Schéma de mise en marche du moteur par un démarrage progressif. Modifications triphasées. Sélection du démarreur progressif
Dispositif démarrage en douceur moteur (en abrégé SC) est un mécanisme utilisé pour freiner la croissance des caractéristiques de démarrage. Il rend les processus de démarrage et d'arrêt du moteur doux, le protégeant de la surchauffe et des secousses, et augmente la durée de vie. S'applique uniquement à moteurs à induction.
Lors du démarrage du moteur directement en un instant, le couple atteint 150-200% de la valeur nominale. Dans le même temps, des courants de démarrage se forment qui dépassent le courant nominal de 5 fois ou même plus. Les caractéristiques augmentées lors du démarrage du moteur posent des problèmes :
Certains appareils insensibles ont. Dans le cas où sur la figure 13 seul le courant de ligne circule et qu'il n'y a pas de courant traversant le neutre, donc deux thyristors de phases différentes doivent se déplacer en même temps. Cependant Tension nominale fondamentalement le même.
Pour ce régime, six bornes de charge comme moteur. Pour que le courant circule dans la charge, deux ou trois thyristors de phases différentes doivent conduire au temps, et une impulsion dans la porte échoue car les temps de commutation instantanés dans chaque thyristor sont différents. Quand est-ce charge inductive, le comportement du courant est monophasé, qui est renvoyé au train d'impulsions sous forme de déclenchement de porte. Pour une charge résistive, le thyristor peut piloter tension secteur seulement avant que la conduction puisse commencer à 30 et se terminer à 180, alors la plage d'angle de conduction du thyristor est solo.
- Endommagement de l'isolation des enroulements et arrêt du fonctionnement en raison d'une surchauffe.
- Défaillance de la chaîne cinématique du fil due à la rupture des bandes transporteuses, aux à-coups mécaniques ou aux chocs hydrauliques.
- Un démarrage difficile qui empêche son aboutissement.
Ce sont ces problèmes qui causent moteur électrique le besoin d'un démarreur progressif. Grâce à lui, le moteur accélère en douceur, sans à-coups ni à-coups. Les courants de démarrage sont réduits. Par conséquent, un état d'isolation satisfaisant durera longtemps.
D'où la séquence de déclenchements du groupe contrôlant le courant sortant ; α, α plus 10 et α plus 40 respectivement, et se produit de manière similaire avec les thyristors qui contrôlent courant inverse; α plus 180, α plus 300 et α plus 40 ou α supérieur. Selon la valeur de l'angle de conduction α, il existe trois modes de commutation différents pour les thyristors.
Ensuite, les contraintes dans la charge selon la Fig. 9 peut être égal à zéro ou à la moitié de la tension de ligne. Il y a donc deux parties dans l'analyse; le premier, lorsqu'il y a trois thyristors de phases différentes, qui génèrent simultanément une tension de charge similaire à la tension de phase d'entrée, et le second, lorsque seuls deux dispositifs sont exécutés, et la tension de charge sera la moitié de la tension de ligne. Ces deux conditions de commutation alternent.
Mais comment comprendre que le démarrage est difficile et que le moteur doit être équipé d'un démarreur progressif? Pour ce faire, familiarisez-vous avec la description de trois cas de ce phénomène:
- Démarrage trop dur pour la source d'alimentation utilisée. Un courant est nécessaire à partir du réseau, qu'il ne peut générer que lorsqu'il "travaille pour l'usure" ou ne peut pas du tout produire une telle valeur. Lorsque vous essayez de démarrer à l'entrée du système, les machines sont coupées, les ampoules sont éteintes. Certains contacteurs et relais de transfert sont désactivés et le groupe électrogène cesse de fonctionner. Dans ce cas, le démarreur progressif aidera si le réseau d'alimentation peut fournir 250% du courant nominal au lieu de 500-800%, qui étaient au-delà de sa puissance. Si le réseau ne donne même pas 250%, il est inutile d'installer un démarreur progressif.
- Le moteur ne démarre pas directement (ne commence pas à tourner ou n'accélère pas à la vitesse souhaitée, provoquant le déclenchement du système de protection). Le démarreur progressif n'aidera pas, mais vous pouvez essayer de corriger la situation avec un convertisseur de fréquence.
- Le démarrage est excellent, mais la machine s'éteint à l'entrée avant même que la fréquence nominale ne soit réglée. SCP peut aider, mais ce n'est pas nécessaire. Plus la vitesse est proche de valeur nominale au moment où la machine est déclenchée, plus les chances de succès sont grandes.
Les démarreurs progressifs avancés pour moteurs asynchrones offrent des fonctionnalités supplémentaires :
Des courants alternatifs dans le stator et le rotor circulent dans les machines à induction. L'enroulement du stator est triphasé et bipolaire ou plus, similaire à ceux utilisés par les machines synchrones. L'enroulement du rotor n'a pas de puissance propre et peut être de type bobinage ou à cage blanche. Dans un moteur asynchrone, le rotor ne reçoit pas d'énergie par conduction, mais par induction. Ainsi, un moteur à induction est un transformateur avec un enroulement secondaire tournant. Figure 15 Les pièces principales d'un moteur asynchrone sans balais.
