अल्ट्रासोनिक रेंज फाइंडर hc sr04 प्रोग्राम। अल्ट्रासोनिक रेंज फाइंडर HC-SR04। आत्म-पूर्ति के लिए कार्य
आपको चाहिये होगा
- अरुडिनो;
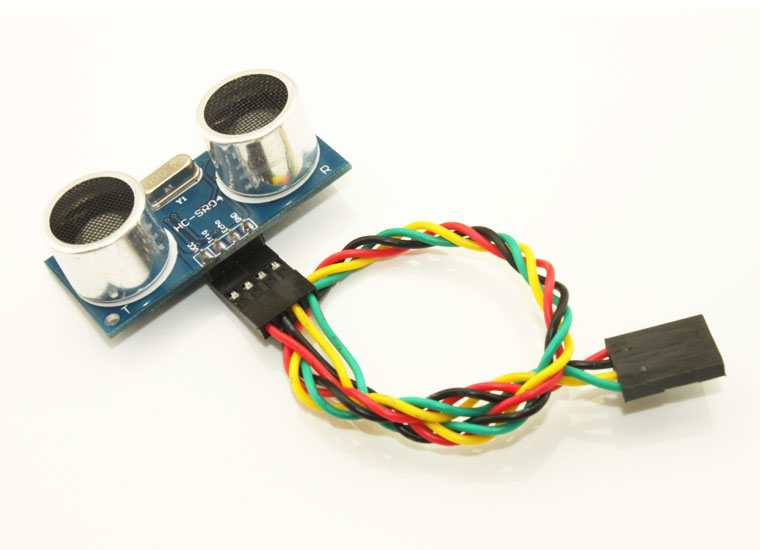
- अल्ट्रासोनिक सेंसर HC-SR04;
- तारों को जोड़ना।
1 परिचालन सिद्धांतअल्ट्रासोनिक रेंज फाइंडर HC-SR04
अल्ट्रासोनिक रेंजफाइंडर HC-SR04 का संचालन इकोलोकेशन के सिद्धांत पर आधारित है। यह ध्वनि स्पंदों को अंतरिक्ष में उत्सर्जित करता है और बाधा से परावर्तित संकेत प्राप्त करता है। वस्तु की दूरी ध्वनि तरंग के बाधा और पीछे के प्रसार समय से निर्धारित होती है।
चित्र 7: चौराहों का प्रतिच्छेदन मोड। सर्वो मोटर की कमी से मोड़ना मुश्किल हो जाता है। इसके अलावा, कार के 180° घुमावों से बचा जाता है क्योंकि उन्हें एक चरण में नहीं किया जा सकता है, जिसकी आवश्यकता होती है, जैसा कि in वास्तविक जीवन, अधिक आंदोलन। इसलिए, हम हमेशा केवल 90° पर ही घुमाव करेंगे। चित्र 7 में, एक कार चौराहे में प्रवेश करती है और बाएं मुड़ने का प्रयास करती है। मशीन पर सेंसर द्वारा उत्पन्न अल्ट्रासोनिक सिग्नल प्रस्तुति के अनुसार प्रचारित होंगे। जब तक दायां सेंसर सामने की दीवार के लंबवत तक नहीं पहुंचता, तब तक उससे प्राप्त मान और सामने वाला सेंसर हमारे द्वारा मोड़ समाप्त करने की तुलना में अधिक दूरी का पता लगाएगा।
ध्वनि तरंग की शुरुआत एक सकारात्मक नाड़ी के साथ शुरू होती है जिसकी अवधि कम से कम 10 माइक्रोसेकंड प्रति पैर ट्रिगरेंजफाइंडर जैसे ही पल्स समाप्त होता है, रेंजफाइंडर अपने सामने के स्थान में 40 kHz की आवृत्ति के साथ ध्वनि दालों के फटने का उत्सर्जन करता है। उसी समय पैर पर गूंजरेंजफाइंडर तार्किक इकाई प्रतीत होता है। जैसे ही सेंसर परावर्तित संकेत को उठाता है, ईसीएचओ पिन पर एक तर्क शून्य दिखाई देता है। ईसीएचओ पिन पर तार्किक इकाई की अवधि (आकृति में "इको विलंब") बाधा की दूरी निर्धारित करती है।
यदि इसे कम गति से निष्पादित किया जाता है और स्थिर रहता है, तो हम मान सकते हैं कि जब हम दो बीमों में से प्रत्येक के लिए न्यूनतम मान तक पहुँच जाते हैं तो मोड़ समाप्त हो जाता है। अंत में, आखिरी बची हुई बात यह है कि मृत अंत में आने पर कार को कैसा व्यवहार करना चाहिए। हम अब वापस नहीं जा सकते, इसलिए हम एक शॉट लेंगे और हम तब तक वापस जाएंगे जब तक हम उस चौराहे पर नहीं पहुंच जाते जहां हम थे।
