Rodzaje jednofazowych silników elektrycznych. Silniki asynchroniczne jednofazowe. Urządzenie i zasada działania
3-7. URZĄDZENIE ASYCHRONICZNYCH JEDNOFAZOWYCH SILNIKÓW ELEKTRYCZNYCH
Na ryc. 3-16 przedstawia urządzenie asynchronicznego jednofazowego silnika elektrycznego typu AOLB z wbudowanym rezystorem rozruchowym. Stojan silnika elektrycznego składa się z wytłoczonych blach ze stali elektrotechnicznej 15, wciśniętych i wlanych w aluminiową osłonę (obudowa stojana) z podwójnymi ściankami 13. Pomiędzy ściankami uformowane są kanały do chłodzenia powietrzem powierzchni stojana. Na ostrzenie obudowy stojana nałożone są dwie pokrywy 2 i 17 odlane ze stopu aluminium.
Na przednią pokrywę 17 nakładana jest wytłoczona nasadka 18 z otworami na końcu. Przez te otwory, gdy wirnik się obraca, wentylator 19, zamontowany na końcu wału wirnika, pobiera powietrze. Wentylator odlany jest ze stopu aluminium i mocowany do wału za pomocą śruby.
W blachach stojana wytłoczone są 24 rowki w kształcie gruszki. Spośród nich 16 szczelin jest zajętych przez druty uzwojenia roboczego, a 8 szczelin jest zajętych przez druty uzwojenia początkowego. Końce wyjściowe uzwojeń roboczych i rozruchowych są wyprowadzone do śrub stykowych 4 znajdujących się w skrzynce zaciskowej 11. Rdzeń wirnika jest montowany z blach 12 stali elektrotechnicznej i dociskany do pofałdowanej powierzchni środkowej części wału 1. Aluminiowe uzwojenie 14 z pierścieniami zamykającymi i łopatkami wentylatora wlewa się w rowki wirnika. Zadaniem wentylatora jest wyrzucanie ogrzanego powietrza w kierunku chłodzonych ścianek zewnętrznych obudowy.

Na wirniku zamontowany jest wyłącznik odśrodkowy uzwojenia początkowego. Składa się z dwóch dźwigni 7 z przeciwwagami 9, osadzonych na osiach 8, które są wciśnięte w cztery łopatki wentylatora. Dźwignie są dociskane kołkami 6 na plastikowej tulei 5, która swobodnie osadza się na wale. Podczas przyspieszania wirnika, gdy częstotliwość jego obrotu zbliża się do wartości nominalnej, przeciwwagi rozchodzą się pod działaniem siły odśrodkowej, obracając dźwignie wokół osi.
W tym przypadku tuleja 5 przesuwa się w prawo, ściskając sprężynę 10 i zwalnia styk sprężynowy 4, który zamyka początkowy obwód uzwojenia. Ten styk, gdy wirnik jest nieruchomy, jest zamknięty przez koniec tulei ze stałym stykiem 3.
Styki ruchome i nieruchome są zamontowane na płycie izolacyjnej do tylnej pokrywy silnika elektrycznego 2. Na niej zamocowany jest przekaźnik termiczny, który odłącza silnik elektryczny od sieci, gdy się przegrzewa. Do montażu silnika służy stojak 16 z czterema kołkami.
Schemat włączenia silnika elektrycznego pokazano na ryc. 3-17.
Napięcie sieciowe podawane jest na zaciski C 1 i C 2. Z tych zacisków napięcie jest dostarczane do uzwojenia roboczego przez styki przekaźnik termiczny RT, składający się z uzwojenia, płytki bimetalicznej i styków. Gdy silnik elektryczny nagrzewa się powyżej dopuszczalnej wartości, płyta wygina się i otwiera styki. W przypadku zwarcia przez uzwojenie przekaźnika termicznego przepłynie duży prąd, płytka szybko się nagrzeje i otworzy styki. W takim przypadku uzwojenia robocze C i początkowe P zostaną pozbawione napięcia, ponieważ oba są zasilane przez przekaźnik termiczny. W ten sposób przekaźnik termiczny chroni silnik zarówno przed przeciążeniem, jak i zwarciem.
Uzwojenie początkowe jest zasilane z zacisków C 1 i C 2 przez zworkę C 2 -P 1, styki przełącznika odśrodkowego VTS, zworkę VTS-RT, styki przekaźnika termicznego RT. Podczas uruchamiania silnika elektrycznego, gdy wirnik osiągnie prędkość 70-80% nominalnej, styki przełącznika odśrodkowego otworzą się, a uzwojenie rozruchowe zostanie odłączone od sieci. Po włączeniu silnika elektrycznego, gdy prędkość wirnika spada, styki wyłącznika odśrodkowego ponownie się zamkną i uzwojenie rozruchowe będzie przygotowane do następnego rozruchu.
Na ryc. 3-18 przedstawia budowę silnika asynchronicznego typu ABE.Silniki te są podłączone do sieci z podłączonym na stałe uzwojeniem pomocniczym, w obwodzie którego kondensator jest połączony szeregowo (rys. 3-9). nie mają sztywnej obudowy i dlatego nazywane są wbudowanymi. Za pomocą mechanizmu napędowego silniki elektryczne są mocowane za pomocą kołnierza lub wspornika.
Korpus silnika elektrycznego to pakiet rdzenia stojana 1, zmontowany z blach elektrotechnicznych o grubości 0,5 mm. Opakowanie jest prasowane i wypełniane stopem aluminium pod ciśnieniem. Na końcach stojana znajdują się pierścienie dociskowe 5 i dokręcające je cztery aluminiowe pręty. Cewki 6 uzwojenia roboczego i pomocniczego są włożone w szczeliny stojana. Tarcze łożyskowe 4 są centrowane na pierścieniach dociskowych 5 i 7. Przez gumową tuleję 9 w osłonie łożyska wyprowadzane są końce uzwojeń 8, aby połączyć je z siecią. Tarcze łożysk dokręcane są czterema kołkami.
