Назначаване на асинхронен електродвигател. Асинхронни двигатели
Асинхронни двигатели се наричат двигатели, при които скоростта на ротора изостава от скоростта на магнитното поле на статора, когато трифазен ток преминава през намотките му.
Когато трифазен ток преминава през намотките на статора на трифазна машина, възниква въртящо се магнитно поле, под въздействието на което електричество. В резултат на взаимодействието на въртящите се магнитно полестатор с токове, индуцирани в проводниците на ротора, възниква механична сила, която действа върху проводника с ток, което създава въртящ момент, който привежда ротора в движение. В същото време скоростта на ротора на асинхронен двигател винаги е по-малка от скоростта на въртящото се магнитно поле на статора поради приплъзване на ротора, което за съвременните двигатели е приблизително 2-5%.
По този начин асинхронният двигател получава енергия, доставена към ротора чрез въртящ се магнитен поток (индуктивно), за разлика от двигателите постоянен ток, при които енергията се доставя чрез проводници. Асинхронни двигателиза разлика от синхронните, те се възбуждат от променлив ток.
Асинхронният двигател, подобно на синхронния двигател, се състои от две основни части: статор с фазови намотки, през които преминава трифазен променлив ток, и ротор, чиято ос е положена в лагери. Роторът може да бъде късо съединение и фаза (фиг. 170).
Ротор с катерица (фиг. 170, в)представлява цилиндър, по обиколката на който са разположени проводници, успоредни на неговата ос, затворени един към друг от двете страни на ротора с пръстени (под формата на колело на катерица).
Асинхронен двигател с такъв ротор се нарича двигател с катерица. Неговите недостатъци включват: нисък начален въртящ момент и голям ток в намотките на статора по време на стартиране. Ако искат да увеличат стартовия момент или да намалят стартовия ток, те използват асинхронни двигатели с фазов ротор (фиг. 170, Ж).Тези двигатели имат същата намотка на ротора, както и на статора. В този случай краищата на намотките са свързани към контактни пръстени (фиг. 170, д)разположен на вала на двигателя. Контактните пръстени са свързани към стартовия реостат с помощта на четки.
За стартиране на двигателя в захранващата верига е включен статор, след което съпротивлението на стартовия реостат постепенно се отстранява от веригата на ротора. При стартиране на двигателя контактните пръстени са късо съединени от контактите на стартера,
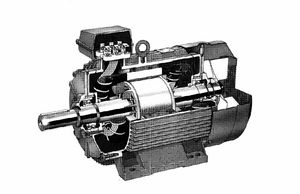
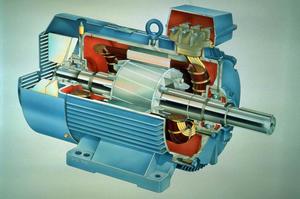
Разкроена по дължина асинхронен двигателс фазов ротор
На фиг. 171 показва надлъжен разрез на асинхронен двигател с фазов ротор. В случай 6 статорна намотка 5 е поставена, положена в жлебове 4 статорна стомана. в жлебове 2 стоманен ротор лежи намотка 3 ротор.
Стартиране на двигателя с ротор с катерицаможе да се извърши чрез директно включване на стартера до пълно работно напрежениевериги (метод на директен старт). Въпреки това, поради рязко увеличение на индуцирания e. д.с. и стартов токнапрежението в целта в началния момент намалява, което се отразява неблагоприятно на работата на задвижващия двигател и други консуматори, захранвани от тази верига.
В случай на голям стартов ток, за да го намалите, асинхронните двигатели с ротор с катерица обикновено се стартират по два начина: чрез превключване на намотките на статора по време на стартиране от звезда към триъгълник, ако намотките на статора са свързани в триъгълник по време на нормална работа на електродвигателя или чрез включване на електродвигателя чрез стартов реостат (или автотрансформатор) в статорни вериги.
