Qu'est-ce qu'un moteur à induction à cage d'écureuil. Moteurs asynchrones
Voiture électrique, transformant énergie électrique courant alternatif en énergie mécanique sont appelés moteurs à courant alternatif.
Dans l'industrie, la plus répandue moteurs asynchrones courant triphasé.Considérons le dispositif et le principe de fonctionnement de ces moteurs.
Le principe de fonctionnement d'un moteur asynchrone repose sur l'utilisation d'un moteur tournant champ magnétique.
Pour comprendre le fonctionnement d'un tel moteur, nous allons faire l'expérience suivante.
Nous fixons l'aimant en fer à cheval sur l'axe afin qu'il puisse être tourné par la poignée. Entre les pôles de l'aimant on place sur l'axe un cylindre de cuivre qui peut tourner librement.
Figure 1. Le modèle le plus simple pour obtenir un champ magnétique tournant
Commençons à faire tourner l'aimant par la poignée dans le sens des aiguilles d'une montre. Le champ de l'aimant commencera également à tourner et, pendant la rotation, traversera le cylindre de cuivre avec ses lignes de force. Dans le cylindre, selon la loi de l'induction électromagnétique, des courants de Foucault apparaîtront, ce qui créera leur propre champ magnétique - le champ du cylindre. Ce champ interagira avec le champ magnétique de l'aimant permanent, faisant tourner le cylindre dans le même sens que l'aimant.
Il a été établi que la vitesse de rotation du cylindre est légèrement inférieure à la vitesse de rotation du champ magnétique.
En effet, si le cylindre tourne à la même vitesse que le champ magnétique, alors les lignes de force magnétiques ne le traversent pas, et donc, les courants de Foucault n'y apparaissent pas, provoquant la rotation du cylindre.
La vitesse de rotation du champ magnétique est généralement appelée synchrone, car elle est égale à la vitesse de rotation de l'aimant, et la vitesse de rotation du cylindre est appelée asynchrone (non synchrone). Par conséquent, le moteur lui-même s'appelait un moteur à induction. La vitesse de rotation du cylindre (rotor) diffère de la vitesse de rotation synchrone du champ magnétique d'une petite quantité, appelée glissement.
En indiquant la vitesse de rotation du rotor à travers n1 et la vitesse de rotation du champ à travers n, nous pouvons calculer la quantité de glissement en pourcentage en utilisant la formule :
s = (n - n1) / n.
Dans l'expérience ci-dessus, nous avons obtenu un champ magnétique tournant et la rotation du cylindre provoquée par celui-ci en raison de la rotation d'un aimant permanent, donc un tel dispositif n'est pas encore un moteur électrique. Je dois forcer électricité créer un champ magnétique rotatif et l'utiliser pour faire tourner le rotor. Cette tâche a été brillamment résolue par M. O. Dolivo-Dobrovolsky en son temps. Il a suggéré d'utiliser un courant triphasé à cette fin.
Le dispositif d'un moteur électrique asynchrone M. O. Dolivo-Dobrovolsky
Figure 2. Schéma d'un moteur électrique asynchrone Dolivo-Dobrovolsky
Trois enroulements sont placés sur les pôles d'un noyau de fer annulaire, appelé stator d'un moteur électrique, des réseaux de courant triphasés 0 situés les uns par rapport aux autres selon un angle de 120°.
A l'intérieur du noyau, un cylindre métallique est fixé sur l'axe, appelé rotor du moteur électrique.
Si les enroulements sont connectés les uns aux autres comme indiqué sur la figure et connectés à un réseau de courant triphasé, le flux magnétique total créé par les trois pôles se révélera rotatif.
La figure 3 montre un graphique des changements de courants dans les enroulements du moteur et le processus d'émergence d'un champ magnétique tournant.
Examinons de plus près ce processus.
Figure 3. Obtention d'un champ magnétique tournant
En position "A" sur le graphique, le courant dans la première phase est nul, dans la deuxième phase il est négatif et dans la troisième phase il est positif. Le courant à travers les bobines polaires circulera dans la direction indiquée par les flèches sur la figure.
Après avoir déterminé par la règle de droite le sens du flux magnétique créé par le courant, on s'assurera que le pôle sud (S) sera créé à l'extrémité intérieure du pôle (face au rotor) de la troisième bobine, et le pôle nord (C) sera créé au pôle de la deuxième bobine. Le flux magnétique total sera dirigé du pôle de la deuxième bobine à travers le rotor vers le pôle de la troisième bobine.
En position "B" sur le graphique, le courant dans la deuxième phase est nul, dans la première phase il est positif et dans la troisième phase il est négatif. Le courant circulant dans les bobines polaires crée un pôle sud (S) à l'extrémité de la première bobine et un pôle nord (C) à l'extrémité de la troisième bobine. Le flux magnétique total sera maintenant dirigé du troisième pôle à travers le rotor vers le premier pôle, c'est-à-dire que les pôles se déplaceront de 120°.
En position "B" sur le graphique, le courant dans la troisième phase est nul, dans la deuxième phase il est positif et dans la première phase il est négatif. Maintenant, le courant traversant les première et deuxième bobines créera un pôle nord (C) à l'extrémité du pôle de la première bobine, et un pôle sud (S) à l'extrémité du pôle de la deuxième bobine, c'est-à-dire la polarité du champ magnétique total se déplacera encore de 120°. En position "G" sur le graphique, le champ magnétique se déplacera encore de 120°.
Ainsi, le flux magnétique total changera de direction avec un changement de direction du courant dans les enroulements du stator (pôles).