Wirnik silnika jest zmontowany z blachy elektrotechnicznej i wypełniony aluminium 2. Wraz z uzwojeniem wirnika odlane są skrzydełka wentylatora w celu chłodzenia silnika. Wirnik obraca się w dwóch łożyskach kulkowych 3.
Silniki elektryczne mają oznaczenia literowe i numeryczne, np. silnik elektryczny ABE 041-2 oznacza: A - asynchroniczny, B - wbudowany, E - jednofazowy,
4 to numer rozmiaru, 1 to numer seryjny długości rdzenia stojana, a cyfra 2 przez myślnik to liczba biegunów.
3-8. SYNCHRONICZNE JEDNOFAZOWE SILNIKI ELEKTRYCZNE
W niektórych przypadkach wymagane są silniki elektryczne, których prędkość musi być ściśle stała niezależnie od obciążenia. Jako takie stosuje się synchroniczne silniki elektryczne, w których prędkość wirnika jest zawsze równa prędkości pole magnetyczne i jest określony przez (3-2). Istnieje wiele rodzajów silników synchronicznych, zarówno trójfazowych, jak i jednofazowych. Rozważane są tutaj tylko dwa najprostsze typy jednofazowych synchronicznych silników elektrycznych: reaktywne i reaktywne kondensatorowe.

Na ryc. 3-19 przedstawia schemat strukturalny najprostszego jednofazowego silnika reluktancyjnego, znanego w stanie techniki jako koło La Coura. Stojan 1 i wirnik 2 są zmontowane z wytłoczonych blach ze stali elektrotechnicznej. Na stojanie nawinięta jest cewka, zasilana z jednofazowej sieci prądu przemiennego, która wytwarza pulsujące pole magnetyczne. Silnik odrzutowy ma swoją nazwę, ponieważ wirnik obraca się w wyniku reakcji dwóch sił przyciągania magnetycznego.
Przy pulsującym polu silnik nie ma momentu rozruchowego i musi być obracany ręcznie. Siły magnetyczne działające przez cały czas na zęby wirnika mają tendencję do dociskania go do biegunów stojana, ponieważ w tej pozycji opór na strumień magnetyczny będzie minimalny. Jednak wirnik bezwładności mija tę pozycję w czasie, gdy pole pulsujące maleje. Przy następnym wzroście pola magnetycznego siły magnetyczne działają na kolejny ząb wirnika, a jego obrót będzie kontynuowany. Dla stabilności kursu wirnik reaktywnego silnika elektrycznego musi mieć dużą bezwładność.
Reaktywne silniki elektryczne pracują stabilnie tylko przy niskich prędkościach obrotowych rzędu 100–200 obr/min. Ich moc zwykle nie przekracza 10-15 watów. Prędkość wirnika jest określona przez częstotliwość sieci f i liczbę zębów wirnika Z. Ponieważ wirnik obraca się o 1/Z obrotu w jednym półcyklu zmiany strumienia magnetycznego, obraca się on o 60 2 obroty f/Z w 1 min, zawierający 60 2 f półcykli . Przy częstotliwości prądu przemiennego 50 Hz prędkość wirnika wynosi:
![]()
Aby zwiększyć moment obrotowy, zwiększ liczbę zębów na stojanie. Największy efekt można osiągnąć wykonując tyle zębów na stojanie, co na wirniku. W takim przypadku przyciąganie magnetyczne będzie działać jednocześnie nie na parę zębów, ale na wszystkie zęby wirnika, a moment obrotowy znacznie wzrośnie. W takich silnikach elektrycznych uzwojenie stojana składa się z małych cewek nawiniętych na obrzeże stojana w szczelinach między zębami. Starsze typy odtwarzaczy elektrycznych wykorzystywały taki silnik elektryczny z 77 zębami na stojanie i na wirniku, który zapewniał prędkość obrotową tarczy 78 obr/min. Wirnik był jednoczęściowy z tarczą, na której umieszczono płytę. Aby uruchomić silnik elektryczny, należało popchnąć tarczę palcem.
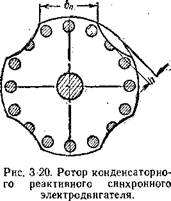
Stojan synchronicznego silnika reluktancyjnego kondensatora nie różni się od stojana silnika indukcyjnego kondensatora. Wirnik silnika elektrycznego można wykonać z wirnika asynchronicznego silnika elektrycznego, frezując w nim rowki zgodnie z liczbą biegunów (ryc. 3-20). W tym przypadku pręty klatki wiewiórki są częściowo odcięte. W fabrycznej produkcji takich silników elektrycznych z blachami wirnika wytłoczonymi półkami biegunowymi część prętów klatkowych pełni rolę uzwojenia rozruchowego. Wirnik zaczyna się obracać w taki sam sposób jak wirnik asynchronicznego silnika elektrycznego, następnie jest wciągany w synchronizację z polem magnetycznym, a następnie obraca się z częstotliwością synchroniczną.
Jakość pracy silnik kondensatorowy silnie zależy od trybu, w którym silnik elektryczny ma okrągłe pole wirujące. Eliptyczność pola w trybie synchronicznym prowadzi do wzrostu hałasu, wibracji i naruszenia jednorodności obrotu. Jeśli kołowe pole wirujące występuje w trybie asynchronicznym, silnik ma dobry moment rozruchowy, ale małe momenty wejściowe i wyjściowe. Gdy pole kołowe zostanie przesunięte w kierunku wyższych częstotliwości, moment rozruchowy maleje, a momenty wejścia i wyjścia z synchronizmu wzrastają. Największe momenty wejścia i wyjścia z synchronizmu uzyskuje się, gdy kołowe pole wirujące odbywa się w trybie synchronicznym. Jednak w tym przypadku moment rozruchowy jest znacznie zmniejszony. Aby go zwiększyć, zwykle nieco zwiększa się rezystancję czynną zwartego uzwojenia wirnika.
