Moteur à courant continu à courant alternatif. Le moteur à courant continu est
Si vous êtes intéressé par les détails, alors le principe de fonctionnement du moteur courant continu décrit en détail sur de nombreux sites et même avec des formules. Nous avons décidé de parler non seulement de cela, mais aussi de certaines fonctionnalités qui ne sont pas si connues.
Quelques mots sur les machines à courant continu
Il a été obtenu avant la variable, et dès son apparition, des expériences ont commencé pour savoir à quoi pouvait servir cette bête. La relation entre le courant, le champ magnétique et la rotation a été établie assez rapidement. Cela a commencé avec le fait que Faraday a mis un aimant dans un enroulement avec des fils et a découvert l'apparition d'un courant. Après cela, il a découvert que si vous mettez d'abord l'aimant à l'intérieur de la bobine, puis appliquez un courant, l'aimant sortira. Ou, au contraire, sera attiré à l'intérieur. C'est le principe de fonctionnement d'une machine à courant continu - utilisation des interactions champ magnétique et électricité. Et maintenant, faisons attention au fait que si nous "poussons" un aimant, nous obtiendrons de l'électricité, et si nous fournissons de l'électricité, nous "poussons" l'aimant. C'est-à-dire que les machines à courant continu, dont nous considérons le dispositif et le principe de fonctionnement, sont précisément des machines. C'est-à-dire que le moteur est aussi un générateur, c'est-à-dire qu'il s'agit de machines de conversion réversible d'énergie mécanique en énergie électrique (courant). L'aimant a deux pôles, l'électricité plus et moins. L'interaction de l'aimant et du courant dans ce cas obéit à des lois complexes, mais si nous nous intéressons à la rotation (et les mouvements de retour progressifs sont rarement nécessaires en technologie), alors nous ne pouvons obtenir qu'une seule direction - dans le sens des aiguilles d'une montre par rapport à la polarité des aimants et le sens du courant. C'est la fameuse « règle de la vrille », ou « règle de la main gauche ». Nous pouvons facilement changer la polarité du courant d'enroulement en échangeant deux fils, mais nous ne pouvons pas changer les pôles de l'aimant et simplement brûler le moteur. Pour référence, vous pouvez consulter la règle de la "main droite". Il existe une telle chose en génie électrique, cela s'applique également aux machines à courant continu, mais en termes de génération d'énergie. 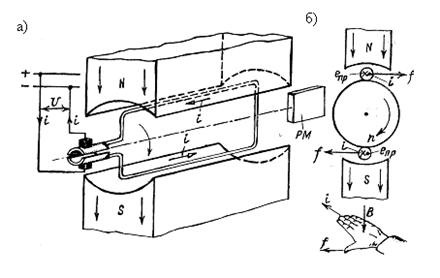
La rotation de l'arbre lui-même se produit comme suit. A l'intérieur du champ magnétique se trouve un rotor avec un arbre sur lequel repose la bobine. Lorsqu'un courant est appliqué, il induit un champ magnétique. Les aimants s'attirent avec des pôles différents et se repoussent avec les mêmes pôles. Des aimants externes « repoussent » les électro-aimants du rotor qui ont été activés, les forçant à « se repousser » tout le temps tant qu'il y a du courant, ce qui entraîne la rotation de l'arbre.
C'est le principe de fonctionnement d'un moteur à courant continu, tout le reste n'est que détails et détails techniques.
Caractéristiques du dispositif à moteur à courant continu
Bien sûr, en théorie, le principe de fonctionnement d'une machine à courant continu est clair, mais un lecteur curieux demandera immédiatement - comment le rotor commencera-t-il à tourner s'il se trouve à l'intérieur d'un aimant bipolaire ? Une telle question est inévitable, et pour y répondre, vous devrez examiner attentivement la conception d'un moteur à courant continu. Au passage, quelques connaissances seront utiles pour comprendre le fonctionnement des moteurs courant alternatif.
Commençons par une liste des difficultés rencontrées par les premiers créateurs de DPT.
- Disponibilité deux points morts, dont le lancement indépendant n'est pas possible. (Les deux mêmes pôles d'aimants).
- Répulsion magnétique trop faible à faible courant. Ou une forte résistance à la rotation empêchant le démarrage.
- Arrêt du rotor après un tour. Pas de rotation, mais oscillant d'avant en arrière, car après avoir traversé la moitié du cercle, "l'aimant" du rotor n'a pas été repoussé, mais attiré, c'est-à-dire qu'il n'a pas accéléré la rotation, mais l'a ralentie.