Dans ce cas, dans une période de changement de courant dans les enroulements, le flux magnétique fera un tour complet. Le flux magnétique rotatif entraînera le cylindre avec lui, et de cette façon nous obtiendrons moteur électrique asynchrone.
Rappelons que sur la figure 3 les enroulements du stator sont reliés par une « étoile », cependant, un champ magnétique tournant se forme également lorsqu'ils sont reliés par un « triangle ».
Si nous échangeons les enroulements des deuxième et troisième phases, le flux magnétique changera le sens de sa rotation dans le sens opposé.
Le même résultat peut être obtenu sans permuter les enroulements du stator, mais en dirigeant le courant de la deuxième phase du réseau dans la troisième phase du stator, et la troisième phase du réseau dans la deuxième phase du stator.
Ainsi, le sens de rotation du champ magnétique peut être modifié en commutant deux phases quelconques.
Nous avons considéré le dispositif d'un moteur asynchrone à trois enroulements sur le stator. Dans ce cas, le champ magnétique tournant est bipolaire et le nombre de ses tours en une seconde est égal au nombre de périodes de changement de courant en une seconde.
Si six enroulements sont placés autour de la circonférence du stator, un champ magnétique rotatif à quatre pôles sera créé. Avec neuf enroulements, le champ sera à six pôles.
Avec une fréquence de courant triphasé f égale à 50 périodes par seconde, soit 3000 par minute, le nombre de tours n du champ tournant par minute sera :
avec un stator bipolaire n \u003d (50 x 60) / 1 \u003d 3000 tr/min,
avec un stator à quatre pôles n \u003d (50 x 60) / 2 \u003d 1500 tr/min,
avec un stator à six pôles n \u003d (50 x 60) / 3 \u003d 1000 tr/min,
avec le nombre de paires de pôles statoriques égal à p : n = (f x 60) / p,
Ainsi, nous avons établi la vitesse de rotation du champ magnétique et sa dépendance au nombre d'enroulements sur le stator du moteur.
Le rotor du moteur aura, comme nous le savons, un peu de retard dans sa rotation.
Cependant, le décalage du rotor est très faible. Ainsi, par exemple, lorsque tourner au ralenti moteur, la différence de vitesse n'est que de 3% et à une charge de 5 à 7%. Par conséquent, la vitesse d'un moteur à induction change dans de très petites limites lorsque la charge change, ce qui est l'un de ses avantages.
Considérons maintenant le dispositif des moteurs électriques asynchrones
Le stator d'un moteur électrique asynchrone moderne a des pôles inexprimés, c'est-à-dire que la surface intérieure du stator est rendue complètement lisse.
Pour réduire les pertes par courants de Foucault, le noyau du stator est constitué de fines tôles d'acier embouties. Le noyau du stator assemblé est fixé dans un boîtier en acier.
Un enroulement de fil de cuivre est posé dans les encoches du stator. Les enroulements de phase du stator du moteur électrique sont reliés par une "étoile" ou un "triangle", pour lequel tous les débuts et extrémités des enroulements sont amenés au boîtier - à un blindage isolant spécial. Un tel dispositif de stator est très pratique, car il vous permet d'activer ses enroulements pour différentes tensions standard.
Le rotor d'un moteur à induction, comme le stator, est assemblé à partir de tôles d'acier embouties. L'enroulement est posé dans les rainures du rotor.
Selon la conception du rotor, les moteurs électriques asynchrones sont divisés en moteurs à rotor à cage d'écureuil et à rotor de phase.
Le bobinage du rotor à cage d'écureuil est constitué de tiges de cuivre placées dans les rainures du rotor. Les extrémités des tiges sont reliées par un anneau de cuivre. Un tel bobinage est appelé bobinage "cage d'écureuil". Notez que les tiges de cuivre dans les rainures ne sont pas isolées.
Dans certains moteurs, la "cage d'écureuil" est remplacée par un rotor coulé.
Un moteur asynchrone à rotor de phase (avec bagues collectrices) est généralement utilisé dans les moteurs électriques de forte puissance et dans ces cas; lorsqu'il est nécessaire que le moteur électrique génère une force importante au démarrage. Ceci est réalisé par le fait que dans les enroulements moteur à phases le rhéostat de démarrage est activé.
Les moteurs à induction à cage d'écureuil sont démarrés de deux manières :
1) Connexion directe tension triphasée réseau au stator du moteur. Cette méthode est la plus simple et la plus populaire.
2) Réduire la tension fournie aux enroulements du stator. La tension est réduite, par exemple, en commutant les enroulements du stator d'étoile en triangle.
Le moteur est démarré lorsque les enroulements du stator sont connectés avec une étoile, et lorsque le rotor atteint la vitesse normale, les enroulements du stator passent en connexion en triangle.
Le courant dans les fils d'alimentation avec cette méthode de démarrage du moteur est réduit de 3 fois par rapport au courant qui se produirait lors du démarrage du moteur par connexion directe au réseau avec les enroulements du stator connectés par un "triangle". Cependant, cette méthode ne convient que si le stator est conçu pour un fonctionnement normal lorsque ses enroulements sont connectés en "triangle".
Le plus simple, le moins cher et le plus fiable est un moteur électrique asynchrone avec un rotor à cage d'écureuil, mais ce moteur présente certains inconvénients - faible force de démarrage et courant de démarrage élevé. Ces inconvénients sont en grande partie éliminés par l'utilisation d'un rotor de phase, mais l'utilisation d'un tel rotor augmente considérablement le coût du moteur et nécessite un rhéostat de démarrage.
