Оптични сензори за линейно преместване достойнство. Сензори за движение. Комуникации и комуникации
Тема: Изследване на работата на сензори за линейни и ъглови премествания
Цел: Изучаване на принципа на действие, устройство и устройство на датчици за линейни и ъглови премествания.
Упражнение:
1. Разгледайте принципите на работа и схемите за конструиране на сензори линейно движение: капацитивен; оптичен; индуктивен; вихров ток; ултразвукови; магниторезистивен; потенциометрични.
Максимална гъвкавост и лекота на използване
Сензори за линейно положение във външен монтаж. Магнитострикционни сензори за линейно положение гарантират висока ефективности качество в производството на бетонови блокове. В машината за бетонни блокове магнитостриктивните сензори за линейно положение измерват едновременно и надеждно аксиалното положение на приложеното натоварване и генерират повдигащо движение.
Глобална стандартна обратна връзка на хидравличния цилиндър
Сензори за линейно преместване на пръта. 
Те са изключително подходящи за използване в хидравлични цилиндри, използвани в индустрии като обработка на стомана, дървен материал и производство на гуми. Налични са множество опции за електрически интерфейс за адаптиране към всяка система за управление.
2. Разгледайте принципите на работа и схемите за конструиране на сензори за ъглово изместване: оптични; магнитни; магниторезистор.
3. Направете заключение върху работата.
Теоретична част:
Сензорът за изместване е устройство, предназначено да определя големината на линейното или ъгловото механично изместване на обект.
Системи за обратна връзка на цилиндъра за тежки, взискателни условия
Здрави сензори за линейно положение. 
Техният безконтактен принцип на работа предотвратява износването и осигурява почти неограничен експлоатационен живот. Здравите линейни енкодери сигнализират правилно позицията на буталото и осигуряват плавно пробиване.
Напълно излишни дизайни за критични приложения

С резервирани линейни енкодери, до три независими измервателни секции и три независими електронни модула са компактно интегрирани в един прът.
Капацитивни сензори за преместване
Работата на сензори от този тип се основава на връзката между капацитета на кондензатора и неговата геометрична конфигурация. В най-простия случай говорим за промяна на разстоянието между плочите поради външно физическо въздействие (Фигура 1). Тъй като капацитетът на кондензатора варира обратно пропорционално на размера на празнината между плочите, определянето на капацитета с други известни параметри дава възможност да се прецени разстоянието между плочите. Промяната в капацитета може да бъде фиксирана по различни начини (например чрез измерване на неговия импеданс), но във всеки случай кондензаторът трябва да бъде включен в електрическата верига.
Прътови линейни преобразуватели за линейно положение със световни сертификати за взривоустойчивост
Сензори за линейно положение за опасни места. 
Възвратните и спирателни вентили се използват в много области на производство на нефт и газ, рафинерии и нефтохимически заводи.
Изключително точното измерване на нивото на пълнене гарантира строги хигиенни стандарти

Със своето високо качество на повърхността и заоблени ръбове, той отговаря на най-високите международни хигиенни стандарти и улеснява прилагането например на строгите изисквания на хранително-вкусовата промишленост.
Фигура 1. Капацитивен сензор за линейно изместване с различна междина.
Друга схема, където е изходният параметър електрически капацитет, е верига, съдържаща кондензатор с движещ се диелектрик (Фигура 2). Преместването на диелектричната плоча между плочите на кондензатора също води до промяна в неговия капацитет. Плочата може да бъде механично свързана с обекта, който представлява интерес, в който случай промяната в капацитета е показателна за движението на обекта. Освен това, ако самият обект има свойствата на диелектрик и има подходящи размери, той може да се използва директно като диелектрична среда в кондензатор.
Индустриални измервателни системи
Произвежда се от от неръждаема стоманас полирана повърхност и заоблени ръбове. Отворена греда Правоъгълен профил Цилиндричен профил. Покрит курсор Предно стъбло без пружинно връщане Предно странично стъбло с пружинно връщане Предно и задно едностранно стъбло без пружинно връщане Предно и задно едностранно стъбло с пружинно връщане.
Кой принцип на измерване е най-подходящ за съответната задача на измерване зависи от условията. околен свят, динамика, определена точност и, разбира се, разстоянието за измерване. В магнитострикционните сензори за разстояние, електронната обработка на сигнала винаги се интегрира след измерване на работното време. Нашият богат опит в печатарската, текстилната и медицинската технология ви помага бързо да намерите и спестите пари. Предлагат се различни видове, оптимално проектирани за пестене на място, надеждност и точност.

Фигура 2. Капацитивен сензор за линейно изместване с движещ се диелектрик.
Оптични сензори за преместване
Има много вариации на схеми на сензори за изместване, базирани на различни оптични ефекти. Може би най-популярната е схемата за оптична триангулация - сензорът за позиция всъщност е далекомер, който определя разстоянието до обекта на интерес, фиксира радиацията, разпръсната от повърхността на обекта и определя ъгъла на отражение, което прави възможно е да се определи дължината d - разстоянието до обекта (Фигура 3). Важно предимство на повечето оптични сензори е възможността за извършване на безконтактни измервания, освен това такива сензори обикновено са доста точни и имат висока скорост.
Тази страница ще ви даде общ преглед на работата, приложението, теорията и ресурсите на капацитивния сензор. Предоставени са и връзки към по-подробна информация. Състезанието имаше 4 седмици време за цитиране и 8 седмици доставка до продукта. Нанометричната разделителна способност на високоефективните капацитивни сензори ги прави незаменими в днешния свят на нанотехнологиите. Те могат също да се използват за измерване на позицията или други свойства на непроводими цели.
Предимства пред магнитострикционните сензори
Използване на капацитивни сензори електрически свойства"капацитет" за измервания. Капацитетът е свойство, което съществува между всеки две проводими повърхности в някаква разумна близост. Промяната на разстоянието между повърхностите променя капацитета. Именно тази промяна в капацитета прави възможно използването на капацитивни сензори за промяна на позицията на целта. Високоефективните сензори за изместване използват малки чувствителни повърхности и в резултат на това са разположени близо до целите.
Фигура 3. Оптичен сензор за изместване, базиран на оптична триангулационна схема.
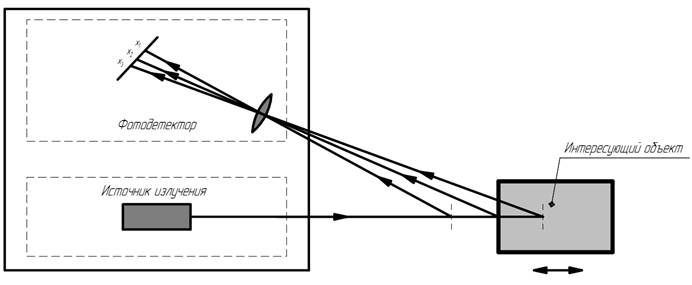
В друго изпълнение на оптичния сензор, предназначен да регистрира и определя параметрите на малки премествания и вибрации, се използва структура с двойна решетка, както и източник на светлина и фотодетектор (Фигура 4). Едната решетка е неподвижна, втората е подвижна и може да бъде механично фиксирана върху обекта на интерес или по някакъв начин да предава движението си на сензора. Малко изместване на подвижната решетка води до промяна в интензитета на светлината, записана от фотодетектора, и с намаляване на периода на решетка, точността на сензора се увеличава, но неговият динамичен диапазон се стеснява.
Високопроизводителна капацитивна сензорна система. Важно е да се прави разлика между "високоефективни" капацитивни линейни енкодери и евтини капацитивни линейни енкодери. Простите капацитивни сензори, като тези, използвани в евтини превключватели за близост или сензорни превключватели на асансьори, са прости устройстваи в най-основната си форма могат да бъдат разработени в гимназиален клас по електроника. Сензорите за близост са изключително полезни в приложенията за автоматизация и много налични в търговската мрежа модели са добре направени, но не са подходящи за високопрецизни метрологични приложения.

Фигура 4. Оптичен сензор за изместване, базиран на дифракционни решетки.
Допълнителни функцииприложения имат оптични сензори, които отчитат поляризацията на светлината. В такива сензори може да се реализира алгоритъм за избор на обекти според отразяващите свойства на повърхността, т.е. сензорът може да "обърне внимание" само на обекти с добра отразяваща способност, останалите обекти се игнорират. Разбира се, чувствителността към поляризацията се отразява негативно на цената на такива устройства.
Има три класа сензори
За разлика от това, капацитивните сензори за изместване за използване при прецизни измервания и метрологични измервания използват сложни електронни конструкции за изпълнение на сложни математически алгоритми. За разлика от евтините сензори, тези високоефективни сензори имат линейни, стабилни изходи с температура и са способни да разрешават невероятно малки промени в капацитета, което води до измервания с висока разделителна способност под един нанометър.
