टैकोमीटर को आर्डिनो से जोड़ना। Arduino पर आधारित टैकोमीटर। Arduino का उपयोग करके HD44780 LCD डिस्प्ले पर डेटा आउटपुट
टैकोमीटर एक पहिया या घूमने वाली किसी भी चीज़ के आरपीएम (प्रति मिनट क्रांति) की गणना करने के लिए एक उपयोगी उपकरण है। टैकोमीटर बनाने का सबसे आसान तरीका आईआर ट्रांसमीटर और रिसीवर का उपयोग करना है। जब उनके बीच कनेक्शन बाधित होता है, तो आप जानते हैं कि कुछ घूम रहा है और आप संचार रुकावट की आवृत्ति के आधार पर RPM की गणना करने के लिए कोड का उपयोग कर सकते हैं।
सही माप इनपुट वाली मशीनों की निगरानी और निदान के लिए विश्वसनीय सिस्टम अत्यधिक मूल्यवान हैं। टैकोमीटर एक उपकरण है जो इंजन या टरबाइन रोटर के प्रति मिनट क्रांतियों को मापता है। उनका उपयोग सीखने की प्रक्रिया में हमारे पास मौजूद गति का ट्रैक रखने के लिए किया जाता है, जो हमें बताएगा कि यह ठीक से काम कर रहा है या नहीं। इस प्रकार के औजारों से हम उपकरण के रुकने से बचेंगे, और सही समय पर रखरखाव करने में सक्षम होंगे। इसका उपयोग पहियों, गियर या लेन द्वारा तय की गई दूरियों को जानने के लिए भी किया जा सकता है। वर्तमान कार्य मुख्य रूप से एक उपकरण के कार्यान्वयन पर आधारित है जिसमें इंजन का नियंत्रण देखा जा सकता है और इसकी गति को एक डिजिटल डॉटमोमीटर का उपयोग करके मापा जा सकता है। इस प्रकार के रूपांतरण का कारण यह है कि दालों की एक श्रृंखला को सटीक रूप से प्रसारित और डिकोड करना बहुत आसान है एनालॉग संकेत, खासकर अगर जिस दूरी पर सिग्नल प्रसारित किया जाना है वह लंबी और शोर है। इन मामलों में, आवृत्ति-वोल्टेज कनवर्टर को फिर से एनालॉग सिग्नल प्राप्त करने के लिए ट्रांसमिशन लाइन के अंत में रखा जाएगा। आवृत्ति-वोल्टेज कन्वर्टर्स का सबसे आम अनुप्रयोग मोटर गति माप में होता है, जहां मोटर गति के आनुपातिक दालों की एक श्रृंखला एक एनालॉग सिग्नल में बनती है जिसे मापा जाना चाहिए और संभवतः गति को नियंत्रित करने के लिए भी उपयोग किया जाता है। इस वोल्टेज की रैखिकता आमतौर पर पूर्ण पैमाने का 3% है। इस कारण से, यह रूपांतरण पैमाने के समीकरण में हस्तक्षेप नहीं करता है। एनालॉग इनपुट नमूना लोड करता है और इसे संधारित्र में रखता है। कैपेसिटर में सैंपल-एंड-होल्ड आउटपुट कनवर्टर का इनपुट है। कनवर्टर तब क्रमिक सन्निकटन का उपयोग करके एक डिजिटल एनालॉग स्तर का परिणाम उत्पन्न करता है। ये रजिस्टर हैं: हाई एंड रिजल्ट लिखें कम लिखें चेक रजिस्टर 0 चेक रजिस्टर 1 6 बिट्स 6-4: लागू नहीं किया गया, आवधिक ड्यूटी साइकिल के रूप में इसके सकारात्मक पक्ष की अवधि के सापेक्ष चौड़ाई के रूप में पढ़ा गया। मोटरों में, पल्स चौड़ाई मॉडुलन एक ऐसी तकनीक है जिसका उपयोग विद्युत प्रेरण की घूर्णी गति को नियंत्रित करने के लिए किया जाता है या प्रेरण मोटर्स. यह लगातार टॉर्क बनाए रखता है और बर्बादी नहीं होने देता विद्युतीय ऊर्जा. गति नियंत्रण परिवर्तन के लिए अन्य प्रणालियाँ विद्युत वोल्टेज, इंजन टोक़ को कम करना; या पेस्ट विद्युतीय प्रतिरोध, जिससे इस प्रतिरोध में ऊष्मा के रूप में ऊर्जा का ह्रास होता है। 10. कुछ हफ्ते पहले हमने सेंसर के बारे में पोस्ट की एक श्रृंखला खोली थी और हम सबसे पहले एक के साथ आए थे।
इस लेख में, हम देखेंगे कि Arduino का उपयोग करके टैकोमीटर बनाने के लिए IR ट्रांसमीटर और रिसीवर का उपयोग कैसे करें। परिणाम 16x2 एलसीडी डिस्प्ले पर प्रदर्शित होता है।