- Protection contre les courts-circuits lors du démarrage ;
- Prévention des défaillances de phase ;
- Exclusion des allumages répétés non planifiés ;
- Protection contre le dépassement des charges nominales.
Vous pouvez utiliser de tels dispositifs non seulement pour adoucir le démarrage, mais également pour arrêter le moteur en douceur. Le graphique ci-dessous montre la dépendance de la vitesse de rotation du moteur au temps lors d'un démarrage direct et de l'utilisation du démarreur progressif (le deuxième nom du démarreur progressif).
Les moteurs électriques améliorent leur protection. Édition de mars Stator de moteur asynchrone. Un corps en acier ou en alliage léger entoure une couronne en acier au silicium à paroi mince. Les feuilles sont isolées les unes des autres par des vernis d'oxydation ou isolants, comme le montre la figure. Le laminage des circuits magnétiques réduit les pertes dues à l'hystérésis et aux courants de Foucault ou courants de Foucault.
Les feuilles ont des rainures dans lesquelles sont placés des enroulements fixes, conçus pour créer un champ tournant. Chaque enroulement est composé de plusieurs bobines. C'est une partie mobile du moteur. Comme le circuit magnétique du stator, il se compose d'un empilement de feuilles minces isolées les unes des autres et forme un cylindre autour de l'arbre ou de l'arbre du moteur, comme indiqué sur la figure. Cet élément, de par sa technologie, permet de distinguer deux familles de moteurs asynchrones : l'une dont le rotor est repéré par une cage, et l'autre, sur le bobinage rotor duquel sont repérés des anneaux.
Un bonus supplémentaire pour les possesseurs de SCP : il sera possible de capter une source moins puissante Alimentation sans interruption s'il y en a besoin.
Le principe de fonctionnement du démarreur progressif
Les startsofteurs sont :
- Mécanique;
- Électrique.
Considérez le principe de fonctionnement de chaque type de SCP.
Contrôle mécanique des caractéristiques de démarrage
Le moyen le plus simple de faciliter le démarrage du moteur électrique consiste à limiter de force la vitesse de rotation croissante. Pour ce faire, vous pouvez utiliser l'appareil en ajustant mécaniquement la rotation de l'arbre. Il s'agit notamment des plaquettes de frein, des équilibreurs de tir, des verrouillages magnétiques et des coupleurs hydrauliques.
Figure 18 Pièces principales d'un rotor typique. Le rotor robuste est généralement une simple cage. La cage est fermée par deux anneaux solides. Ces moteurs au couple nominal ont une grande quantité de glissement. Son couple de démarrage est élevé et le courant de démarrage est faible, comme le montre la figure. Le rotor a beaucoup de pertes et entraîne de mauvaises performances du moteur. 33. Dans des évidements ou rainures situés le long du rotor, les conducteurs sont reliés à chaque extrémité par une couronne métallique ; ces conducteurs développent le couple généré par le champ tournant.
Dans chaque cas, le principe d'action est différent. Cependant, vous pouvez imaginer ce qui se passe lors du contrôle mécanique de la vitesse en utilisant l'exemple d'un disque en rotation : essayez de le toucher avec un objet. Une force de frottement se forme entre celui-ci et le disque, qui sera dirigé vers le côté opposé concernant la rotation. Cela signifie que le disque aura besoin de plus de temps pour accélérer jusqu'à la valeur définie. La vitesse augmentera progressivement.
Pour que le couple soit homogène, les conducteurs sont légèrement inclinés par rapport à l'axe du moteur. Le tout a l'apparence d'une cage blanche, d'où le nom de ce type de rotor. En règle générale, la cellule de la protéine est complètement moulée. L'aluminium est pompé sous pression et les ailettes de refroidissement placées dans la même opération assurent le court-circuit des conducteurs du rotor. Ces moteurs ont un couple de démarrage relativement faible et un courant de démarrage supérieur au chiffre nominal de 19, en revanche, ils ont très peu de glissement au couple nominal.
Ils sont principalement utilisés pour les grandes puissances afin d'améliorer les performances des installations avec pompes et ventilateurs. Ils sont également couplés à des convertisseurs de fréquence à vitesse variable, de sorte que les problèmes de couple et de courant de démarrage sont complètement résolus. Double rotor rotatif. Il se compose de deux cadres concentriques, l'un externe, de petite section avec grande résistance et une autre partie intérieure d'une plus grande section avec moins de résistance. Au démarrage, les courants du rotor ont une fréquence élevée, et du fait de l'effet de film, tout le courant du rotor circule le long de la périphérie du rotor et, par conséquent, le long de la réduction la Coupe transversale dans les conducteurs.