В сравнение с други безконтактни сензорни технологии като оптични, лазерни, вихрови токови и индуктивни, високоефективните капацитивни сензори предлагат определени предимства. Нечувствителен към промени в материала: капацитивните сензори реагират еднакво на всички проводници.
- По-високи разделителни способности, включително субметрови.
- По-евтин и много по-малък от лазерните интерферометри.
Индуктивни сензори за преместване
В една конфигурация на този тип сензор чувствителният елемент е трансформатор с подвижна сърцевина. Движението на външен обект кара сърцевината да се движи, което причинява промяна в свързването на потока между първичната и вторичната намотка на трансформатора (Фигура 5). Тъй като амплитудата на сигнала във вторичната намотка зависи от връзката на потока, големината на амплитудата на вторичната намотка може да се използва за преценка на позицията на сърцевината и следователно позицията на външния обект.
Мръсна или влажна среда Изисква голямо разстояние между сензора и целта. . На по-подробната страница "Теория на капацитивните сензори". Капацитивните сензори имат много повече висока чувствителностна проводници, отколкото на непроводници. Пример е свързващ монтаж, изискващ вътрешен метален задържащ пръстен, който не се вижда в крайния монтаж. Онлайн капацитивното отчитане може да открие дефектната част и да сигнализира на системата да я премахне от линията.
Преглед на капацитивните сензори
Капацитивните сензори с висока производителност обикновено се състоят от електронен модул и сонда, която е свързана към модула чрез кабел. Тези системи се предлагат в различни конфигурации и ценови точки. Капацитивните сензори имат модулен дизайн, при който един или повече канали от електронни модули са затворени в модулна стойка.
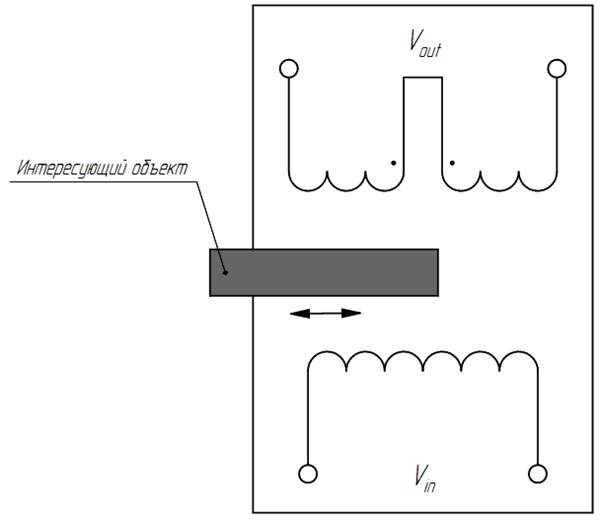
Фигура 5. Индуктивен сензор за изместване на трансформатор.
Друга конфигурация има повече проста верига, обаче, той е подходящ само за малък брой приложения, където е необходимо да се определят малки движения или вибрации на обекти, състоящи се от феромагнитен материал. В тази схема феромагнитният обект, който представлява интерес, играе ролята на магнитна верига, чието положение влияе върху индуктивността на измервателната намотка (Фигура 6).
Осигурени са отделни съединители за изходи за захранване и изходи на сензори. Цветни канали за сонда за лесна настройка. Липсата на потребителски настройки предотвратява неточни показания, причинени от "грешка на оператора". Изходът от този сензор е повторяем, но не линеен. Системата се използва в сервосистеми с „търсене на нула“, където изходите на капацитивния сензор се използват за управление на системата в известно добро състояние, вместо да се измерва степента, до която системата е извън толеранса.
Използва се и когато е зададено прагово напрежение, при което се задейства някакво условно действие. За повече информация относно капацитивните сензорни продукти, моля, посетете. Какво е датчик за преместване? Сензорът за изместване е устройство, което измерва разстоянието между сензор и обект, като определя количеството на изместване чрез набор от елементи и го преобразува в разстояние. В зависимост от това кой елемент се използва, има няколко вида сензори като оптични сензори за изместване, линейни сензори за близост и ултразвукови сензори за изместване.
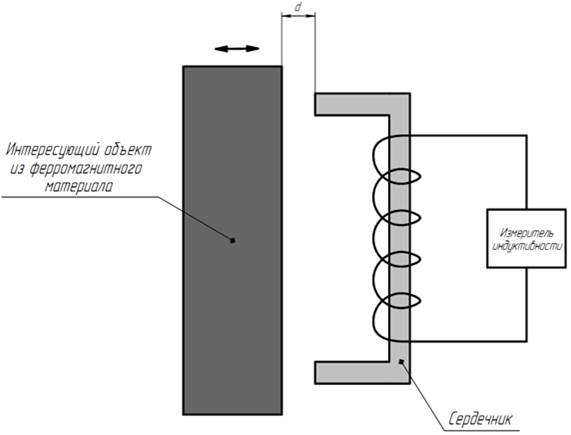
Фигура 6. Индуктивен сензор за изместване за обекти, изработени от феромагнитни материали.
Сензори за вихрови токове на преместване
Сензорите от този тип съдържат генератор магнитно полеи регистратор, с помощта на който се определя големината на индукцията на вторичните магнитни полета. В близост до обекта на интерес генераторът създава магнитно поле, което, прониквайки в материала на обекта, генерира вихрови токове (токове на Фуко) в неговия обем, които от своя страна създават вторично магнитно поле (Фигура 7). Параметрите на вторичното поле се определят от регистратора и на тяхна база се изчислява разстоянието до обекта, тъй като колкото по-близо е обектът, толкова по-голям магнитен поток ще проникне в неговия обем, което ще увеличи вихровите токове и индукцията на вторично магнитно поле. Подобен принцип се използва и при вихровотокови дефектоскопи, но там параметрите на вторичното магнитно поле се влияят не от разстоянието до обекта, а от наличието на скрити несъвършенства във вътрешната му структура. Методът е безконтактен, но може да се използва само за метални тела.
Можете да измерите физическия размер на обект. Сензорът за преместване измерва и открива промените във физическото количество. Сензорът може да измерва височината, ширината и дебелината на обект, като определя размера на изместването на този обект. Сензорът за измерване измерва позицията и размерите на даден обект.
аналогов изход физични величинисъщо може да се извърши. Някои модели поддържат и цифрова комуникация. Принципи на работа и класификация. Триангулационен метод на измерване. Тези сензори използват система за измерване на триангулация. Светлината от светлинен източник се кондензира от леща и се насочва към обекта.
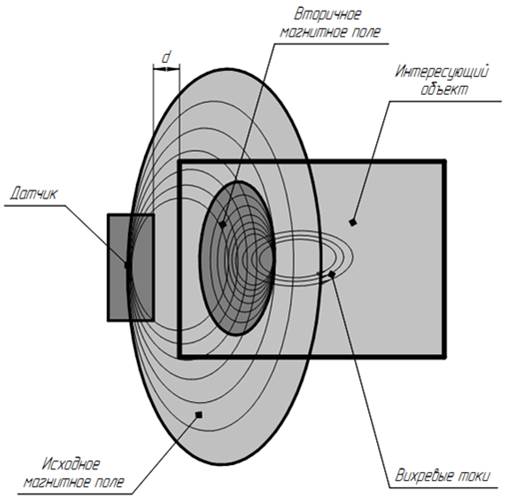
Фигура 7. Сензор за изместване на вихров ток.
Ултразвукови сензори за преместване
Принципът на радара се реализира в ултразвукови сензори - ултразвуковите вълни, отразени от обекта, се записват, следователно блоковата диаграма обикновено се представя от източник на ултразвукови вълни и записващо устройство (Фигура 8), които обикновено са затворени в компактен корпус. Определянето на забавянето във времето между моментите на изпращане и получаване на ултразвуков импулс дава възможност да се измери разстоянието до обект с точност до десети от милиметъра. Днес, наред с оптичните сензори, ултразвуковите сензори са може би най-универсалният и технологично усъвършенстван безконтактен измервателен уред. Използването на този принцип на измерване отново може да се намери в дефектоскопите, само че този път в ултразвуковите дефектоскопи.
Модел на редовно отражение и модел на дифузно отражение. Огледален образ се получава например от огледало или лъскав предмет. Лъчът се отразява във всички посоки от обект със стандартна повърхност. Светлината от обекта се отразява директно чрез редовно отражение и е възможно стабилно измерване за метални и други предмети с лъскава повърхност.
Светлинният лъч се проектира перпендикулярно върху повърхността на обекта и разсеяната светлина, която се отразява обратно, се получава за широка зона на измерване. Регулярно отразяващите сензорни глави получават директна светлина от редовни отражения от обект. Стабилни измервания могат да бъдат постигнати за обекти, изработени от метал или други материали с лъскава повърхност, но има по-тесен обхват на измерване от дифузно-отражателните сензори. Сензорите с дифузно отразяване използват сензорна глава, наклонена под ъгъл, за да произвеждат светлина с редовно отражение.