इस परियोजना का लक्ष्य एक इनपुट और एक आउटपुट के साथ एक प्रणाली बनाना है। डिवाइस के इनपुट पर एक संकेत होता है जो संचार विफलता के मामले में उच्च (+5V) से निम्न (+0V) स्तर में बदल जाता है। इस संकेत के अनुसार, Arduino आंतरिक काउंटर के मूल्य में वृद्धि करेगा। फिर अतिरिक्त प्रसंस्करण और गणना की जाती है, और जब ट्रिगर बाधित होता है, तो गणना की गई आरपीएम एलसीडी पर प्रदर्शित की जाएगी।
एक बहुत ही सस्ता सेंसर जिसमें दिलचस्प अनुप्रयोग हैं। यह सेंसर आपके सामने बाधाओं का पता लगाने के लिए बहुत अच्छा है और रोबोटिक्स में इसके कई अनुप्रयोग हैं। हम पहले ही देख चुके हैं कि इसका उपयोग वंश रोबोट अनुयायियों को बनाने के लिए और युद्ध के मैदान को छोड़ने से बचने के लिए सूमो युद्ध रोबोट में भी किया गया है। दोनों ही मामलों में, एक परावर्तक ऑप्टिकल सेंसर का उपयोग अंकन रेखाओं का पता लगाने के लिए किया जाता है जो या तो रोबोट को जिस पथ का अनुसरण करना चाहिए या युद्ध के मैदान की सीमाओं को परिभाषित करते हैं।
इसमें दो घटक होते हैं जो प्लास्टिक डालने से जुड़े होते हैं। इसका संचालन ट्रांजिस्टर के समान ही होता है, इसमें एक संग्राहक, एक उत्सर्जक होता है, और आधार वह होता है जो इस मामले में प्रकाश की एक अवरक्त किरण प्राप्त करने के बाद सक्रिय होता है। तो ये दो घटक एक साथ काम करते हैं। कृपया ध्यान दें कि वस्तु का रंग और सामग्री सेंसर के प्रदर्शन को प्रभावित कर सकती है। ऐसी सामग्रियां हैं जो दूसरों की तुलना में कम प्रकाश को दर्शाती हैं। इसका एक उदाहरण काली वस्तुएं हैं, जो अच्छे परावर्तक नहीं हैं, खासकर अगर उनकी सतह चिकनी नहीं है।
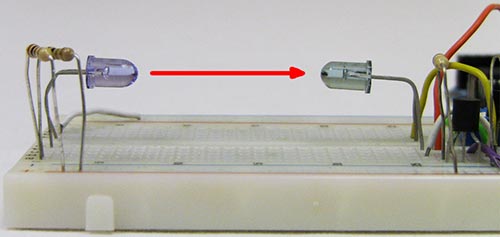
संचार के लिए, हम एक कम प्रतिरोध प्रतिरोधी के माध्यम से जुड़े आईआर एलईडी से आईआर बीम का उपयोग करेंगे ताकि यह उज्ज्वल रूप से चमक सके। एक रिसीवर के रूप में, हम एक फोटोट्रांसिस्टर का उपयोग करेंगे, जो आईआर एलईडी लाइट की अनुपस्थिति में "बंद" हो जाता है। कंप्यूटर के पंखे को IR ट्रांसमीटर और रिसीवर के बीच रखा जाएगा और चालू किया जाएगा। एक ट्रांजिस्टर सर्किट के माध्यम से जुड़ा एक आईआर रिसीवर इंटरप्ट उत्पन्न करेगा। परिणाम प्रदर्शित करने के लिए उपयोग किया जाएगा अरुडिनो एलसीडीइंटरफ़ेस, इसलिए हम LCD पर अंतिम RPM मान प्रदर्शित कर सकते हैं।
एलईडी एनोड एलईडी कैथोड फोटोट्रांसिस्टर कलेक्टर फोटोट्रांसिस्टर एमिटर। इस परियोजना के लिए, आपको निम्नलिखित घटकों की आवश्यकता होगी। कनेक्शन आरेख इस तरह दिखता है। जैसा कि आप देख सकते हैं, यह बहुत है सरल सर्किट. चुंबक की निकटता का पता लगाने के लिए हॉल इफेक्ट सेंसर का उपयोग किया जाता है। उनका उपयोग स्थिति एन्कोडर, एन्कोडर, रोटेशन डिटेक्शन के रूप में भी किया जा सकता है।
प्रारंभ में, इस खोज का पहला उपयोग आवधिक वर्गीकरण पर केंद्रित था। रासायनिक तत्व. हॉल इफेक्ट सेंसर का उपयोग स्थायी या स्थिर चुंबकीय क्षेत्रों को मापने के लिए किया गया था, लेकिन सेंसर को गति में होना आवश्यक था। इसने वह बनाया जिसे हम आज शास्त्रीय रूप से डिजिटल आउटपुट हॉल इफेक्ट स्विच के रूप में संदर्भित करते हैं।
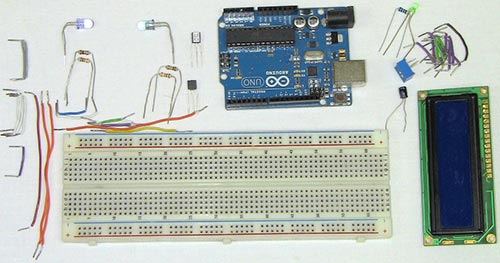
तत्व:
ब्रेड बोर्ड
ट्रिमर रोकनेवाला 5 kΩ
जम्परों
एसआईपी कनेक्टर