Il y avait des matériaux et quelques petites choses, comme la mise en place du principe d'une machine électrique réversible.
Les premiers à gagner étaient les "points morts", utilisant non pas deux, mais trois aimants ou plus. Trois dents sur le rotor éliminent les points morts, une est toujours dans un champ magnétique et le moteur peut être démarré à partir de n'importe quelle position du rotor.
Nous avons pu surmonter le problème d'accélération et de décélération en appliquant le principe de fonctionnement d'une machine à courant continu - facilité de commutation entre plus et moins tout en maintenant le courant. En d'autres termes, la première moitié du tour après le démarrage, le rotor démarre avec la polarité du courant : en haut, plus, en bas, moins. Dès que le point supérieur occupe la position inférieure, la polarité des points passe en moins - plus, et la "répulsion - accélération" se poursuit jusqu'à la fin de la révolution, après quoi le cycle est répété et le freinage est exclu. Un tel mécanisme est appelé collectionneur. Les balais mêmes du moteur électrique, qui assurent le transfert du courant d'un contact fixe à un arbre rotatif. Et quel spectacle ! Avec un changement de signe sur le rotor 2 fois par tour. Calculez combien le collecteur doit travailler si le moteur tourne à 2000 tr/min.
Le collecteur est la partie la plus difficile lors de la conception d'un moteur à courant continu, car il permet la conversion inverse de la rotation en courant. Le principal consommable est le pinceau. Ayant acheté nouvel appareil avec un moteur électrique, assurez-vous d'avoir une pièce de rechange. Ne soyez pas paresseux, tant que l'appareil est neuf, achetez quelques ensembles supplémentaires.
La complexité du collecteur vous permet de déterminer visuellement son état et le bon fonctionnement de l'étincelle. C'est vraiment mauvais quand des étincelles (et le collecteur n'est rien de plus qu'un interrupteur de contact) forment un anneau - "feu tous azimuts". Cela signifie que le moteur ne durera pas longtemps. Alors que la lutte contre les étincelles se poursuit avec un succès variable, il n'est pas possible de la vaincre complètement, mais il a été possible de prolonger la durée de vie du DPT.
S'il vous a semblé que nous avions oublié les courants faibles lors du démarrage, après avoir immédiatement considéré le troisième problème, vous vous trompez. Le problème de lancement s'est avéré si compliqué que nous le considérerons séparément.
Courants de démarrage des moteurs à courant continu
Ainsi, le principe de fonctionnement d'un moteur à courant continu est clair, nous avons prévu l'auto-démarrage, supprimé le freinage sectoriel sur les pôles magnétiques inversés, il reste à le mettre en marche. Mais voici le problème. Le rotor ne tourne toujours pas, bien que tout soit en ordre. Le fait est que pendant que nous finalisions notre moteur, le rotor est devenu plus lourd, il a des volants d'inertie et tout ça, et le courant n'est tout simplement pas suffisant pour que les aimants puissent "faire tourner" le rotor. "Qu'est-ce que c'est qu'un coquin !" (c) un expérimentateur curieux s'exclamera et augmentera simplement le courant. Et vous savez, le moteur va vraiment tourner. Avec plusieurs si :
- Si les enroulements ne brûlent pas (fils dans la bobine);
- Si la surintensité résiste ;
- Si les secteurs de commutation ne se soudent pas sur le collecteur lors d'un tel démarrage, etc.
Ainsi, une simple augmentation courant de démarrage a rapidement été considérée comme la mauvaise décision. Soit dit en passant, nous n'avons pas encore mentionné le principal avantage des moteurs à courant continu par rapport aux moteurs à courant alternatif - c'est transmission directe du couple, dès le démarrage. En termes simples, à partir du moment où la rotation commence, l'arbre DCT peut «tourner» n'importe quoi, en surmontant une résistance importante, qui dépasse la puissance des moteurs à courant alternatif.