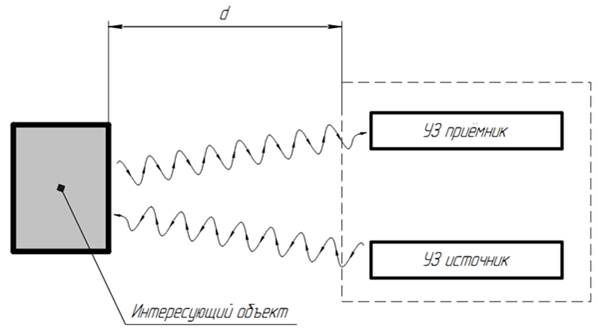
Фигура 8. Ултразвуков сензор за изместване.
Магниторезистивни сензори за преместване
В магниторезистивните сензори за преместване се използва зависимостта електрическо съпротивлениемагнитосъпротивителни пластини върху посоката и големината на индукцията на външното магнитно поле. Сензорът обикновено се състои от постоянен магнит и електрическа веригасъдържащи магнитосъпротивителни пластини, свързани в мостова верига и източник постоянно напрежение(Фигура 9). Интересен обект, състоящ се от феромагнитен материал, движещ се в магнитно поле, променя конфигурацията си, в резултат на което съпротивлението на плочите се променя и мостовата верига регистрира несъответствие, по чиято величина може да се съди позицията на обекта.
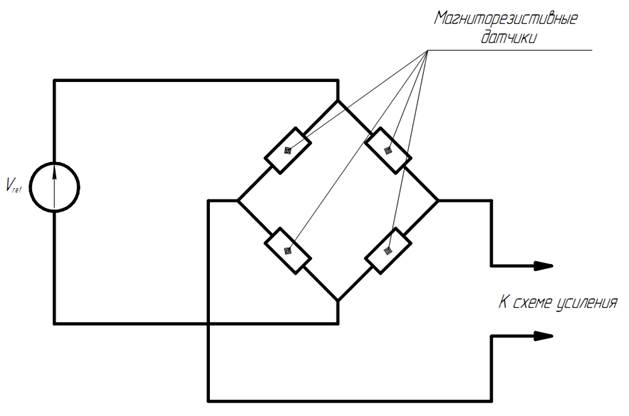
Фигура 9. Магниторезистивни сензори за изместване.
Сензори с ефект на Хол
Сензорите от този тип имат конструкция, подобна на тази на магниторезистивните сензори, но тяхната работа се основава на ефекта на Хол - преминаването на ток през проводник, който се влияе от външно магнитно поле, води до появата на потенциална разлика в напречно сечениедиригент.
Магнитострикционни сензори за преместване
По правило магнитострикционният сензор е разширен канал - вълновод, по който постоянен пръстеновиден магнит може да се движи свободно. Вътре във вълновода има проводник, способен да създава магнитно поле по цялата му дължина, когато към него се прилагат електрически импулси (Фигура 10). Полученото магнитно поле се добавя към полето на постоянен магнит и полученото поле създава момент на въртене на канала, съдържащ вълновода (ефект на Weidemann). Ротационните импулси се разпространяват по канала в двете посоки със скоростта на звука на материала на канала. Регистрирането на забавянето във времето между изпращането на електрически импулс и получаването на ротационен импулс позволява да се определи разстоянието до постоянния магнит, т.е. определи позицията му. Каналът може да има доста голяма дължина(до няколко метра), а позицията на магнита може да се определи с точност до няколко микрометра. Магнитострикционните сензори имат отлична повторяемост, разделителна способност, устойчивост на неблагоприятни условия и ниска чувствителност към температурни промени.
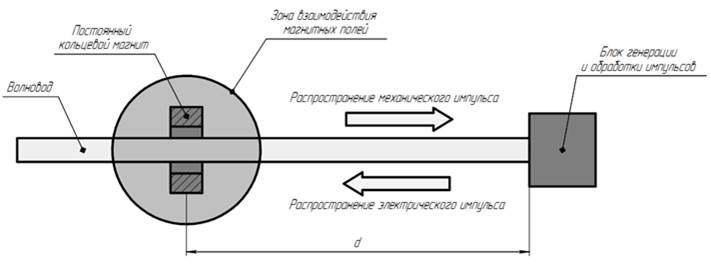
Фигура 10. Магнитострикционен сензор за изместване.
Потенциометрични сензори за преместване
Този тип сензор основно има електрическа верига, съдържаща потенциометър (Фигура 11). Линейното движение на обекта води до промяна в съпротивлението на потенциометъра ( променлив резистор). Ако през потенциометъра премине постоянен ток, тогава спадът на напрежението върху него ще бъде пропорционален на стойността на съпротивлението и, следователно, на големината на линейното изместване на обекта, който ни интересува.

Фигура 11. Потенциометричен сензор за преместване.
Заедно с механичните сензори за преместване, потенциометричните сензори са най-широко използвани поради тяхната простота и ниска цена, но сензорите, базирани на оптични ефекти, все повече се използват за универсални, прецизни и безконтактни измервания.
Контролер (сензор) на позицията на въртящ се обект или по друг начин енкодер- Това е електромеханично устройство, с което можете да определите позицията на въртяща се ос (вал). В това устройство механичното движение се преобразува в електрически сигнали, които определят позицията на обекта, предоставят информация за ъгъла на въртене на вала, неговото положение и посока на въртене. С енкодера можете също да измервате дължина и разстояние или да задавате ход на инструмента.
Енкодерите имат широк спектър от приложения в печатарската индустрия, металообработката, елеваторната техника, машините за пълнене, опаковане и пълнене, тестови стендове, както и в роботи и други машини, които изискват точно записване на движението на частите. Те почти напълно замениха широко разпространените преди това селсини.
Видове енкодери
Има следните видове енкодери: инкрементални (инкрементални) и абсолютни.
Изпратете добрата си работа в базата знания е лесно. Използвайте формата по-долу
Студенти, докторанти, млади учени, които използват базата от знания в обучението и работата си, ще ви бъдат много благодарни.
публикувано на http://www.allbest.ru/
МИНИСТЕРСТВО НА ОБРАЗОВАНИЕТО И НАУКАТА НА РУСКАТА ФЕДЕРАЦИЯ
ДЪРЖАВНО УЧЕБНО ЗАВЕДЕНИЕ
ВИСШЕ ПРОФЕСИОНАЛНО ОБРАЗОВАНИЕ
ЛИПЕЦК ДЪРЖАВЕН ТЕХНИЧЕСКИ УНИВЕРСИТЕТ
Катедра по физика и биомедицинско инженерство
Курсова работа по темата:
«Медицински измервателни преобразуватели и електроди»
Тема: "Сензори за преместване и положение"
Завършени: студент гр. IM-09-1
Росихин А.Н.
Приема се: ст.пр. Назарова V.A.
Липецк 2011 г
Въведение
Тъй като светът на производството става все по-автоматизиран, промишлените сензори играят все по-важна роля за увеличаване на производителността и безопасността.
В продължение на две десетилетия сензорите и измервателите на пътя се използват успешно във всички индустрии: сензор за позиция, сензор за преместване. Като връзка между електронните и механичните части на устройствата, сензорът за преместване, сензорът за позиция се превърна в неразделен елемент от оборудването за автоматизиране на различни процеси.
Тази работа е посветена на безконтактни сензори, а именно индуктивни, капацитивни и оптични сензори. Всеки тип има своите силни и слаби страни, поради което в зависимост от условията и изискванията за използване на сензора се избира един или друг тип. Ще обясним какво представляват безконтактните сензори, ще говорим за техните предимства и случаи на употреба. В нашата работа обърнахме голямо внимание на капацитивния сензор. Разгледани устройства, създадени въз основа на него.
В това изследователска работапредставя информация, получена в резултат на обработката на данни от безконтактни сензори.
Целта на работата: да се изучат устройствата, принципът на работа и характеристиките на безконтактните сензори, явленията, които са в основата на тяхната работа, приложение, да се идентифицират техните предимства и недостатъци.
задача научна работае придобиване на умения за събиране и обработка на научна и техническа информация.
сензор за близост индуктивен оптичен
1. Сензор, обща информация
Сензор, сензор (от английски сензор) - терминът на системите за управление, първичен преобразувател, елемент на измервателното, сигнализиращо, регулиращо или управляващо устройство на системата, което преобразува контролираната стойност в сигнал, удобен за използване.
В момента различни сензори се използват широко при изграждането на автоматизирани системи за управление.
Сензорите са елемент технически системи, предназначени за измерване, сигнализиране, регулиране, управление на устройства или процеси. Сензорите преобразуват контролираната стойност (налягане, температура, поток, концентрация, честота, скорост, изместване, напрежение, електричествои др.) в сигнал (електрически, оптичен, пневматичен), удобен за измерване, предаване, преобразуване, съхраняване и регистриране на информация за състоянието на измервания обект.