Двигателят се спира чрез изключване на контактора. След спиране на двигателя пусковият реостат или автотрансформаторът е напълно включен. Скоростта на въртене на асинхронните двигатели се регулира чрез промяна на съпротивлението на реостата, включен в роторната верига (за електродвигатели с фазов ротор), и превключване на намотките на статора за промяна на броя на двойките полюси (за електродвигатели с катерица -клетъчен ротор).
Обръщането на посоката на въртене на асинхронните двигатели се постига чрез промяна на посоката на въртящото се магнитно поле на статора чрез превключване на кои да е две от трите фази на намотката на статора (използвайки проводници, свързващи скобите на намотката на статора към веригата) с помощта на конвенционален двуполюсен превключвател.
Асинхронните двигатели са прости по конструкция, имат по-малки размери и тегло в сравнение с постояннотоковите двигатели, в резултат на което са много по-евтини. В допълнение, те са по-надеждни при работа, изискват по-малко внимание по време на поддръжка поради липсата на въртящ се колектор и четка; те имат по-висока ефективност, тяхното контролно оборудване е много по-просто и по-евтино от това на двигателите с постоянен ток. Асинхронните двигатели работят без искрене, което е възможно при машини с постоянен ток с нарушено превключване, така че те са по-безопасни от гледна точка на пожар.
Изброените основни предимства на асинхронните двигатели обясняват модерна тенденцияшироко разпространено въвеждане променлив токна морски кораби. Трябва да се отбележи, че в промишлеността асинхронните двигатели отдавна са спечелили доминираща позиция в сравнение с други видове електродвигатели.
Асинхронните двигатели са изградени с мощност от части от киловат до много хиляди киловати. На кораби военноморски флотосновно се използват асинхронни двигатели с катерица, които се предлагат във водоустойчив и водоустойчив вариант и са с номинално напрежение 380/220 V.
1. Какъв е принципът на DC генератора?
2. Кои са основните части на електрическата машина за постоянен ток и какво е тяхното предназначение?
3. Как се разделят машините за постоянен ток по дизайн?
4. Какъв е принципът на работа на DC двигателя?
5. Какви са основните правила за обслужване електрически машинипостоянен ток?
6. Какви машини се наричат синхронни и какъв е принципът на тяхното действие?
7. За какво са предназначени трансформаторите, каква е тяхната конструкция и принцип на действие?
8. Какви двигатели се наричат асинхронни и какъв е принципът на тяхното действие?
9. Как се разделят асинхронните двигатели според конструкцията на ротора?
Най-популярният от съществуващите електродвигатели все още е асинхронният двигател, създаден още през 19 век. Дизайнът му се оказа гениално прост и толкова успешен, че всички по-нататъшни трансформации не засягаха принципа на работа, засягайки само технологията на производство на определени части. Например, лагерите, върху които е закрепен валът на двигателя, могат да бъдат модифицирани, формата на намотките на ротора и статора се променя, но принципът на работа на асинхронния двигател остава същият.
Независимо от размерите на този тип електродвигател, устройството му ще бъде същото. По-лесно е да се разглежда като пример трифазен електродвигател. Такива двигатели работят във фабрични подове - на конвейера и в машинни инструменти, задвижват асансьорната кабина - в къщи и мини, изпомпват вода чрез завъртане на турбината на помпата - както в малък кладенец, така и в мощни водоприемни станции. Обхват на приложение, обхват на прилагане трифазни устройстваширок.
Различни видове двигатели
За разлика от трифазния, еднофазният асинхронен двигател често се използва в домакински уреди - прахосмукачки, перални машини, вентилатори, кухненски роботи, блендери и др. Използват се и в касетофони и плейъри на винилови дискове. Дори като част от персонален компютър можете да намерите повече от един асинхронен двигател. Но ние ще се върнем към устройството на тази версия на двигателя малко по-късно.