Principe de fonctionnement
Le principe de fonctionnement d'un moteur électrique asynchrone repose sur l'interaction du courant induit du rotor avec le flux magnétique du stator. Lors de la mise en marche du bobinage moteur triphasé sous la tension d'une source de courant alternatif triphasé, il se forme à l'intérieur de l'alésage du stator un champ magnétique tournant dont la fréquence de rotation est égale à
n1=60fp
où n1 est la fréquence de rotation du champ magnétique, tr/min ; f - fréquence actuelle, Hz; p est le nombre de paires de pôles magnétiques du moteur.
Les lignes de force du champ magnétique tournant traversent les tiges de l'enroulement court-circuité du rotor et une FEM y est induite, ce qui provoque l'apparition de courant et de flux magnétique dans le rotor du moteur.
L'interaction du champ magnétique du stator avec le flux magnétique du rotor crée un couple mécanique sous l'influence duquel le rotor commence à tourner. La vitesse du rotor est légèrement inférieure à la vitesse du champ magnétique. Par conséquent, le moteur est appelé asynchrone.
La valeur caractérisant le décalage du rotor par rapport au champ magnétique en unités relatives est appelée glissement, elle est calculée par la formule
S = (n1−n2)/n1,
où S - glissement (relatif vitesse angulaire); n1 - fréquence de rotation du champ magnétique, rpm; n2 - vitesse nominale du rotor, tr/min.
Pour connecter le moteur au réseau, ses enroulements statoriques doivent être connectés en "étoile" ou "triangle".
Riz. 4 Schémas de connexion :
a - triangle, b - étoile.
Pour allumer le moteur selon le schéma «triangle», vous devez connecter le début du premier enroulement à la fin du deuxième, le début du deuxième enroulement à la fin du troisième et le début du troisième au fin du premier. Les points de connexion des enroulements sont connectés à trois phases du réseau (Fig. 4, a).
Pour connecter le moteur au réseau selon le schéma «en étoile», il est nécessaire de connecter électriquement toutes les extrémités des enroulements à un point et de connecter tous les débuts des enroulements aux phases du réseau (Fig. 4 , b).
Les schémas de câblage sont toujours indiqués au verso du couvercle qui ferme la boîte à bornes du moteur.
Pour changer le sens de rotation d'un moteur asynchrone triphasé, il suffit d'intervertir deux phases quelconques du réseau, quel que soit le circuit de commutation du moteur. Pour changer rapidement le sens de rotation du moteur, des inverseurs, des commutateurs par lots ou des démarreurs magnétiques inverseurs sont utilisés.
Un moteur électrique asynchrone triphasé avec un rotor à cage d'écureuil, associé à une conception simple, une grande fiabilité de fonctionnement, une durabilité, un faible coût et une polyvalence, présente un inconvénient majeur: lors de son démarrage, un courant d'appel se produit, la valeur de lequel est 5-7 fois plus que nominal. Grand courant de démarrage réseau électrique généralement non calculé, provoque une diminution significative de la tension, ce qui, à son tour, nuit au fonctionnement stable des récepteurs électriques voisins.
Pour réduire les courants de démarrage des moteurs asynchrones triphasés à cage d'écureuil de forte puissance, ils sont allumés à l'aide d'un commutateur de circuit étoile-triangle. Dans ce cas, les enroulements du moteur sont d'abord connectés selon le schéma "étoile", puis, une fois que le rotor du moteur atteint la vitesse nominale, ses enroulements sont commutés sur le schéma "triangle".
déclin courant de démarrage moteur lors de la commutation de ses enroulements d'une étoile à un triangle se produit car au lieu du circuit "triangle" destiné à une tension de réseau donnée, chaque enroulement du moteur est allumé pour une tension √3 fois inférieure, et le courant consommé est réduit d'un facteur de trois. La puissance développée par le moteur électrique au démarrage est également réduite d'un facteur trois. Par conséquent, la méthode décrite de réduction du courant de démarrage ne peut être utilisée qu'à une charge ne dépassant pas 1/3 de la charge nominale.
Une machine asynchrone est une machine électrique à courant alternatif dont la vitesse du rotor n'est pas égale (en mode moteur inférieure) à la vitesse du champ magnétique créé par le courant d'enroulement du stator.
Dans un certain nombre de pays, les machines à collecteur sont également classées comme machines asynchrones. Le deuxième nom des machines asynchrones est l'induction en raison du fait que le courant dans l'enroulement du rotor est induit par le champ tournant du stator. Les machines asynchrones constituent aujourd'hui la majorité des machines électriques. Ils sont principalement utilisés comme moteurs électriques et sont les principaux convertisseurs d'énergie électrique en énergie mécanique.
Avantages : Facilité de fabrication Aucun contact mécanique avec la partie statique de la machine.
Inconvénients : Petit couple de démarrage Courant de démarrage important.
Une machine asynchrone a un stator et un rotor séparés par un entrefer. Ses parties actives sont des enroulements et un circuit magnétique (noyau); toutes les autres pièces sont structurelles, fournissant la résistance, la rigidité, le refroidissement, la possibilité de rotation, etc. nécessaires.