Cet avantage est devenu le talon d'Achille de DPT. Le principe même de fonctionnement d'une machine à courant continu ne semblait pas permettre de modifier arbitrairement le courant de démarrage d'un côté. D'autre part, les tentatives de donner un courant élevé pour le démarrage et de le réduire après le démarrage nécessitaient une automatisation. Initialement, des démarreurs et des démarreurs étaient utilisés, en particulier pour les DPT de forte puissance, mais il s'agissait d'une branche de développement sans issue. Rejet ajustement en douceur courant de démarrage autorisé ici pour trouver un compromis raisonnable. En fait, cela ressemble maintenant au démarrage d'un moteur, à l'accélération d'une voiture. Nous commençons à avancer 1ère vitesse, puis nous tournons sur les 2e, 3e et maintenant nous nous précipitons sur l'autoroute à la 4e vitesse. Seulement dans ce cas, les "transmissions", c'est-à-dire les courants, les commutateurs démarreur automatique. Tout ce génie électrique résout deux problèmes en même temps - démarrage en douceur DPT sans surcharges et en gardant le réseau électrique (alimentation du moteur) intact. Comme le principe de fonctionnement d'un moteur à courant continu, cet automatisme repose sur conversion directe. En douceur, le courant monte à la valeur de départ, comme un équilibre entre le courant d'entrée et les courants sur les enroulements avant le début de la rotation. Après le début de la rotation, la force du courant diminue fortement et augmente à nouveau "en ajustant la rotation de l'arbre", et ainsi de suite 2 à 3 fois de plus.
Ainsi, le lancement a cessé d'être "en douceur", mais est devenu sûr pour tout le monde. La chose la plus importante qui a été sauvée avec un tel schéma, et aujourd'hui c'est la plus courante, le principal avantage est couple. Dans le même temps, la construction d'un moteur à courant continu fiable s'est simplifiée, la puissance a augmenté et les courants de démarrage, s'ils restent un casse-tête pour cette classe de moteurs, ont cessé d'être critiques pour les mécanismes.
Applications pour moteurs à courant continu
Les moteurs à courant continu, ainsi que les machines à courant continu, dont nous avons considéré le dispositif et le principe de fonctionnement, sont utilisés là où il n'est pas pratique d'utiliser une connexion permanente aux réseaux (un bon exemple est un démarreur de voiture, qui est à courant continu), où un tel la connexion est impossible (par exemple, des jouets avec des moteurs pour enfants), ou lorsque même une telle connexion n'est pas suffisante. Par exemple, le transport ferroviaire, qui semble être connecté à des réseaux à courant alternatif, mais les couples requis sont tels que seuls des moteurs à courant continu peuvent être utilisés, dont les principes n'ont pas changé. Et en fait, ces dernières années, la portée n'a pas été réduite, mais seulement augmentée. Comment plus de capacité batterie, plus un tel moteur fonctionnera longtemps de manière autonome. Plus les dimensions sont petites, plus le gain de puissance est important.

Économie- c'est une question d'avenir, tant qu'il n'y a rien de spécial à sauver et que la question ne s'est pas posée, les moteurs variables seront plus simples. Mais ils ne pourront pas évincer DPT. Tels sont-ils - DPT, ou machines à courant continu, dont nous avons étudié le dispositif et le principe de la 6e à la 8e année, mais nous l'avons oublié il y a longtemps.
Dans les entraînements où une large gamme de contrôle de vitesse est requise, un moteur électrique à courant continu est utilisé. Il vous permet de maintenir la vitesse de rotation avec une grande précision et d'effectuer les réglages nécessaires.
Le dispositif des moteurs à courant continu
Le fonctionnement de ce type de moteur est basé sur. Si un conducteur à travers lequel circule un courant électrique est placé dans un champ magnétique, alors, selon, une certaine force agira sur lui.
Lorsque le conducteur croise les lignes de force magnétiques, il est guidé force électromotrice dirigé dans le sens opposé au passage du courant. Le résultat est un contrecoup. Il y a une transformation en cours Puissance électrique en mécanique avec échauffement simultané du conducteur.
Toute la structure de l'appareil est constituée d'une armature et d'une inductance, entre lesquelles se trouve un entrefer. L'inducteur crée un champ magnétique fixe et comprend des pôles principaux et supplémentaires fixés sur le châssis. Les enroulements d'excitation sont situés sur les pôles principaux et créent un champ magnétique. Les pôles supplémentaires contiennent un enroulement spécial qui améliore les conditions de commutation.
L'armature comprend un système magnétique. Son éléments basiques sont l'enroulement de travail, placé dans les rainures, des tôles séparées et un collecteur, à l'aide duquel un courant continu est fourni à l'enroulement de travail.
Le collecteur est réalisé sous la forme d'un cylindre et monté sur l'arbre du moteur. Les extrémités de l'enroulement d'ancre sont soudées à ses protubérances. Le courant électrique est retiré du collecteur à l'aide de brosses fixées dans des supports spéciaux et fixées dans une certaine position.