Първият, който се роди, беше трифазен електродвигател, чийто принцип на работа беше построен върху взаимодействието на електромагнитните полета. Основните части на асинхронния двигател са статорът и роторът. Съответно частта, която остава неподвижна, се нарича статор. Именно тя се намира директно под външната обвивка на устройството и има формата на цилиндър. В тази част три намотки са разположени в кръг - под ъгъл от 120 ° една спрямо друга.
В съвременните двигатели могат да се преброят много намотки, но те са свързани помежду си, така че всяка следваща се различава от предишната по фаза, а фазовото изместване между съседните намотки е 120 °. Намотките са навити Меден проводник, като към всяка от групите е включено напрежение от неговата фаза. По този начин се оказва, че магнитното поле се движи по тези намотки, сякаш се затваря в пръстен.
Статорът също има свои собствени намотки. Тъй като електричеството не се доставя на статора, той има право затворен проводник, който понякога се оформя под формата на така наречената клетка на катерица вместо намотки. За да бъдем по-точни, този детайл не прилича на самата клетка за пъргав гризач, а на колело на катерица, предназначено животното да изпръска неудържимата си енергия. В ротора на устройството "катерица" се формира чрез изливане на разтопен алуминий в жлебовете на сърцевината, изработена от типизирани стоманени листове. Такова устройство се нарича ротор с катерица.
Ако статорът е направен с истински намотки, тогава той обикновено се прави многополюсен. Такъв ротор се нарича фазов ротор. Намотките на този ротор са затворени със звезда или триъгълник.
Роторът има собствен вал, който се поддържа от задни и предни лагери. Те от своя страна прикрепени към корпуса на двигателятака че роторът вътре в статора да може да се върти свободно. Принципът на работа на асинхронните двигатели се основава на факта, че в намотките или „колелото на катерица“ от статора се индуцира магнитно поле. Под действието му в проводниците на ротора се появява ток, а с него и собственото му магнитно поле.
Променливото магнитно поле на статора дърпа ротора заедно с него и той започва да се върти. Но магнитното поле на ротора винаги изостава спрямо полето на статора и въртенето на двете полета не може да се случи синхронно. Това принуждава ротора да преодолее много сили, действащи върху него:
- гравитационна сила;
- триене при търкаляне (ако се използва сачмен или ролков лагер);
- триене при плъзгане (ако като лагер се използва бронзова втулка);
- силата на реакция на задвижваното оборудване.
Последната сила зависи от много моменти, така че не може да бъде сведена до някакъв прост физически параметър. Ако трябва да преместите трамвая, тогава двигателят трябва да поеме натоварване на предавката, който трябва да се развърти, от самата кола, която трябва да се премести, освен това не трябва да се забравя за силата на триене при търкаляне, която изпитват колелата на превозното средство.
В случая, когато има описание на работата на професионална месомелачка, която се задвижва от асинхронен двигател, тогава тук се преодолява съпротивлението на самата скоростна кутия и това парче месо или дори кост, което трябва да се смила .
Тъй като между статора и ротора има празнина, роторът под товар просто изостава от статора по отношение на ъгловата скорост. Следователно скоростта на ротора зависи от натоварването на вала на двигателя. Принципът на синхронизма е нарушен, откъдето идва и името на самото устройство: „асинхронен двигател“.
Принципът на работа е заложен в асинхронния двигател дава редица предимстватова устройство:
Недостатъци на асинхронните двигатели
Електрическите двигатели с този дизайн също имат своите недостатъци. Те включват топлинни загуби. Те наистина може да прегрееособено при натоварване. За да направите това, кутиите им често се правят оребрени - така че да излъчват по-добре топлина в околното пространство. Също така, асинхронно устройство често е оборудвано с вентилатор, разположен на същия вал, за да издуха ротора, тъй като корпусът може да отстрани топлината само от статора, тъй като между тях няма въздушна междина, което не може да се каже за ротора.