L'enroulement du stator est un enroulement triphasé (en général multiphasé), dont les conducteurs sont uniformément répartis sur la circonférence du stator et sont posés phase par phase dans des rainures avec une distance angulaire de 120 degrés el. Les phases de l'enroulement du stator sont connectées selon des schémas standard "triangle" ou "étoile" et connectées à un réseau de courant triphasé. Le circuit magnétique du stator est remagnétisé lors du changement de courant dans l'enroulement du stator, il est donc recruté à partir de plaques d'acier électriques pour assurer des pertes magnétiques minimales. La principale méthode d'assemblage du circuit magnétique dans un boîtier est le mélange.
Selon la conception du rotor, les machines asynchrones sont divisées en deux types principaux: avec un rotor à cage d'écureuil et avec un rotor à phase. Les deux types ont la même conception de stator et ne diffèrent que par la conception de l'enroulement du rotor. Le circuit magnétique du rotor est fabriqué de la même manière que le circuit magnétique du stator - à partir de plaques d'acier électriques.
Principe de fonctionnement
Une tension est appliquée aux bobinages du stator, sous l'action de laquelle un courant circule dans ces bobinages et crée un champ magnétique tournant. Le champ magnétique agit sur l'enroulement du rotor et, selon la loi de l'induction électromagnétique, y induit une FEM. Dans l'enroulement du rotor, sous l'action de la FEM induite, un courant apparaît. Le courant dans l'enroulement du rotor crée son propre champ magnétique, qui interagit avec le champ magnétique tournant du stator. En conséquence, une force agit sur chaque dent du circuit magnétique du rotor, qui, s'additionnant autour de la circonférence, crée un moment électromagnétique de rotation qui fait tourner le rotor.
Le plus répandu parmi les moteurs électriques était un moteur asynchrone triphasé, d'abord conçu par le célèbre électricien russe M. O. Dolivo-Dobrovolsky.
Le moteur asynchrone se distingue par sa conception simple et sa facilité d'entretien. Comme toute machine à courant alternatif, un moteur à induction se compose de deux parties principales ; stator et rotor. Le stator est la partie fixe de la machine, le rotor est la partie tournante. Une machine asynchrone a la propriété de la réversibilité, c'est-à-dire qu'elle peut être utilisée aussi bien en mode générateur qu'en mode moteur. En raison d'un certain nombre de lacunes importantes, les générateurs asynchrones ne sont presque jamais utilisés, tandis que les moteurs asynchrones, comme indiqué ci-dessus, sont devenus très répandus.
Par conséquent, nous considérerons le fonctionnement d'une machine asynchrone en mode moteur, c'est-à-dire le processus de conversion de l'énergie électrique en énergie mécanique.
Un enroulement alternatif polyphasé crée un champ magnétique tournant dont la vitesse de rotation par minute
Si le rotor tourne à une vitesse n2 égale à la vitesse de rotation du champ magnétique (n2=n1), alors cette vitesse est dite synchrone.
Si le rotor tourne à une vitesse non égale à la vitesse de rotation du champ magnétique ( n2n1), alors cette vitesse est dite asynchrone.
Dans un moteur asynchrone, le processus de travail ne peut se dérouler qu'à une vitesse asynchrone, c'est-à-dire à une vitesse de rotation du rotor qui n'est pas égale à la vitesse de rotation du champ magnétique.
La vitesse du rotor peut différer très peu de la vitesse du jul, mais lorsque le moteur tourne, elle sera toujours inférieure (n2 Le fonctionnement d'un moteur à induction repose sur un phénomène appelé disque d'Arago-Lenz (fig. 108). Ce phénomène est le suivant : si vous placez un disque de cuivre 1 devant les pôles d'un aimant permanent, assis librement sur l'axe 2, et que vous commencez à faire tourner l'aimant autour de son axe avec une poignée, alors le disque de cuivre tournera dans le même sens. direction. Cela s'explique par le fait que lorsque l'aimant tourne, les lignes magnétiques de son champ, se fermant du pôle nord au sud, pénètrent dans le disque et y induisent des courants de Foucault, du fait de l'interaction des courants de Foucault avec le champ magnétique champ de l'aimant, une force apparaît qui fait tourner le disque. Selon la loi de Lenz, le sens de tout courant induit est tel qu'il s'oppose à la cause qui l'a provoqué. Par conséquent, les courants de Foucault dans le corps du disque ont tendance à retarder la rotation de l'aimant, mais, ne pouvant le faire, font tourner le disque pour qu'il suive l'aimant. Dans ce cas, la vitesse de rotation du disque est toujours inférieure à la vitesse de rotation de l'aimant. Si, pour une raison quelconque, ces vitesses devenaient les mêmes, la laisse magnétique ne traverserait pas le disque et, par conséquent, il n'y aurait pas de courants de Foucault, c'est-à-dire qu'il n'y aurait pas de force sous l'influence de laquelle le disque tourne. Dans les moteurs asynchrones, un aimant permanent est remplacé par un champ magnétique tournant créé par un enroulement triphasé du stator lorsqu'il est connecté à un réseau de courant alternatif. Le champ magnétique tournant du stator traverse les conducteurs de l'enroulement du rotor et y induit une fem. Avec. Si l'enroulement du rotor est fermé à toute résistance ou en court-circuit, alors sous l'influence de e induite. d.s. flux de courant. En conséquence, un couple est créé par le champ d'enroulement du stator, sous l'influence duquel le rotor commence à tourner. Par exemple, sélectionnons une partie de la circonférence