Processus de base : démarrage et freinage
Chaque moteur à courant continu effectue deux processus principaux, le démarrage et le freinage. Au tout début du démarrage, l'armature est à l'arrêt, la tension et la force opposée à la FEM sont égales à zéro. Avec une légère résistance d'induit, la valeur du courant de démarrage dépasse la valeur nominale, environ 10 fois. Pour éviter la surchauffe de l'enroulement d'induit lors du démarrage, des rhéostats de démarrage spéciaux sont utilisés. Avec une puissance moteur jusqu'à 1 kilowatt, le démarrage direct est effectué.
Il existe plusieurs méthodes de freinage utilisées dans les moteurs à courant continu. Lors d'un freinage dynamique, l'enroulement d'induit est court-circuité ou à l'aide de résistances. Cette méthode fournit l'arrêt le plus précis. Le freinage régénératif est le plus économique. Ici, il y a un changement dans la direction de l'EMF à l'opposé.
Le freinage inverse est effectué en modifiant la polarité du courant et de la tension dans l'enroulement d'induit, ce qui vous permet de créer un couple de freinage efficace.
Comment fonctionne un moteur à courant continu
une étincelle se produit. Cela réduit la fiabilité des machines et limite leur portée.
Un inconvénient important du DPT est la nécessité d'une transformation préalable pour eux. énergie électrique courant alternatif en énergie électrique en courant continu.
13.2. Le dispositif et le principe de fonctionnement des moteurs à courant continu
Les moteurs à courant continu se composent de trois parties principales :
– la partie fixe est un châssis avec une inductance ;
– partie tournante - ancre ;
– collecteur monté sur l'arbre de l'induit et tournant avec lui.
Inducteur - un système d'électroaimants fixes (pôles) installés autour de la circonférence sur le châssis de la machine, qui se composent de noyaux, de pièces polaires nécessaires pour créer la distribution requise du flux magnétique et des enroulements,
appelés enroulements d'excitation.
Les noyaux et les pièces polaires sont en tôle d'acier électrique.
Le lit - coulé ou soudé - est en fonte ou en acier, sur lequel sont installés des poteaux et des flasques de roulement, dans lesquels sont fixés les roulements de l'arbre d'induit. Le lit est aussi la culasse de la machine, assurant la fermeture du circuit magnétique.
Le but de l'inductance est de créer un flux magnétique lorsque le courant passe à travers l'enroulement de champ.
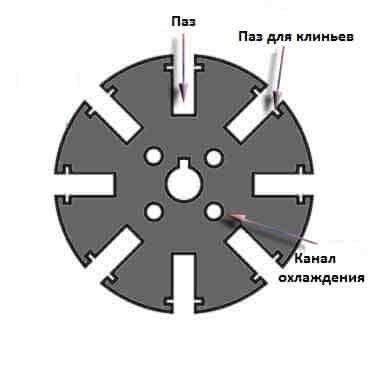
L'armature se compose d'un noyau denté et d'enroulements posés
dans rainures du noyau, appeléesenroulements d'ancre. Le noyau de l'induit est en tôle électrique
acier (0,5 mm d'épaisseur), à partir duquel des disques avec des rainures sont emboutis. Les disques sont recouverts d'un vernis isolant pour réduire les pertes par courants de Foucault.
Les enroulements d'induit sont des sections sous forme de bobines constituées de fil de cuivre.
Les schémas d'enroulement sont en boucle ou en onde, les bobines peuvent être connectées en série et en parallèle. Un enroulement en boucle simple a des machines bipolaires de faible puissance
(jusqu'à 1 kW) et les machines d'une puissance supérieure à 500 kW ; l'enroulement simple d'onde est utilisé pour des machines de petit et puissance moyenne(jusqu'à 500 kW) à une tension de 110 V et plus.
Le but de l'induit est de créer un couple électromagnétique en faisant interagir le courant dans l'enroulement d'induit avec le champ magnétique des pôles créé par le courant d'excitation.
Le collecteur est un cylindre creux constitué de plaques de cuivre en forme de coin (en forme de "queue d'aronde"), isolées les unes des autres et du corps. Les plaques collectrices sont également isolées de l'arbre de la machine.
Le collecteur assemblé est monté sur l'arbre d'induit. Les débuts et les extrémités de la section d'enroulement placées dans les rainures de l'armature sont soudées aux plaques collectrices.