इंटरफ़ेस का उपयोग करना जितना आसान है और जितना संभव हो विस्तार योग्य है। अंतर्निहित रोबोट एक प्रक्षेपवक्र को बनाए रखने, मोड़ने और भूलभुलैया से बाहर निकलने का रास्ता खोजने के लिए एल्गोरिदम की एक श्रृंखला के आधार पर एक साधारण भूलभुलैया के माध्यम से आगे बढ़ सकता है। एक भूलभुलैया बनाना जिसमें दो या दो से अधिक चौराहे बहुत करीब हैं, या जिनकी दीवारें बिल्कुल सीधी नहीं हैं, कई समस्याओं का कारण बन सकती हैं, जिससे पूरी भूलभुलैया का पता लगाना असंभव हो जाता है या बिना बाधाओं के चलने की दिशा बदल जाती है। यह सीमा इस तथ्य के कारण है कि हम बाहरी वातावरण के साथ बातचीत करने के लिए केवल तीन अल्ट्रासोनिक रिमोट सेंसर का उपयोग करते हैं।
एचसी-एसआर04 दूरी माप सीमा 0.3 सेमी के संकल्प के साथ 4 मीटर तक है। अवलोकन कोण 30 डिग्री है, प्रभावी कोण 15 डिग्री है। ऑपरेशन के दौरान स्टैंडबाय मोड 2 एमए में वर्तमान खपत - 15 एमए।
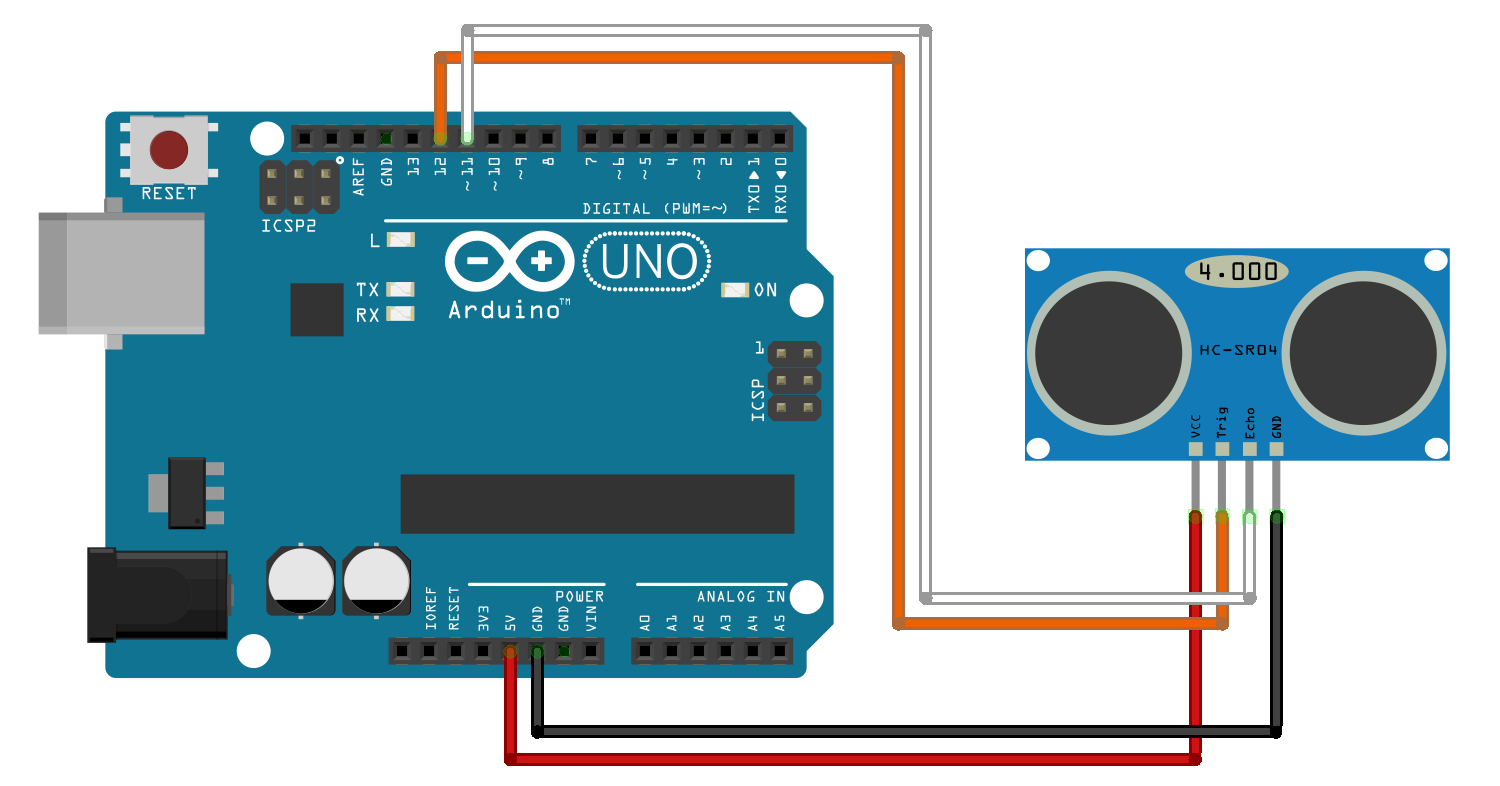
2 वायरिंग का नक्शादूरी सेंसर
अल्ट्रासोनिक रेंजफाइंडर +5 वी द्वारा संचालित होता है। अन्य दो आउटपुट किसी भी Arduino डिजिटल पोर्ट से जुड़े होते हैं, हम 11 और 12 से कनेक्ट होंगे।
एक जाइरोस्कोप एक प्रक्षेपवक्र को स्थापित करने और बनाए रखने में बहुत मददगार होगा, लेकिन यह परियोजना की समग्र लागत को प्रभावित करेगा। 
इस प्रकार, नियंत्रक को नियंत्रित करने के लिए यह एक बहुत ही सरल इंटरफ़ेस है। यदि आप वस्तु को सामने पाते हैं, तो इको पिन उच्च होगा, और अलग-अलग दूरी के आधार पर, इसमें अलग-अलग समय लगेगा उच्च स्तर.
इस तरह हम आसानी से दूरी की गणना कर सकते हैं। अंत में, मॉड्यूल के पीछे देखें। मॉड्यूल में सभी चिप्स को सख्त कर दिया गया है, शायद लेखक साहित्यिक चोरी के निर्माण को रोकना चाहता है। इसे क्रैक करना कोई मुश्किल काम नहीं है, लेकिन यह इतनी कम कीमत पर है, यहां तक कि आपकी कॉपी से भी सस्ता।

3 किसी वस्तु से दूरी प्राप्त करना HC-SR04 सेंसर से