2x 2N2222 NPN ट्रांजिस्टर
अवरक्त एलईडी
phototransistor
रोकनेवाला 10 ओम
रोकनेवाला 100 kΩ
रोकनेवाला 15 kΩ या 16 kΩ
कंप्यूटर प्रशंसक
विस्तृत आइटम सूची
परियोजना में उपयोग किए गए सभी तत्व ऊपर सूचीबद्ध हैं, लेकिन मैं मुख्य तत्वों के कार्यों का अधिक विस्तार से वर्णन करूंगा।
ऑर्थोगोनल दो तत्व घटकों में एकल तत्व घटकों की प्रगति के साथ हॉल ट्रांसड्यूसर प्रौद्योगिकी का निरंतर विकास। यह टर्मिनलों में हॉल संभावित अंतर को कम करने के लिए किया गया था। अगली प्रगति ने चार-तत्व द्विघात कन्वर्टर्स के निर्माण का नेतृत्व किया। इन 4 तत्वों को एक पुल विन्यास में ओर्थोगोनली व्यवस्थित किया जाता है। ये सभी सिलिकॉन सेंसर बाइपोलर कंपाउंड से बने हैं।
यह परिचालन एम्पलीफायर के इनपुट पर त्रुटि संभावित अंतर को कम करना संभव बनाता है। अनियमित सर्किट में होने वाली सभी त्रुटियां स्विचिंग त्रुटियों या संभावित अंतर या रैखिक आउटपुट सेंसर पर त्रुटियों को प्राप्त करने की ओर ले जाती हैं। यह तंत्र अर्धचालक हॉल प्रभाव तत्वों में विशिष्ट शोर संभावित अंतर को समाप्त करता है। यह संभावित परजीवियों में अंतर के कारण तापमान और प्रेरण के लिए भी क्षतिपूर्ति करता है।
अरुडिनो यूएनओ
यह आर्डिनो बोर्ड, जिसका उपयोग हम IR बीम के रुकावट से दालों को संसाधित करने के लिए करेंगे, जो रिसीवर और सेंसर के बीच एक कंप्यूटर फैन ब्लेड की उपस्थिति का संकेत देता है। प्रशंसक के आरपीएम की गणना करने के लिए Arduino टाइमर के साथ इन दालों का उपयोग करेगा।
एलसीडी डिस्प्ले 16×2
Arduino द्वारा RPM की गणना करने के बाद, यह मान उपयोगकर्ता के अनुकूल तरीके से डिस्प्ले पर प्रदर्शित होगा।
इन सभी सुधारों के परिणामस्वरूप विश्वसनीय हॉल इफेक्ट सेंसर बनते हैं। भविष्य में "बुद्धिमान" सेंसर बनाने के लिए प्रोग्राम करने योग्य सेंसर दिखाई देंगे। हॉल इफेक्ट सेंसर नहीं होने पर सक्रिय नहीं होता है चुंबकीय क्षेत्रऔर एक चुंबकीय क्षेत्र की उपस्थिति में सक्रिय होता है, जैसा कि निम्नलिखित दो आंकड़ों में दिखाया गया है।
पृथ्वी का चुंबकीय क्षेत्र हॉल प्रभाव संवेदक को प्रभावित नहीं करता है। कुछ रेफ्रिजरेटर मैग्नेट सेंसर को सक्रिय करने के लिए पर्याप्त चुंबकीय क्षेत्र प्रदान कर सकते हैं। चुंबकीय क्षेत्र की अनुपस्थिति में सेंसर निष्क्रिय है। इसलिए, कुछ नहीं होता है अगर यह चुंबक का उत्तरी ध्रुव है जो संवेदनशील भाग के सामने से गुजरता है।
ट्रिमर रोकनेवाला 5 kΩ
इस ट्रिमर का उपयोग 16x2 LCD के कंट्रास्ट को एडजस्ट करने के लिए किया जाएगा। यह 0 से +5V की सीमा में एक एनालॉग वोल्टेज प्रदान करता है, जिससे आप एलसीडी की चमक को समायोजित कर सकते हैं।
इन्फ्रारेड एलईडी और फोटोट्रांसिस्टर
जब शक्तिशाली IR प्रकाश उस पर पड़ता है तो फोटोट्रांसिस्टर खुलता है। इसलिए, जब IR LED चालू होती है, तो यह फोटोट्रांसिस्टर को खुला रखता है, लेकिन अगर IR LED को कवर किया जाता है, उदाहरण के लिए, पंखे के ब्लेड से, तो फोटोट्रांसिस्टर बंद हो जाता है।
सेंसर एक पुल-अप रोकनेवाला का उपयोग करता है। इसका मतलब यह है कि जब यह सक्रिय नहीं होता है, तो सेंसर के पिन 3 का वोल्टेज रोकनेवाला के वोल्टेज से मेल खाता है। अन्यथा, वोल्टेज पुल-अप प्रतिरोध द्वारा लागू किया जाएगा। यहां वीडियो में परिणाम का एक छोटा सा पूर्वावलोकन दिया गया है।