Dispositifs électriques pour démarrage progressif des moteurs électriques
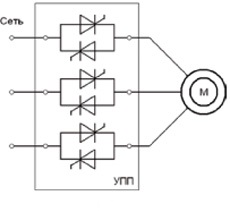
Le principe de fonctionnement des démarreurs électriques est de limiter la tension fournie au moteur à l'aide de thyristors connectés en parallèle, comme le montre la figure ci-dessous.
Ainsi, au début du démarrage, à des courants élevés de haute fréquence, 34. Le couple généré par la cage externe stable est important même avec une faible quantité de courant. En fin de course, la fréquence dans le rotor diminue et la circulation du courant à travers la cage intérieure devient plus facile. Le moteur se comporte alors comme s'il était construit comme une seule cellule à faible résistance. En régime établi, la vitesse est légèrement inférieure à celle d'un moteur monopuissance. Sur la fig. La figure 19 montre les courbes de vitesse de rotation pour chaque type de rotor.
Rotor rotatif de l'édition de mars. Les conducteurs du rotor sont moulés dans les rainures du rotor, qui sont de forme trapézoïdale, et le petit côté du trapèze est situé à l'extérieur du rotor. Le fonctionnement est similaire à celui d'un moteur à deux blocs : le courant du rotor varie en sens inverse de sa fréquence.
Pour mieux comprendre comment fonctionne le startsofter, vous devez étudier le lancement plus en détail. Théoriquement, c'est le processus de conversion de l'énergie électrique en énergie cinétique. Dans ce cas, la résistance du moteur d'une petite valeur, caractéristique d'un moteur non tournant, augmente à une grande, lorsque la vitesse nominale est déjà atteinte. Et selon la loi d'Ohm (I \u003d U / R) au moment initial, le courant est maximum.
Ainsi : au début du démarrage, le couple est plus élevé et le courant est plus faible. En mode stationnaire, la vitesse est essentiellement égale à la vitesse d'un seul séparateur. 35. Dans les rainures à la périphérie du rotor sont placés des enroulements identiques aux spires du stator. Habituellement, le rotor est triphasé. Une extrémité de chacun des enroulements est reliée à un point commun. Les extrémités libres peuvent être connectées à un connecteur centrifuge ou à trois anneaux de cuivre isolés qui tournent avec le rotor. Sur ces couronnes, retournez les balais à base de graphite reliés au démarreur.
Selon la valeur des résistances insérées dans le circuit rotorique, ce type de moteur peut développer un couple de démarrage jusqu'à 5 fois le couple nominal. Le courant de démarrage est quasiment proportionnel au couple développé sur l'arbre moteur. Cette solution est progressivement supprimée des systèmes électroniques associés aux moteurs standard. Il ne peut y avoir de couple que s'il y a un courant induit circulant dans la boucle. Ce couple dépend du courant circulant dans la boucle et ne peut exister que s'il y a un changement de flux dans la boucle.
La formule énergétique est : E=P*t=U*I*t. Et comme le courant est maximum au début du démarrage, l'énergie doit être transférée très rapidement. Si vous connectez le moteur électrique au réseau de vos propres mains via le démarreur progressif, la deuxième formule fonctionnera à l'entrée de l'appareil. L'énergie sera fournie très rapidement, mais la sortie sera lente. Ceci est réalisé en limitant la tension pour contrôler l'augmentation du courant d'appel. Et puisque le courant a la même valeur dans les deux formules, on peut voir que plus l'intensité du courant est faible, plus il faudra de temps pour accélérer. Mais l'accélération sera douce.
Par conséquent, il est nécessaire d'avoir une différence de vitesse entre le virage et le champ tournant. Pour cette raison, un moteur électrique fonctionnant selon ce principe est appelé moteur à induction. Ainsi, au démarrage, la fréquence du courant rotorique est maximale. Des moteurs électriques qui améliorent leur protection. La courbe caractéristique de couple d'un moteur à induction, donnée en 0 et 1, fournit plusieurs informations importantes sur le fonctionnement des moteurs à induction. Le couple moteur induit est nul à vitesse synchrone.
Important! Malgré la nécessité de réduire les courants de démarrage, ils ne doivent pas être réglés trop bas. Sinon, le moteur ne pourra pas accélérer. Habituellement, il suffit de réduire le courant à 250% du courant nominal (avec un démarrage direct, il est de 500 à 800%).
Gestion des démarreurs électriques
Il existe deux types appareils électriques adoucir le processus de démarrage :
La courbe de couple est approximativement linéaire entre le vide et la pleine charge ; car à mesure que le glissement augmente, il y a une augmentation linéaire : courant rotorique, champ magnétique rotorique et couple induit. Le couple maximal ou de renvoi est égal ou 3 fois le couple nominal et ne peut être dépassé. Figure 0 Caractéristique de couple pour un moteur asynchrone.