Исторически и логично, сензорите са свързани с измервателната технология и измервателни уреди, например термометри, разходомери, барометри, индикатор за положение и т.н. Общият термин сензор стана по-силен във връзка с развитието на системите за автоматично управление, като елемент от обобщената логическа концепция сензор - управляващо устройство - изпълнителен механизъм - управление обект. Специален случай е използването на сензори в автоматични системи за запис на параметри, например в системи за научни изследвания.
Дефиниции на понятието сензор.
Има две основни широко използвани значения:
чувствителен елемент, който преобразува параметрите на средата в сигнал, подходящ за техническа употреба, обикновено електрически, въпреки че е възможно да е от различно естество, например пневматичен сигнал;
завършен продукт на базата на горния елемент, включващ в зависимост от необходимостта устройства за усилване на сигнала, линеаризация, калибриране, аналогово-цифрово преобразуване и интерфейс за интегриране в системи за управление. В този случай чувствителният елемент на самия сензор може да се нарече сензор.
Тези стойности са в съответствие с практиката за използване на термина от производителите на сензори. В първия случай сензорът е малко, обикновено монолитно електронно устройство, като термистор, фотодиод и др., което се използва за създаване на по-сложни електронни устройства. Във втория случай става въпрос за пълнофункционално устройство, свързано чрез някой от познатите интерфейси към система за автоматично управление или регистрация. Например фотодиоди в матрици и др.
В зависимост от вида на входната (измерената) величина биват:
механични сензори за преместване (линейни и ъглови),
пневматичен,
електрически,
разходомери,
сензори за скорост,
ускорение,
Температури
Натиск и др.
Има три класа сензори:
Аналогови сензори, т.е. сензори, които генерират аналогов сигнал, пропорционална на изменението на входната стойност;
Цифрови сензори, генериращи импулсна поредица или двоична дума;
Двоични (двоични) сензори, които генерират сигнал само от две нива: "включване / изключване" (с други думи, 0 или 1); са широко използвани поради своята простота.
2. Сензори за позиция
Сензорът за положение (сензор за изместване) е устройство, предназначено да определя местоположението на обект, който може да бъде в твърда или течна форма, както и да бъде гранулирано вещество.
Сензорите за положение са основните източници на информация за системите за автоматизация, както базирани на релейни или логически схеми, така и базирани на програмируеми контролери. Надеждността на цялата система се определя от надеждността на елемента, който е най-изложен на дестабилизиращи фактори.
Сензорът за положение (сензор за изместване) е два вида: безконтактен ( индуктивни сензори, магнитни, капацитивни, ултразвукови, оптични) и контактни. Основният представител на втория тип е енкодер - устройство, което преобразува ъгъла на въртене на обект в сигнал, който ви позволява да определите този ъгъл.
Според вида на изхода датчикът за положение (сензор за преместване) се разделя на аналогов, цифров и дискретен (ключове).
3. Сензори за близост
Сензорите за близост, превключвателите за близост са устройства за индустриална автоматизация, предназначени да контролират позицията на обектите. GOST 26430-85 въвежда термина "безконтактен превключвател". Впоследствие GOST R 50030.5.2-99 замени термина с "безконтактен сензор". И двата термина в момента се използват за тези продукти.
Фиг.1.1. Външен вид на сензора за близост
Безконтактният превключвател извършва превключваща операция, когато обектът на въздействие навлезе в зоната на чувствителност на превключвателя. Липсата на механичен контакт между действащия обект и чувствителния елемент на безконтактния превключвател осигурява висока надеждност на работата му.
Фиг.1.2. Превключвател за близост
Опростено, функционалната диаграма на безконтактния превключвател се състои от три блока:
Фиг.1.3. Функционална схема на безконтактния превключвател
Когато обектът на въздействие се приближи до активната повърхност на чувствителния елемент, безконтактният ключ се задейства. В този случай превключващият елемент прави или прекъсва (или изпълнява и двете операции) във веригите постоянен токдо 400 mA и във вериги променлив токдо 250 mA.
Безконтактните датчици за положение се класифицират според принципа на действие на чувствителния елемент - индуктивни, оптични, капацитивни и др.
Безконтактните превключватели са основни устройства за автоматизация на процеси в различни индустрии като напр
машиностроене,
автомобилен,
инженерство,
хранително-вкусовата промишленост и др.
Такъв широк обхват на WB се дължи на голям брой възможни технологични решения, реализирани с тяхна помощ:
преброяване на броя на обектите,
контрол на позицията на обекта,
откриване на скоростта,
определяне на ъгъла на завъртане
и още много.
3.1 Индуктивни сензори
Индуктивният сензор е безконтактен сензор, предназначен за безконтактно получаване на информация за движенията на работните органи на машини, механизми, роботи и др. и преобразуване на тази информация в електрически сигнал.
Индуктивният сензор разпознава и реагира съответно на всички проводими обекти.
Индуктивните сензори се използват широко за решаване на проблемите на системите за управление на процеси. Предлага се с нормално отворен или нормално затворен контакт.
Принципът на работа се основава на промяна на параметрите на магнитното поле, създадено от индуктора вътре в сензора.
Един от елементите на магнитната верига участва в движението, което трябва да бъде измерено, което предизвиква промяна в потока през измервателната намотка и съответния електрически сигнал.
Ако движещият се елемент е феромагнитна сърцевина, тогава неговото движение по време на транслационно движение или въртене се проявява а) в промяна на коефициента на самоиндукция на намотката (променлива индуктивност) или б) в промяна на коефициента на свързване между първична и вторична намотка на трансформатора (диференциален трансформатор), което води до промяна на вторичното напрежение.
В трансформатор с променлива връзка една намотка може да се върти спрямо друга, фиксирана (едната от тях играе ролята на източник, а другата играе ролята на приемник). Първичната намотка образува индуктор, а вторичната намотка с индуциран ток дава напрежение като функция от ъгъла на завъртане (индуктивен потенциометър, резолвер).
Зависимостта на коефициента на самоиндукция L или взаимна индукция M от изместването на намотката обикновено има посредствена линейност; неговата линейност може значително да се подобри чрез диференциално включване на две допълнителни намотки с коефициенти M и L, променящи се за дадено преместване в противоположни посоки, което осигурява частична компенсация на нелинейността.
Индуктивният сензор е свързан към верига, захранвана със синусоидален източник на напрежение, чиято честота обикновено е ограничена до няколко десетки килохерца, за да се намалят както смущенията, така и магнитните загуби и загубите, дължащи се на токове на Фуко. Измереното напрежение vm се получава чрез модулиране на амплитудата на захранващото напрежение Es cosшst чрез преместване на x(t):
vm = kx(t) Escos(wst + Ф) (1).