du rotor, sur laquelle se trouve un conducteur de son enroulement. Le champ statorique est représenté par le pôle nord N, qui tourne dans l'espace et autour du rotor dans le sens des aiguilles d'une montre avec un nombre de tours N par minute. Par conséquent, le pôle N se déplace par rapport au conducteur de l'enroulement du rotor de gauche à droite, à la suite de quoi une force électromotrice est induite dans ce conducteur. s, qui, selon la règle de la main droite, est dirigé vers le spectateur (le signe "point"). Si l'enroulement du rotor est fermé, alors sous l'action de e. d.s. un courant circule dans cet enroulement, dirigé dans le conducteur que nous avons choisi également vers le spectateur. En raison de l'interaction du courant dans le conducteur de l'enroulement du rotor avec le champ magnétique, une force F apparaît, qui déplace le conducteur dans la direction déterminée par la règle de la main gauche, c'est-à-dire de gauche à droite. Avec le conducteur, le rotor commence également à bouger. Si la force F agissant sur le conducteur de l'enroulement du rotor est multipliée par la distance de ce conducteur à l'axe du rotor (épaulement d'application de la force), alors on obtient le couple développé par le courant de ce conducteur. Comme un grand nombre de conducteurs sont placés sur le rotor, la somme des produits des forces agissant sur chacun des conducteurs à la distance de ces conducteurs de l'axe du rotor détermine le couple développé par le moteur. Sous l'action du couple, le rotor entre en rotation dans le sens de rotation du champ magnétique. Par conséquent, pour inverser le moteur, c'est-à-dire pour changer le sens de rotation du rotor, il est nécessaire de changer le sens de rotation du champ magnétique créé par l'enroulement du stator. Ceci est réalisé en modifiant la séquence de phase des enroulements du stator ; pour lequel il est nécessaire d'intervertir deux quelconques des trois fils reliant l'enroulement du stator au réseau par rapport aux bornes du réseau. Les moteurs réversibles sont équipés d'interrupteurs avec lesquels vous pouvez modifier l'ordre des phases des enroulements du stator, et donc le sens de rotation du rotor. Quel que soit le sens de rotation du rotor, sa vitesse n2, comme déjà mentionné, est toujours inférieure à la vitesse du champ magnétique statorique. Si nous supposons qu'à un moment donné, le nombre de tours du rotor s'est avéré être égal au nombre de tours du champ du stator, alors les conducteurs de l'enroulement du rotor ne croiseront pas les lignes magnétiques du champ du stator et là n'y aura pas de courant dans le rotor. Dans ce cas, le couple deviendra égal à zéro, la vitesse de rotation du rotor diminuera par rapport à la vitesse de rotation du champ statorique, jusqu'à ce qu'apparaisse un couple qui équilibre le couple de freinage qui est la somme des moments ; charge sur l'arbre et le moment des forces de frottement dans la machine. Le plus populaire des moteurs électriques existants reste le moteur asynchrone, créé au XIXe siècle. Sa conception s'est avérée ingénieusement simple et si réussie que toutes les transformations ultérieures ne concernaient pas le principe de fonctionnement, n'affectant que la technologie de fabrication de certaines pièces. Par exemple, les roulements sur lesquels l'arbre du moteur était fixé pouvaient être modifiés, la forme des enroulements du rotor et du stator changée, mais le principe de fonctionnement d'un moteur asynchrone restait le même. Quelles que soient les dimensions de ce type de moteur électrique, son dispositif sera le même. Il est plus facile de prendre comme exemple moteur électrique triphasé. De tels moteurs fonctionnent dans les usines - sur le convoyeur et dans les machines-outils, mettent la cabine d'ascenseur en mouvement - dans les maisons et les mines, pompent l'eau en faisant tourner la turbine de la pompe - à la fois dans un petit puits et dans de puissantes stations de prise d'eau. La portée des appareils triphasés est large. Le premier à naître était un moteur électrique triphasé, dont le principe de fonctionnement a été construit sur l'interaction des champs électromagnétiques. Les pièces principales d'un moteur à induction sont le stator et le rotor. En conséquence, la partie qui reste immobile s'appelait le stator. C'est elle qui est située directement sous la coque extérieure de l'appareil et a la forme d'un cylindre. Dans cette partie, trois enroulements sont situés en cercle - à un angle de 120 ° les uns par rapport aux autres. Dans les moteurs modernes, de nombreux enroulements peuvent être comptés, cependant, ils sont connectés les uns aux autres de sorte que chacun successif diffère du précédent en phase, et le déphasage entre les enroulements adjacents est de 120 °. Les enroulements sont enroulés avec du fil de cuivre et la tension de sa phase est connectée à chacun des groupes. Ainsi, il s'avère que le champ magnétique se déplace le long de ces enroulements, comme s'il se fermait en anneau. Le stator a également ses propres enroulements. Étant donné que l'électricité n'est pas fournie au stator, il a le droit de conducteur fermé, qui est parfois formé sous la forme d'une cage dite d'écureuil au lieu d'enroulements. Pour être plus précis, ce détail ne ressemble pas à la cage elle-même pour un rongeur agile, mais à une roue d'écureuil, conçue pour que l'animal éclabousse son énergie irrépressible. Dans le rotor de l'appareil, la "cage d'écureuil" est formée en versant de l'aluminium en fusion dans les rainures du noyau, constitué