इस उत्कृष्ट घटक को कार्यान्वित करने के कुछ उदाहरण यहां दिए गए हैं। नीचे दिया गया ग्राफ दिखाता है कि दूरी के साथ चुंबकीय क्षेत्र कैसे बदलता है। ग्राफ में, दूरी एक इंच के हजारवें हिस्से में व्यक्त की जाती है। इसलिए, सेंसर सक्रिय है। सेंसर अक्षम है।
2N3904 और 2N3906
इन ट्रांजिस्टर का उपयोग सिग्नल स्तर को परिवर्तित करने के लिए किया जाता है, ताकि फोटोट्रांसिस्टर से Arduino को आउटपुट पल्स प्रदान किया जा सके, जिसमें +0 और +5V के अलावा कोई वोल्टेज नहीं है।
सर्किट आरेख
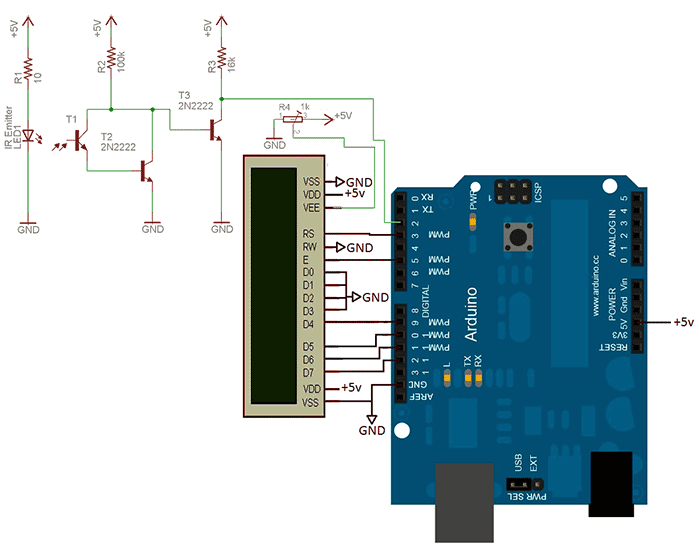
आरेख में, एलसीडी संचार इंटरफ़ेस सरल है और इसमें केवल 2 नियंत्रण रेखाएं और 4 डेटा लाइनें हैं।
हॉल इफेक्ट सेंसर के साथ एक अदृश्य या सील ड्राइव को महसूस किया जा सकता है। सेंसर को पानी, तेल आदि जैसे मीडिया के लिए कंटेनरों में सील किया जा सकता है। यह केवल आवश्यक है कि कंटेनर चुंबकीय क्षेत्र के लिए पारगम्य हो।
चुंबकीय घूर्णी रुकावट
इसलिए सेंसर सक्रिय है। अंजीर में। 5V सेंसर निष्क्रिय है क्योंकि चुंबकीय क्षेत्र लोहे की बाधा से अवरुद्ध है। सेंसर को रोटेशन स्पीड या पोजिशनिंग में स्विच के रूप में चालू किया जा सकता है। दो खिड़कियों के बीच, धातु का हिस्सा चुंबकीय क्षेत्र को अवरुद्ध करता है, इसलिए हॉल इफेक्ट सेंसर निष्क्रिय है।
सर्किट विशेषताएं
एलसीडी डिस्प्ले इंटरफ़ेस 16 × 2
2 कंट्रोल पिन और 4 डेटा ट्रांसफर के लिए Arduino से LCD से जुड़े हैं। यह वही है जो LCD को बताता है कि क्या करना है और कब करना है।
आईआर बीम ब्रेक सर्किट
IR बीम ब्रेक सिग्नल दूसरे डिजिटल पर जाता है अरुडिनो पिन. यह Arduino को बाधित करता है, जिससे यह पल्स को गिनने और टैक को डेटा प्राप्त करने की अनुमति देता है।
ऑटोमोटिव स्टार्ट-अप और औद्योगिक प्रक्रियाओं में यह एक व्यापक रूप से स्वीकृत सिद्धांत है जहां स्थिति का सटीक ज्ञान एक महत्वपूर्ण तत्व है। अंजीर में घूर्णन चुंबकीय क्षेत्र सक्रियण सेंसर। 7 आमतौर पर स्थिति के साथ दालों को सिंक्रनाइज़ करने के लिए घूर्णी गति को मापने के लिए उपयोग किया जाता है। चुंबक को घुमाकर सेंसर सक्रिय होता है। जब चुंबक का उत्तरी ध्रुव सेंसर के सामने से गुजरता है तो सेंसर निष्क्रिय हो जाता है।
एक ठोस वृत्ताकार चुम्बक, जैसा कि चित्र में दिखाया गया है। 7A को चुंबकीय वलय कहा जाता है। चुंबकीय वलय में बारी-बारी से उत्तरी और दक्षिणी ध्रुव होते हैं। इस प्रकार के चुंबक में 36 चुंबकीय ध्रुवों के साथ 2 चुंबकीय ध्रुव हो सकते हैं। नीचे दिया गया ग्राफ अलग-अलग दूरी पर उत्तरी और दक्षिणी ध्रुवों के बीच पारगमन को दर्शाता है।
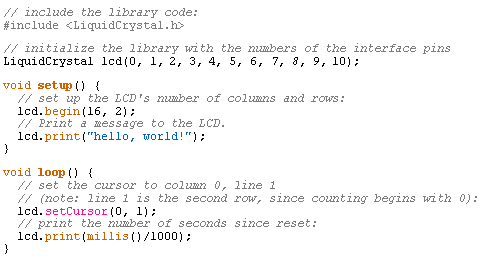
Arduino LCD लाइब्रेरी
इस परियोजना के लिए, हम Arduino LCD लाइब्रेरी का उपयोग करेंगे। मूल रूप से हम केवल दूसरी पंक्ति पर RPM मान को नए के साथ अपडेट करेंगे।
तैयारी के रूप में, नीचे दिए गए कोड को देखें, जो एलसीडी पर "हैलो, वर्ल्ड!" प्रदर्शित करने के लिए इस पुस्तकालय का उपयोग करता है। टैकोमीटर में, हम समान कोड का उपयोग करेंगे, विशेष रूप से: "lcd.print(millis()/1000);"।
स्तर का पता लगाने - आंदोलन