अब एक स्केच लिखते हैं जो बाधा की दूरी निर्धारित करता है और इसे सीरियल पोर्ट पर आउटपुट करता है। सबसे पहले, हम TRIG और ECHO पिन नंबर सेट करते हैं - ये पिन 12 और 11 हैं। फिर हम ट्रिगर को आउटपुट और इको को इनपुट के रूप में घोषित करते हैं। हम सीरियल पोर्ट को 9600 बॉड पर इनिशियलाइज़ करते हैं। चक्र के प्रत्येक पुनरावृत्ति में फंदा()हम दूरी को पढ़ते हैं और इसे पोर्ट पर आउटपुट करते हैं।
वर्किंग वोल्टेज: 5V स्टेटिक करंट: 2mA से कम। आउटपुट सिग्नल: विद्युत आवृत्ति संकेत, उच्च स्तर 5V, कम स्तर 0 वी। सेंसर कोण: 15 डिग्री से अधिक नहीं। 5V बिजली आपूर्ति मॉड्यूल, आउटपुट 5V होगा जबकि बाधा सीमा में है, या 0V यदि नहीं है। इस मॉड्यूल के आउटपुट पिन का उपयोग स्विचिंग आउटपुट के रूप में किया जाता है जब एंटी-थेफ्ट मॉड्यूल होता है, और बिना पैरों के जब रेंज मॉड्यूल होता है। नोट: उच्च स्तर से बचने के लिए बिजली चालू होने से पहले मॉड्यूल को सर्किट में डाला जाना चाहिए। गलत काम, और यदि नहीं, तो फिर से सत्ता।
कॉन्स्ट इंट ट्रिगपिन = 12; कॉन्स्ट इंट इकोपिन = 11; व्यर्थ व्यवस्था()(पिनमोड (ट्रिगपिन, आउटपुट); // ट्रिगर - आउटपुट पिन पिनमोड (इकोपिन, INPUT); // इको - इनपुट सीरियल.बेगिन (9600); // आरंभीकरण अंतिम। बंदरगाह } शून्य लूप () (लंबी दूरी = getDistance (); // सेंसर से दूरी प्राप्त करें Serial.println (दूरी); // सीरियल पोर्ट देरी के लिए आउटपुट (100); } // सेमी . में वस्तु से दूरी निर्धारित करना लंबी गेटडिस्टेंस () (लंबा distacne_cm = getEchoTiming () * 1.7 * 0.01; वापसी distacne_cm; } // देरी के समय को परिभाषित करें लॉन्ग गेटइकोटाइमिंग () ( digitalWrite (ट्रिगपिन, लो); देरीमाइक्रोसेकंड(2); digitalWrite (ट्रिगपिन, हाई); // एक ट्रिगर पल्स देरी उत्पन्न करेंमाइक्रोसेकंड (10); digitalWrite (ट्रिगपिन, लो); // इकोपिन पिन पर उच्च स्तर की अवधि का निर्धारण, एमएस: लंबी अवधि = पल्सइन (इकोपिन, हाई); वापसी की अवधि; }
iarduino_HC_SR04_int लाइब्रेरी को जोड़ना
मॉड्यूल स्वचालित रूप से आठ 40 kHz क्वाडरेचर तरंगें भेजता है और स्वचालित रूप से निर्धारित करता है कि उन्हें प्राप्त करना है या नहीं। पल्स सिग्नल लौटा। यदि सिग्नल वापस आ रहे हैं, तो उच्च स्तर और उच्च स्तर का समय जारी रहता है। अल्ट्रासोनिक ट्रांसमिशन से रिसेप्शन तक का समय।