Voiture électrique. 3ème édition. Pour un glissement donné, le couple inductif varie avec le carré de la tension appliquée. Ce fait est utile pour contrôler la vitesse des moteurs à induction. La machine à induction fonctionne comme un générateur dans de rares cas, car le fonctionnement dans ce mode est inefficace, cela se produit lorsque la vitesse du rotor est supérieure à synchrone. Pour décélérer rapidement le moteur, deux phases sont activées, ce qui signifie un changement de sens de rotation champ magnétique.
- Avec contrôle d'amplitude;
- avec contrôle de phase.
Le fonctionnement du démarreur progressif d'amplitude est basé sur une augmentation progressive de la tension aux bornes du moteur jusqu'à une valeur maximale. De tels dispositifs aident à démarrer les moteurs électriques en mode ralenti ou avec une petite charge.
Les adoucisseurs à démarrage de phase régulent les caractéristiques de fréquence du courant de phase sans réduire la tension. Cela vous permet de conserver la puissance élevée du moteur, qui peut être démarré même avec une charge importante. Vous pouvez définir une augmentation régulière de la fréquence de rotation même en mode de fonctionnement. C'est une caractéristique importante, grâce à laquelle vous pouvez modifier la vitesse de l'arbre sans perdre de puissance.
Figure 1 Courbe de couple montrant des plages de fonctionnement étendues. Cours de conception pour moteurs asynchrones. La National Electrical Manufacturers Association aux États-Unis et la Commission électrotechnique internationale en Europe ont mis au point un système d'identification par lettre pour les moteurs commerciaux. Il est possible de produire différentes courbes de couple comme indiqué sur la figure en modifiant les caractéristiques du rotor des moteurs à induction. Pour aider l'industrie à sélectionner les bons moteurs pour diverses applications sur toute la plage de puissance.
Équiper ou non le moteur d'un démarreur progressif dépend de vous, tant qu'il ne s'arrête pas à mi-accélération. Mais gardez à l'esprit qu'à l'étranger il est interdit d'utiliser des moteurs d'une puissance supérieure à 15 000 watts sans un démarrage plus doux. Essayer d'économiser sur le démarreur progressif peut entraîner une usure prématurée du mécanisme. Si vous ne voulez vraiment pas dépenser beaucoup, installez simplement l'appareil de vos propres mains, mais assurez-vous de l'acheter.
Figure Courbes caractéristiques typiques pour différentes conceptions de rotor. Ils sont de conception standard avec un couple de démarrage normal, courant de démarrage et faible glissement. Le glissement de charge total des moteurs de classe A doit être inférieur à 5 %. Le couple de démarrage de cette conception est au moins le couple nominal gros moteurs et est de 00 % ou plus du couple nominal des petits moteurs. Le principal problème avec ce type de conception est le courant de démarrage extrêmement élevé.
Si la puissance dépasse 5 CV une certaine forme de déclenchement doit être utilisée pour éviter les problèmes de chute de tension dans le système d'alimentation auquel ils sont connectés. Ces moteurs sont utilisés dans les ventilateurs, les soufflantes, les pompes, les tours et autres machines. 39. Ceux-ci sont appelés moteurs à usage général, et la plupart des moteurs à rotor sont de ce type. rotor à cage d'écureuil, ont un couple de démarrage normal, un faible courant de démarrage et un faible glissement. Ce moteur produit quasiment le même couple de démarrage qu'un moteur de classe A, soit 5% de courant en moins.
L'utilisation efficace des démarreurs progressifs (SCD) n'est possible que si le calibre est correctement sélectionné. Les principaux critères de sélection sont généralement le type de charge du moteur, la fréquence des démarrages, ainsi que les données de la plaque signalétique.
Les caractéristiques de démarrage des appareils peuvent différer considérablement les unes des autres et leurs valeurs dépendent de la gamme de tâches à résoudre. C'est pourquoi, lors du choix d'un démarreur progressif pour moteurs asynchrones, il est si important de considérer l'étendue de son application future.
Les caractéristiques de départ peuvent être grossièrement divisées en trois catégories.
Modes de fonctionnement du démarreur progressif
Le mode normal est limité par la valeur des courants de démarrage au niveau de 3,5 x Inom, avec un temps de démarrage de 10 à 20 secondes.
Les charges lourdes se caractérisent par des charges avec un moment d'inertie légèrement plus élevé. Les courants de démarrage sont limités à 4,5 x I nom et le temps d'accélération est de 30 secondes.
Les charges très lourdes impliquent des moments d'inertie très élevés. Les courants de démarrage atteignent le niveau de 5,5 x I nom et le temps d'accélération peut largement dépasser 30 secondes.
Types de SCP
Schème Le fonctionnement du démarreur progressif peut être de l'un des quatre types suivants :
1. Régulateurs de couple de démarrage contrôler une seule phase d'un moteur asynchrone triphasé. Bien que ce type de commande soit capable de contrôler un démarrage progressif, il n'apporte aucune réduction des courants de démarrage.