Понякога промените в индуктивния елемент могат да служат за модулиране на честотата на трептене пропорционално на изместването. Във всеки случай, независимо от вида на модулацията, честотата f трябва да бъде много по-ниска от носещата честота, за да се улесни откриването (f По своята същност индуктивните сензори, от една страна, са чувствителни към външни електромагнитни полета, а от друга страна, те могат сами да ги индуцират. Следователно индуктивните сензори трябва да бъдат поставени в корпус, който служи като магнитен щит. Структура Индуктивните безконтактни превключватели се състоят от следните основни компоненти: Фиг.2.1. Индуктивни превключващи устройства Генераторът създава електромагнитно поле на взаимодействие с обекта. Тригерът осигурява хистерезис при превключване и необходимата продължителност на фронтовете на управляващия сигнал. Усилвателят увеличава амплитудата на сигнала до необходимата стойност. LED индикаторът показва състоянието на превключвателя, осигурява наблюдение на производителността и бързи настройки. Съединението осигурява необходимата степен на защита срещу проникване на твърди частици и вода. Корпусът осигурява монтаж на превключвателя, предпазва от механични влияния. Изработена е от месинг или полиамид, допълнена с обков. Основни определения. 1. Активна зона. Активната зона на безконтактен индуктивен превключвател е тази област пред неговата чувствителна повърхност, където магнитното поле на чувствителния елемент на сензора е най-концентрирано. Диаметърът на тази повърхност е приблизително равен на диаметъра на сензора. Ориз. 2.2. Активна зона на сензора 2. Номинално разстояние на засичане. Фиг.2.3. Номинално разстояние на превключване Номиналното разстояние на превключване е теоретична стойност, която не отчита промените в производствените параметри на сензора, промените в температурата и захранващото напрежение. Номиналното разстояние на засичане (Sn) е основният параметър на сензора, нормализиран за даден размер при номинално захранващо напрежение и температура. Разстоянието на задействане се увеличава с нарастването на размерите на чувствителния елемент и съответно с нарастването на размерите на сензора. Съгласно GOST R 50030.5.2-99, индуктивният сензор трябва да работи в гарантиран интервал на реакция, а именно в диапазона от 0 (т.е. от повърхността на чувствителната сензорна глава) до 81% от заявеното Sn за a стандартизирана стоманена цел. Интервалът на реагиране на сензорите обективно зависи от температурата на околната среда. По правило сензорът е инсталиран така, че обектът на въздействие (подвижен структурен елемент) да се движи успоредно на чувствителната повърхност на устройството. 3. Работен клирънс. Работна междина е всяко разстояние, което осигурява надеждна работа на безконтактен превключвател в границите на приемлива температура и напрежение. Фиг.2.4. Схема на сензор с измерена междина Работен коефициент на корекция на хлабината. Коефициентът на корекция позволява да се определи работната междина, която зависи от метала, от който е направен обектът на въздействие. Има сензори с вграден дизайн (позволяващ монтаж в метал) и невграден. Във втория случай сензорите имат по-голямо разстояние на засичане. Фигурата показва зависимостта на изходния сигнал от разстоянието до диска. Фиг.2.5. Зависимост на напречния датчик за близост на изходния сигнал от разстоянието. 3.1.1. Сензор с променлива индуктивност Коефициентът на самоиндукция L на намотка от N навивки проводник зависи от магнитното съпротивление на свързаната с нея магнитна верига: L = N2/R, където R = . Тук m е магнитната пропускливост и S е площта на сечението на веригата. Ако площта на напречното сечение на различните сегменти на магнитната верига е постоянна, където lf и l0 са дължините на линиите на полето във феромагнитния материал и във въздуха, съответно, sf и s0 са площите на напречното сечение на магнитната верига и междината, mf е относителната магнитна проницаемост на феромагнитния материал (на ред от 103h104) и mo = 4p 10-7 (в системата SI). Магнитна верига с измерима междина. Въз основа на общата формула е лесно да се установи израз за коефициента на самоиндукция: Тъй като индуктивността трябва да бъде чувствителна към измерването на междината, трябва да се избере l0 » lf / mf, от което получаваме израза за L: Преместването на Dx на облицовката води до промяна на Dl0 = 2Dx на междината и индуктивността получава нова стойност: Чувствителността зависи от първоначалното положение l0 на облицовката: колкото по-високо е, толкова по-малко е l0; в този случай чувствителността може да се счита за постоянна само в случай, че преместванията са много малки в сравнение с l0. Това ограничава използването на сензори от този тип деформация от порядъка на милиметър. Чувствителността и линейността могат да бъдат подобрени чрез диференциално включване на две еднакви намотки и сърцевини, разположени симетрично по отношение на подвижната облицовка. Намотка с подвижна сърцевина. Феромагнитно ядро е свързано с част, чието положение или движение трябва да се измерва. Тази сърцевина е потопена на променлива дълбочина lf в намотка, съдържаща N навивки проводник, равномерно разпределени по дължина l (фиг. 2.6). Ориз. 2.6. Принципна диаграма на намотка с подвижна сърцевина. 1 - намотка; 2 - магнитна сърцевина. Коефициентът на самоиндукция L на намотката зависи от дълбочината на потапяне на сърцевината. Когато се изчислява L, индуктивността се разглежда като последователна комбинация от изпълнена с въздух индуктивност с дължина l0 с коефициент на самоиндукция Lo и индуктивност на желязна сърцевина с дължина lf с коефициент на самоиндукция Lf; коефициентът на взаимна индукция е равен на М. където е коефициентът на свързване, приет за постоянен. Ориз. 2.7. Диференциално задействане на две намотки с подвижно ядро. 3.2 Капацитивни сензори Капацитивен сензор, измервателен преобразувател на неелектрически величини (ниво на течност, механични сили, налягане, влажност и др.) в стойности на електрически капацитет. Структурно, капацитивният сензор е електрически плоскопаралелен или цилиндричен кондензатор. Принцип на действие на капацитивните безконтактни превключватели Капацитивните сензори имат чувствителен елемент под формата на кондензаторни плочи, разширени към активната повърхност. Принципът на работа на капацитивните сензори се основава или на промяна в геометрията на кондензатора (т.е. на промяна на разстоянието между плочите), или на промяна в капацитета поради поставянето на различни материали между плочите: електропроводими или диелектрични. Промените в капацитета обикновено се преобразуват в променлив електрически сигнал. Принципът на действие се основава на зависимостта на електрическия капацитет на кондензатора от размерите, взаимното разположение на неговите пластини и от диелектричната проницаемост на средата между тях. За плосък кондензатор с две пластини електрическият капацитет се определя от израза: където e0 е диелектричната константа; e е относителната диелектрична проницаемост на средата между плочите; S е активната площ на плочите; d е разстоянието между плочите на кондензатора. Зависимостите C(S) и C(d) се използват за преобразуване на механичните премествания в промени на капацитета. Приближаването на предмет, изработен от всякакъв материал, към активната повърхност води до промяна в капацитета на кондензатора, параметрите на генератора и в крайна сметка до превключване на превключващия елемент. Устройството и принципите на работа на капацитивния сензор Ориз. 2.8. Капацитивно сензорно устройство Капацитивният сензор за близост функционира както следва: 1. Генераторът осигурява електрическо поле за взаимодействие с обекта. 2. Демодулаторът преобразува изменението на амплитудата на високочестотните трептения на генератора в изменение на постоянно напрежение. 3. Тригерът осигурява необходимия наклон на фронта на превключващия сигнал и стойността на хистерезиса. 4. Усилвателят увеличава изходния сигнал до необходимата стойност. 5. LED индикаторът показва състоянието на превключвателя, осигурява работоспособност, бързина на настройката. 6. Съединението осигурява необходимата степен на защита срещу проникване на твърди частици и вода. 7. Корпусът осигурява монтаж на превключвателя, предпазва от механични въздействия. Изработена е от месинг или полиамид, допълнена с обков. Активната повърхност на капацитивен безконтактен сензор се формира от два метални електрода, които могат да бъдат представени като плочи на "разгънат" кондензатор. Електроди, включени във веригата обратна връзкависокочестотен автоосцилатор, конфигуриран по такъв начин, че ако няма обект близо до активната повърхност, той не генерира. При приближаване до активната повърхност на капацитивен сензор за близост, обектът влиза в електрическото поле и променя капацитета на обратната връзка. Генераторът започва да генерира трептения, чиято амплитуда се увеличава с приближаването на обекта. Амплитудата се оценява от последваща схема за обработка, която генерира изходен сигнал. Капацитивните сензори за близост се задействат както от електропроводими обекти, така и от диелектрици. При излагане на обекти, направени от електропроводими материали, действителното разстояние на усещане Sr е максимално, а когато е изложено на обекти, направени от диелектрични материали, разстоянието Sr намалява в зависимост от диелектричната константа на материала er (вижте графиката на Sr спрямо er и таблицата на диелектричната константа на материалите). Когато работите с обекти, изработени от различни материали, с различна диелектрична проницаемост, е необходимо да използвате графиката на Sr срещу er. Номиналното работно разстояние (Sn) и гарантираният интервал на експозиция (Sa), посочени в техническите данни на прекъсвачите, се отнасят за заземена метална цел (Sr=100%). Коефициент за определяне на действителното разстояние на засичане (Sr): 0,9 Sn< Sr < 1,1 Sn. Фигура 2.9 