Des balais électrographites fixes sont installés sur le collecteur. L'enroulement d'induit tournant est relié au circuit extérieur par un contact glissant entre les balais et le collecteur.
Les balais divisent l'enroulement d'induit fermé en branches parallèles, le nombre de branches parallèles est égal au nombre de balais, donc la FEM sur les balais (EMF de la machine) est égale à la FEM d'une branche parallèle.
Le collecteur est un convertisseur électromécanique et permet la création d'un couple constant dans la direction (pour les moteurs) en changeant la direction du courant dans les conducteurs de l'enroulement d'induit se déplaçant de la zone d'un pôle
dans le domaine d'un autre.
À Dans les générateurs, le collecteur assure le redressement de la FEM variable induite dans l'enroulement d'induit tournant.
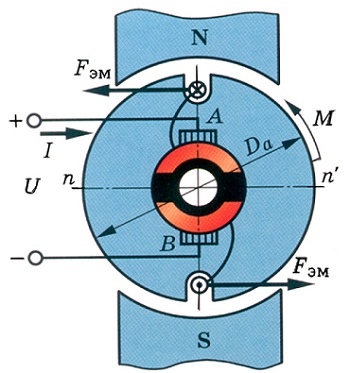
Désignation DPT sur schémas électriques et le principe de son fonctionnement sont illustrés à la Fig. 97a, b.
FEM |
||
La tension d'une source CC est appliquée aux bornes de l'armature fixe. Soit la direction du courant dans l'armature I I comme indiqué sur la Fig. 97b.
À enroulement d'excitation situé aux pôles de l'inducteur est également alimenté en courant continu, ce qui crée un champ magnétique pénétrant dans l'induit. Si les pôles de l'inducteur sont en matériau magnétique dur alors il se peut qu'il n'y ait pas d'enroulement d'excitation sur eux, le champ magnétique sera toujours créé par des pôles à magnétisation opposée (N et S).
En raison de l'interaction du champ magnétique des pôles et du courant d'induit, des forces électromagnétiques F EM se forment, qui créent un couple
M C F I ,
où C m est le coefficient de proportionnalité ; F est le flux d'excitation du DPT ; I I est le courant d'induit du DPT.
Dans une armature DPT tournant dans un champ magnétique, une FEM est induite, qui est opposée à la direction du courant d'induit, donc cette FEM est appelée retour ou contre-EMF
E CE F n,
où C E est le coefficient de proportionnalité ; Ф - flux d'excitation DPT ; n - fréquence de rotation DPT.
Équation moteur de base
Uc \u003d E + Iya Rya,
où U s est la tension du secteur, I i est le courant d'induit, R i est la résistance de l'enroulement d'induit.
D'où vient le courant d'induit
I i Uс R i E.

En remplaçant la valeur E dans cette expression, nous obtenons la vitesse du moteur à courant continu :
U c | je | |||
CEF |
||||
À partir de cette expression, on peut voir que la vitesse de rotation du DCT dépend de l'amplitude de la tension d'entrée, du courant d'excitation (flux
Ф I c ), résistance de la chaîne d'ancre R i et charge sur l'arbre I i .
13.3. Types de moteurs à courant continu
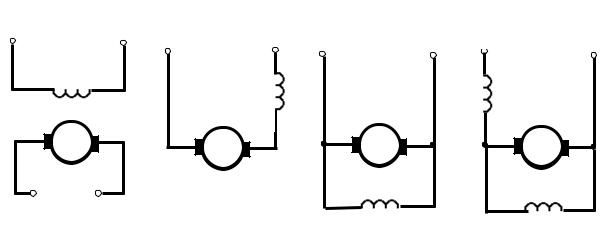
Selon la méthode de connexion de l'enroulement d'excitation et de l'enroulement d'induit, les DCT sont divisés en types suivants :
– DPT avec excitation indépendante (Fig. 98, a);
– DPT avec excitation séquentielle (Fig. 98, b);
– DPT avec excitation parallèle (Fig. 98, c);
– DPT avec excitation mixte (Fig. 98, d).
À DPT à excitation indépendanteenroulement d'excitation et l'enroulement d'induit est alimenté par différentes sources. L'enroulement d'excitation est désigné: H1 - H2 (Fig. 98, a).
Les moteurs de forte puissance sont généralement exécutés avec une excitation indépendante.
À Enroulement d'excitation d'excitation série DCT connectésuccessivementà l'enroulement d'induit, est appelé série (C1 - C2, Fig. 98, b).