जब आप साइट ऑर्डर करते हैं, तो आपको एक पुष्टिकरण ईमेल प्राप्त होगा। एक बार आपका ऑर्डर शिप हो जाने के बाद, आपको भेज दिया जाएगा ईमेलअपने आदेश को शिप करने के लिए ट्रैकिंग जानकारी। आप चेकआउट प्रक्रिया के दौरान ऑर्डर सूचना पृष्ठ पर अपनी पसंदीदा शिपिंग विधि का चयन कर सकते हैं। साइट चार अलग-अलग अंतरराष्ट्रीय शिपिंग विधियों की पेशकश करती है।
समारोह गेटइको टाइमिंग ()एक स्टार्ट पल्स उत्पन्न करता है। यह सिर्फ 10-माइक्रोसेकंड पल्स बनाता है, जो रेंजफाइंडर के लिए एक ध्वनि पैकेट को अंतरिक्ष में उत्सर्जित करना शुरू करने के लिए एक ट्रिगर है। तब वह ध्वनि तरंग के संचरण की शुरुआत से लेकर प्रतिध्वनि के आगमन तक के समय को याद करती है।
समारोह गेटडिस्टेंस ()वस्तु से दूरी की गणना करता है। स्कूल भौतिकी पाठ्यक्रम से, हमें याद है कि दूरी समय से गुणा की गई गति के बराबर है: एस = वी × टी हवा में ध्वनि की गति 340 मीटर / सेकेंड है, हम माइक्रोसेकंड (चर) में समय जानते हैं दुरतुओन) समय पाने के लिए दुरतुओनसेकंड में, आपको इसे 1,000,000 से विभाजित करने की आवश्यकता है। चूंकि ध्वनि दो बार दूरी की यात्रा करती है - वस्तु और पीछे - आपको परिणाम को आधे में विभाजित करने की भी आवश्यकता होती है। तो यह पता चलता है कि वस्तु की दूरी एस = 34000 सेमी/सेकंड × अवधि / 1,000,000 सेकंड / 2 = 1.7 सेमी/सेकंड / 100,जो हमने स्केच में लिखा था।
आपके स्थानीय गोदाम से डिलीवरी बहुत तेज है। साथ ही, ट्रांज़िट समय इस बात पर निर्भर करता है कि आप कहाँ स्थित हैं और आपका पैकेज कहाँ स्थित है। यदि आप अधिक जानकारी चाहते हैं, तो कृपया ग्राहक सेवा से संपर्क करें। हम आपकी समस्या का जल्द से जल्द समाधान करेंगे।
यदि क्षति स्क्रीन से संबंधित है, तो इस स्थिति को इस वारंटी द्वारा कवर नहीं माना जाना चाहिए। यदि आप इस उत्पाद की मरम्मत करवाना चाहते हैं, तो कृपया इसे वापस कर दें और हम इसे अपने मरम्मत केंद्रों में भेज देंगे। इस मामले में, आपको वापसी शिपिंग शुल्क और मरम्मत शुल्क का भुगतान करने के लिए जिम्मेदार होना चाहिए। यदि वापसी या मरम्मत प्रक्रिया के दौरान कोई अतिरिक्त लागत आती है, तो इसके लिए आपको भी जिम्मेदार होना चाहिए।
माइक्रोकंट्रोलर विभाजन ऑपरेशन की तुलना में तेजी से गुणा ऑपरेशन करता है, इसलिए :100 मैंने इसे समकक्ष के साथ बदल दिया ×0.01.