En effet, lors de l'utilisation de régulateurs de couple de démarrage, le courant sur les bobinages du moteur est approximativement égal au courant obtenu avec un démarrage direct. En même temps, ce courant parcourt les enroulements plus longtemps que dans le cas d'un démarrage direct, de sorte que le moteur peut surchauffer.
Les appareils de ce type ne peuvent pas être utilisés pour les variateurs qui doivent réduire les courants d'appel. Ils ne peuvent assurer le démarrage des mécanismes à forte inertie (risque de surchauffe du moteur), ainsi que les démarrages/arrêts fréquents du variateur.
2. Régulateurs de tension sans signal de retour ne peut fonctionner que selon un programme utilisateur codé en dur. Il n'y a pas de retour du moteur, ils ne peuvent donc pas modifier le régime moteur, en l'ajustant à une charge changeante. Sinon, ils répondent à toutes les exigences applicables aux démarreurs progressifs et sont capables de contrôler toutes les phases du moteur. Ce sont peut-être les plus populaires démarreurs progressifs.
Tableau 1 Mode de fonctionnement en fonction de l'application
Schème le démarrage du moteur est déterminé par le préréglage de la tension de démarrage, ainsi que du temps nécessaire au démarrage. De nombreux appareils de ce type peuvent également limiter la quantité de courant d'appel - ceci est réalisé en réduisant la tension au démarrage. Bien entendu, de tels régulateurs sont également capables de contrôler la décélération du mécanisme, en effectuant un arrêt en douceur et prolongé.
Les régulateurs biphasés peuvent réduire la tension en trois phases, mais le courant est déséquilibré.
3. Régulateurs de tension avec signal retour d'information sont des versions améliorées des appareils décrits ci-dessus. Ils sont capables de lire la valeur du courant et d'ajuster la tension afin que le courant ne dépasse pas les limites définies par l'utilisateur. Aussi, les données reçues sont utilisées pour le fonctionnement de diverses protections (contre le déséquilibre de phase, la surcharge, etc.).
Tel démarreur progressif pour moteurs asynchrones peuvent être regroupés avec d'autres appareils similaires dans un seul système de commande de moteur.
4. Régulateurs de courant avec signal de retour. Ce sont les plus modernes démarreurs progressifs. Schème le travail est basé sur la régulation de l'intensité du courant, et non de la tension, comme les modèles précédents. Cela offre une meilleure précision de contrôle, une programmation plus facile et une configuration plus rapide de l'appareil - après tout, la plupart des paramètres ici sont déterminés automatiquement, sans avoir besoin d'une saisie manuelle.
Démarrage sous-tension
Au moment d'un tel démarrage, le courant traversant le moteur est égal au courant dans le cas d'un rotor bloqué. Le moteur accélère à ce moment et le moment devient à un moment donné supérieur à la valeur nominale, après quoi il atteint la valeur nominale. La nature du changement de courant et de couple dépend de la conception et du modèle de chaque moteur particulier.
Il convient de noter que le processus de démarrage des moteurs de différents modèles, mais ayant les mêmes caractéristiques, peut être très différent. Le courant de démarrage peut être compris entre 500 % et 700 % de la valeur nominale et le couple peut être compris entre 70 % et 230 % !
De telles caractéristiques constituent un obstacle sérieux au travail de cette espèce. démarreurs progressifs pour moteurs asynchrones. Par conséquent, si votre tâche consiste à obtenir un couple de démarrage élevé avec un courant de démarrage minimum, vous devez sélectionner les moteurs appropriés.
Le couple de démarrage du moteur a une dépendance quadratique de l'intensité du courant, comme déjà indiqué.
Il faut rappeler que la réduction de courant doit être limitée : si le couple de démarrage devient inférieur au couple de charge, l'accélération s'arrête et le moteur n'atteint pas la vitesse nominale.
Démarreurs delta/étoile
Bien que les démarreurs de ce type soient le type le plus courant démarreurs progressifs, schéma triangle/étoile ne permet pas de travailler sous de lourdes charges.
Tout d'abord, au démarrage, le moteur est connecté "en étoile", et la valeur de couple et de courant est égale au tiers de la valeur nominale. À la fin de l'intervalle spécifié, le lecteur s'éteint et se rallume, mais déjà selon le schéma "triangle".
Le démarrage sera efficace si, lors de l'accélération en étoile, le moteur peut développer le couple nécessaire pour gagner suffisamment de vitesse pour passer en delta. Si cela se produit à une vitesse bien inférieure à celle nominale, le courant lors d'un tel démarrage ne différera pas de manière significative du courant de démarrage direct, ce qui signifie que l'utilisation de l'appareil n'a aucun sens.
En plus des surtensions explosives de courant et de couple, d'autres processus transitoires complexes se produisent au moment où le moteur passe en mode delta. Leur amplitude dépend de l'amplitude et de la phase de la tension créée par le moteur lors de la commutation.