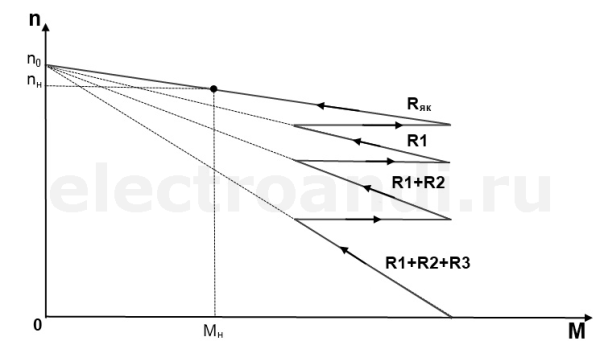
À moteurs à excitation série, le couple sous charge augmente plus que celui des moteurs à excitation parallèle,tandis que le régime moteur est réduit. Cette propriété détermine l'utilisation généralisée du DPT dans les locomotives électriques de construction mécanique, les transports urbains.
Cependant, le démarrage du moteur avec une excitation en série sans charge est inacceptable, car le régime moteur peut dépasser la fréquence autorisée, ce qui peut entraîner un accident - le moteur tourne "en panne".
À DCT avec enroulement d'excitation d'excitation parallèle connecté en parallèle avec l'enroulement d'induit, appelé shunt
(W1 - W2, Fig. 98, c).
Les moteurs à excitation parallèle offrent une vitesse stable sous diverses charges et la possibilité d'une régulation en douceur de cette vitesse. Par conséquent, les DCT à excitation parallèle sont utilisés pour un entraînement électrique qui nécessite une vitesse constante sous diverses charges.
et régulation large et lisse de celui-ci. Z1
Les DCT à excitation mixte ont le couple de démarrage le plus élevé et sont utilisés lorsque des couples de démarrage importants sont requis ou lorsque des surcharges à court terme et des accélérations élevées sont possibles - par exemple, pour démarrer des compresseurs.
Selon les besoins, les enroulements d'excitation parallèles et série peuvent être connectés "selon" ou "opposés". Avec l'inclusion "consonne", les flux magnétiques des enroulements sont dirigés de la même manière et s'additionnent, avec "compteur" - ils sont soustraits.
Comme vous le savez, un moteur à courant continu est un appareil qui, à l'aide de ses deux parties structurelles principales, peut convertir l'énergie électrique en énergie mécanique. Ces détails clés incluent :
- stator - une partie fixe / statique du moteur, qui contient les enroulements d'excitation auxquels l'alimentation est fournie;
- rotor - la partie rotative du moteur, qui est responsable de la rotation mécanique.
En plus des pièces principales mentionnées ci-dessus de la conception du moteur à courant continu, il existe également des pièces auxiliaires, telles que :
- collier;
- poteaux;
- enroulement d'excitation ;
- enroulement d'induit ;
- collectionneur;
- brosses.
Ensemble, toutes ces pièces constituent la conception intégrale du moteur à courant continu. Et maintenant, regardons de plus près les principales parties du moteur électrique.

La culasse d'un moteur à courant continu, qui est principalement en fonte ou en acier, fait partie intégrante du stator ou de la partie statique du moteur. Le sien fonction principale consiste à former un revêtement protecteur spécial pour les parties internes les plus minces du moteur, ainsi qu'à fournir un support pour l'enroulement d'induit. De plus, la culasse sert de couvercle de protection pour les pôles magnétiques et l'enroulement de champ du moteur à courant continu, fournissant ainsi un support pour l'ensemble du système d'excitation.
poteaux
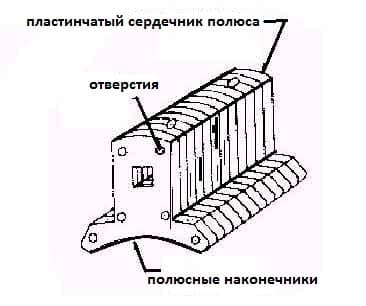
Les pôles magnétiques d'un moteur à courant continu sont des parties du corps boulonnées à la paroi interne du stator. La conception des pôles magnétiques se compose essentiellement de deux parties seulement, à savoir le noyau polaire et la pièce polaire, qui sont reliées l'une à l'autre sous l'influence de la pression hydraulique et fixées au stator.
