गिलहरी-पिंजरे प्रेरण मोटर क्या है। अतुल्यकालिक मोटर्स
विधुत गाड़ियाँ, बदलना विद्युतीय ऊर्जा प्रत्यावर्ती धारायांत्रिक ऊर्जा में एसी मोटर कहा जाता है।
उद्योग में, सबसे व्यापक अतुल्यकालिक मोटर्स तीन चरण वर्तमानआइए इन इंजनों के संचालन के उपकरण और सिद्धांत पर विचार करें।
एसिंक्रोनस मोटर के संचालन का सिद्धांत घूर्णन के उपयोग पर आधारित है चुंबकीय क्षेत्र.
ऐसे इंजन के संचालन को समझने के लिए हम निम्नलिखित प्रयोग करेंगे।
हम घोड़े की नाल के चुंबक को धुरी पर ठीक करते हैं ताकि इसे हैंडल से घुमाया जा सके। चुंबक के ध्रुवों के बीच हम अक्ष पर एक तांबे का सिलेंडर रखते हैं जो स्वतंत्र रूप से घूम सकता है।
चित्रा 1. घूर्णन चुंबकीय क्षेत्र प्राप्त करने के लिए सबसे सरल मॉडल
आइए घड़ी की दिशा में हैंडल से चुंबक को घुमाना शुरू करें। चुंबक का क्षेत्र भी घूमना शुरू कर देगा और घूर्णन के दौरान तांबे के सिलेंडर को बल की रेखाओं के साथ पार करेगा। सिलेंडर में, विद्युत चुम्बकीय प्रेरण के नियम के अनुसार, एड़ी धाराएं उत्पन्न होंगी, जो अपना स्वयं का चुंबकीय क्षेत्र - सिलेंडर का क्षेत्र बनाएगी। यह क्षेत्र स्थायी चुंबक के चुंबकीय क्षेत्र के साथ परस्पर क्रिया करेगा, जिससे सिलेंडर चुंबक के समान दिशा में घूमेगा।
यह स्थापित किया गया है कि सिलेंडर की घूर्णन गति चुंबक क्षेत्र की घूर्णन गति से थोड़ी कम है।
दरअसल, यदि सिलेंडर चुंबकीय क्षेत्र के समान गति से घूमता है, तो बल की चुंबकीय रेखाएं इसे पार नहीं करती हैं, और इसलिए, इसमें एड़ी धाराएं उत्पन्न नहीं होती हैं, जिससे सिलेंडर का घूर्णन होता है।
चुंबकीय क्षेत्र के घूर्णन की गति को आमतौर पर सिंक्रोनस कहा जाता है, क्योंकि यह चुंबक के घूर्णन की गति के बराबर होती है, और सिलेंडर के घूर्णन की गति को एसिंक्रोनस (गैर-सिंक्रोनस) कहा जाता है। इसलिए, मोटर को ही इंडक्शन मोटर कहा जाता था। सिलेंडर (रोटर) के घूर्णन की गति चुंबकीय क्षेत्र के घूर्णन की समकालिक गति से थोड़ी मात्रा में भिन्न होती है, जिसे पर्ची कहा जाता है।
n1 के माध्यम से रोटर के घूमने की गति और n के माध्यम से क्षेत्र के घूमने की गति को नकारते हुए, हम सूत्र का उपयोग करके प्रतिशत में पर्ची की मात्रा की गणना कर सकते हैं:
एस = (एन - एन 1) / एन।
उपरोक्त प्रयोग में, हमने एक घूर्णन चुंबकीय क्षेत्र और एक स्थायी चुंबक के घूर्णन के कारण सिलेंडर के घूर्णन के कारण प्राप्त किया, इसलिए ऐसा उपकरण अभी तक विद्युत मोटर नहीं है। बल चाहिए बिजलीएक घूर्णन चुंबकीय क्षेत्र बनाएं और रोटर को घुमाने के लिए इसका इस्तेमाल करें। इस कार्य को अपने समय में M. O. Dolivo-Dobrovolsky ने शानदार ढंग से हल किया था। उन्होंने इस उद्देश्य के लिए तीन-चरण धारा का उपयोग करने का सुझाव दिया।
एक अतुल्यकालिक इलेक्ट्रिक मोटर का उपकरण M. O. Dolivo-Dobrovolsky