ध्यान दें कि सेंसर और चुंबक के बीच की दूरी की परवाह किए बिना संक्रमण बिंदु वास्तव में समान है। सेंसर के ऊपर एक अलग चुंबक निलंबित है। जैसे ही असेंबली का स्तर नहीं रह जाता है, सेंसर सक्रिय हो जाता है। हॉल इफेक्ट सेंसर का उपयोग अत्यधिक कुशल और पृथक वर्तमान सेंसर प्रदान करने के लिए इलेक्ट्रोमैग्नेट के संयोजन के साथ किया जा सकता है। इसका उपयोग घटकों को ओवरलोडिंग से होने वाले नुकसान से बचाने के लिए किया जा सकता है।
केवल आवश्यक घटक हॉल इफेक्ट सेंसर और फेराइट टॉरॉयड हैं। फ्लो मीटर के रूप में भी जाना जाता है, फ्लो मीटर आमतौर पर हॉल इफेक्ट सेंसर का उपयोग करते हैं। वे तरल और गैस प्रवाह को मापते हैं। "विस्फोटक वातावरण" कहते हैं, बाद वाले को बीच में अत्यधिक महत्व दिया जाता है।
आगे बढ़ने से पहले इस एलसीडी लाइब्रेरी के कार्यों को जितना संभव हो उतना विस्तार से समझें। यह अत्यधिक जटिल नहीं है और Arduino वेबसाइट पर अच्छी तरह से प्रलेखित है।
Arduino के साथ RPM की गिनती
चूंकि हम एक कंप्यूटर प्रशंसक के आरपीएम की गणना करने जा रहे हैं, हमें यह समझना चाहिए कि हम गणना करने के लिए आईआर बीम इंटरप्ट का उपयोग कर रहे हैं। यह बहुत सुविधाजनक है, लेकिन हमें इस बात का ध्यान रखना चाहिए कि कंप्यूटर के पंखे में 7 ब्लेड होते हैं। इसका मतलब है कि 7 रुकावटें 1 क्रांति के बराबर होती हैं।
कोई संपर्क नहीं = कोई चिंगारी नहीं = कोई विस्फोट नहीं! तुम भी एक वसंत का उपयोग करने से बचने के लिए एक दूसरे चुंबक के प्रतिकारक प्रभाव का उपयोग कर सकते हैं। एक अन्य मौलिक अनुप्रयोग स्तर का पता लगाना है। जैसा कि नीचे दिए गए चित्र में दिखाया गया है, हाइड्रोलिक सिस्टम एक निश्चित स्थिति तक पहुंचने तक चलता रहता है।
यह रोबोट प्रकार के अनुप्रयोगों में बहुत उपयोगी हो सकता है या स्थिति सटीकता अत्यंत महत्वपूर्ण है। एक कॉगव्हील के दांत वास्तव में एक माध्यम होते हैं जहां पहिया की स्थिति के आधार पर चुंबकीय चालकता बदलती है। नीचे दिया गया ग्राफ चुंबकीय क्षेत्र में इस परिवर्तन को बहुत स्पष्ट रूप से दिखाता है।
अगर हम इंटरप्ट को ट्रैक करते हैं, तो हमें यह जानना होगा कि हर सातवें इंटरप्ट का मतलब है कि 1 पूर्ण क्रांति अभी हुई है। यदि हम एक पूर्ण क्रांति में लगने वाले समय पर नज़र रखें, तो हम आसानी से RPM की गणना कर सकते हैं।
पहली क्रांति का समय = P * (µS/rev)
आरपीएम = आरपीएम = 60,000,000 * (μS/मिनट) * (1/पी) = (60,000,000/पी) * (आरपीएम)
ध्यान दें कि हॉल इफेक्ट सेंसर को दांत और चुंबक के बीच रखा गया है। हॉल सेंसर का उपयोग ब्रशलेस मोटर्स के रोटेशन का सटीक पता लगाने और ट्रैक करने के लिए भी किया जा सकता है। सभी मामलों में, आपको मूल कॉपीराइट धारक की सहमति भी लेनी होगी।
उनकी सामग्री के सभी अधिकार उनके हैं। पल्स काउंटर का उपयोग सेंसर से आने वाले विद्युत आवेगों को गिनने के लिए किया जाता है, अर्थात समय की इकाई के आधार पर योग निर्धारित करने के लिए। सेंसर आमतौर पर मोटर टैकोग्राफ या स्थिति सेंसर होते हैं। रोबोट में सर्वो मार्ग और दिशा निर्धारित करने के लिए।
आरपीएम की गणना करने के लिए, हम उपरोक्त सूत्र का उपयोग करेंगे। सूत्र सटीक है, और सटीकता इस बात पर निर्भर करती है कि Arduino कितनी अच्छी तरह से व्यवधान के बीच के समय का ट्रैक रख सकता है और पूर्ण क्रांतियों की संख्या की गणना कर सकता है।
सर्किट असेंबली
नीचे दी गई तस्वीर में आप सभी आवश्यक भागों और जंपर्स को आरेख में देख सकते हैं।