Vidéo : Conception et assemblage d'un moteur à courant continu
Quoi qu'il en soit, les deux parties ont des objectifs différents. Le noyau polaire, par exemple, a une petite surface la Coupe transversale et est utilisé pour maintenir la pièce polaire sur la culasse, tandis que la pièce polaire, ayant une section transversale relativement grande, est utilisée pour propager le flux magnétique créé sur l'entrefer entre le stator et le rotor afin de réduire la perte de résistance magnétique . De plus, la pièce polaire a une pluralité de rainures d'enroulement d'excitation, qui créent le flux magnétique d'excitation.

Les enroulements d'excitation d'un moteur à courant continu sont constitués de bobines d'excitation (fil de cuivre) enroulées autour des rainures des pièces polaires de telle sorte que lorsque le courant d'excitation traverse l'enroulement, une polarité opposée se produit aux pôles adjacents. Essentiellement, les enroulements d'excitation agissent comme une sorte d'électroaimant capable de créer un flux d'excitation à l'intérieur duquel tournerait le rotor du moteur électrique, puis de l'arrêter facilement et efficacement.
Enroulement d'induit
L'enroulement d'induit d'un moteur à courant continu est fixé au rotor ou à la partie rotative de la machine et, par conséquent, est affecté par un champ magnétique changeant le long de sa trajectoire de rotation, ce qui entraîne directement des pertes de magnétisation.
Pour cette raison, le rotor est constitué de plusieurs plaques d'acier électrique à faible hystérésis pour réduire les pertes magnétiques telles que la perte par hystérésis et la perte par courant de Foucault, respectivement. Des plaques d'acier laminé sont assemblées pour donner au corps de l'ancre une structure cylindrique.
Le corps de l'armature est constitué de rainures (fentes) constituées du même matériau que le noyau, auxquelles sont fixés les enroulements d'armature, et de plusieurs spires de fil de cuivre uniformément réparties sur la périphérie de l'armature. Les rainures des rainures présentent des jonctions poreuses en forme de coin pour empêcher le conducteur de se plier sous l'effet de la force centrifuge importante émise lors de la rotation du rotor, ainsi qu'en présence d'un courant d'alimentation et d'une excitation magnétique.
Il existe deux types de conception d'enroulement d'induit de moteur à courant continu :
- enroulement en boucle (dans ce cas, le nombre de trajets de courant parallèles entre les adaptateurs (A) est égal au nombre de pôles (P), c'est-à-dire A \u003d P.
- enroulement ondulé (dans ce cas, le nombre de trajets de courant parallèles entre les adaptateurs (A) est toujours de 2, quel que soit le nombre de pôles, c'est-à-dire que la machine est conçue en conséquence).
Collectionneur

Le collecteur du moteur à courant continu est une structure cylindrique de segments de cuivre empilés, mais isolés avec du mica. Si nous parlons de DCT, le collecteur est utilisé ici principalement comme moyen de commutation ou de transfert du courant d'alimentation du réseau à travers les balais du moteur électrique vers les enroulements d'induit montés dans la structure rotative.
pinceaux

Les balais de moteur à courant continu sont fabriqués à partir de structures en carbone ou en graphite, créant un contact glissant ou un curseur au-dessus du commutateur rotatif. Les pinceaux sont utilisés pour transmettre courant électrique de la boucle externe à la forme rotative du collecteur, où il pénètre ensuite dans les enroulements d'induit. Le collecteur et les balais d'un moteur électrique servent, en général, à transférer l'énergie électrique d'un circuit électrique statique vers une zone à rotation mécanique, ou simplement un rotor.
Moteurs à courant continu conçu pour convertir l'énergie DC en travail mécanique.
Les moteurs à courant continu sont beaucoup moins courants que les moteurs à courant alternatif. Cela est principalement dû au coût relativement élevé, à un appareil plus complexe et aux difficultés d'alimentation. Mais, malgré toutes ces lacunes, le DPT présente de nombreux avantages. Par exemple, les moteurs à courant alternatif sont difficiles à réguler, tandis que les DCT sont parfaitement régulés à bien des égards. De plus, les DCT ont des caractéristiques mécaniques plus rigides et permettent un couple de démarrage important.
Les moteurs électriques à courant continu sont utilisés comme moteurs de traction, dans le transport électrique, comme actionneurs divers.