Dans le pire des cas, la tension peut être la même que dans le réseau, mais être en opposition de phase. Ensuite, le courant dépassera la valeur nominale deux fois et le moment, selon la formule ci-dessus, quatre fois.
Démarreurs avec autotransformateur
Dans la conception de tels démarreurs, un autotransformateur est utilisé pour réduire la tension fournie au moteur. Pour la régulation progressive du courant de démarrage et du couple, des prises spéciales sont utilisées. La pleine vitesse de rotation de l'arbre du moteur est atteinte jusqu'au moment de la transition vers la tension nominale et les surtensions sont minimisées. Dans le même temps, en raison de la nature progressive de la réglementation, il est impossible d'atteindre des taux de précision élevés.
Un démarreur avec autotransformateur, contrairement au précédent (triangle/étoile), se caractérise par des transitoires fermés. Cela signifie qu'il n'y a pas de transitoires durs dans les courbes de couple et de courant pendant l'accélération du moteur.
En raison de la chute de tension aux bornes de l'autotransformateur, le couple diminue à n'importe quelle vitesse du moteur. Avec une charge d'inertie élevée du variateur, le temps de démarrage peut dépasser les limites autorisées (de sécurité) et avec une charge variable, le comportement du système devient sous-optimal.
Les démarreurs avec autotransformateur sont généralement utilisés à une fréquence de démarrages allant jusqu'à 3 pcs / heure. , conçus pour des démarrages plus fréquents ou pour une charge plus forte, sont plus gros et beaucoup plus chers.
Démarreurs avec résistances intégrées dans le circuit du stator
De tels démarreurs utilisent des résistances liquides ou métalliques pour réduire la tension appliquée au stator. Avec le bon choix de résistances, de tels dispositifs permettent une bonne réduction du couple et du courant de démarrage du moteur.
Le choix exact des résistances doit être fait au stade de la conception, en tenant compte de tous les paramètres du moteur, de ses modes de fonctionnement et de la charge prévue. Cependant, de telles informations ne sont pas toujours disponibles, et lorsque les résistances sont choisies de manière imprécise, la qualité et la fiabilité du démarreur restent faibles.
La particularité d'un tel circuit est que la résistance des résistances change pendant le fonctionnement en raison de leur échauffement. En raison du risque de surchauffe, les démarreurs à résistances ne sont pas utilisés pour travailler avec des machines et des mécanismes à forte inertie.
Démarreurs progressifs pour moteurs asynchrones
Les démarreurs progressifs (démarreurs progressifs à thyristor) sont les dispositifs électroniques les plus avancés techniquement utilisés pour le démarrage/l'arrêt progressif des moteurs électriques. Le principe de fonctionnement est de contrôler la tension entrante. La tâche principale est de contrôler le courant de démarrage et le couple, cependant, moderne schémas de démarrage progressif ont de nombreuses fonctions d'interface et offrent également une protection complète du moteur.
Les principales fonctions du SCP :
La capacité de modifier en douceur et en continu la tension et le courant ;
Capacité de contrôler le courant et le couple en créant des programmes simples ;
Arrêt progressif avec freinage progressif dans les systèmes où cela peut être nécessaire (convoyeurs, pompes, etc.) ;
Assurer des démarrages et des arrêts fréquents sans modifier les caractéristiques du système ;
Optimisation des flux de travail même dans les systèmes avec des charges variables.
L'utilisation de SCP vous permet de :
Éliminer les courants de choc dans le réseau d'alimentation et HELL lors de son démarrage ;
réduire les courants de démarrage dans AD ;
éliminer les effets de choc mécanique sur l'IM et le mécanisme d'entraînement ;
réduire les effets thermiques sur la tension artérielle ;
supprimer la surtension lors de l'arrêt de la pression artérielle ;
réduire le temps de dépannage ;
pour augmenter la fiabilité de fonctionnement et la durée de vie de l'IM.
Le démarreur progressif est un régulateur de tension à thyristor (TRN)
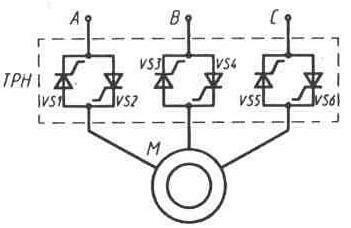
Dans le régulateur de tension, deux thyristors sont connectés en anti-parallèle à chaque fil de phase, dont l'un fonctionne conditionnellement dans le demi-cycle positif de la tension secteur et l'autre dans le demi-cycle négatif. La régulation de tension en sortie du régulateur s'effectue en modifiant le temps d'amorçage de chaque thyristor par rapport au moment où le courant doit passer d'un des trois thyristors à l'autre (point de base), en appliquant une impulsion de commande sur le thyristor, qui permet de modifier le temps de passage du courant dans le thyristor pendant l'alternance de tension du réseau et la tension à sa sortie, fournie à la charge, en l'occurrence au moteur. Cette tension n'est pas sinusoïdale et peut être représentée comme une tension moyenne, qui peut être modifiée en modifiant la durée du thyristor pendant un demi-cycle. Le temps d'amorçage du thyristor par rapport au point de base est exprimé en degrés et est appelé angle de commande. En modifiant l'angle de régulation des thyristors, il est possible d'obtenir la tension nécessaire pour un démarrage en douceur du moteur.