Невъзможността да се поддържа стабилна скоростта на въртене прави асинхронния двигател неприложим в някои устройства.
Свързване на монофазен двигател
 В нашите домакински уреди най-често можете да намерите същото асинхронно устройство. Но как "разбира" в каква посока трябва да започне да се върти, когато го пусне, ако на него са пуснати само една фаза и нула? В такъв асинхронен двигател принципът на работа е същият като този на трифазния - въртене на магнитното поле. За да направите това, всеки двигател има още един контакт - стартиране.
В нашите домакински уреди най-често можете да намерите същото асинхронно устройство. Но как "разбира" в каква посока трябва да започне да се върти, когато го пусне, ако на него са пуснати само една фаза и нула? В такъв асинхронен двигател принципът на работа е същият като този на трифазния - въртене на магнитното поле. За да направите това, всеки двигател има още един контакт - стартиране.
Статорът има две намотки с ъгъл 90° между тях. И двете групи намотки са свързани към една и съща фаза, но за да се осигури същото изместване на 90° между намотките, едната от тях е свързана чрез кондензатор. Това кара магнитното поле да се върти.
Подобни двигатели се използват например в кафемелачки или сокоизстисквачки. Можете да чуете как се променя звук на индукционен двигателв тези устройства, когато са под натоварване. На празен ход скоростта на ротора е очевидно по-висока.
Обобщавайки, важно е да се каже, че асинхронните електродвигатели са придобили голяма популярност. Разбира се, не трябва да забравяме и някои от недостатъците. Въпреки това, всички те се припокриват поради много предимства.
Електрически машини, които преобразуват електрическа енергияпроменлив ток в механична енергия се наричат AC двигатели.
В промишлеността най-широко се използват трифазни асинхронни двигатели.Нека разгледаме устройството и принципа на работа на тези двигатели.
Принципът на работа на асинхронния двигател се основава на използването на въртящо се магнитно поле.
За да разберем работата на такъв двигател, ще направим следния експеримент.
Фиксираме подковообразния магнит върху оста, така че да може да се върти от дръжката. Между полюсите на магнита поставяме на оста меден цилиндър, който може да се върти свободно.
Фигура 1. Най-простият модел за получаване на въртящо се магнитно поле
Нека започнем да въртим магнита с дръжката по посока на часовниковата стрелка. Полето на магнита също ще започне да се върти и по време на въртене ще пресича медния цилиндър със своите силови линии. В цилиндъра, съгласно закона за електромагнитната индукция, ще възникнат вихрови токове, които ще създадат собствено магнитно поле - полето на цилиндъра. Това поле ще взаимодейства с магнитното поле на постоянния магнит, карайки цилиндъра да се върти в същата посока като магнита.
Установено е, че скоростта на въртене на цилиндъра е малко по-малка от скоростта на въртене на магнитното поле.
Наистина, ако цилиндърът се върти със същата скорост като магнитното поле, тогава магнитните силови линии не го пресичат и следователно в него не възникват вихрови токове, причинявайки въртенето на цилиндъра.
Скоростта на въртене на магнитното поле обикновено се нарича синхронна, тъй като е равна на скоростта на въртене на магнита, а скоростта на въртене на цилиндъра се нарича асинхронна (несинхронна). Следователно самият двигател се нарича асинхронен двигател. Скоростта на въртене на цилиндъра (ротора) се различава от синхронната скорост на въртене на магнитното поле с малко количество, наречено приплъзване.
Означавайки скоростта на въртене на ротора през n1 и скоростта на въртене на полето през n, можем да изчислим количеството на приплъзване в проценти по формулата:
s = (n - n1) / n.
В горния експеримент получихме въртящо се магнитно поле и въртенето на цилиндъра, причинено от него поради въртенето на постоянен магнит, така че такова устройство все още не е електрически двигател. Необходимо е да се принуди електрически ток, за да се създаде въртящо се магнитно поле и да се използва за въртене на ротора. Тази задача беше блестящо решена от М. О. Доливо-Доброволски по негово време. Той предложи да се използва трифазен ток за тази цел.