Зависимост на реалното разстояние на задействане Sr от диелектричната проницаемост на материала на обекта Еr Диелектрична константа на някои материали: Капацитивните сензори могат да бъдат еднополярни (включват само един кондензатор), диференциални (включват два кондензатора) или мостови (тук вече се използват четири кондензатора). В случай на диференциални или мостови сензори един или два кондензатора са постоянни или променливи, свързани един към друг. На практика при измерване на преместването на електропроводим обект неговата повърхност често играе ролята на кондензаторна пластина. На фиг. 2.10. Показана е принципна схема на униполярен капацитивен сензор, при който едната пластина на кондензатора е свързана към централния проводник на коаксиалния кабел, а самият обект е другата пластина. Обърнете внимание, че собствената плоча на трансдюсера е заобиколена от заземяващ екран, за да се подобри линейността и да се намалят ръбовите ефекти. Типичният капацитивен сензор работи на честоти в диапазона от 3 MHz и може да открие движенията на бързо движещи се обекти. Честотната характеристика на такъв преобразувател с интегриран електронен интерфейс е в диапазона 40 kHz. Капацитивните сензори за близост са много ефективни при работа с проводими обекти, докато измерват капацитета между електрода и самия обект. Капацитивните сензори също работят доста добре с непроводими обекти, но тяхната точност е донякъде влошена. Всеки обект, който влиза в близост до електрода, има свои собствени диелектрични свойства, които променят капацитета между електрода и тялото на сензора, което от своя страна води до изходен сигнал, пропорционален на разстоянието между обекта и детектора. Активното екраниране се използва за увеличаване на чувствителността и намаляване на ръбовите ефекти в еднополюсен капацитивен сензор. В този случай екранът се поставя около неработещите страни на електрода и към него се подава напрежение, равно на напрежението на електрода. Тъй като напреженията на екрана и електрода имат еднаква амплитуда и фаза, между тях няма електрическо поле и всички компоненти, разположени зад екрана, нямат никакво влияние върху работата на сензора. Този метод на екраниране е илюстриран на фиг. 2.11. Фиг.2.10. Капацитивен сензор с екраниращ пръстен, напречно сечение Ориз. 2.11. Капацитивен сензор за разстояние до обект с активен щит около електрода През последните години мостовите капацитивни сензори за изместване станаха много популярни. На фиг. 2.12. показва се линеен мостов капацитивен сензор за изместване, състоящ се от две групи плоски електроди, разположени успоредно на фиксирано разстояние d. За да се увеличи капацитетът, разстоянието между електродите е достатъчно малко. Стационарната група електроди се състои от четири правоъгълни елемента, а подвижната група се състои от два. И шестте елемента имат еднакви размери. За да се увеличи диапазонът на линейност, е желателно да се направи размерът на всеки елемент възможно най-голям (тук, като правило, ограниченията на механичната якост започват да се отразяват). Четирите електрода на стационарната подгрупа са кръстосано свързани помежду си с електрически проводници, което се прави, за да образуват капацитивна мостова верига. Към мостовата верига се прилага синусоидално напрежение с честота 5 - 50 kHz. Диференциалният усилвател усилва разликата в напрежението между двойка електроди в движеща се група. Изходният сигнал на усилвателя се подава на входа на синхронния детектор. Капацитет на кондензатора. Капацитивен сензор тип мост с две успоредни плочи: A - подреждане на групи, B - еквивалентна схема на номиналното разстояние една от друга, пропорционална на площта на частта от подвижната плоча, разположена срещу съответната област на стационарна плоча. На фиг. 2.12. показана е еквивалентната схема на енкодер на изместване с конфигурация на капацитивен мост. Капацитивните сензори за преместване имат широк спектър от приложения. Те могат да се използват както самостоятелно за определяне на положението и движението на обекти, така и да бъдат част от други сензори, при които движенията на отделни елементи се предизвикват от действието върху тях на различни сили, налягане, температура и др. Фиг. 2.12. Мостов капацитивен сензор. 3.3 Оптичен сензор (фотоелектрически сензор) Фотосензорът е устройство, което регистрира и реагира на промените в интензитета на светлинния поток. Има аналогови и дискретни оптични сензори. При аналоговите сензори изходният сигнал се променя пропорционално на околната светлина. Основната област на приложение са автоматизирани системи за управление на осветлението. Дискретните сензори променят изходното състояние в обратното, когато се достигне предварително определена стойност на осветеност. След механичните контактни и потенциометричните сензори, оптичните детектори са може би най-популярните устройства за определяне на позицията и движението на обекти. Съставът на оптичен сензор за изместване като правило включва три компонента: източник на светлина, фотодетектор и устройства, които контролират светлината (лещи, огледала, оптични влакна и др.). Ориз. 3.1. Оптично сензорно устройство. С използването на защитни екрани или охлаждане, оптичните сензори се използват за позициониране или преброяване на нагрети обекти. В съответствие с GOST R 50030.5.2 оптичните безконтактни превключватели се класифицират в три групи: тип Т - с приемане на директен лъч от излъчвателя; тип R - с приемане на лъча, върнат от рефлектора; тип D - с приемане на лъч, дифузно отразен от обект. Оптичен сензор тип Т се характеризира с това, че излъчвателят и приемникът са поставени в отделни корпуси. Директният оптичен лъч преминава от излъчвателя към приемника и може да бъде блокиран от обекта на въздействие. Излъчвателят и приемникът могат да получават енергия от различни източници на енергия. Емитерният индикатор сигнализира захранващото напрежение. Индикаторът на приемника сигнализира, когато приемникът се задейства. Превключващият елемент се намира в приемника. Оптичният сензор тип R има излъчвател и приемник, разположени в един корпус. Приемникът получава излъчващия лъч, отразен от специален рефлектор Оптичният сензор тип D има излъчвател и приемник, поставени в един корпус. Приемникът получава лъч, дифузно отразен от целта. Обектът може да се движи както по дължината на относителната ос, така и под ъгъл спрямо нея 3.3.1 Абсолютни цифрови енкодери Това са релси за линейни движения или дискове за ъглови движения, разделени на N равни области (ленти при релса, сектори при диск), върху които се записват двоични думи, съответстващи на позицията, която се определя според код и специфична технология. Броят на местата N определя разделителната способност, както следва: L/N cm за релса с дължина L cm и 360°/N за диск. Всички n бита, които съставят всяка от думите, се материализират на n паралелни (за железопътен транспорт) или концентрични (за диск) коловози (фиг.), като се използват две различни физически състояния за определяне на стойностите 0 или 1: а) немагнитизираща се или феромагнитна повърхност (магнитно отчитане); б) изолираща или проводима повърхност (електрически сензор); в) непрозрачна и полупрозрачна повърхност (оптично отчитане). В момента оптичното четене е най-често използваното; за всяка писта има източник - електролуминесцентен диод и приемник - фототранзистор. Ориз. 3.3. Рейк и диск с естествен двоичен код. Ориз. 3.3. Релса и диск с код на Грей. 4. Сензори за близост Сензорите от този тип нямат механична връзка между устройството и движещия се обект; взаимодействието между тях - функция на тяхното взаимно положение - се установява с помощта на поле, което може да служи като: магнитно индукционно поле за сензори с променливо магнитно съпротивление (използва се ефектът на Хол); електромагнитно поле за сензори с токове на Фуко; електромагнитно поле за капацитивни сензори. Предимствата на сензорите за близост произтичат от факта, че няма такава механична връзка. Те включват: широка честотна лента; ниско въздействие върху измервателния обект поради изключително малките сили, които възникват между този обект и сензора. Повишена надеждност поради липсата на движещи се части, подложени на износване или увеличени хлабини. Освен това тези сензори осигуряват галванична изолация на измервателната верига и движещия се обект. Основните им недостатъци са: малък, около 1 mm, обхват на измерване; нелинейност; зависимостта на показанията на някои от тях от формата, размерите и материала на обекта и околната среда, което води до необходимостта от тяхното калибриране при специфични условия на приложение. Сензорът за близост се използва в аналогов режим или в режим на цифров код. В първия случай амплитудата на сигнала е непрекъсната функция на относителната позиция на обекта и сензора, а във втория случай нивото на сигнала може да бъде само високо или ниско в зависимост от това дали обектът е по-близо или по-далеч от определено разстояние: в последния случай сензорът се нарича детектор на близост. С това използване на сензора определете: номинален обхват - разстоянието, приближавайки се до оста на сензора, стандартният обект предизвиква промяна в кодовите състояния на изхода на сензора; диференциален или хистерезис - разликата в разстоянията, съответстващи на промените в кодовите състояния, в зависимост от това дали стандартният обект се приближава или отдалечава по оста на сензора. Някои възможни приложения са показани на фиг. 4.1 те включват: измерване и стабилизиране на позицията; контрол на размера; изследване на движението на обекти с ниска инерция. Ориз. 4.1. Сензор за близост. а - позиции; b - корекции; c - корекции в две координати; g - диаметър; д - надлъжни и напречни движения; e е дебелината на масления филм; g - дебелината на изолацията върху метала; h - дебелина на метала; и - размер; k, l - динамични премествания, m - статични премествания. 