Wadą niektórych typów silników reluktancyjnych kondensatorów jest sklejanie się wirnika, co oznacza, że podczas rozruchu wirnik nie obraca się, ale zatrzymuje się w dowolnej pozycji.
Przyklejanie się wirnika występuje zwykle w silnikach o niefortunnym stosunku wymiarów wnęk do występów biegunów. Największy bierny moment obrotowy przy małej mocy pobieranej przez silnik elektryczny uzyskuje się, gdy stosunek łuku biegunowego bp do podziału biegunowego t wynosi około 0,5-0,6, a głębokość wnęk h jest 9-10 razy większa od powietrza szczelina między występami bieguna a stojanem.
Pozytywną cechą silników reluktancyjnych kondensatorów jest wysoki współczynnik mocy, który jest znacznie wyższy niż w przypadku silników trójfazowych i czasami osiąga 0,9-0,95. Dzieje się tak, ponieważ indukcyjność silnika kondensatora jest w dużej mierze kompensowana przez pojemność kondensatora.
Najczęściej spotykane są silniki synchroniczne reluktancyjne silniki synchroniczne ze względu na prostotę konstrukcji, niski koszt i brak styków przesuwnych. Znalazły zastosowanie w obwodach komunikacji synchronicznej, filmie dźwiękowym, rejestracji dźwięku i instalacjach telewizyjnych.
3-9. ZASTOSOWANIE TRÓJFAZOWYCH ASYCHRONICZNYCH SILNIKÓW ELEKTRYCZNYCH JAKO JEDNOFAZ
W praktyce zdarzają się przypadki, w których konieczne jest podłączenie trójfazowego silnika elektrycznego do sieć jednofazowa. Wcześniej uważano, że wymaga to przewinięcia stojana silnika elektrycznego. Obecnie opracowano i przetestowano w praktyce wiele schematów podłączania trójfazowych silników elektrycznych do sieci jednofazowej bez żadnych zmian w uzwojeniach stojana.
Kondensatory są używane jako elementy startowe.
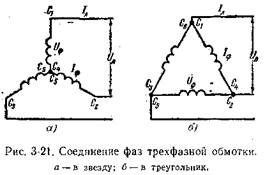
Wnioski z uzwojenia stojana trójfazowego silnika elektrycznego mają następujące oznaczenia: C1 - początek pierwszej fazy; C2 – początek drugiej fazy; NW – początek fazy trzeciej; C4 - koniec pierwszej fazy; C5 - koniec drugiej fazy; C6 – koniec trzeciej fazy. Oznaczenia te są wytłoczone na metalowych znacznikach noszonych na przewodach przewodowych uzwojenia.
Uzwojenie trójfazowego silnika elektrycznego można połączyć w gwiazdę (ryc. 3-21, a) lub trójkąt (ryc. 3-21, b). Po podłączeniu do gwiazdy początki lub końce wszystkich trzech faz są połączone z jednym punktem, a pozostałe trzy wyjścia są podłączone do sieci trójfazowej. Łącząc się z trójkątem, koniec pierwszej fazy łączy się z początkiem drugiej, koniec drugiej z początkiem trzeciej, a koniec trzeciej z początkiem pierwszej. Przewody są pobierane z punktów połączeń, aby podłączyć silnik elektryczny do sieć trójfazowa.
W układzie trójfazowym rozróżnia się napięcia i prądy fazowe i liniowe. Po połączeniu z gwiazdą zachodzą między nimi następujące relacje:
po połączeniu w trójkącie
Większość trójfazowych silników elektrycznych jest produkowanych dla dwóch napięć liniowych, na przykład 127/220 V lub 220/380 V. Przy niższym napięciu sieci uzwojenie jest połączone w trójkąt, a przy wyższym w gwiazdę. W przypadku takich silników elektrycznych wszystkie sześć przewodów wyjściowych uzwojenia jest wyprowadzonych na płytkę: zaciski.
Istnieją jednak silniki elektryczne na jedno napięcie sieciowe, w których uzwojenie jest połączone w gwiazdę lub trójkąt wewnątrz silnika elektrycznego, a do listwy zaciskowej wyprowadzone są tylko trzy przewody. Oczywiście w tym przypadku można by zdemontować silnik elektryczny, rozłączyć połączenia międzyfazowe i wyciągnąć trzy dodatkowe wnioski. Nie można tego jednak zrobić, korzystając z jednego ze schematów podłączenia silnika elektrycznego do sieci jednofazowej, które podano poniżej.
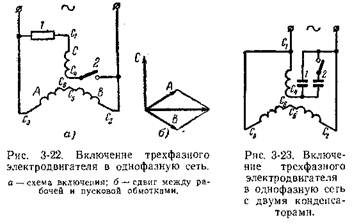
Schemat ideowy włączenia trójfazowego silnika elektrycznego z sześcioma wyjściami do sieci jednofazowej pokazano na ryc. 3-22, za. W tym celu dwie fazy są połączone szeregowo i połączone z siecią jednofazową, a trzecia faza jest z nimi połączona równolegle, w tym element rozruchowy 1 z przełącznikiem 2. Aktywna rezystancja lub kondensator może służyć jako element początkowy. W takim przypadku uzwojenie robocze zajmie 2/3 szczelin stojana, a uzwojenie początkowe 1/3. W ten sposób uzwojenie trójfazowe zapewnia wymagany stosunek szczelin między uzwojeniem roboczym i początkowym. Przy takim połączeniu kąt między uzwojeniem roboczym a początkowym wynosi 90 ° el. (ryc. 3-22, b).