4 काम के लिए पुस्तकालयइको साउंडर HC-SR04 . के साथ
साथ ही, कई पुस्तकालयों को अल्ट्रासोनिक रेंजफाइंडर के साथ काम करने के लिए लिखा गया है। उदाहरण के लिए, यहाँ यह अल्ट्रासोनिक लाइब्रेरी है। पुस्तकालय एक मानक तरीके से स्थापित किया गया है: डाउनलोड करें, निर्देशिका को अनज़िप करें /पुस्तकालय/, जो के साथ फ़ोल्डर में स्थित है अरुडिनो आईडीई. उसके बाद, पुस्तकालय का उपयोग किया जा सकता है।
अतिरिक्त कार्य उदाहरण
हम आपको कोई भी शुल्क दिखाते हुए एक चालान भेजेंगे जो हमें उन्हें आपको भेजने से पहले चुकाना होगा। सभी वारंटी दावों को जमा करने की तारीख से 180 दिनों के बाद खारिज कर दिया जाएगा। यदि उत्पाद टूटा हुआ आया है, तो कृपया उस दिन से 3 दिनों के भीतर हमसे संपर्क करें, जिस दिन आपने इसे प्राप्त किया था, और फिर 3-दिन की उत्पाद वारंटी का पालन करें।
यदि आप अपनी खरीद से संतुष्ट नहीं हैं, तो आप इसे डिलीवरी के 3 दिनों के भीतर अपनी खरीद की वापसी, शिपिंग या विनिमय शुल्क घटाकर वापस कर सकते हैं। आपको दोनों दिशाओं में शिपिंग लागत का भुगतान करना होगा जब तक कि कारण हमारी त्रुटि के कारण न हो। कृपया सुनिश्चित करें कि आइटम मूल पैकेजिंग के साथ और उसी स्थिति में लौटाया गया है जिसमें आपने इसे प्राप्त किया था।
पुस्तकालय स्थापित करने के बाद, आइए एक नया स्केच लिखें।
#शामिल
उसके काम का नतीजा वही है - सेंटीमीटर में ऑब्जेक्ट की दूरी सीरियल पोर्ट मॉनिटर में प्रदर्शित होती है।
यदि आप रेखाचित्र में लिखते हैं फ्लोट dist_cm = अल्ट्रासोनिक। रेंजिंग (आईएनसी);- दूरी इंच में प्रदर्शित की जाएगी।
5 कार्य निष्कर्ष HC-SR04 सोनार के साथ
तो, हम Arduino से जुड़े अल्ट्रासोनिक रेंजफाइंडर HC-SR04 और दो से डेटा प्राप्त किया विभिन्न तरीके: एक विशेष पुस्तकालय के साथ और बिना।
पुस्तकालय का उपयोग करने का लाभ यह है कि कोड की मात्रा काफी कम हो जाती है और कार्यक्रम की पठनीयता में सुधार होता है, आपको डिवाइस की पेचीदगियों में तल्लीन करने की आवश्यकता नहीं होती है और आप तुरंत इसका उपयोग कर सकते हैं। लेकिन यह नुकसान भी है: आपको इस बात की कम समझ है कि डिवाइस कैसे काम करता है और इसमें कौन सी प्रक्रियाएं होती हैं। किसी भी मामले में, किस विधि का उपयोग करना है, यह आप पर निर्भर है।
आपको चाहिये होगा
- अरुडिनो;
- अल्ट्रासोनिक सेंसर HC-SR04;
- तारों को जोड़ना।
1 परिचालन सिद्धांतअल्ट्रासोनिक रेंज फाइंडर HC-SR04
अल्ट्रासोनिक रेंजफाइंडर HC-SR04 का संचालन इकोलोकेशन के सिद्धांत पर आधारित है। यह ध्वनि स्पंदों को अंतरिक्ष में उत्सर्जित करता है और बाधा से परावर्तित संकेत प्राप्त करता है। वस्तु की दूरी ध्वनि तरंग के बाधा और पीछे के प्रसार समय से निर्धारित होती है।
चित्र 7: चौराहों का प्रतिच्छेदन मोड। सर्वो मोटर की कमी से मोड़ना मुश्किल हो जाता है। साथ ही, कार के 180° घुमावों से बचा जाता है क्योंकि उन्हें एक कदम में नहीं किया जा सकता है, वास्तविक जीवन में, अधिक गति की आवश्यकता होती है। इसलिए, हम हमेशा केवल 90° पर ही घुमाव करेंगे। चित्र 7 में, एक कार चौराहे में प्रवेश करती है और बाएं मुड़ने का प्रयास करती है। मशीन पर सेंसर द्वारा उत्पन्न अल्ट्रासोनिक सिग्नल प्रस्तुति के अनुसार प्रचारित होंगे। जब तक दायां सेंसर सामने की दीवार के लंबवत तक नहीं पहुंचता, तब तक उससे प्राप्त मान और सामने वाला सेंसर हमारे द्वारा मोड़ समाप्त करने की तुलना में अधिक दूरी का पता लगाएगा।