दालों की संख्या का उपयोग किसी कमरे या मेले में प्रवेश करने वाले लोगों की गिनती के लिए किया जा सकता है। ऐसे ऊर्जा मीटर हैं जो खपत किए गए वाट के अनुपात में दालों का उत्सर्जन करते हैं। आजकल, पानी और गैस मीटर में खपत की गणना के लिए पल्स आउटपुट भी हो सकते हैं।
पल्स काउंटर कैसे काम करता है
उनकी स्थिति निर्धारित करने के लिए एक आंतरिक रोटरी एन्कोडर के साथ पोटेंशियोमीटर हैं। दालों की संख्या को कम से कम तीन मुख्य भागों में विभाजित किया जा सकता है। समय आधार एक विशिष्ट समय या कालातीतता के साथ तय किया जा सकता है। प्रत्येक पल्स काउंटर को बढ़ाता है, संग्रहीत संख्या में वृद्धि करता है। जब अधिकतम गिनती समय बीत चुका होता है, तो नंबर डिस्प्ले या अन्य डिस्प्ले डिवाइस पर प्रदर्शित होता है। काउंटर और टाइमर को रीसेट किया जाता है और आने वाली दालों की गणना की जाती है।
पहले +5V और LCD डेटा/कंट्रोल लाइन कनेक्ट करें। फिर एलसीडी, कंट्रास्ट पोटेंशियोमीटर और पावर एलईडी।
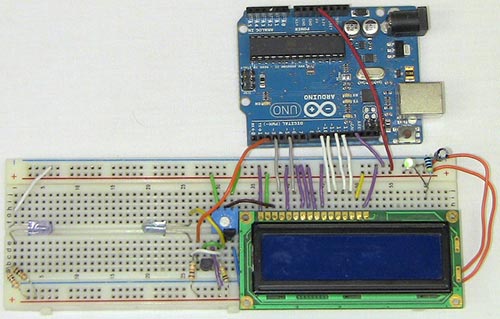
आईआर बीम को तोड़ने के लिए सर्किट को इकट्ठा किया जाता है। IR LED और फोटोट्रांसिस्टर के बीच दूरी बनाए रखने की कोशिश करें। यह तस्वीर आईआर एलईडी और फोटोट्रांसिस्टर के बीच की दूरी को दिखाती है जहां मैं कंप्यूटर प्रशंसक रखूंगा।
हार्डवेयर के बारे में पर्याप्त बात! आइए यह देखने के लिए फर्मवेयर/प्रोग्राम बनाना शुरू करें कि डिवाइस कैसे काम करता है!
सॉफ्टवेयर हिस्सा
कोड के दो मुख्य भाग हैं जो नीचे दिखाए गए हैं और विस्तृत हैं:
मुख्य एलसीडी रीफ्रेश चक्र
ब्रेक टाइम अपडेट
मुख्य चक्र में, क्रांतियों और एलसीडी अपडेट की गणना की जाती है। चूंकि मुख्य लूप एक विशाल जबकि (1) लूप है, यह हमेशा चलता रहेगा, RPM की गणना की जाएगी, और LCD प्रति सेकंड कई बार अपडेट किया जाएगा। इंटरप्ट में फ़ंक्शन IR इंटरप्ट के बीच के समय को गिनता है, इसलिए आप RPM को मुख्य लूप में गिन सकते हैं।
याद रखें कि एक कंप्यूटर पंखे में 7 ब्लेड होते हैं, इसलिए इस टैकोमीटर को केवल ऐसे प्रशंसकों के साथ काम करने के लिए डिज़ाइन किया गया है। यदि आपका पंखा या अन्य उपकरण प्रति चक्कर केवल 4 दालें देता है, तो कोड में "(समय*4)" बदलें।
टैकोमीटर कैसे काम करता है, इसका एक डेमो वीडियो यहां दिया गया है।
दोनों पंखे लगभग 3000rpm और 2600rpm पर चलते हैं, जिसमें लगभग +/-100rpm की त्रुटि होती है।
Arduino टैकोमीटर सिंहावलोकन
पंखा इंटरप्ट पल्स उत्पन्न करता है, और आउटपुट पर हम RPM देखते हैं। हालांकि सटीकता 100% नहीं है, लेकिन लगभग 95%, $ 10 की लागत के साथ, यह इस टैकोमीटर को Arduino पर बनाने के लिए समझ में आता है।
तो अब क्या है?
बीम-ब्रेक सिस्टम न केवल आरपीएम माप के लिए, बल्कि अन्य सेंसर के रूप में भी उपयोगी हैं। उदाहरण के लिए, आप जानना चाहते हैं कि कोई दरवाजा खुला है या बंद। शायद आप जानना चाहते हैं कि क्या रोबोट के नीचे कुछ चला गया है। बीम ब्रेकिंग के कई अनुप्रयोग हैं, और यहां उपयोग किया जाने वाला सर्किट इतना सरल है कि अन्य अद्भुत उपकरणों को सुधारने और बनाने के कई तरीके हैं।
निष्कर्ष
सामान्य तौर पर, मैं इस परियोजना को एक सफल मानता हूं… लेकिन यह समय और अनुभव की बात है। वैसे भी, सिस्टम इरादा के अनुसार काम करता है और काफी विश्वसनीय है, और हमें अपेक्षित परिणाम मिला है। मुझे आशा है कि आपको यह लेख पढ़ने और अपना खुद का Arduino टैकोमीटर बनाने का तरीका सीखने में मज़ा आया होगा!