Łącząc dwie fazy szeregowo, należy upewnić się, że są one połączone zgodnie z, a nie licznikiem, gdy n. Z. połączone fazy są odejmowane. Jak widać na schemacie na ryc. 3-22, a, końce drugiej i trzeciej fazy C5 i C6 są połączone ze wspólnym punktem.
Jako kondensator można zastosować trójfazowy silnik elektryczny zgodnie ze schematem na ryc. 3-23 z jednym kondensatorem roboczym 1 lub z kondensatorem roboczym 1 i rozruchowymi 2 kondensatorami. Przy takim schemacie przełączania pojemność kondensatora roboczego, μF, jest określona wzorem:
Gdzie ja - prąd znamionowy silnik elektryczny, A; U to napięcie sieciowe, V.
Trójfazowy silnik elektryczny z trzema zaciskami i uzwojeniem stojana połączonym z gwiazdą jest podłączony do sieci jednofazowej zgodnie ze schematem na ryc. 3-24. W tym przypadku pojemność kondensatora roboczego jest określona wzorem
Napięcie kondensatora U 1 = 1,3 U.
Trójfazowy silnik elektryczny z trzema zaciskami i uzwojeniem stojana połączonym w trójkąt jest podłączony do sieci jednofazowej zgodnie ze schematem na ryc. 3-25. Pojemność kondensatora roboczego określa wzór
Napięcie kondensatora U=1,15 V.
We wszystkich trzech przypadkach pojemność kondensatory rozruchowe można w przybliżeniu określić z zależności
![]()
Przy wyborze obwodu przełączającego należy kierować się napięciem, dla którego projektowany jest trójfazowy silnik elektryczny oraz napięciem sieci jednofazowej. W tym przypadku napięcie fazowe trójfazowego

Przykład. Do sieci jednofazowej o napięciu 220 V należy podłączyć trójfazowy silnik elektryczny o mocy 250 W, napięciu 127/220 V o prądzie znamionowym 2/1,15 A.
Korzystając ze schematu z ryc. 3-24 pojemność kondensatora roboczego:
![]()
napięcie na kondensatorze U 1 \u003d 1,3 220 \u003d 286 V.
Kondensator rozruchowy
Przy zastosowaniu trójfazowego silnika elektrycznego jako silnika jednofazowego jego moc zmniejsza się do 50%, jako kondensatora jednofazowego - do 70% mocy znamionowej trójfazowego silnika elektrycznego.
N.V. Winogradow, Yu.N. Winogradów
Jak samemu obliczyć i wykonać silnik elektryczny
Moskwa 1974
Łatwość konwersji napięcia AC sprawiła, że jest to najczęściej stosowane w zasilaczach. W dziedzinie projektowania silników elektrycznych odkryto kolejną zaletę prądu przemiennego: możliwość wytworzenia wirującego pola magnetycznego bez dodatkowych transformacji lub z minimalną ich liczbą.
Dlatego nawet pomimo pewnych strat spowodowanych bierną (indukcyjną) rezystancją uzwojeń, łatwość tworzenia silników prądu przemiennego przyczyniła się do zwycięstwa nad zasilaniem stałym na początku XX wieku.
Zasadniczo silniki prądu przemiennego można podzielić na dwie grupy:
Asynchroniczny
W nich obrót wirnika różni się prędkością od obrotu pola magnetycznego, dzięki czemu mogą pracować z różnymi prędkościami. Ten typ silnika prądu przemiennego jest najczęstszy w naszych czasach. Synchroniczny
Silniki te mają sztywne połączenie między prędkością wirnika a prędkością obrotową pola magnetycznego. Są trudniejsze do wykonania i mniej elastyczne w użytkowaniu (zmiana prędkości przy stałej częstotliwości sieci zasilającej jest możliwa tylko poprzez zmianę liczby biegunów stojana).
Stosowane są tylko przy dużych mocach rzędu kilkuset kilowatów, gdzie ich wyższa sprawność w porównaniu z asynchronicznymi silnikami elektrycznymi znacznie zmniejsza straty ciepła.
ASYCHRONICZNY SILNIK ELEKTRYCZNY AC
Najpopularniejszym typem silnika asynchronicznego jest silnik elektryczny z wirnik klatkowy typu „klatka wiewiórkowa”, w której w nachylonych rowkach wirnika układany jest zestaw prętów przewodzących, połączonych na końcach pierścieniami.
Historia tego typu silników elektrycznych sięga ponad stu lat, kiedy zauważono, że obiekt przewodzący umieszczony w szczelinie rdzenia elektromagnesu prądu przemiennego ma tendencję do wyłamywania się z niego z powodu pojawienia się indukcyjnego pola elektromagnetycznego w nim z przeciwnym wektorem.
Tym samym silnik indukcyjny z wirnikiem klatkowym nie posiada żadnych mechanicznych węzłów stykowych poza łożyskami podtrzymującymi wirnik, co zapewnia silnikom tego typu nie tylko niską cenę, ale także najwyższą trwałość. Dzięki temu silniki elektryczne tego typu stały się najbardziej rozpowszechnione we współczesnym przemyśle.
Mają jednak również pewne wady, które należy wziąć pod uwagę przy projektowaniu asynchronicznych silników elektrycznych tego typu:
Wysoki prąd rozruchowy- ponieważ w chwili podłączenia do sieci asynchronicznego bezszczotkowego silnika elektrycznego, na rezystancję bierną uzwojenia stojana nie ma jeszcze wpływu pole magnetyczne wytworzone przez wirnik, występuje silny skok prądu, kilkukrotnie większy niż pobór prądu znamionowego .
Ta cecha działania silników tego typu musi być uwzględniona we wszystkich projektowanych układach zasilania, aby uniknąć przeciążeń, zwłaszcza przy podłączaniu asynchronicznych silników elektrycznych do ruchomych generatorów o ograniczonej mocy.