de tôles d'acier typées. Un tel dispositif est appelé rotor à cage d'écureuil. Si le stator est fabriqué avec de vrais enroulements, il est généralement multipolaire. Un tel rotor est appelé rotor de phase. Les enroulements de ce rotor sont fermés par une étoile ou un triangle. Le rotor a son propre arbre, qui est supporté par des roulements arrière et avant. Eux, à leur tour, attaché au carter du moteur afin que le rotor à l'intérieur du stator puisse tourner librement. Le principe de fonctionnement des moteurs asynchrones repose sur le fait qu'un champ magnétique est induit dans les bobinages ou la « roue d'écureuil » par le stator. Sous son action, un courant apparaît dans les conducteurs du rotor, et avec lui, son propre champ magnétique. Le champ magnétique alternatif du stator entraîne le rotor avec lui et il commence à tourner. Mais le champ magnétique du rotor est toujours en retard par rapport au champ du stator, et la rotation des deux champs ne peut pas se produire de manière synchrone. Cela oblige le rotor à surmonter de nombreuses forces agissant sur lui : Cette dernière force dépend de nombreux moments, elle ne peut donc pas être réduite à un simple paramètre physique. Si vous devez déplacer le tramway, le moteur doit prendre le relais charge d'engrenage, qui doit être détordu, de la voiture elle-même, qui doit être déplacée, de plus, il ne faut pas oublier la force de frottement de roulement que subissent les roues du véhicule. Dans le cas où il y a une description du travail d'un hachoir à viande professionnel, qui est entraîné par un moteur asynchrone, alors la résistance de la boîte de vitesses elle-même, et ce morceau de viande ou même d'os qui doit être broyé, est surmonté ici . Puisqu'il y a un espace entre le stator et le rotor, le rotor sous charge est simplement en retard sur le stator en termes de vitesse angulaire. Par conséquent, la vitesse du rotor dépend de la charge sur l'arbre du moteur. Le principe de synchronisme est violé, d'où le nom de l'appareil lui-même : « moteur asynchrone ». Le principe de fonctionnement embarqué dans le moteur asynchrone donne un certain nombre d'avantages cet appareil: Les moteurs électriques de cette conception ont également leurs inconvénients. Ceux-ci incluent les pertes de chaleur. Ils ont vraiment peut surchauffer surtout sous charge. Pour ce faire, leurs boîtiers sont souvent nervurés - afin qu'ils rayonnent mieux la chaleur dans l'espace environnant. De plus, un appareil asynchrone est souvent équipé d'un ventilateur assis sur le même arbre pour souffler le rotor, car le boîtier ne peut évacuer la chaleur que du stator, car il n'y a pas d'entrefer entre eux, ce qui ne peut pas être dit à propos du rotor. L'incapacité à maintenir la vitesse de rotation stable rend le moteur asynchrone inapplicable dans certains appareils. Le stator a deux enroulements avec un angle de 90° entre eux. Les deux groupes de bobines sont connectés à la même phase, cependant, pour assurer le même décalage de 90° entre les enroulements, l'un d'eux est connecté via un condensateur. Cela provoque la rotation du champ magnétique. Des moteurs similaires sont utilisés, par exemple, dans les moulins à café ou les presse-agrumes. Tu peux l'entendre changer bruit du moteur à induction dans ces appareils lorsqu'ils sont sous charge. Au ralenti, la vitesse du rotor est nettement plus élevée. En résumé, il est important de dire que les moteurs électriques asynchrones ont acquis une grande popularité. Bien sûr, nous ne devons pas oublier certaines des lacunes. Cependant, ils se chevauchent tous en raison de nombreux avantages.
Les moteurs asynchrones sont appelés moteurs dans lesquels la vitesse du rotor est en retard par rapport à la vitesse du champ magnétique du stator lorsqu'un courant triphasé traverse ses enroulements. Lorsqu'un courant triphasé traverse les enroulements du stator d'une machine triphasée, un champ magnétique tournant apparaît, sous l'influence duquel un courant électrique est induit dans le rotor. En raison de l'interaction du champ magnétique tournant du stator avec les courants induits dans les conducteurs du rotor, une force mécanique apparaît qui agit sur le conducteur porteur de courant, ce qui crée un couple qui met le rotor en mouvement. Dans le même temps, la vitesse du rotor d'un moteur asynchrone est toujours inférieure à la vitesse du champ magnétique tournant du stator en raison du glissement du rotor, qui pour les moteurs modernes est d'environ 2 à 5 %. Ainsi, un moteur à induction reçoit de l'énergie fournie au rotor par un flux magnétique tournant (par induction), contrairement aux moteurs à courant continu, dans lesquels l'énergie est fournie par des fils. Les moteurs asynchrones, contrairement aux moteurs synchrones, sont excités par un courant alternatif. Un moteur asynchrone, comme un moteur synchrone, se compose de deux parties principales: un stator avec des enroulements de phase traversés par un courant alternatif triphasé et un rotor dont l'axe est posé dans des paliers. Le rotor peut être court-circuité et mis en phase (Fig. 170). Rotor à cage d'écureuil (Fig. 170, dans) représente un cylindre le long de la circonférence duquel sont situés des conducteurs parallèles à son axe, fermés les uns aux autres de part et d'autre du rotor par des anneaux (en forme de roue d'écureuil). Un moteur asynchrone avec un tel rotor est appelé moteur à cage d'écureuil. Ses inconvénients incluent: un faible couple de démarrage et un courant élevé dans les enroulements du stator lors du démarrage. S'ils