Устройството на асинхронен електродвигател М. О. Доливо-Доброволски
Фигура 2. Схема на асинхронен електродвигател Доливо-Доброволски
Три намотки са поставени на полюсите на пръстеновидна желязна сърцевина, наречена статор на електродвигател, трифазни токови мрежи 0, разположени една спрямо друга под ъгъл от 120 °.
Вътре в ядрото върху оста е фиксиран метален цилиндър, наречен ротор на електродвигателя.
Ако намотките са свързани помежду си, както е показано на фигурата, и са свързани към мрежа с трифазен ток, тогава общият магнитен поток, създаден от трите полюса, ще се окаже въртящ се.
Фигура 3 показва графика на промените в токовете в намотките на двигателя и процеса на възникване на въртящо се магнитно поле.
Нека разгледаме по-подробно този процес.
Фигура 3. Получаване на въртящо се магнитно поле
В позиция "А" на графиката токът в първата фаза е нула, във втората фаза е отрицателен, а в третата фаза е положителен. Токът през полюсните намотки ще тече в посоката, посочена от стрелките на фигурата.
След като определихме с правилото на дясната ръка посоката на магнитния поток, създаден от тока, ще се уверим, че южният полюс (S) ще бъде създаден във вътрешния край на полюса (с лице към ротора) на третата намотка, и северният полюс (C) ще бъде създаден на полюса на втората намотка. Общият магнитен поток ще бъде насочен от полюса на втората намотка през ротора към полюса на третата намотка.
В позиция "B" на графиката токът във втората фаза е нула, в първата фаза е положителен, а в третата фаза е отрицателен. Токът, протичащ през полюсните намотки, създава южен полюс (S) в края на първата намотка и северен полюс (C) в края на третата намотка. Общият магнитен поток сега ще бъде насочен от третия полюс през ротора към първия полюс, т.е. полюсите ще се преместят на 120°.
В позиция "B" на графиката токът в третата фаза е нула, във втората фаза е положителен, а в първата фаза е отрицателен. Сега токът, протичащ през първата и втората намотка, ще създаде северен полюс (C) в края на полюса на първата намотка и южен полюс (S) в края на полюса на втората намотка, т.е. полярността от общото магнитно поле ще се премести с още 120 °. В позиция "G" на графиката, магнитното поле ще се премести с още 120 °.
По този начин общият магнитен поток ще промени посоката си с промяна в посоката на тока в намотките (полюсите) на статора.
В този случай, за един период на промяна на тока в намотките, магнитният поток ще направи пълна революция. Въртящият се магнитен поток ще увлече цилиндъра със себе си и по този начин ще получим асинхронен електродвигател.
Спомнете си, че на Фигура 3 намотките на статора са свързани чрез „звезда“, но се образува и въртящо се магнитно поле, когато са свързани чрез „триъгълник“.
Ако разменим намотките на втората и третата фаза, тогава магнитният поток ще промени посоката на въртене към противоположната.
Същият резултат може да се постигне без размяна на намотките на статора, а чрез насочване на тока на втората фаза на мрежата към третата фаза на статора и третата фаза на мрежата във втората фаза на статора.
Така посоката на въртене на магнитното поле може да се промени чрез превключване на произволни две фази.
Разгледахме устройството на асинхронен двигател с три намотки на статора. В този случай въртящото се магнитно поле е биполярно и броят на неговите обороти за една секунда е равен на броя на периодите на промяна на тока за една секунда.
Ако около обиколката на статора се поставят шест намотки, ще се създаде четириполюсно въртящо се магнитно поле. С девет намотки полето ще бъде шестполюсно.