Niski moment rozruchowy- silniki elektryczne ze zwartym uzwojeniem mają wyraźną zależność momentu obrotowego od prędkości, więc ich włączenie pod obciążeniem jest wysoce niepożądane: czas osiągnięcia trybu nominalnego i prądy rozruchowe znacznie się zwiększają, uzwojenie stojana jest przeciążone.
Na przykład, co się dzieje po włączeniu głębokie pompy- w obwodach elektrycznych ich zasilania należy wziąć pod uwagę pięciosiedmiokrotny margines prądu.
Brak możliwości bezpośredniego rozruchu w jednofazowych obwodach prądowych- aby wirnik zaczął się obracać, konieczne jest pchnięcie rozruchowe lub wprowadzenie dodatkowych uzwojeń fazowych przesuniętych względem siebie.
Aby uruchomić asynchroniczny silnik prądu przemiennego w sieci jednofazowej, stosuje się albo ręcznie przełączane uzwojenie rozruchowe, które jest wyłączane po obrocie wirnika, albo drugie uzwojenie połączone przez element przesuwający fazę (najczęściej kondensator wymagana pojemność).
Niemożność uzyskania dużej prędkości- choć obrót wirnika nie jest zsynchronizowany z częstotliwością wirowania pola magnetycznego stojana, to nie może go prowadzić, dlatego w sieci 50 Hz maksymalna prędkość asynchronicznego silnika elektrycznego z wirnikiem klatkowym nie wynosi ponad 3000 obr./min.
Zwiększenie prędkości silnika indukcyjnego wymaga zastosowania przemiennika częstotliwości (falownika), co czyni taki układ droższym niż silnik kolektorowy. Ponadto wraz ze wzrostem częstotliwości rosną straty reaktywne.
Trudność w zorganizowaniu rewersu- wymaga to całkowitego zatrzymania silnika i ponownego przełączenia faz, w wersji jednofazowej - przesunięcia fazy w uzwojeniu rozruchowym lub drugiej fazie.
Najwygodniej jest stosować asynchroniczny silnik elektryczny w przemysłowej sieci trójfazowej, ponieważ tworzenie wirującego pola magnetycznego odbywa się przez same uzwojenia fazowe bez dodatkowych urządzeń.
W rzeczywistości obwód składający się z generatora trójfazowego i silnika elektrycznego można uznać za przykład transmisji elektrycznej: napęd generatora wytwarza w nim wirujące pole magnetyczne, które przekształca się w drgania prąd elektryczny, który z kolei wzbudza rotację pola magnetycznego w silniku elektrycznym.
Dodatkowo jest z zasilaniem trójfazowym asynchroniczne silniki elektryczne, mają najwyższą sprawność, ponieważ w sieci jednofazowej pole magnetyczne wytworzone przez stojan można zasadniczo rozłożyć na dwa przeciwfazowe, co zwiększa niepotrzebne straty z powodu przesycenia rdzenia. Dlatego mocne jednofazowe silniki elektryczne są zwykle wykonywane zgodnie z obwodem kolektora.
KOLEKTOR SILNIKA ELEKTRYCZNEGO AC
W tego typu silnikach elektrycznych pole magnetyczne wirnika wytwarzane jest przez uzwojenia fazowe połączone z kolektorem. W rzeczywistości silnik komutatorowy prądu przemiennego różni się od silnika prąd stały tylko przez fakt, że reaktancja uzwojeń jest uwzględniona w jego obliczeniach.
W niektórych przypadkach tworzone są nawet uniwersalne silniki kolektorowe, w których uzwojenie stojana ma odczep z niekompletnej części do włączenia do sieci prądu przemiennego, a źródło prądu stałego można podłączyć do pełnej długości uzwojenia.
Zalety tego typu silnika są oczywiste:
Możliwość pracy przy dużych prędkościach pozwala tworzyć kolektorowe silniki elektryczne o prędkości obrotowej dochodzącej do kilkudziesięciu tysięcy obrotów na minutę, znanej wszystkim z wiertarek elektrycznych.
Nie ma potrzeby stosowania dodatkowych wyzwalaczy w przeciwieństwie do silników klatkowych.
Wysoki moment rozruchowy, co przyspiesza wyjście do trybu pracy, w tym pod obciążeniem. Ponadto moment obrotowy silnika kolektora jest odwrotnie proporcjonalny do prędkości i wraz ze wzrostem obciążenia zapobiega spadkowi prędkości.
Łatwość kontroli obrotów- ponieważ zależą od napięcia zasilania, wystarczy mieć prosty triakowy regulator napięcia, aby regulować prędkość w najszerszych granicach. W przypadku awarii regulatora silnik kolektora można podłączyć bezpośrednio do sieci.
Mniejsza bezwładność wirnika- może być znacznie bardziej kompaktowy niż w przypadku obwodu klatkowego, dzięki czemu sam silnik kolektora staje się zauważalnie mniejszy.
Również silnik kolektora można po prostu odwrócić, co jest szczególnie ważne przy tworzeniu różnego rodzaju elektronarzędzi i wielu obrabiarek.
Z tych powodów silniki kolektorowe są szeroko stosowane we wszystkich odbiornikach jednofazowych, gdzie konieczna jest elastyczna regulacja prędkości: w ręcznych elektronarzędziach, odkurzaczach, Urządzenia kuchenne i tak dalej. Jednak liczba cechy konstrukcyjne określa specyfikę działania silnika elektrycznego kolektora:
Silniki kolektorów wymagają regularnej wymiany szczotek, które z czasem się zużywają. Sam kolektor się zużywa, a silnik z wirnikiem klatkowym, jak już wspomniano powyżej, poddawany rzadkiej wymianie łożysk, jest prawie wieczny.
Nieuniknione iskrzenie między kolektorem a szczotkami (przyczyna znanego zapachu ozonu podczas pracy silnika kolektora) nie tylko dodatkowo zmniejsza zasoby, ale także wymaga zwiększonych środków bezpieczeństwa podczas pracy ze względu na prawdopodobieństwo zapłonu gazów palnych lub pył.