ध्वनि तरंग की शुरुआत एक सकारात्मक नाड़ी के साथ शुरू होती है जिसकी अवधि कम से कम 10 माइक्रोसेकंड प्रति पैर ट्रिगरेंजफाइंडर जैसे ही पल्स समाप्त होता है, रेंजफाइंडर अपने सामने के स्थान में 40 kHz की आवृत्ति के साथ ध्वनि दालों के फटने का उत्सर्जन करता है। उसी समय पैर पर गूंजरेंजफाइंडर तार्किक इकाई प्रतीत होता है। जैसे ही सेंसर परावर्तित संकेत को उठाता है, ईसीएचओ पिन पर एक तर्क शून्य दिखाई देता है। ईसीएचओ पिन पर तार्किक इकाई की अवधि (आकृति में "इको विलंब") बाधा की दूरी निर्धारित करती है।
यदि इसे कम गति से निष्पादित किया जाता है और स्थिर रहता है, तो हम मान सकते हैं कि जब हम दो बीमों में से प्रत्येक के लिए न्यूनतम मान तक पहुँच जाते हैं तो मोड़ समाप्त हो जाता है। अंत में, आखिरी बची हुई बात यह है कि मृत अंत में आने पर कार को कैसा व्यवहार करना चाहिए। हम अब वापस नहीं जा सकते, इसलिए हम एक शॉट लेंगे और हम तब तक वापस जाएंगे जब तक हम उस चौराहे पर नहीं पहुंच जाते जहां हम थे।
इंटरफ़ेस का उपयोग करना जितना आसान है और जितना संभव हो विस्तार योग्य है। अंतर्निहित रोबोट एक प्रक्षेपवक्र को बनाए रखने, मोड़ने और भूलभुलैया से बाहर निकलने का रास्ता खोजने के लिए एल्गोरिदम की एक श्रृंखला के आधार पर एक साधारण भूलभुलैया के माध्यम से आगे बढ़ सकता है। एक भूलभुलैया बनाना जिसमें दो या दो से अधिक चौराहे बहुत करीब हैं, या जिनकी दीवारें बिल्कुल सीधी नहीं हैं, कई समस्याओं का कारण बन सकती हैं, जिससे पूरी भूलभुलैया का पता लगाना असंभव हो जाता है या बिना बाधाओं के चलने की दिशा बदल जाती है। यह सीमा इस तथ्य के कारण है कि हम बाहरी वातावरण के साथ बातचीत करने के लिए केवल तीन अल्ट्रासोनिक रिमोट सेंसर का उपयोग करते हैं।
एचसी-एसआर04 दूरी माप सीमा 0.3 सेमी के संकल्प के साथ 4 मीटर तक है। अवलोकन कोण 30 डिग्री है, प्रभावी कोण 15 डिग्री है। ऑपरेशन के दौरान स्टैंडबाय मोड 2 एमए में वर्तमान खपत - 15 एमए।
2 वायरिंग का नक्शादूरी सेंसर
अल्ट्रासोनिक रेंजफाइंडर +5 वी द्वारा संचालित होता है। अन्य दो आउटपुट किसी भी Arduino डिजिटल पोर्ट से जुड़े होते हैं, हम 11 और 12 से कनेक्ट होंगे।
एक जाइरोस्कोप एक प्रक्षेपवक्र को स्थापित करने और बनाए रखने में बहुत मददगार होगा, लेकिन यह परियोजना की समग्र लागत को प्रभावित करेगा।
इस प्रकार, नियंत्रक को नियंत्रित करने के लिए यह एक बहुत ही सरल इंटरफ़ेस है। यदि आप वस्तु को सामने पाते हैं, तो इको पिन उच्च होगा, और अलग-अलग दूरी के आधार पर, यह एक अलग उच्च स्तरीय अवधि लेगा।
इस तरह हम आसानी से दूरी की गणना कर सकते हैं। अंत में, मॉड्यूल के पीछे देखें। मॉड्यूल में सभी चिप्स को सख्त कर दिया गया है, शायद लेखक साहित्यिक चोरी के निर्माण को रोकना चाहता है। इसे क्रैक करना कोई मुश्किल काम नहीं है, लेकिन यह इतनी कम कीमत पर है, यहां तक कि आपकी कॉपी से भी सस्ता।
3 किसी वस्तु से दूरी प्राप्त करना HC-SR04 सेंसर से
अब एक स्केच लिखते हैं जो बाधा की दूरी निर्धारित करता है और इसे सीरियल पोर्ट पर आउटपुट करता है। सबसे पहले, हम TRIG और ECHO पिन नंबर सेट करते हैं - ये पिन 12 और 11 हैं। फिर हम ट्रिगर को आउटपुट और इको को इनपुट के रूप में घोषित करते हैं। हम सीरियल पोर्ट को 9600 बॉड पर इनिशियलाइज़ करते हैं। चक्र के प्रत्येक पुनरावृत्ति में फंदा()हम दूरी को पढ़ते हैं और इसे पोर्ट पर आउटपुट करते हैं।