À la fin du processus de démarrage, les thyristors sont transférés en mode marche permanente ou peuvent être shuntés par un contacteur spécial. L'utilisation d'un contacteur de dérivation vous permet d'augmenter l'efficacité de l'appareil, d'augmenter la durée de vie des thyristors et d'éliminer l'influence des éléments semi-conducteurs sur le réseau.
FONCTIONS DE PROTECTION
En plus des fonctions de commande pour les modes de démarrage et d'arrêt, les dispositifs convertisseurs à thyristor (TPU) sont équipés des fonctions de protection de l'IM et de protection du TPU contre les modes d'urgence. Les fonctionnalités standard incluent :
protection contre les courts-circuits à la sortie du TPU ;
protection contre le blocage de l'arbre moteur au démarrage ;
protection contre les surcharges de courant en mode de fonctionnement ;
protection contre les chutes de tension inacceptables à l'entrée du TPU ;
protection contre une augmentation inacceptable de la tension à l'entrée du TPU ;
protection contre les pannes de phase ;
protection contre la non-activation du contacteur de dérivation (le cas échéant) ;
protection contre les déséquilibres de tension d'entrée ;
protection contre l'ordre inverse des phases à l'entrée ;
protection thermique du moteur ;
protection contre le claquage du thyristor de puissance ;
protection en cas de perte de contrôlabilité du thyristor.
La protection thermique du moteur nécessite un capteur de température intégré dans l'enroulement du moteur, et le système de contrôle ne prévoit que la présence du système d'entrée et de traitement correspondant. En l'absence d'un tel capteur, la protection thermique dite indirecte est réalisée, qui est basée sur l'un ou l'autre modèle thermique du moteur, qui est mis dans le logiciel du microcontrôleur par le constructeur.
En plus des fonctions envisagées, certains constructeurs intègrent des capteurs de résistance d'isolement en TPU et la possibilité de sécher le bobinage en courant continu ou alternatif.
Système de contrôle
La partie interface du système de contrôle contient, en règle générale, deux parties : l'interface opérateur et l'interface équipement.
L'interface opérateur est généralement réalisée sur la base d'un écran à cristaux liquides (LCD) et d'un clavier situés sur le panneau avant de l'appareil. L'écran LCD et le clavier sont utilisés pour programmer l'appareil, et l'écran LCD affiche des informations sur les modes de fonctionnement de l'appareil. Un certain nombre de fabricants d'appareils à faible coût et à faible consommation implémentent une interface opérateur basée sur une indication LED et des micro-interrupteurs (cavaliers réglables).
L'interface de l'équipement suppose un système développé pour entrer des signaux de commande et émettre des signaux sur l'état de l'appareil. Ainsi, les commandes de démarrage/arrêt peuvent être reçues sous la forme de niveaux de tension, de signaux de courant unifiés ou de signaux de contact sec. Les derniers modèles d'appareils contiennent des canaux de communication série basés sur les bus RS-232, RS-432, CAN, à travers lesquels l'appareil peut être programmé, ainsi que le réglage des commandes de démarrage / arrêt et la lecture d'informations sur le mode de fonctionnement. Le nombre total de signaux d'entrée et de sortie peut atteindre 15 à 20 canaux.
Fabricants
Actuellement, les TPU sont produits par des fabricants mondiaux tels qu'ABB, Siemens, Emotron AB, Softtronic, Telemecanique, Ansaldo et plusieurs autres. Les entreprises russes ont également maîtrisé la production de TPU. La plupart des entreprises produisent du TPU sous la forme d'un monobloc, qui abrite l'unité de puissance, le système de contrôle et les éléments auxiliaires. Il convient de noter que la plupart des appareils étrangers ne comprennent pas de contacteur de dérivation et que le système de contrôle ne fournit que des éléments de contrôle pour un contacteur externe.
Par exemple TPU domestique Le TPU4K peut être piloté à une puissance de 55 à 160 kW. Il est construit selon le schéma classique, possède un contacteur de dérivation intégré et utilise un microcontrôleur Atmel comme cœur du système de contrôle. L'interface de l'opérateur est combinée, comprenant un écran LCD, un clavier connecté pour le moment de la saisie des paramètres et un certain nombre de potentiomètres qui définissent les paramètres actuels pour différents modes de fonctionnement. Le TPU a les fonctions de protection suivantes : contre un court-circuit permanent à la sortie du TPU ; du blocage de l'arbre du moteur lors du démarrage ; contre la surcharge de courant en mode de fonctionnement ; d'un défaut de phase ; de ne pas activer le contacteur de dérivation ; protection thermique du moteur.