© 2012-2017 Wszelkie prawa zastrzeżone.
Wszystkie materiały prezentowane na tej stronie służą wyłącznie celom informacyjnym i nie mogą być wykorzystywane jako wytyczne i dokumenty normatywne.
Obszary zastosowania. Silniki asynchroniczne małej mocy (15 - 600 W) są stosowane w urządzenia automatyczne oraz sprzęt AGD do napędzania wentylatorów, pomp i innego sprzętu niewymagającego regulacji prędkości. W urządzeniach elektrycznych i urządzeniach automatycznych zwykle stosuje się mikrosilniki jednofazowe, ponieważ te urządzenia i urządzenia są z reguły zasilane z jednofazowej sieci prądu przemiennego.
Zasada działania i urządzenie silnika jednofazowego. Uzwojenie stojana silnika jednofazowego (ryc. 4.60, a) umieszczone w szczelinach zajmujących około dwie trzecie obwodu stojana, co odpowiada parze biegunów. W rezultacie
(patrz rozdz. 3) rozkład MMF i indukcji w szczelinie powietrznej jest zbliżony do sinusoidalnego. Ponieważ uzwojenie mija prąd przemienny, MDS pulsuje w czasie z częstotliwością sieci. Indukcja w dowolnym punkcie szczeliny powietrznej
Vx = V m sinωtcos (πх/τ).
Tak więc w silniku jednofazowym uzwojenie stojana wytwarza stacjonarny strumień, który zmienia się w czasie, a nie kołowy strumień wirujący, jak w silnikach trójfazowych z symetrycznym zasilaniem.
Aby uprościć analizę właściwości silnika jednofazowego, przedstawiamy (4.99) w postaci
V x \u003d 0,5 V t sin (ωt - πx / τ) + 0,5 V t sin (ωt + πx / τ),.
czyli zastępujemy stacjonarny przepływ pulsujący sumą identycznych pól kołowych wirujących w przeciwnych kierunkach i mających te same częstotliwości obrotowe: n 1wk = n 1 obr = n jeden . Ponieważ właściwości silnika indukcyjnego z kołowym polem wirującym zostały szczegółowo omówione w § 4.7 - 4.12, analizę właściwości silnika jednofazowego można sprowadzić do uwzględnienia połączonego działania każdego z pól wirujących. Innymi słowy, silnik jednofazowy można przedstawić jako dwa identyczne silniki, których wirniki są sztywno połączone (ryc. 4.60, b), o przeciwnym kierunku obrotu pól magnetycznych i wytwarzanych przez nie momentów M w M przyb. Pole, którego kierunek obrotu pokrywa się z kierunkiem obrotu wirnika, nazywa się bezpośrednim; pole kierunku odwrotnego - odwrotny lub odwrotny.
Załóżmy, że kierunek obrotu wirników pokrywa się z kierunkiem jednego z wirujących pól, np. z n itd. Wtedy ślizganie się wirnika względem przepływu F itp
s pr \u003d (n 1pr - n 2) / n 1pr \u003d (n 1 - n 2) / n 1 \u003d 1 - n 2 / n 1..
Poślizg wirnika względem przepływu Ф arr
s arr \u003d (n 1 arr + n 2) / n 1 arr \u003d (n 1 + n 2) / n 1 \u003d 1 + n 2 / n 1..
Z (4.100) i (4.101) wynika, że
s o6p \u003d 1 + p 2 / n 1 \u003d 2 - s pr..
Momenty elektromagnetyczne M w M arr, utworzone przez pola bezpośrednie i odwrotne, są skierowane do przeciwne strony i wynikowy moment silnika jednofazowego M cięcie jest równe różnicy momentów przy tej samej prędkości wirnika.
Na ryc. 4.61 pokazuje zależność M = f(s) dla silnika jednofazowego. Patrząc na rysunek, możemy wyciągnąć następujące wnioski:
a) silnik jednofazowy nie ma momentu rozruchowego; obraca się w kierunku, w którym jest napędzany siłą zewnętrzną; b) prędkość obrotowa silnika jednofazowego na biegu jałowym jest mniejsza niż silnik trójfazowy, ze względu na obecność momentu hamowania generowanego przez pole wsteczne;
c) osiągi silnika jednofazowego są gorsze niż silnika trójfazowego; ma zwiększony poślizg przy obciążeniu znamionowym, niższą wydajność, niższą zdolność przeciążania, co również wynika z obecności pola odwróconego;
d) moc silnika jednofazowego wynosi około 2/3 mocy silnika trójfazowego tej samej wielkości, ponieważ w silniku jednofazowym uzwojenie robocze zajmuje tylko 2/3 szczelin stojana. Wypełnij wszystkie gniazda stojana
ponieważ w tym przypadku współczynnik uzwojenia okazuje się niewielki, zużycie miedzi wzrasta o około 1,5 razy, podczas gdy moc wzrasta tylko o 12%.
Urządzenia startowe. Aby uzyskać początkowy moment obrotowy, silniki jednofazowe mieć uzwojenie początkowe przesunięte o 90 stopni elektrycznych względem głównego uzwojenia roboczego. Na okres rozruchu uzwojenie początkowe jest połączone z siecią za pomocą elementów przesuwających fazę - pojemności lub rezystancji czynnej. Po zakończeniu przyspieszania silnika uzwojenie początkowe zostaje wyłączone, a silnik nadal pracuje jako jednofazowy. Ponieważ uzwojenie początkowe działa tylko przez krótki czas, jest wykonane z drutu o mniejszym przekroju niż robocze i umieszczone w mniejszej liczbie rowków.