पर मूल लेख अंग्रेजी भाषा(अनुवाद: अलेक्जेंडर कास्यानोव cxem.net साइट के लिए)
रोटेशन स्पीड सेंसरएफसी -03
स्पीड सेंसर मॉड्यूल या रैखिक गति. मॉड्यूल प्रकार FC-03। यह घरेलू और शैक्षिक उद्देश्यों के लिए विभिन्न तंत्रों के चलती भागों के यांत्रिक मापदंडों को नियंत्रित करने के लिए डिज़ाइन किया गया है। छोटे रोबोटिक्स के आधार प्लेटफार्मों में स्थापित होने पर, यह आपको इंजन नियंत्रण प्रणालियों को इकट्ठा करने और किसी वस्तु की गति पर नियंत्रण स्थापित करने की अनुमति देता है।
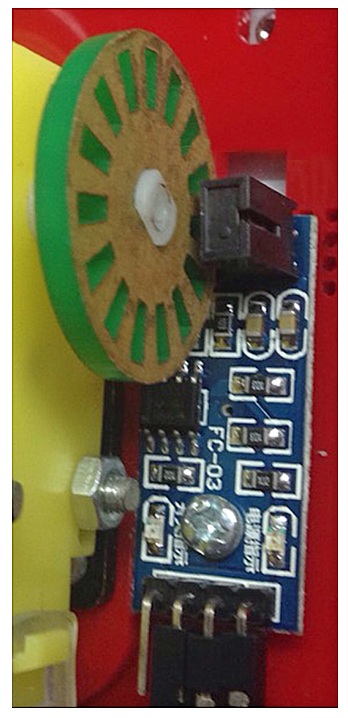
पहिएदार रोबोट के चेसिस पर रोटेशन स्पीड सेंसर FC-03 की स्थापना।
विशेषताएं
बिजली की आपूर्ति 3.3 - 5 वी
स्लॉटेड डिस्क के लिए निकासी चौड़ाई 5 मिमी
मॉड्यूल आयाम 38 x 14 x 7 मिमी
3 मिमी पेंच के लिए बढ़ते छेद
संपर्कएफसी-03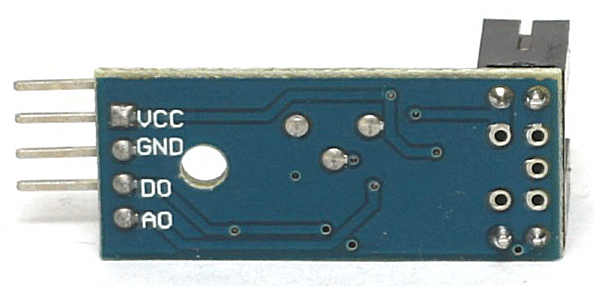
संपर्कों को बोर्ड पर चिह्नित किया गया है।
वीसीसी शक्ति है।
जीएनडी- आम तार, नकारात्मक शक्ति ध्रुव।
डीओ - पल्स सिग्नल आउटपुट।
AO - ITR9608 ऑप्टोकॉप्लर से प्रत्यक्ष आउटपुट।
परिचालन सिद्धांत
मॉड्यूल का प्राप्त करने वाला तत्व एक ऑप्टिकल जोड़ी ITR9608 है। एक इन्फ्रारेड एलईडी आवास के एक किनारे में स्थित है, जो दूसरे किनारे पर स्थित एक फोटोट्रांसिस्टर को निर्देशित करता है। यदि प्रोट्रूशियंस के बीच की खाई में एक अपारदर्शी प्लेट डाली जाती है, तो एलईडी से आईआर विकिरण अवरुद्ध हो जाता है और फोटोट्रांसिस्टर बंद हो जाता है। इस तरह के एक घटक को कभी-कभी एक फोटोइंटरप्टर कहा जाता है, लेकिन यह केवल रुकावट को रोकता है। चमकदार प्रवाह. जैसा कि ट्रांजिस्टर के एमिटर से आरेख में दिखाया गया है, सिग्नल डिवाइस सर्किट में प्रवेश करता है।
नियंत्रित तंत्र के गतिमान भाग पर लगी प्लेट द्वारा प्रकाश को अवरुद्ध कर दिया जाता है। सेंसर की मदद से, चलती विमान की चरम स्थिति में आंदोलन निर्धारित किया जाता है जब इससे जुड़ा संरचनात्मक तत्व सेंसर में प्रवेश करता है। विभिन्न यांत्रिक भागों के घूर्णी मापदंडों को मापें। इस प्रकार यांत्रिक मापदंडों को विद्युत मात्रा में और फिर प्रोग्राम मानों में परिवर्तित किया जाता है।
FC-03 रोटेशन स्पीड सेंसर का उपयोग रोटेशन स्पीड को मापने के लिए किया जाता है। इसका उपयोग रोटेशन की दिशा निर्धारित करने के लिए नहीं किया जा सकता है। छेद वाली डिस्क मोटर शाफ्ट या रेड्यूसर के गियर पर स्थापित होती है। मॉड्यूल के ऑप्टोकॉप्लर में 5 मिमी चौड़ा एक स्लॉट है। जब डिस्क घूमती है, जैसा कि एनीमेशन में दिखाया गया है, प्लेट के छेद और अनुभाग लगातार स्लॉट में वैकल्पिक होते हैं। सेंसर डिस्क तत्वों के प्रत्यावर्तन को विद्युत आवेगों में परिवर्तित करता है। मॉड्यूल के इलेक्ट्रॉनिक्स डिजिटल द्वारा सेंसर सिग्नल को पढ़ने योग्य बनाता है तर्क चिप्सया माइक्रोकंट्रोलर।