4.1 Индуктивен сензор с променливо магнитно съпротивление Такъв сензор е трансформатор, чиято магнитна верига включва движещ се обект (фиг. 4.2); този трансформатор трябва да е феромагнитен или да има феромагнитна повърхност. Ориз. 4.2. Сензор за близост с променливо магнитно съпротивление. 1 - магнитен екран; 2 - вторична намотка; 3 - феромагнитна повърхност; 4 - първична намотка. Разстоянието между обекта и сензорната глава, действащо като празнина, определя съпротивлението на магнитната верига и следователно потока, преминаващ през вторичната обмотка и напрежението на нейните клеми, когато първичната е под напрежение. Напрежението на вторичната намотка, което е измервателният сигнал vm, се променя нелинейно по закона, записан във формата където x е разстоянието на сензора от обекта, а vmo и a зависят по-специално от магнитната проницаемост, формата и размерите на обекта. Сигналът може да бъде линеаризиран за малки премествания спрямо дадена позиция Направете, ако два еднакви сензора са свързани от противоположните страни на движещия се обект, включени според диференциална верига: първичните намотки се захранват последователно или паралелно, а вторичните напреженията vm1 и vm2 са свързани в противоположни посоки; измереното напрежение в този случай е равно на 4.2 Индуктивен сензор с токове на Фуко Основният елемент на този тип сензор е бобина, захранвана с висока честота, която индуцира променливо магнитно поле в пространството около себе си. Токове на Фуко възникват в метален предмет, поставен в тази зона. Според закона на Ленц те се стремят да компенсират причината, която ги е причинила; по този начин те предизвикват индукция, противоположна по знак на индукцията на намотката, което води до намаляване на нейния коефициент на самоиндукция. За разлика от сензорите с променливо магнитно съпротивление, които са подходящи само за феромагнитни обекти, сензор с токове на Фуко е чувствителен към всеки метален предмет. Неговите показания обаче зависят не само от разстоянието до обекта, но и от неговите физически свойства (съпротивление, пропускливост) и геометрични характеристики (форма и размер). Обикновено обектът и сензорът се поставят във въздуха; Устройството може да се използва и в диелектрични среди, които се характеризират с ниски загуби при работни честоти. Ориз. 4.3. Индуктивно свързване на намотка и проводящ обект. Съответна опростена електрическа схема. 1 - обект; 2 - вълнуваща намотка. Елементарна физическа теория. Опростена теория за работата на този тип сензор може да бъде описана чрез оприличаване на метален предмет на верига с групирани постоянни елементи, свързани към намотка чрез взаимна индукция (фиг. 4.3). Бобината и нейното захранване, които образуват първичната верига, се описват с уравнението а обектът (вторична верига) - по уравнението Влияние на свойствата на обекта. Съпротивление. Връзката с обекта засяга първичната индуктивност толкова по-малко, колкото по-високо е съпротивлението на обекта, т.е. толкова по-ниска е проводимостта на материала, от който е съставен. В този случай чувствителността на инструмента може да се подобри чрез нанасяне на високопроводим лист или покритие, като алуминий, върху движещия се обект. Магнитна пропускливост. Ако феромагнитен обект се доближи до намотката, тогава в него ще възникнат два противоположни ефекта: намаляването на съпротивлението на магнитната верига води до увеличаване на индуктивността, докато токовете на Фуко го причиняват намаляване. Получената посока на промяна на индуктивността зависи от съотношението на стойностите на пропускливостта и съпротивлението на обекта. Размери. Предполага се, че почти целият набор от токове на Фуко е локализиран в повърхностния слой, чиято дебелина е приблизително три пъти по-голяма от кожния слой q, изразът за който има формата където m и y са съответно магнитната проницаемост и електрическата проводимост на обекта, f е честотата на индуциращото поле на намотката. Така при честота от 1 MHz имаме q? 80 микрона за алуминий и d? 20 µm за стомана. Реакцията на сензора не зависи от дебелината на обекта, ако е повече от 3 пъти дебелината на кожния слой. Напречните размери на обекта също имат малък ефект, ако са по-големи от диаметъра на намотката. Схема за измерване. Аналогов сензор. Обикновено втора индуктивност, разположена в съседния крак на моста, ще бъде диференцирано свързана с измервателната индуктивност, за да се компенсират произволни влияния. Втората индуктивност може да бъде: еталонна индуктивност, разположена до модел на неподвижен обект от същото естество като движещия се обект (измереният сигнал в този случай е нелинейна функция на изместването); променлива индуктивност, разположена спрямо обекта по такъв начин, че движенията на този обект водят до противоположни промени в двете индуктивности (този диференциален метод на превключване позволява линеаризиране на характеристиката на сензора в ограничена област на премествания). детектор за близост. Когато е достатъчно да се знае за позицията на даден обект само дали разстоянието до обекта е по-голямо или по-малко от дадено, индуктивността обикновено се поставя във веригата на резонансната верига на генератора. Приближаването на обекта предизвиква увеличаване на загубите и намаляване на индуктивността, в резултат на което добротността Q на веригата на натоварване намалява. Под определена минимална стойност на Q, съответстваща на прага, генерирането спира; съответната верига открива това и сигнализира за наличие или липса на генериране. 4.3 Сензор за ефект на Хол Ефектът на Хол се изразява в появата на потенциална разлика VH перпендикулярно на токовите линии на проводник, поставен в индукционното поле B; напрежението на Хол VH зависи от посоката и големината на V. Ефектът на Хол е следствие от силата на Лаплас, която действа върху движещи се електрически заряди. Сензор, базиран на ефекта на Хол, образува сонда под формата на плоча (обикновено полупроводникова), през която преминава ток и по краищата на която се измерва напрежението на Хол, и магнит, който създава индукционно поле B, чиято стойност в областта на сондата (както напрежението VH) зависи от позицията на магнита. Един от елементите - сонда или магнит - е фиксиран, а другият е свързан с движещ се обект; обикновено, за да се избегнат проблеми с електрическата комуникация с мобилни източници на сигнали с ниско ниво, сондата е фиксирана; в този случай, за да не се нарушава движението на обекта, масата на магнита трябва да е относително малка, което ограничава областта, в която индукцията е измерима, и по този начин намалява обхвата на измерване. Елементарна физична теория на ефекта на Хол. Да разгледаме проводяща правоъгълна плоча (дължина L, ширина l, дебелина e) с приложена към нея потенциална разлика V, предизвикваща ток I в надлъжна посока (фиг. 4.4). Ориз. 4.4. Принципна диаграма на сонда, базирана на ефекта на Хол. Ако приемем, че проводимостта се осигурява от електрони с концентрация n и подвижност m, имаме: Тук c е съпротивлението, c = 1/qmn (q = 1,6 10-19 C), V = ExL, Ex е надлъжното електрическо поле, откъдето I = qmnExel. Плочата се поставя в индукционно поле B с нормална компонента към равнината на плочата BN; силата на Лаплас FL, действаща върху електрон, движещ се със скорост v, е равна на FL = -qvB, където v = -mEx. Тази сила е насочена в посока на увеличаване на y и има стойност Под действието на силата FL електроните се натрупват върху страничната повърхност на плочата от страната на увеличаване на y, оставяйки същия заряд с противоположния знак на противоположната страна; тези заряди създават електрическо поле Ey, успоредно на оста y, насочено в посока на увеличаване на y и действащо върху всеки електрон със сила Fy = -qEy. Състояние на равновесие се достига, когато двете сили са балансирани: Напрежението на Хол VH съответства на произведението от ширината на плочата: или, като се има предвид намереният по-рано израз за тока I, Тук KH = -1/qn е константата на Хол. Една по-строга теория, която взема предвид разсейването на мобилните заряди от фонони, води до умножаване на предишния KH израз с 3p/8. Редът на големината за някои типични материали за сензори на Хол е даден в таблицата: Числен пример. В плоча с дебелина 0,1 mm, изработена от индиев арсенид със съпротивление 5·10-5 Ohm·m, захранвана с ток 1 mA и поставена в нормално индукционно поле с напрежение 104 Gs, напрежение на Хол се появява 3,8 mV. Константата на Хол зависи от температурата поради нейното влияние върху плътността на свободните носители; температурната чувствителност (1/KN) (d KN/dT) варира в зависимост от материала в широк диапазон и може да достигне няколко % за 1°C. Промяната в KN като функция на стойността на B може да доведе до отклонение от линейността от порядъка на няколко% от обхвата на измерване; знакът на тази нелинейност зависи от материала. Дизайн на сензора. Измерената величина, към която сензорът с ефект на Хол е пряко чувствителен, е нормалният компонент BN на магнитната индукция; съответната чувствителност е Чувствителността е пропорционална на тока I, преминаващ през сондата; зависи от дизайна на сондата (дебелина e и избор на материал според коефициента KH). Когато сензор се използва за откриване на позиции или премествания, индукционният магнит действа като междинен преобразувател, който се въздейства от първичната измервана величина (позиция или изместване), за да промени вторичната измервана величина, към която сензорът е пряко чувствителен. Позиционната чувствителност Sx се дава от Позиционната чувствителност Sx е пропорционална по-специално на градиента на нормалния компонент на индукцията в областта на изместване. Този градиент зависи от природата на магнита и от неговата позиция спрямо сондата; обикновено има значителна стойност и е повече или по-малко постоянна само в много ограничена област (от порядъка на 1 mm). Критерий за избор на материал. Напрежението на Хол е пропорционално на тока I, но този ток е ограничен от нагряването на Джаул, което генерира, което е пропорционално на разсейваната мощност Pd: Във функцията Pd напрежението на Хол се изразява, както следва: Ако измерването се извършва с устройство с голямо входно съпротивление и мощността на разсейване е настроена да осигурява нагряване в ограничени граници, е необходимо да се избере материал, за който членът /n е максимален. Например, ако измерването се отнася до мощността, разсейвана от генератора на Хол при съгласувано съпротивление, тогава максималната трябва да бъде стойността. детектор за близост. Реализира се чрез прикрепване на Schmitt тригер към сондата на Хол, която е компаратор на нивото на хистерезис, който позволява (BN + и BN-) в зависимост от това дали се променя съответно нагоре или надолу (фиг. 4.5). Обикновено хистерезисът на DBN е от порядъка на няколко десетки mT и тъй като е по-висок от обичайните фонови индукции, прави възможно избягването на фалшиви аларми, които могат да бъдат причинени от тези индукции. Ориз. 4.5. Детектор за близост с ефект на Хол и характеризиране на взаимодействието. 