При честота на трифазен ток f, равна на 50 периода в секунда или 3000 в минута, броят на оборотите n на въртящото се поле в минута ще бъде:
с двуполюсен статор n \u003d (50 x 60) / 1 \u003d 3000 rpm,
с четириполюсен статор n \u003d (50 x 60) / 2 \u003d 1500 rpm,
с шестполюсен статор n \u003d (50 x 60) / 3 \u003d 1000 rpm,
с броя на двойките полюси на статора, равен на p: n = (f x 60) / p,
И така, ние установихме скоростта на въртене на магнитното поле и неговата зависимост от броя на намотките на статора на двигателя.
Роторът на двигателя, както знаем, ще изостане малко в своето въртене.
Закъснението на ротора обаче е много малко. Така например, когато работа на празен ходдвигател, разликата в оборотите е само 3%, а при натоварване 5 - 7%. Следователно скоростта на асинхронния двигател се променя в много малки граници при промяна на товара, което е едно от неговите предимства.
Помислете сега за устройството на асинхронни електродвигатели
Статорът на модерен асинхронен електродвигател има неизразени полюси, т.е. вътрешната повърхност на статора е напълно гладка.
За да се намалят загубите от вихрови токове, сърцевината на статора е направена от тънки щамповани стоманени листове. Сглобеното ядро на статора е фиксирано в стоманен корпус.
В слотовете на статора е положена намотка от меден проводник. Фазовите намотки на статора на електродвигателя са свързани чрез "звезда" или "триъгълник", за които всички начала и краища на намотките се довеждат до корпуса - към специален изолационен щит. Такова статорно устройство е много удобно, тъй като ви позволява да включите намотките му за различни стандартни напрежения.
Роторът на асинхронния двигател, подобно на статора, е сглобен от щамповани стоманени листове. Намотката е положена в жлебовете на ротора.
В зависимост от конструкцията на ротора асинхронните електродвигатели се разделят на двигатели с ротор с катерица и фазов ротор.
Намотката на ротора с катерица е направена от медни пръти, поставени в жлебовете на ротора. Краищата на пръчките са свързани с меден пръстен. Такава намотка се нарича намотка "катерица". Имайте предвид, че медните пръти в жлебовете не са изолирани.
При някои двигатели клетката на катерицата се заменя с лят ротор.
Асинхронен двигател с фазов ротор (с контактни пръстени) обикновено се използва в електродвигатели с голяма мощност и в тези случаи; когато е необходимо електрическият мотор да генерира голяма сила при потегляне. Това се постига с факта, че в намотките фазов двигателстартовият реостат е включен.
Асинхронните двигатели с катерица се стартират по два начина:
1) Директна връзка трифазно напрежениемрежа към статора на двигателя. Този метод е най-лесният и популярен.
2) Намаляване на напрежението, подавано към намотките на статора. Напрежението се намалява, например, чрез превключване на намотките на статора от звезда към триъгълник.
Двигателят се стартира, когато намотките на статора са свързани със звезда, а когато роторът достигне нормална скорост, намотките на статора преминават към триъгълник.
Токът в захранващите проводници с този метод за стартиране на двигателя се намалява 3 пъти в сравнение с тока, който би възникнал при стартиране на двигателя чрез директно свързване към мрежата със статорни намотки, свързани с "триъгълник". Този метод обаче е подходящ само ако статорът е проектиран за нормална работа, когато намотките му са свързани в "триъгълник".
Най-простият, евтин и надежден е асинхронният електродвигател с ротор с катерица, но този двигател има някои недостатъци - ниска стартова сила и висок стартов ток. Тези недостатъци до голяма степен се елиминират чрез използването на фазов ротор, но използването на такъв ротор значително оскъпява двигателя и изисква стартов реостат.
