczny (LCD) oraz klawiaturę umieszczoną na przednim panelu urządzenia. Wyświetlacz LCD i klawiatura służą do programowania urządzenia, a na wyświetlaczu LCD wyświetlane są informacje o trybach pracy urządzenia. Wielu producentów tanich urządzeń o małej mocy wdraża interfejs operatora oparty na sygnalizacji LED i mikroprzełącznikach (zworki nastawne).
Interfejs sprzętowy zakłada rozwinięty system wprowadzania sygnałów sterujących i wyprowadzania sygnałów o stanie urządzenia. W ten sposób polecenia start/stop mogą być odbierane w postaci poziomów napięcia, zunifikowanych sygnałów prądowych lub sygnałów bezprądowych. Najnowsze modele urządzeń zawierają szeregowe kanały komunikacji oparte na magistralach RS-232, RS-432, CAN, za pośrednictwem których można realizować zarówno programowanie urządzenia, jak i ustawianie komend start/stop oraz odczytywanie informacji o trybie pracy. Całkowita liczba sygnałów wejściowych i wyjściowych może osiągnąć 15-20 kanałów.
Producenci
Obecnie TPU produkowane są przez takich światowych producentów jak ABB, Siemens, Emotron AB, Softtronic, Telemecanique, Ansaldo i wielu innych. Rosyjskie firmy opanowały również produkcję TPU. Większość firm produkuje TPU w postaci monobloku, w którym mieści się zasilacz, układ sterowania i elementy pomocnicze. Należy zauważyć, że większość urządzeń zagranicznych nie zawiera stycznika obejściowego, a system sterowania zapewnia jedynie elementy sterujące dla stycznika zewnętrznego.
Jako przykład krajowe TPU TPU4K może być napędzany mocą 55-160 kW. Jest zbudowany według klasycznego schematu, ma wbudowany stycznik obejściowy i wykorzystuje mikrokontroler Atmel jako rdzeń systemu sterowania. Interfejs operatora jest połączony, w tym wyświetlacz LCD, klawiatura podłączona na czas wprowadzania parametrów oraz szereg potencjometrów, które ustawiają aktualne ustawienia dla różnych trybów pracy. TPU ma następujące funkcje ochronne: przed stałym zwarciem na wyjściu TPU; od zakleszczenia wału silnika podczas rozruchu; przed przeciążeniem prądowym w trybie pracy; od awarii fazy; od niewłączenia stycznika obejściowego; zabezpieczenie termiczne silnika.
Po uruchomieniu jakiejkolwiek ochrony, TPU wypracowuje procedurę zatrzymania silnika zgodnie z algorytmem zoptymalizowanym dla konkretnego typu napędu. TPU jest niezmiennicze względem kolejności faz na wejściu, dzięki czemu nie wymaga ochrony przed nieprawidłowym fazowaniem sieci zasilającej. Spośród funkcji serwisowych należy zwrócić uwagę na wyjście sygnalizujące bezproblemowe zakończenie procesu rozruchu.
Szeroka gama urządzeń rozruchowych różnych producentów, o w przybliżeniu tych samych parametrach technicznych, sprawia, że zwracasz uwagę na cechy kosztowe, operacyjne i „użytkownika”.
Warto zauważyć, że produkty krajowych producentów są znacznie tańsze od zagranicznych. Dodatkowo niektórzy krajowi producenci, w odróżnieniu od zagranicznych, wliczają w cenę urządzenia koszty uruchomienia, dostosowania produktu do konkretnego napędu i optymalizacji jego właściwości w odniesieniu do konkretnego mechanizmu. Obecność mikrokontrolera pozwala poszczególnym krajowym producentom na szybkie dostosowanie algorytmów i parametrów do wymagań konkretnego klienta i konkretnego typu napędu, podczas gdy przedstawiciele firm zachodnich nie świadczą takich usług.
Przykłady SCP:
1) Softstarter SIRIUS 3RW40 ze zintegrowanymi funkcjami:
Zabezpieczenie silnika półprzewodnikowego i własne zabezpieczenie przeciążeniowe urządzenia
Regulowane ograniczenie prądu do łagodnego rozruchu i zatrzymania trójfazowych silników asynchronicznych
Zakres mocy znamionowej od 75 do 250 kW (przy 400 V)
Obszary zastosowania:
Wentylatory, pompy, maszyny budowlane, prasy, schody ruchome, systemy klimatyzacyjne, systemy transportowe, linie montażowe, sprężarki i 
chłodnice, siłowniki.
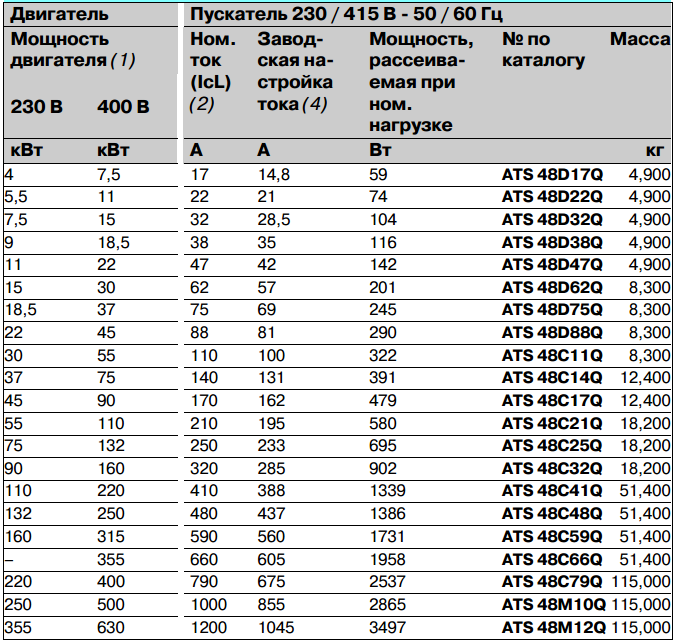
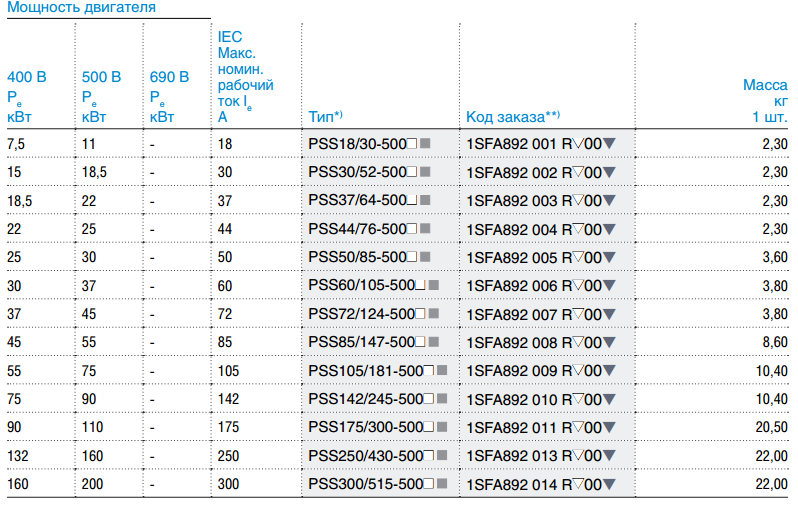
2) Softstarty PSS to seria uniwersalna. Firma ABB

3) Softstarty i hamulce Altistart 48. Schneider Electric