चित्रा 2. एक अतुल्यकालिक इलेक्ट्रिक मोटर की योजना डोलिवो-डोब्रोवोल्स्की
तीन वाइंडिंग को एक कुंडलाकार लोहे के कोर के ध्रुवों पर रखा जाता है, जिसे इलेक्ट्रिक मोटर का स्टेटर कहा जाता है, तीन-चरण वर्तमान नेटवर्क 0 एक दूसरे के सापेक्ष 120 ° के कोण पर स्थित होता है।
कोर के अंदर, एक धातु सिलेंडर धुरी पर तय होता है, जिसे इलेक्ट्रिक मोटर का रोटर कहा जाता है।
यदि वाइंडिंग एक दूसरे से जुड़े हुए हैं जैसा कि चित्र में दिखाया गया है, और तीन-चरण वर्तमान नेटवर्क से जुड़ा है, तो तीन ध्रुवों द्वारा बनाया गया कुल चुंबकीय प्रवाह घूर्णन हो जाएगा।
चित्र 3 मोटर वाइंडिंग में धाराओं में परिवर्तन और एक घूर्णन चुंबकीय क्षेत्र के उद्भव की प्रक्रिया को दर्शाता है।
आइए इस प्रक्रिया पर करीब से नज़र डालें।
चित्रा 3. एक घूर्णन चुंबकीय क्षेत्र प्राप्त करना
ग्राफ पर स्थिति "ए" में, पहले चरण में वर्तमान शून्य है, दूसरे चरण में यह नकारात्मक है, और तीसरे चरण में यह सकारात्मक है। पोल कॉइल के माध्यम से करंट चित्र में तीरों द्वारा इंगित दिशा में प्रवाहित होगा।
दाहिने हाथ के नियम द्वारा धारा द्वारा निर्मित चुंबकीय प्रवाह की दिशा निर्धारित करने के बाद, हम यह सुनिश्चित करेंगे कि दक्षिणी ध्रुव (S) तीसरे कॉइल के ध्रुव (रोटर का सामना करना पड़) के आंतरिक छोर पर बनाया जाएगा, और उत्तरी ध्रुव (C) दूसरी कुंडली के ध्रुव पर बनाया जाएगा। कुल चुंबकीय प्रवाह दूसरे कॉइल के ध्रुव से रोटर के माध्यम से तीसरे कॉइल के ध्रुव तक निर्देशित किया जाएगा।
ग्राफ पर स्थिति "बी" में, दूसरे चरण में वर्तमान शून्य है, पहले चरण में यह सकारात्मक है, और तीसरे चरण में यह नकारात्मक है। ध्रुव कुंडल के माध्यम से बहने वाली धारा पहली कुंडली के अंत में एक दक्षिणी ध्रुव (S) और तीसरी कुंडली के अंत में एक उत्तरी ध्रुव (C) बनाती है। कुल चुंबकीय प्रवाह अब तीसरे ध्रुव से रोटर के माध्यम से पहले ध्रुव तक निर्देशित किया जाएगा, यानी ध्रुव 120 डिग्री आगे बढ़ेंगे।
ग्राफ पर स्थिति "बी" में, तीसरे चरण में वर्तमान शून्य है, दूसरे चरण में यह सकारात्मक है, और पहले चरण में यह नकारात्मक है। अब पहली और दूसरी कॉइल से बहने वाली धारा पहली कॉइल के ध्रुव के अंत में एक उत्तरी ध्रुव (C) और दूसरी कॉइल के ध्रुव के अंत में एक दक्षिणी ध्रुव (S) बनाएगी, यानी ध्रुवता कुल चुंबकीय क्षेत्र का एक और 120 ° हिल जाएगा। ग्राफ़ पर "G" की स्थिति में, चुंबकीय क्षेत्र एक और 120 ° गति करेगा।
इस प्रकार, स्टेटर वाइंडिंग्स (ध्रुवों) में धारा की दिशा में परिवर्तन के साथ कुल चुंबकीय प्रवाह अपनी दिशा बदल देगा।
इस मामले में, वाइंडिंग में वर्तमान परिवर्तन की एक अवधि में, चुंबकीय प्रवाह एक पूर्ण क्रांति करेगा। घूर्णन चुंबकीय प्रवाह सिलेंडर को अपने साथ खींचेगा, और इस तरह से हम प्राप्त करेंगे अतुल्यकालिक इलेक्ट्रिक मोटर.