veulent augmenter le couple de démarrage ou réduire le courant de démarrage, ils utilisent des moteurs asynchrones à rotor de phase (Fig. 170, G). Ces moteurs ont le même enroulement sur le rotor que sur le stator. Dans ce cas, les extrémités des enroulements sont reliées à des bagues collectrices (Fig. 170, e) situé sur l'arbre du moteur. Les anneaux de contact sont reliés au rhéostat de démarrage à l'aide de balais. Pour démarrer le moteur, un stator est inclus dans le circuit d'alimentation, après quoi la résistance du rhéostat de démarrage est progressivement retirée du circuit du rotor. Au démarrage du moteur, les bagues de contact sont court-circuitées par les contacts du démarreur, Coupe longitudinale d'un moteur électrique asynchrone à rotor de phase Sur la fig. 171 montre une coupe longitudinale d'un moteur à induction avec un rotor de phase. Au cas où 6
l'enroulement de stator 5 est placé, posé dans des rainures 4
acier du stator. dans les rainures 2
le rotor en acier est enroulé 3
rotor. Le démarrage d'un moteur électrique à rotor à cage d'écureuil peut être effectué en allumant directement le démarreur à la pleine tension de fonctionnement du circuit (méthode de démarrage direct). Cependant, en raison d'une forte augmentation du e induit. d.s. et courant de démarrage, la tension dans la cible au moment du démarrage diminue, ce qui nuit au fonctionnement du moteur d'entraînement et des autres consommateurs alimentés par ce circuit. Dans le cas d'un courant de démarrage important, pour le réduire, les moteurs asynchrones à rotor à cage d'écureuil sont généralement démarrés de deux manières: en commutant les enroulements du stator au moment du démarrage d'une étoile à un triangle, si les enroulements du stator sont connecté en triangle pendant le fonctionnement normal du moteur électrique, ou en allumant le moteur électrique via un rhéostat de démarrage (ou autotransformateur) dans les circuits du stator. Le moteur est arrêté en désactivant le contacteur. Après l'arrêt du moteur, le rhéostat de démarrage ou l'autotransformateur est complètement engagé. La vitesse de rotation des moteurs asynchrones est régulée en modifiant la résistance du rhéostat inclus dans le circuit du rotor (pour les moteurs électriques à rotor de phase) et en commutant les enroulements du stator pour modifier le nombre de paires de pôles (pour les moteurs électriques à écureuil -cage rotorique). L'inversion du sens de rotation des moteurs à induction est obtenue en modifiant le sens du champ magnétique rotatif du stator en commutant deux des trois phases de l'enroulement du stator (à l'aide de fils reliant les pinces de l'enroulement du stator au circuit) à l'aide d'un bipolaire conventionnel changer. Les moteurs asynchrones sont de conception simple, ont des dimensions et un poids inférieurs à ceux des moteurs à courant continu, ce qui les rend beaucoup moins chers. De plus, ils sont plus fiables en fonctionnement, nécessitent moins d'attention lors de la maintenance en raison de l'absence d'un collecteur rotatif et d'un appareil à brosses; ils ont un rendement supérieur, leur équipement de contrôle est beaucoup plus simple et moins cher que celui des moteurs à courant continu. Les moteurs asynchrones fonctionnent sans étincelles, ce qui est possible dans les machines à courant continu avec commutation interrompue, ils sont donc plus sûrs en termes d'incendie. Les principaux avantages énumérés des moteurs asynchrones expliquent la tendance moderne à l'introduction généralisée du courant alternatif sur les navires. Il est à noter que dans l'industrie, les moteurs asynchrones ont depuis longtemps conquis une position dominante par rapport aux autres types de moteurs électriques. Les moteurs asynchrones sont construits avec une puissance allant de fractions de kilowatt à plusieurs milliers de kilowatts. Les navires marins utilisent principalement des moteurs asynchrones avec un rotor à cage d'écureuil, qui sont disponibles en versions étanches et anti-éclaboussures et sont évalués à 380/220 V. Question test : 1. Quel est le principe du générateur DC ? 2. Quelles sont les principales parties d'une machine électrique à courant continu et à quoi servent-elles ? 3. Comment les machines à courant continu sont-elles divisées par conception ? 4. Quel est le principe de fonctionnement du moteur à courant continu ? 5. Quelles sont les règles de base pour la maintenance des machines électriques à courant continu ? 6. Quelles machines sont appelées synchrones et quel est le principe de leur fonctionnement ? 7. A quoi servent les transformateurs, quels sont leur conception et leur principe de fonctionnement ? 8. Quels moteurs sont appelés asynchrones et quel est leur principe de fonctionnement ? 