वर्किंग वोल्टेज: 5V स्टेटिक करंट: 2mA से कम। आउटपुट सिग्नल: विद्युत आवृत्ति संकेत, उच्च स्तर 5V, निम्न स्तर 0V। सेंसर कोण: 15 डिग्री से अधिक नहीं। 5V बिजली आपूर्ति मॉड्यूल, आउटपुट 5V होगा जबकि बाधा सीमा में है, या 0V यदि नहीं है। इस मॉड्यूल के आउटपुट पिन का उपयोग स्विचिंग आउटपुट के रूप में किया जाता है जब एंटी-थेफ्ट मॉड्यूल होता है, और बिना पैरों के जब रेंज मॉड्यूल होता है। नोट: उच्च स्तर से बचने के लिए बिजली चालू होने से पहले मॉड्यूल को सर्किट में डाला जाना चाहिए। गलत काम, और यदि नहीं, तो फिर से सत्ता।
कॉन्स्ट इंट ट्रिगपिन = 12; कॉन्स्ट इंट इकोपिन = 11; व्यर्थ व्यवस्था()(पिनमोड (ट्रिगपिन, आउटपुट); // ट्रिगर - आउटपुट पिन पिनमोड (इकोपिन, INPUT); // इको - इनपुट सीरियल.बेगिन (9600); // आरंभीकरण अंतिम। बंदरगाह } शून्य लूप () (लंबी दूरी = getDistance (); // सेंसर से दूरी प्राप्त करें Serial.println (दूरी); // सीरियल पोर्ट देरी के लिए आउटपुट (100); } // सेमी . में वस्तु से दूरी निर्धारित करना लंबी गेटडिस्टेंस () (लंबा distacne_cm = getEchoTiming () * 1.7 * 0.01; वापसी distacne_cm; } // देरी के समय को परिभाषित करें लॉन्ग गेटइकोटाइमिंग () ( digitalWrite (ट्रिगपिन, लो); देरीमाइक्रोसेकंड(2); digitalWrite (ट्रिगपिन, हाई); // एक ट्रिगर पल्स देरी उत्पन्न करेंमाइक्रोसेकंड (10); digitalWrite (ट्रिगपिन, लो); // इकोपिन पिन पर उच्च स्तर की अवधि का निर्धारण, एमएस: लंबी अवधि = पल्सइन (इकोपिन, हाई); वापसी की अवधि; }
iarduino_HC_SR04_int लाइब्रेरी को जोड़ना
मॉड्यूल स्वचालित रूप से आठ 40 kHz क्वाडरेचर तरंगें भेजता है और स्वचालित रूप से निर्धारित करता है कि उन्हें प्राप्त करना है या नहीं। पल्स सिग्नल लौटा। यदि सिग्नल वापस आ रहे हैं, तो उच्च स्तर और उच्च स्तर का समय जारी रहता है। अल्ट्रासोनिक ट्रांसमिशन से रिसेप्शन तक का समय।
जब आप साइट ऑर्डर करते हैं, तो आपको एक पुष्टिकरण ईमेल प्राप्त होगा। एक बार आपका ऑर्डर भेज दिए जाने के बाद, आपके ऑर्डर को शिप करने के लिए ट्रैकिंग जानकारी आपको ईमेल की जाएगी। आप चेकआउट प्रक्रिया के दौरान ऑर्डर सूचना पृष्ठ पर अपनी पसंदीदा शिपिंग विधि का चयन कर सकते हैं। साइट चार अलग-अलग अंतरराष्ट्रीय शिपिंग विधियों की पेशकश करती है।
समारोह गेटइको टाइमिंग ()एक स्टार्ट पल्स उत्पन्न करता है। यह सिर्फ 10-माइक्रोसेकंड पल्स बनाता है, जो रेंजफाइंडर के लिए एक ध्वनि पैकेट को अंतरिक्ष में उत्सर्जित करना शुरू करने के लिए एक ट्रिगर है। तब वह ध्वनि तरंग के संचरण की शुरुआत से लेकर प्रतिध्वनि के आगमन तक के समय को याद करती है।
समारोह गेटडिस्टेंस ()वस्तु से दूरी की गणना करता है। स्कूल भौतिकी पाठ्यक्रम से, हमें याद है कि दूरी समय से गुणा की गई गति के बराबर है: एस = वी × टी हवा में ध्वनि की गति 340 मीटर / सेकेंड है, हम माइक्रोसेकंड (चर) में समय जानते हैं दुरतुओन) समय पाने के लिए दुरतुओनसेकंड में, आपको इसे 1,000,000 से विभाजित करने की आवश्यकता है। चूंकि ध्वनि दो बार दूरी की यात्रा करती है - वस्तु और पीछे - आपको परिणाम को आधे में विभाजित करने की भी आवश्यकता होती है। तो यह पता चलता है कि वस्तु की दूरी एस = 34000 सेमी/सेकंड × अवधि / 1,000,000 सेकंड / 2 = 1.7 सेमी/सेकंड / 100,जो हमने स्केच में लिखा था।