Принцип на действие
Принципът на работа на асинхронния електродвигател се основава на взаимодействието на индуцирания ток на ротора с магнитния поток на статора. При включване на намотката трифазен двигателпод напрежението на трифазен източник на променлив ток вътре в отвора на статора се образува въртящо се магнитно поле, чиято честота на въртене е равна на
n1=60fp
където n1 е честотата на въртене на магнитното поле, rpm; f - текуща честота, Hz; p е броят на двойките магнитни полюси на двигателя.
Силовите линии на въртящото се магнитно поле пресичат прътите на намотката на ротора с късо съединение и в тях се индуцира ЕМП, което причинява появата на ток и магнитен поток в ротора на двигателя.
Взаимодействието на магнитното поле на статора с магнитния поток на ротора създава механичен въртящ момент, под въздействието на който роторът започва да се върти. Скоростта на ротора е малко по-малка от скоростта на магнитното поле. Следователно двигателят се нарича асинхронен.
Стойността, характеризираща изоставането на ротора от магнитното поле в относителни единици, се нарича приплъзване, изчислява се по формулата
S = (n1−n2)/n1,
където S - приплъзване (относително ъглова скорост); n1 - честота на въртене на магнитното поле, rpm; n2 - номинална скорост на ротора, об / мин.
За да свържете двигателя към мрежата, статорните му намотки трябва да бъдат свързани в "звезда" или "триъгълник".
Ориз. 4 Схеми на свързване:
a - триъгълник, b - звезда.
За да включите двигателя по схемата "триъгълник", трябва да свържете началото на първата намотка към края на втората, началото на втората намотка към края на третата и началото на третата към край на първия. Точките на свързване на намотките са свързани към три фази на мрежата (фиг. 4, а).
За да свържете двигателя към мрежата по схемата "звезда", е необходимо да свържете всички краища на намотките електрически към една точка и да свържете всички начала на намотките към фазите на мрежата (фиг. 4 , б).
Схемите на свързване винаги се показват на обратната страна на капака, който затваря клемната кутия на двигателя.
За да промените посоката на въртене на трифазен асинхронен двигател, е достатъчно да размените всеки две фази на мрежата, независимо от схемата на превключване на двигателя. За бърза промяна на посоката на въртене на двигателя се използват реверсивни превключватели, пакетни превключватели или реверсивни магнитни стартери.
Трифазен асинхронен електродвигател с ротор с катерица, заедно с простотата на дизайна, високата надеждност при работа, издръжливостта, ниската цена и гъвкавостта, има един съществен недостатък: когато се стартира, възниква пусков ток, стойността на кое е 5-7 пътиповече от номинално. Голям стартов ток електрическа мрежаобикновено не се изчислява, причинява значително намаляване на напрежението, което от своя страна влияе неблагоприятно върху стабилната работа на съседните електрически приемници.
За да се намалят пусковите токове на трифазни асинхронни двигатели с катерица с висока мощност, те се включват с помощта на превключвател звезда-триъгълник. В този случай първо намотките на двигателя се свързват по схемата "звезда", след което, след като роторът на двигателя достигне номиналната скорост, намотките му се превключват към схемата "триъгълник".
Намаляването на пусковия ток на двигателя при превключване на намотките му от звезда към триъгълник се получава, защото вместо веригата "триъгълник", предназначена за дадено мрежово напрежение, всяка намотка на двигателя се включва на напрежение √3 пъти по-малко и консумираният ток се намалява три пъти. Мощността, развивана от електрическия мотор при стартиране, също е намалена трикратно. Следователно описаният метод за намаляване на пусковия ток може да се използва само при товар не повече от 1/3 от номиналния.
Трифазната система за променлив ток, която направи възможно създаването на устройства за получаване на въртящ се магнитен поток, доведе до появата на най-често срещания електрически двигател в момента, наречен асинхронен. Това име се дължи на факта, че въртящата се част на машината - роторът - винаги се върти със скорост, която не е равна на скоростта на магнитния поток, т.е. извън синхрон с него. Произведен от части от вата до хиляди киловата при напрежения от 127, 220, 380, 500, 600, 3000, 6000, 10 000 V, този електродвигател е прост по дизайн, надежден при работа и евтин в сравнение с други видове. Използва се при всички видове работа, където не се изисква поддържане на постоянна скорост на въртене, както и в бита, в монофазен вариант за ниска мощност.