Lorsqu'une protection est déclenchée, le TPU élabore la procédure d'arrêt du moteur selon un algorithme optimisé pour un type de conduite particulier. Le TPU est rendu invariant par rapport à la séquence de phase à l'entrée, il n'a donc pas besoin de protection contre un phasage incorrect du réseau d'alimentation. Parmi les fonctions de service, il convient de noter qu'il existe une sortie signalant l'achèvement sans problème du processus de démarrage.
Une grande variété de dispositifs de démarrage de différents fabricants, ayant à peu près les mêmes caractéristiques techniques, nous oblige à prêter attention aux caractéristiques de coût, de fonctionnement et "d'utilisateur".
Il est à noter que les produits des fabricants nationaux sont nettement moins chers que les étrangers. De plus, certains fabricants nationaux, contrairement aux fabricants étrangers, incluent dans le prix de l'appareil les coûts de mise en service, d'adaptation du produit à un entraînement spécifique et d'optimisation de ses caractéristiques par rapport à un mécanisme spécifique. La présence d'un microcontrôleur permet aux fabricants nationaux individuels d'adapter rapidement les algorithmes et les paramètres aux exigences d'un client particulier et d'un type de lecteur particulier, tandis que les représentants des entreprises occidentales ne fournissent pas de tels services.
Exemples de SCP :
1) Démarreur progressif SIRIUS 3RW40 avec fonctions intégrées :
Protection moteur à semi-conducteurs et propre protection contre les surcharges de l'appareil
Limitation de courant réglable pour le démarrage et l'arrêt en douceur des moteurs asynchrones triphasés
Plage de puissance nominale de 75 à 250 kW (à 400 V)
Domaines d'utilisation :
Ventilateurs, pompes, équipements de construction, presses, escaliers mécaniques, systèmes de climatisation, systèmes de transport, chaînes de montage, compresseurs et 
refroidisseurs, actionneurs.
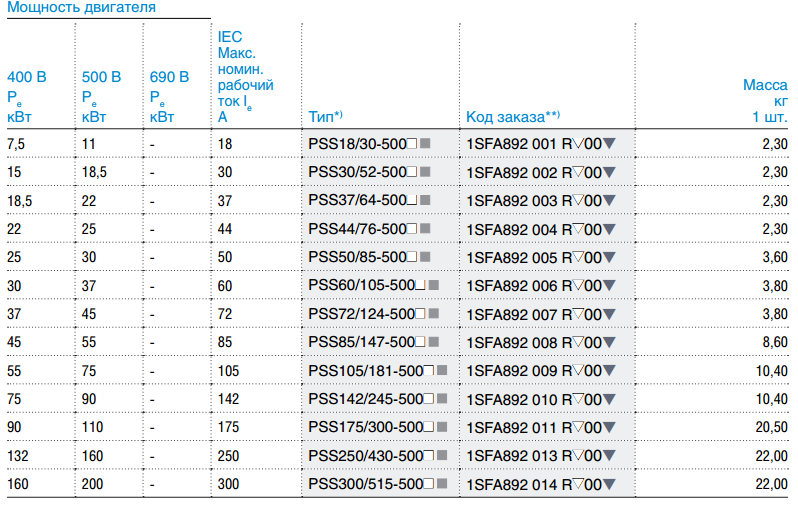
2) Le démarreur progressif PSS est une série universelle. Cabinet ABB

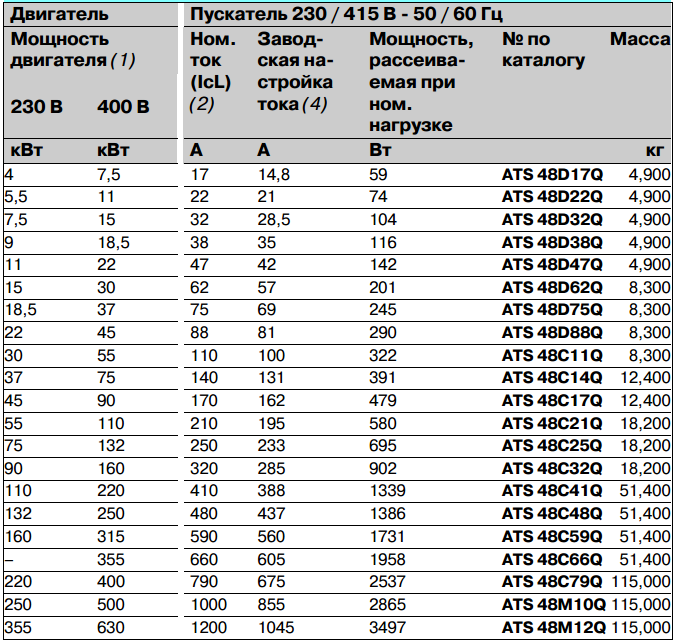
3) Démarreurs progressifs et freins Altistart 48. Schneider Electric