Przyjrzyjmy się bliżej procesowi rozruchu przy użyciu pojemności C jako elementu przesuwającego fazę (ryc. 4.62, a). Na uzwojeniu początkowym P Napięcie
Ú
1p = Ú
1 - Ú
C= Ú
1 +jÍ 1 P X C, czyli jest przesunięty w fazie względem napięcia sieciowego U 1 zastosowany do uzwojenia roboczego R. W konsekwencji obecne wektory w pracy I 1p i launcher I Uzwojenia 1n są przesunięte w fazie o pewien kąt. Dobierając w określony sposób pojemność kondensatora przesuwającego fazę, można uzyskać przy rozruchu tryb pracy zbliżony do symetrycznego (rys. 4.62, b), tj. uzyskać kołowe pole wirujące. Na ryc. 4.62, pokazane są zależności M = f(s) dla silnika z włączonym uzwojeniem początkowym (krzywa 1) i wyłączonym (krzywa 2). Silnik jest uruchamiany w częściach ab cechy 1; w punkcie b uzwojenie rozruchowe jest wyłączone, a w przyszłości silnik pracuje na części WSPÓŁ cechy 2.
Ponieważ włączenie drugiego uzwojenia znacznie poprawia właściwości mechaniczne silnika, w niektórych przypadkach stosuje się silniki jednofazowe, w których uzwojenia A i B
cały czas włączony (ryc. 4.63, a). Takie silniki nazywane są silnikami kondensatorowymi.
Oba uzwojenia silników kondensatorowych zajmują z reguły taką samą liczbę żłobków i mają taką samą moc. Podczas uruchamiania silnika kondensatorowego w celu zwiększenia momentu rozruchowego zaleca się zwiększenie pojemności C p + C p. Po przyspieszeniu silnika zgodnie z charakterystyką 2 (ryc. 4.63, b) i zmniejszeniu prądu, część kondensatorów Cn jest wyłączany tak, aby w trybie znamionowym (gdy prąd silnika zmniejszy się, niż przy rozruchu) zwiększyć pojemność i zapewnić pracę silnika w warunkach zbliżonych do pracy z kołowym polem wirującym. W tym przypadku silnik pracuje na charakterystyce 1.
Silnik kondensatorowy ma wysoki cos φ. Jego wadami są stosunkowo duża masa i wymiary kondensatora, a także występowanie niesinusoidalnego prądu podczas odkształcenia napięcia zasilającego, co w niektórych przypadkach prowadzi do Szkodliwe efekty na linii komunikacyjnej.
W warunkach lekkiego rozruchu (mały moment obciążenia w okresie rozruchu) stosuje się silniki z rezystancją rozruchową. R(ryc. 4.64, a). Dostępność aktywny opór w obwodzie uzwojenia początkowego zapewnia mniejsze przesunięcie fazowe φ p między napięciem a prądem w tym uzwojeniu (ryc. 4.64, b) niż przesunięcie fazowe φ p w uzwojeniu roboczym. W związku z tym prądy w pracy i uzwojenia początkowe są przesunięte w fazie o kąt φ p - φ p i tworzą asymetryczne (eliptyczne) pole wirujące, dzięki któremu powstaje moment rozruchowy. Silniki z oporem rozruchowym są niezawodne w działaniu i są produkowane masowo. Opór rozruchowy jest wbudowany w obudowę silnika i chłodzony tym samym powietrzem, które chłodzi cały silnik.
Mikrosilniki jednofazowe z ekranowanymi biegunami. W tych silnikach uzwojenie stojana podłączone do sieci jest zwykle skoncentrowane i wzmocnione na wyraźnych biegunach (ryc. 4.65, a), których arkusze są tłoczone razem ze stojanem. W każdym biegunie jedna z łap jest pokryta uzwojeniem pomocniczym, składającym się z jednego lub więcej zwartych zwojów, które osłaniają od 1/5 do 1/2 łuku biegunowego. Wirnik silnika jest konwencjonalnym typem klatkowym.
Strumień magnetyczny maszyny wytworzony przez uzwojenie stojana (strumień biegunowy) można przedstawić jako sumę dwóch składników (rys. 4.65, b) ty cewka; Ф n2 - przepływ przechodzący przez część bieguna, ekranowaną przez zwartą cewkę.
Przepływy Ф p1 i Ф p2 przechodzą przez różne części nabiegunnika, tzn. są przesunięte w przestrzeni o kąt β. Ponadto są one niezgodne w fazie z MDS F n uzwojeń stojana pod różnymi kątami - γ 1 i γ 2. Wynika to z faktu, że każdy biegun opisywanego silnika można traktować jako pierwsze przybliżenie jako transformator, którego uzwojenie pierwotne jest uzwojeniem stojana, a uzwojenie wtórne jest zwartą cewką. Strumień uzwojenia stojana indukuje siłę elektromotoryczną w zwartej cewce mi do (ryc. 4.65, c), w wyniku czego powstaje prąd I do i MDS F k, składanie z MDS F n uzwojenia stojana. Składnik prądu biernego I zmniejsza przepływ Ф p2, a aktywny - przesuwa go w fazie względem MDS F n. Ponieważ strumień Ф p1 nie obejmuje zwarcia, kąt γ 1 ma stosunkowo małą wartość (4-9 °) - w przybliżeniu taki sam jak kąt przesunięcia fazowego między strumieniem transformatora a MMF pierwotnego nawijanie w trybie bezczynny ruch. Kąt γ 2 jest znacznie większy (około 45°), czyli taki sam jak w transformatorze ze zwartym uzwojeniem wtórnym (np. w przekładniku prądowym). Tłumaczy się to tym, że straty mocy, od których zależy kąt γ 2, są określone nie tylko stratami mocy magnetycznej w stali, ale także stratami elektrycznymi w zwartej cewce.