Принципът на работа на асинхронен двигател
Помислете за устройството, показано на фиг. Състои се от постоянен магнит 1, меден диск 2, дръжка 3 и лагери 4. Ако завъртите магнита с дръжката, медният диск започва да се върти в същата посока, но с по-ниска честота. Един меден диск може да се разглежда като безброй затворени завои; когато магнит 1 се върти, неговите магнитни силови линии (m.s.l.) пресичат завоите на диска и в завоите се индуцира електродвижеща сила
Означават:
n, - честота на въртене на магнита (синхронна честота), rpm;
n2 - честота на въртене на диска, rpm; n - разликата между честотите на въртене на магнита и диска, rpm.
Скоростта на въртене на диска е по-малка от скоростта на въртене на магнита и следователно дискът се върти с несинхронна (асинхронна) честота. Разликата между честотите на магнита и диска е честотата, с която M.S.L. пресечете завоите на диска. Съотношението на честотната разлика към синхронната честота се нарича приплъзване. Приплъзването може да бъде изразено в части от единица или като процент:

В двигателите се създава въртящо се магнитно поле трифазен токпротичащ през намотката на статора, а ролята на диска се изпълнява от намотката на ротора. Активната стомана на статора и ротора служи като магнитна верига, която намалява съпротивлението на магнитния поток стотици пъти.
Под въздействието на мрежовото напрежение Ul, приложено към статора, в неговата намотка протича ток I. Този ток създава въртящ се магнитен поток F, който се затваря през статора и ротора. Потокът създава ЕДС в двете намотки. E( и E2, както в първичната, така и във вторичната намотка на трансформатора. По този начин асинхронният двигател е подобен трифазен трансформатор, при което ед.с генерирани от въртящ се магнитен поток. 
Ориз. 2. Работа на асинхронен двигател при cos f2 = 1
Оставете потока да се върти по посока на стрелката на часовника. Под въздействието на емф. E2 в намотката на ротора ще тече ток I2, чиято посока е показана на фиг. 2. Да приемем, че е във фаза с E2. Взаимодействието на тока I2 и потока Ф създава електромагнитни сили F, които карат ротора да се върти, следвайки въртящия се поток. По този начин асинхронният двигател е трансформатор с въртяща се вторична намотка и следователно може да преобразува електрическа сила E2I2 cos f към механичен.
Роторът винаги изостава от въртящия се магнитен поток, тъй като само в този случай може да възникне емф. E2 и следователно тока 12 и силата F. За да промените посоката на въртене на ротора, трябва да промените посоката на въртене на потока. За да направите това, разменете всеки два проводника, които подават ток от мрежата към статора. В този случай последователността от фази ABC се променя на ACB или BAC и потокът се върти в обратна посока.
Роторът на двигателя се върти с асинхронна честота n2, поради което двигателят се нарича асинхронен. Честотата на въртене на магнитния поток се нарича синхронна честота n1. Честота на въртене ![]() ротор
ротор
Теоретично, приплъзването варира от 1 до 0 или от 100% до 0, тъй като при неподвижен ротор в първия момент на стартиране, n2 - 0; и ако си представим, че роторът се върти синхронно с потока, n2 = nx.
Колкото по-голямо е натоварването на вала, толкова по-ниска е скоростта на ротора n2 и следователно по-голямото S, тъй като по-големият спирачен момент трябва да бъде балансиран от въртящия момент; последното е възможно само с увеличаване на E2 и I2, а оттам и S. Приплъзването при номинален товар SH за асинхронни двигатели е от 1 до 7%; по-ниското число се отнася за мощни двигатели.