याद रखें कि चित्र 3 में स्टेटर वाइंडिंग एक "तारे" से जुड़े हुए हैं, हालांकि, एक घूर्णन चुंबकीय क्षेत्र भी बनता है जब वे एक "त्रिकोण" से जुड़े होते हैं।
यदि हम दूसरे और तीसरे चरण की वाइंडिंग की अदला-बदली करते हैं, तो चुंबकीय प्रवाह इसके घूमने की दिशा को विपरीत दिशा में बदल देगा।
स्टेटर वाइंडिंग्स को स्वैप किए बिना एक ही परिणाम प्राप्त किया जा सकता है, लेकिन नेटवर्क के दूसरे चरण के वर्तमान को स्टेटर के तीसरे चरण में और नेटवर्क के तीसरे चरण को स्टेटर के दूसरे चरण में निर्देशित करके।
इस प्रकार, किसी भी दो चरणों को बदलकर चुंबकीय क्षेत्र के घूर्णन की दिशा को बदला जा सकता है।
हमने स्टेटर पर तीन वाइंडिंग के साथ एक अतुल्यकालिक मोटर के उपकरण पर विचार किया। इस मामले में, घूर्णन चुंबकीय क्षेत्र द्विध्रुवी है और एक सेकंड में इसके क्रांतियों की संख्या एक सेकंड में वर्तमान परिवर्तन अवधि की संख्या के बराबर है।
यदि स्टेटर की परिधि के चारों ओर छह घुमाव रखे जाते हैं, तो एक चार-ध्रुव घूर्णन चुंबकीय क्षेत्र बनाया जाएगा। नौ वाइंडिंग के साथ, क्षेत्र छह-ध्रुव होगा।
तीन-चरण की वर्तमान आवृत्ति f के साथ 50 अवधि प्रति सेकंड या 3000 प्रति मिनट के बराबर, घूर्णन क्षेत्र के प्रति मिनट क्रांतियों की संख्या होगी:
दो-पोल स्टेटर n \u003d (50 x 60) / 1 \u003d 3000 आरपीएम के साथ,
चार-पोल स्टेटर n \u003d (50 x 60) / 2 \u003d 1500 आरपीएम के साथ,
छह-पोल स्टेटर n \u003d (50 x 60) / 3 \u003d 1000 आरपीएम के साथ,
p: n = (f x 60) / p के बराबर स्टेटर पोल के जोड़े की संख्या के साथ,
तो, हमने चुंबकीय क्षेत्र के घूर्णन की गति और मोटर स्टेटर पर घुमावों की संख्या पर इसकी निर्भरता स्थापित की है।
जैसा कि हम जानते हैं, इंजन का रोटर अपने रोटेशन में कुछ पीछे रह जाएगा।
हालांकि, रोटर लैग बहुत छोटा है। तो, उदाहरण के लिए, जब सुस्तीइंजन, गति अंतर केवल 3% है, और 5 - 7% के भार पर। नतीजतन, जब लोड बदलता है, तो इंडक्शन मोटर की गति बहुत कम सीमा के भीतर बदल जाती है, जो कि इसके फायदों में से एक है।
अब अतुल्यकालिक इलेक्ट्रिक मोटर्स के उपकरण पर विचार करें
आधुनिक एसिंक्रोनस इलेक्ट्रिक मोटर के स्टेटर में अनपेक्षित पोल होते हैं, यानी स्टेटर की आंतरिक सतह पूरी तरह से चिकनी होती है।
एड़ी के करंट के नुकसान को कम करने के लिए, स्टेटर कोर को पतली स्टैम्प्ड स्टील शीट से बनाया जाता है। इकट्ठे स्टेटर कोर को स्टील के मामले में तय किया गया है।
स्टेटर स्लॉट्स में कॉपर वायर वाइंडिंग बिछाई जाती है। इलेक्ट्रिक मोटर के स्टेटर की फेज वाइंडिंग एक "स्टार" या "ट्राएंगल" से जुड़ी होती है, जिसके लिए वाइंडिंग की सभी शुरुआत और छोर को एक विशेष इंसुलेटिंग शील्ड में लाया जाता है। ऐसा स्टेटर डिवाइस बहुत सुविधाजनक है, क्योंकि यह आपको विभिन्न मानक वोल्टेज के लिए इसकी वाइंडिंग को चालू करने की अनुमति देता है।