Ryż. 4.65. Schematy strukturalne silnika jednofazowego z ekranowanymi biegunami i jego
schemat wektorowy:
1
- stojan; 2 -
uzwojenie stojana; 3 -
zwarty
cewka; 4 -
wirnik; 5
- biegun
Przepływy Ф p1 i Ф p2, przesunięte w przestrzeni o kąt β i przesunięte w fazie w czasie o kąt γ = γ 2 - γ l, tworzą eliptyczne wirujące pole magnetyczne (patrz rozdz. 3), które generuje moment obrotowy działający na wirniku silnika w kierunku od pierwszego nabiegunnika, nie objętego zwartą cewką, do drugiej końcówki (zgodnie z naprzemiennymi maksimami przepływu „fazy”).
Aby zwiększyć moment rozruchowy rozważanego silnika poprzez zbliżenie jego pola wirującego do pola kołowego, stosuje się różne metody: między nabiegunnikami sąsiednich biegunów instaluje się boczniki magnetyczne, które poprawiają połączenie magnetyczne między uzwojeniem głównym a zwarciem. obwód cewki i poprawić kształt pola magnetycznego w szczelinie powietrznej; zwiększyć szczelinę powietrzną pod końcówką, nie pokrytą zwartą cewką; użyj dwóch lub więcej zwartych zwojów na jednej końcówce o różnych kątach pokrycia. Istnieją również silniki bez zwartych zwojów na biegunach, ale z asymetrycznym układem magnetycznym: różne konfiguracje poszczególnych części bieguna i różne szczeliny powietrzne. Takie silniki mają niższy moment rozruchowy niż silniki z ekranowanymi biegunami, ale ich sprawność jest wyższa, ponieważ nie mają strat mocy w zwarciu zwojów.
Rozważane konstrukcje silników z ekranowanymi biegunami są nieodwracalne. Do cofania w takich silnikach zamiast zwartych zwojów stosuje się cewki. B1, B2, B3 oraz W 4(ryc. 4.65, w), z których każdy obejmuje pół drążka. Zwarcie pary cewek W 1 oraz W 4 lub W 2 oraz W 3, możliwe jest ekranowanie jednej lub drugiej połowy bieguna, a tym samym zmiana kierunku obrotu pola magnetycznego i wirnika.
Silnik z ekranowanymi biegunami ma szereg istotnych wad: stosunkowo duże gabaryty i waga; niski cos φ ≈ 0,4 ÷ 0,6; niska sprawność η = 0,25 ÷ 0,4 ze względu na duże straty w zwartej cewce; mały moment rozruchowy itp. Zaletami silnika są prostota konstrukcji, a co za tym idzie wysoka niezawodność w działaniu. Ze względu na brak zębów na stojanie hałas silnika jest znikomy, dlatego jest często stosowany w urządzeniach do odtwarzania muzyki i mowy.
Silnik elektryczny jednofazowy 220 V jest oddzielnym mechanizmem, który jest szeroko stosowany do montażu w różnych urządzeniach. Może być używany do celów domowych i przemysłowych. Żywność silnik elektryczny przeprowadzone z zwykłe gniazdo, gdzie koniecznie jest moc co najmniej 220 woltów. W takim przypadku należy zwrócić uwagę na częstotliwość 60 Hz.
W praktyce udowodniono, że jednofazowy silnik elektryczny 220 V sprzedawany jest razem z urządzeniami, które: pomagają przekształcić energię pola elektrycznego, a także gromadzić niezbędny ładunek za pomocą kondensatora. Nowoczesne modele, które są produkowane przy użyciu innowacyjnych technologii, silniki elektryczne 220V są dodatkowo wyposażone w sprzęt do oświetlania miejsca pracy urządzenia. Dotyczy to części wewnętrznych i zewnętrznych.
Należy pamiętać, że pojemność kondensatora musi być przechowywana zgodnie ze wszystkimi podstawowymi wymaganiami. Najlepszą opcją jest gdzie temperatura powietrza pozostaje taka sama i nie podlega żadnym wahaniom. W pokoju reżim temperaturowy nie powinien spaść do wartości ujemnej.
Podczas użytkowania silnika eksperci zalecają od czasu do czasu pomiar wartości pojemności kondensatora.
Silniki indukcyjne są dziś szeroko stosowane w różnych procesach przemysłowych. W przypadku różnych napędów używany jest ten konkretny model silnika elektrycznego. Konstrukcje asynchroniczne jednofazowe pomagają w napędzie maszyn do obróbki drewna, pomp, sprężarek, przemysłowych urządzeń wentylacyjnych, przenośników, wind i wielu innych urządzeń.
Silnik elektryczny służy również do napędzania mechanizacji na małą skalę. Należą do nich rozdrabniacze pasz i betoniarki. Takie konstrukcje należy kupować tylko od zaufanych dostawców. Przed zakupem warto sprawdzić certyfikaty zgodności oraz gwarancję producenta.
Dostawcy muszą zapewnić swoim klientom konserwacja serwisowa silnik elektryczny w przypadku pęknięcia lub awarii. Jest to jeden z głównych elementów, który jest kompletowany podczas montażu zespołu pompowego.
Istniejące serie silników elektrycznych
Dziś przedsiębiorstwa przemysłowe produkujemy następującą serię jednofazowych silników elektrycznych 220V:

Wszystkie silniki podzielone według projektu, zgodnie z metodą instalacji, a także stopniem ochrony. Pozwala to chronić konstrukcję przed wilgocią lub cząsteczkami mechanicznymi.
Cechy silników elektrycznych serii A
Silniki elektryczne jednofazowe serii A to zunifikowane konstrukcje asynchroniczne. Są zamknięte od wpływ zewnętrzny z wirnikiem klatkowym.
Struktura silnika ma następujące grupy wykonawcze:

Koszt jednofazowego silnika elektrycznego 220V zależy od serii.
Jakie są rodzaje silników?

Silniki jednofazowe przeznaczone są do kompletowania napędów elektrycznych do celów domowych i przemysłowych. Takie konstrukcje są produkowane zgodnie z normami państwowymi.