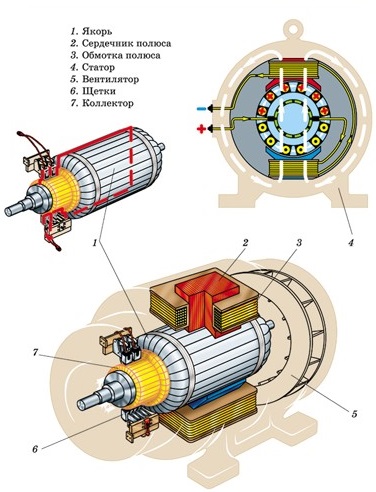
Le dispositif des moteurs à courant continu
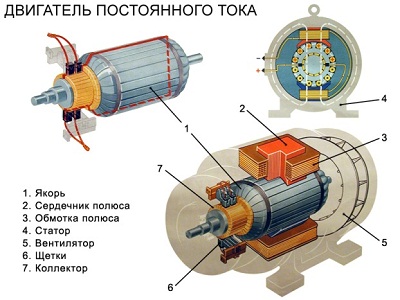
La conception d'un moteur à courant continu est similaire à celle d'un moteur à courant alternatif, mais il existe encore des différences significatives. Sur le châssis 7, qui est en acier, est installé un enroulement d'excitation sous la forme de bobines 6. Des pôles supplémentaires 5 peuvent être installés entre les pôles principaux pour améliorer les propriétés du moteur à courant continu. Une ancre 4 est installée à l'intérieur, qui se compose d'un noyau et d'un collecteur 2, et est installée à l'aide de roulements 1 dans le carter du moteur. Le collecteur est une différence significative par rapport aux moteurs à courant alternatif. Il se connecte aux balais 3, ce qui vous permet d'alimenter ou dans les générateurs, au contraire, de supprimer la tension du circuit d'ancrage.
Principe de fonctionnement
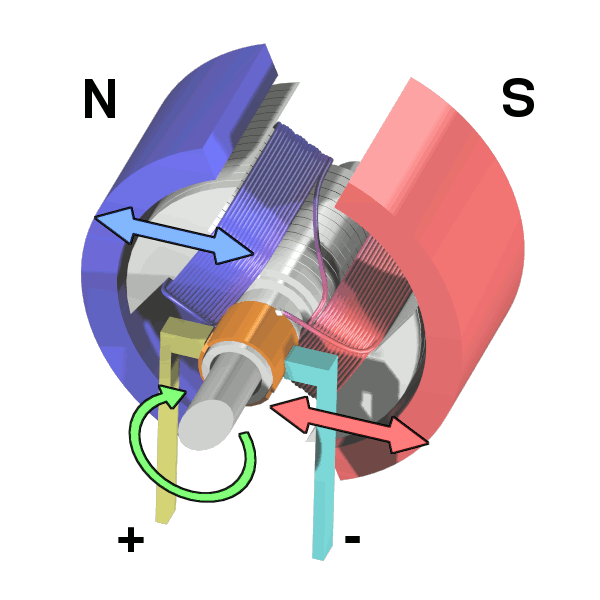
Le principe de fonctionnement du DPT est basé sur l'interaction des champs magnétiques de l'enroulement d'excitation et de l'induit. On peut imaginer qu'au lieu d'une armature, nous avons un cadre traversé par le courant, et au lieu d'un enroulement d'excitation, un aimant permanent avec des pôles N et S. Lorsqu'un courant continu traverse le cadre, le champ magnétique de l'aimant permanent commence à agir dessus, c'est-à-dire que le cadre commence à tourner, et , puisque la direction du courant ne change pas, le sens de rotation du cadre reste le même.
Lorsque la tension est appliquée aux bornes du moteur, le courant commence à circuler dans l'enroulement d'induit, comme nous le savons déjà, le champ magnétique de la machine commence à agir dessus, tandis que l'induit commence à tourner, et puisque l'induit tourne dans un champ magnétique champ, EMF commence à se former. Cette FEM est dirigée contre le courant, en relation avec cela, elle est appelée contre-EMF. Il peut être trouvé en utilisant la formule
Où Ф est le flux magnétique d'excitation, n est la vitesse de rotation et Ce est le moment de conception de la machine, qui reste constant pour celle-ci.
La tension aux bornes est supérieure à la force contre-électromotrice par la quantité de chute de tension dans le circuit d'induit.
![]()
Et si nous multiplions cette expression par le courant, nous obtenons l'équation du bilan de puissance.
![]()
Le côté gauche de l'équation UI i représente la puissance fournie au moteur électrique, le côté droit le premier terme EI i représente la puissance électromagnétique, et le second I i R i est la puissance des pertes dans le circuit d'induit.