योजनाएफसी-03
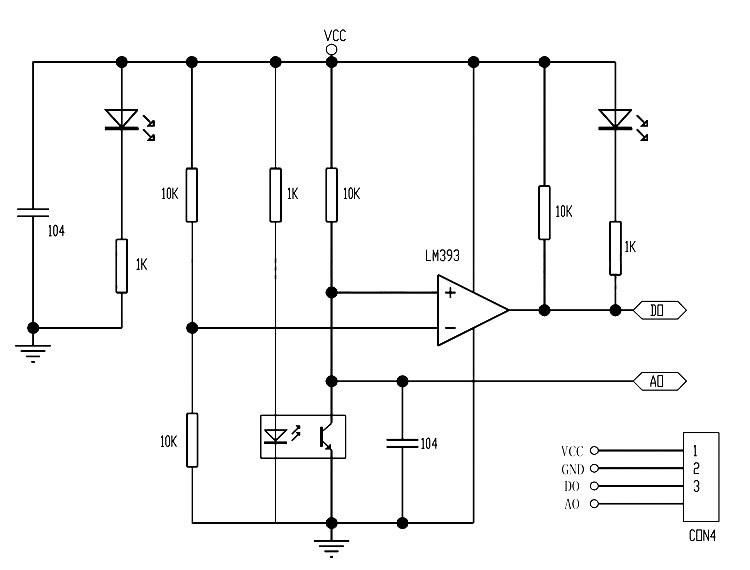
ITR9608 से संकेत LM393 तुलनित्र के इनपुट को इसके आउटपुट से D0 पिन तक खिलाया जाता है और संकेतक LED की आपूर्ति की जाती है डिजिटल सिग्नलउच्च और निम्न तर्क स्तरों से मिलकर। आउटपुट A0 को ITR9608 से लॉजिक लेवल में रूपांतरण के बिना सीधे फीड किया जाता है। LM393 तुलनित्र का उपयोग आपको चिकनी पल्स किनारों को प्राप्त करने और सेंसर आउटपुट के वर्तमान भार को थोड़ा बढ़ाने की अनुमति देता है, आउटपुट की स्थिति दिखाते हुए सर्किट में एक एलईडी स्थापित करता है।
संकेत
बोर्ड पर 2 एलईडी हैं। एक FC-03 रोटेशन स्पीड सेंसर को शामिल करता है, दूसरा सेंसर में एक बाधा की अनुपस्थिति को दर्शाता है। पहले ट्रायल रन के दौरान, दोनों एलईडी जलाई जानी चाहिए। जब ब्रेकर के खाली स्थान में धातु की प्लेट डाली जाती है, तो एक एलईडी बंद होनी चाहिए।
आवेदन पत्र
सेंसर की मदद से, न केवल रोटेशन की गति, त्वरण को मापना संभव है, बल्कि पहिए वाले रोबोट द्वारा तय की गई दूरी और खर्च किए गए इंजन के जीवन को रिकॉर्ड करना भी संभव है। पहियों के रोटेशन की गति को नियंत्रित करना विशेष रूप से महत्वपूर्ण है जब प्रत्येक पहिया अपने स्वयं के इंजन द्वारा संचालित होता है। रेक्टिलिनियर मूवमेंट के लिए, सभी पहियों के रोटेशन की गति समान होनी चाहिए, मोड़ते समय, कंट्रोल सिस्टम के एल्गोरिथम का पालन करें।
जैसे ही डिस्क घूमती है, एक ज्ञात संख्या में छेद सेंसर स्लिट को एक चक्कर में पार करते हैं। छिद्रों की संख्या की गणना करके, आप पहिया की 1 क्रांति या, उदाहरण के लिए, 15.5 क्रांति निर्धारित कर सकते हैं। प्रति इकाई समय में क्रांतियों की संख्या को मापने से, हमें पहिया के घूमने की आवृत्ति, और इसलिए वस्तु की गति प्राप्त होती है। सेंसर से संकेतों के आधार पर और समय अंतराल का सटीक मान होने पर, डिवाइस गति मापदंडों की गणना करता है। यह वह जगह है जहाँ माइक्रोकंट्रोलर काम में आता है।
निम्नलिखित Arduino प्रोग्राम आपको प्रति मिनट क्रांतियों की संख्या निर्धारित करने की अनुमति देता है और परिणामों को सीरियल टर्मिनल विंडो में आउटपुट करता है।
#define PIN_DO 2 // Arduino द्वारा इस्तेमाल किया गया पिन सेट करें
अस्थिर अहस्ताक्षरित इंट दालें;
फ्लोट आरपीएम;
अहस्ताक्षरित लंबे समय पुराना;
#define HOLES_DISC 15
शून्य काउंटर ()
{
दालें++;
}
व्यर्थ व्यवस्था()
{
सीरियल.बेगिन (9600);
पिनमोड (पिन_डीओ, इनपुट);
दालें = 0;
टाइमओल्ड = 0;
}
शून्य लूप ()
{
अगर (मिली () - टाइमओल्ड> = 1000)
{
डिटैचइंटरप्ट (डिजिटलपिनटोइंटरप्ट (पिन_डीओ));
आरपीएम = (दालें * 60) / (HOLES_DISC);
सीरियल प्रिंट्लन (आरपीएम);
टाइमओल्ड = मिली ();
दालें = 0;
अटैचइंटरप्ट (डिजिटलपिनटोइंटरप्ट (पिन_डीओ), काउंटर, फॉलिंग);