5. Предимства и недостатъци на сензорите 5.1 Индуктивен сензор Предимства без механично износване, без контактни повреди без отскачане на контакт и фалшиви положителни резултати висока честота на превключване до 3000 Hz устойчиви на механични натоварвания Недостатъци - относително ниска чувствителност, зависимостта на индуктивното съпротивление от честотата на захранващото напрежение, значителна обратна връзка на сензора върху измерената стойност (поради привличането на арматурата към сърцевината). 5.2 Капацитивен сензор Предимствата на капацитивните сензори са простота, висока чувствителност и ниска инерция. Недостатъци - влиянието на външни електрически полета, относителната сложност на измервателните устройства. 5.3 Оптичен сензор Предимства - поради големите разстояния на засичане (до 50 m), оптичните сензори за близост са широко използвани в индустрията и извън нея. 5.4 Ултразвукови сензори Те позволяват безконтактен контрол на позицията и размера на различни обекти, независимо от техните оптични и електрически свойства, широко се използват в технологично оборудване за измерване на нивото на пълнене на резервоари с течности и насипни материали, контрол на диаметъра на навиване на листа материали и решаване на други проблеми. Специализирани ултразвукови сензори ви позволяват да определите позицията на ръба и дебелината на прозрачни полимерни филми, тъкани, хартия. Работата на ултразвуковите сензори се основава на пиезоелектричния ефект - промяна в геометричните размери на керамична или кварцова плоча, когато върху нея се прилага електрическо поле и появата на електрическо поле върху повърхността на плочата при механични въздействия върху нея . Вибрациите на плочата с честотата на приложеното електрическо поле (300 kHz) предизвикват появата на звукови вълни със същата честота. Тези вълни се разпространяват във въздуха със скорост 330 m/s. Те, като ехо, се отразяват от обекти и се връщат към излъчвателя. Действайки върху плочата, звуковите вълни предизвикват появата на електрическо поле върху нея. Така плочата работи първо като излъчвател, а след това като приемник на ултразвукови вълни. Обхватът на реакция на сензора се регулира чрез промяна на мощността на излъчване на тези вълни и интервала от време, когато сензорът чака отражение. 5.5 Сензор за ефект на Хол Възможност за измерване на позиция или движение през неферомагнитен щит, разделящ сондата от обект, носещ магнит. 6. Приложение на сензори Използването на сензори за позиция и преместване в индустрията е разнообразно. По-специално в медицината безконтактните сензори могат да бъдат намерени в устройства като гама камера, флуорограф, ЯМР, ултразвук и литотриптер. 6.1 Индуктивни сензори Индуктивните сензори се използват за безконтактно получаване на информация за движенията на работните органи на машини, механизми, роботи и др. и преобразуване на тази информация в електрически сигнал. Монтират се на CNC машини, преси, машини за шприцване, конвейерни линии, автоматични клапани, опаковъчни машини и др. 6.2 Капацитивни сензори Капацитивните сензори се използват за измерване на ъглови премествания, много малки линейни премествания, вибрации, скорости на движение и др., както и за възпроизвеждане на определени функции (хармонични, зъбни, правоъгълни и др.). Капацитивните преобразуватели, чиято диелектрична константа e се променя поради движение, деформация или промени в състава на диелектрика, се използват като сензори за ниво на непроводими течности, насипни и прахообразни материали, дебелината на слой от непроводими материали , както и следене на влажността и състава на веществото. 6.3 Оптични сензори Оптичните сензори се използват във всички индустрии за позициониране или преброяване на обекти. Фотосензорите са повсеместни и се използват в ежедневието ни. Помагат, контролират процеса на отваряне и затваряне на гаражна врата, безконтактно пускане и изключване на водата в мивката, управление на движението на ескалатора, отваряне на вратите в супермаркет, фотофиниш. 6.4 Ултразвуков сензор контрол на задръстването сензор за присъствие сензор за близост за роботика контрол на празното чекмедже контрол на качеството на конвейера контрол на наличието на тави контрол на скъсване на конец / тел и др. контрол на пълненето проверка на диаметъра на ролката сензор за присъствие позициониране на автомобила (сензор за близост) Заключение В научната работа бяха разгледани основните видове безконтактни сензори, характеристиките и принципите на тяхната работа и обхвата на тяхното приложение. Може да се обобщи, че безконтактните превключватели са основните устройства за автоматизиране на процеса на различни индустрии, като напр. машиностроене, автомобилен, нефтохимическа промишленост, инженерство, хранително-вкусовата промишленост и др. Такъв широк обхват на WB се дължи на голям брой възможни технологични решения, реализирани с тяхна помощ: преброяване на броя на обектите, контрол на позицията на обекта, регистрация на наличието или отсъствието на обект, избор на обекти според техните размери, цвят и други физически свойства, откриване на скоростта, определяне на ъгъла на завъртане и още много Предимства на безконтактните превключватели: висока надеждност; еднозначна зависимост на изходната стойност от входната; стабилност на характеристиките във времето; малък размер и тегло; няма обратна връзка за обекта; работят при различни работни условия. Библиография 1. Списание "Модерна електроника" № 6, 2006 г 2. Уебсайт www.sensor-com.ru 3. Уебсайт www.datchikisensor.ru 4. Mil G. Електронно дистанционно управление на модели. - М.: 1980 г. 5. Пепел. J. et al.- Сензори на измервателни системи - М.: 1992г. 6. Списание "Компоненти и технологии" № 1, 2005 г., статия на Александър Криворученко "Безконтактни сензори за положение. Проблеми на избора и практика на приложение” 2005г 7. Сайт ru.wikipedia.org Хоствано на Allbest.ru Конструкцията и принципът на работа на сензори за преместване от различни видове: капацитивни, оптични, индуктивни, вихрови токове, ултразвукови, магниторезистивни, магнитострикционни, потенциометрични, базирани на ефекта на Хол. Области на използване на устройствата. резюме, добавено на 06/06/2015 Концепцията и общите свойства на сензорите. Разглеждане на характеристиките на работата на сензорите за скорост и ускорение. Характеристика на оптични, електрически, магнитни и радиационни методи за измерване. Анализ на реални оптични сензори, сензори за скорост и ускорение. курсова работа, добавена на 14.01.2016 г Принципът на ефекта на Фарадей в работата на фиброоптични сензори за ток. Разработване и изследване на микроструктурни оптични влакна. Сравнение на оптичен сензор и токов трансформатор. Потенциални приложения за оптични сензори за ток. резюме, добавено на 12.11.2015 г Структурна схема, характеристики и режими на работа на микросхемата на преобразувателя на Angle-Code за обработка на сигнали от индуктивни сензори от типа SKVT (синус-косинусови въртящи се трансформатори). Сравнението му с чужди аналози и модули, базирани на тях. статия, добавена на 28.01.2015 г Дефиниране на концепцията за терморезистивни сензори. Общи характеристики на резистивните температурни детектори. Изчисляване на коефициента на съпротивление (полупроводник или проводник), режими на работа на устройството. Разглеждане на използването на термистори. резюме, добавено на 01/12/2016 Фотоелектрични сензори за положение, характеристики, обхват, принцип на тяхното действие. Ултразвукови измервателни уреди с цифрови и аналогови изходи, техните предимства. Индуктивни сензори за положение и преместване, принцип на измерване, схема на свързване. курсова работа, добавена на 25.04.2014 г Сензорът е елемент на управляващо устройство, първичен преобразувател на контролирана стойност в удобен сигнал: принцип на работа, схеми за свързване към микроконтролер (MK). Обща характеристика на капацитивни сензори със звуков индикатор, изчисляване на параметри. курсова работа, добавена на 12/04/2011 Определяне на принципа на работа на капацитивния сензор за присъствие. Схеми за включване на сензори за въвеждане на капацитет към MK. Технически характеристики и устройство на електрическата верига на уреда със звуков индикатор. Приложение на охранителни детектори за ПИК помещения. курсова работа, добавена на 23.09.2011 г Проектиране на изчислителен модул, състоящ се от 2 сензора за налягане и 4 сензора за температура (до +125 и до +400). Изготвяне на електрическа схема за сензори. Писане на демонстрационни програми за работа с устройства DS18B20, АЦП DS2450 и MPX2010. курсова работа, добавена на 24.12.2010 г Обща схема на капацитивен датчик за ниво. Радарни нивомери, области на тяхното приложение. Вертикален монтаж на сензори. Принципът на работа на ротационен превключвател за ниво. Вибриращ сензор за ниво. Методи за инсталиране на ротационни сензори.Подобни документи