आपके स्थानीय गोदाम से डिलीवरी बहुत तेज है। साथ ही, ट्रांज़िट समय इस बात पर निर्भर करता है कि आप कहाँ स्थित हैं और आपका पैकेज कहाँ स्थित है। यदि आप अधिक जानकारी चाहते हैं, तो कृपया ग्राहक सेवा से संपर्क करें। हम आपकी समस्या का जल्द से जल्द समाधान करेंगे।
यदि क्षति स्क्रीन से संबंधित है, तो इस स्थिति को इस वारंटी द्वारा कवर नहीं माना जाना चाहिए। यदि आप इस उत्पाद की मरम्मत करवाना चाहते हैं, तो कृपया इसे वापस कर दें और हम इसे अपने मरम्मत केंद्रों में भेज देंगे। इस मामले में, आपको वापसी शिपिंग शुल्क और मरम्मत शुल्क का भुगतान करने के लिए जिम्मेदार होना चाहिए। यदि वापसी या मरम्मत प्रक्रिया के दौरान कोई अतिरिक्त लागत आती है, तो इसके लिए आपको भी जिम्मेदार होना चाहिए।
माइक्रोकंट्रोलर विभाजन ऑपरेशन की तुलना में तेजी से गुणा ऑपरेशन करता है, इसलिए :100 मैंने इसे समकक्ष के साथ बदल दिया ×0.01.
4 काम के लिए पुस्तकालयइको साउंडर HC-SR04 . के साथ
साथ ही, कई पुस्तकालयों को अल्ट्रासोनिक रेंजफाइंडर के साथ काम करने के लिए लिखा गया है। उदाहरण के लिए, यहाँ यह अल्ट्रासोनिक लाइब्रेरी है। पुस्तकालय एक मानक तरीके से स्थापित किया गया है: डाउनलोड करें, निर्देशिका को अनज़िप करें /पुस्तकालय/, जो Arduino IDE फ़ोल्डर में स्थित है। उसके बाद, पुस्तकालय का उपयोग किया जा सकता है।
अतिरिक्त कार्य उदाहरण
हम आपको कोई भी शुल्क दिखाते हुए एक चालान भेजेंगे जो हमें उन्हें आपको भेजने से पहले चुकाना होगा। सभी वारंटी दावों को जमा करने की तारीख से 180 दिनों के बाद खारिज कर दिया जाएगा। यदि उत्पाद टूटा हुआ आया है, तो कृपया उस दिन से 3 दिनों के भीतर हमसे संपर्क करें, जिस दिन आपने इसे प्राप्त किया था, और फिर 3-दिन की उत्पाद वारंटी का पालन करें।
यदि आप अपनी खरीद से संतुष्ट नहीं हैं, तो आप इसे डिलीवरी के 3 दिनों के भीतर अपनी खरीद की वापसी, शिपिंग या विनिमय शुल्क घटाकर वापस कर सकते हैं। आपको दोनों दिशाओं में शिपिंग लागत का भुगतान करना होगा जब तक कि कारण हमारी त्रुटि के कारण न हो। कृपया सुनिश्चित करें कि आइटम मूल पैकेजिंग के साथ और उसी स्थिति में लौटाया गया है जिसमें आपने इसे प्राप्त किया था।
पुस्तकालय स्थापित करने के बाद, आइए एक नया स्केच लिखें।
#शामिल
उसके काम का नतीजा वही है - सेंटीमीटर में ऑब्जेक्ट की दूरी सीरियल पोर्ट मॉनिटर में प्रदर्शित होती है।
यदि आप रेखाचित्र में लिखते हैं फ्लोट dist_cm = अल्ट्रासोनिक। रेंजिंग (आईएनसी);- दूरी इंच में प्रदर्शित की जाएगी।
5 कार्य निष्कर्ष HC-SR04 सोनार के साथ
इसलिए, हमने एक HC-SR04 अल्ट्रासोनिक रेंजफाइंडर को Arduino से जोड़ा और इससे दो अलग-अलग तरीकों से डेटा प्राप्त किया: एक विशेष पुस्तकालय का उपयोग करके और बिना।
पुस्तकालय का उपयोग करने का लाभ यह है कि कोड की मात्रा काफी कम हो जाती है और कार्यक्रम की पठनीयता में सुधार होता है, आपको डिवाइस की पेचीदगियों में तल्लीन करने की आवश्यकता नहीं होती है और आप तुरंत इसका उपयोग कर सकते हैं। लेकिन यह नुकसान भी है: आपको इस बात की कम समझ है कि डिवाइस कैसे काम करता है और इसमें कौन सी प्रक्रियाएं होती हैं। किसी भी मामले में, किस विधि का उपयोग करना है, यह आप पर निर्भर है।