9. Comment les moteurs asynchrones sont-ils divisés selon la conception du rotor ? Le système à courant alternatif triphasé, qui a permis de créer des dispositifs d'obtention d'un flux magnétique tournant, a provoqué l'apparition du moteur électrique le plus répandu à l'heure actuelle, dit asynchrone. Ce nom est dû au fait que la partie tournante de la machine - le rotor - tourne toujours à une vitesse non égale à la vitesse du flux magnétique, c'est-à-dire désynchronisé avec lui. Fabriqué à partir de fractions de watt à des milliers de kilowatts à des tensions de 127, 220, 380, 500, 600, 3000, 6000, 10 000 V, ce moteur électrique est de conception simple, fiable en fonctionnement et bon marché par rapport aux autres types. Il est utilisé dans tous les types de travaux où il n'est pas nécessaire de maintenir une vitesse de rotation constante, ainsi que dans la vie de tous les jours, en version monophasée pour une faible puissance. Considérez le dispositif illustré à la Fig. Il se compose d'un aimant permanent 1, d'un disque de cuivre 2, d'une poignée 3 et de roulements 4. Si vous faites tourner l'aimant avec la poignée, le disque de cuivre commence à tourner dans le même sens, mais à une fréquence inférieure. Un disque de cuivre peut être vu comme un nombre innombrable de spires fermées ; lorsque l'aimant 1 tourne, ses lignes de force magnétique (m.s.l.) traversent les spires du disque, et une force électromotrice est induite dans les spires Dénoter: Dans les moteurs, un champ magnétique tournant est créé par un courant triphasé traversant l'enroulement du stator, et l'enroulement du rotor joue le rôle d'un disque. L'acier actif du stator et du rotor sert de circuit magnétique, ce qui réduit la résistance au flux magnétique de centaines de fois. 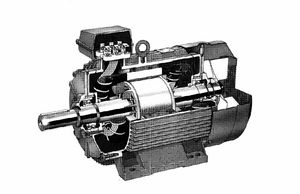
Différents types de moteur
Contrairement à un moteur triphasé, un moteur asynchrone monophasé est souvent utilisé dans les appareils électroménagers - aspirateurs, machines à laver, ventilateurs, robots culinaires, mixeurs, etc. Ils sont également utilisés dans les magnétophones et les lecteurs de disques vinyle. Même dans le cadre d'un ordinateur personnel, vous pouvez trouver plus d'un moteur asynchrone. Mais nous reviendrons sur le dispositif de cette version du moteur un peu plus tard.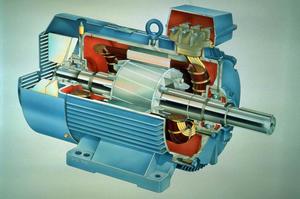
Inconvénients des moteurs à induction
Raccordement moteur monophasé
 Dans nos appareils électroménagers, on retrouve le plus souvent le même appareil asynchrone. Mais comment "comprend-il" dans quel sens il doit commencer à tourner lorsqu'il le démarre, si une seule phase et zéro sont démarrés dessus? Dans un tel moteur asynchrone, le principe de fonctionnement est le même que celui d'un moteur triphasé - rotation du champ magnétique. Pour ce faire, chaque moteur a un contact supplémentaire - démarrage.
Dans nos appareils électroménagers, on retrouve le plus souvent le même appareil asynchrone. Mais comment "comprend-il" dans quel sens il doit commencer à tourner lorsqu'il le démarre, si une seule phase et zéro sont démarrés dessus? Dans un tel moteur asynchrone, le principe de fonctionnement est le même que celui d'un moteur triphasé - rotation du champ magnétique. Pour ce faire, chaque moteur a un contact supplémentaire - démarrage.
Le principe de fonctionnement d'un moteur à induction
n, - fréquence de rotation de l'aimant (fréquence synchrone), rpm;
n2 - fréquence de rotation du disque, rpm ; n - la différence entre les fréquences de rotation de l'aimant et du disque, rpm.
La vitesse de rotation du disque est inférieure à la vitesse de rotation de l'aimant, et donc le disque tourne à une fréquence non synchrone (asynchrone). La différence entre les fréquences de l'aimant et du disque est la fréquence avec laquelle le M.S.L. traverser les tours du disque. Le rapport entre la différence de fréquence et la fréquence synchrone est appelé glissement. Le glissement peut être exprimé en fractions d'unité ou en pourcentage :
Sous l'influence de la tension secteur Ul appliquée au stator, un courant I, circule dans son enroulement. Ce courant crée un flux magnétique rotatif F, qui se ferme à travers le stator et le rotor. Le flux crée une fem dans les deux enroulements. E( et E2, comme dans les enroulements primaire et secondaire du transformateur. Ainsi, un moteur à induction est similaire à un transformateur triphasé dans lequel la force électromotrice est créée par un flux magnétique rotatif. 
Riz. 2. Fonctionnement d'un moteur asynchrone à cos f2 = 1
Laissez le flux tourner dans le sens de l'aiguille de l'horloge. Sous l'influence d'emf. E2 dans l'enroulement du rotor le courant I2 circulera, dont la direction est indiquée sur la fig. 2. Supposons qu'il soit en phase avec E2. L'interaction du courant I2 et du flux Ф crée des forces électromagnétiques F qui font tourner le rotor, suivant le flux tournant. Ainsi, un moteur asynchrone est un transformateur à enroulement secondaire tournant et est donc capable de convertir une puissance électrique E2I2 cos f en puissance mécanique.
Le rotor est toujours en retard sur le flux magnétique rotatif, car ce n'est que dans ce cas que des fem peuvent se produire. E2, et donc le courant 12 et la force F. Pour changer le sens de rotation du rotor, il faut changer le sens de rotation du flux. Pour ce faire, échangez deux fils qui fournissent le courant du réseau au stator. Dans ce cas, la séquence des phases ABC passe à ACB ou BAC, et le flux tourne dans le sens opposé.
Le rotor du moteur tourne avec une fréquence asynchrone n2, et donc le moteur est appelé asynchrone. La fréquence de rotation du flux magnétique est appelée fréquence synchrone n1. Fréquence de rotation ![]() rotor
rotor
Théoriquement, le glissement varie de 1 à 0 ou de 100 % à 0, puisqu'à rotor arrêté au premier instant de démarrage, n2 - 0 ; et si l'on imagine que le rotor tourne de manière synchrone avec le débit, n2 = nx.
Plus la charge sur l'arbre est importante, plus la vitesse du rotor n2 est faible et, par conséquent, plus S est grand, car le couple de freinage le plus important doit être équilibré par le couple ; ce dernier n'est possible qu'avec une augmentation de E2 et I2, et donc de S. Le glissement à charge nominale SH pour les moteurs asynchrones est de 1 à 7 % ; le nombre inférieur fait référence à des moteurs puissants.