एक इंडक्शन मोटर का रोटर, स्टेटर की तरह, स्टैम्प्ड स्टील शीट से इकट्ठा किया जाता है। घुमावदार रोटर के खांचे में रखी गई है।
रोटर के डिजाइन के आधार पर, एसिंक्रोनस इलेक्ट्रिक मोटर्स को गिलहरी-पिंजरे रोटर और एक चरण रोटर के साथ मोटर्स में विभाजित किया जाता है।
गिलहरी-पिंजरे रोटर की वाइंडिंग रोटर के खांचे में रखी तांबे की छड़ से बनी होती है। छड़ के सिरे तांबे की अंगूठी से जुड़े होते हैं। इस तरह की वाइंडिंग को "गिलहरी केज" वाइंडिंग कहा जाता है। ध्यान दें कि खांचे में तांबे की छड़ें अछूता नहीं हैं।
कुछ इंजनों में, "गिलहरी केज" को कास्ट रोटर से बदल दिया जाता है।
एक चरण रोटर के साथ एक अतुल्यकालिक मोटर (स्लिप रिंग के साथ) आमतौर पर उच्च-शक्ति वाले इलेक्ट्रिक मोटर्स में और उन मामलों में उपयोग किया जाता है; जब यह आवश्यक हो कि इलेक्ट्रिक मोटर स्टार्ट करते समय एक बड़ा बल उत्पन्न करे। यह इस तथ्य से हासिल किया जाता है कि वाइंडिंग में चरण मोटरप्रारंभिक रिओस्तात चालू है।
गिलहरी-पिंजरे इंडक्शन मोटर्स को दो तरह से शुरू किया जाता है:
1) सीधा कनेक्शन तीन चरण वोल्टेजमोटर स्टेटर के लिए नेटवर्क। यह विधि सबसे आसान और सबसे लोकप्रिय है।
2) स्टेटर वाइंडिंग को आपूर्ति की गई वोल्टेज को कम करना। वोल्टेज कम हो जाता है, उदाहरण के लिए, स्टेटर वाइंडिंग को स्टार से डेल्टा में स्विच करके।
जब स्टेटर वाइंडिंग एक तारे से जुड़ी होती है, तब इंजन चालू होता है, और जब रोटर सामान्य गति तक पहुँच जाता है, तो स्टेटर वाइंडिंग डेल्टा कनेक्शन पर स्विच हो जाता है।
इंजन को शुरू करने की इस पद्धति के साथ आपूर्ति तारों में वर्तमान की तुलना में 3 गुना कम हो जाता है जो कि "डेल्टा" से जुड़े स्टेटर वाइंडिंग के साथ नेटवर्क से सीधे कनेक्शन द्वारा इंजन शुरू करते समय होता है। हालांकि, यह विधि केवल तभी उपयुक्त है जब स्टेटर को सामान्य संचालन के लिए डिज़ाइन किया गया हो, जब इसकी वाइंडिंग "त्रिकोण" में जुड़ी हो।
सबसे सरल, सस्ता और सबसे विश्वसनीय एक गिलहरी-पिंजरे रोटर के साथ एक अतुल्यकालिक इलेक्ट्रिक मोटर है, लेकिन इस मोटर के कुछ नुकसान हैं - कम शुरुआती बल और उच्च प्रारंभिक धारा। चरण रोटर के उपयोग से इन कमियों को काफी हद तक समाप्त कर दिया जाता है, लेकिन इस तरह के रोटर के उपयोग से इंजन की लागत में काफी वृद्धि होती है और इसके लिए एक प्रारंभिक रिओस्टेट की आवश्यकता होती है।
परिचालन सिद्धांत
एसिंक्रोनस इलेक्ट्रिक मोटर के संचालन का सिद्धांत रोटर के प्रेरित प्रवाह की स्टेटर के चुंबकीय प्रवाह के साथ बातचीत पर आधारित है। वाइंडिंग चालू करते समय तीन चरण मोटरतीन-चरण प्रत्यावर्ती धारा स्रोत के वोल्टेज के तहत, स्टेटर बोर के अंदर एक घूर्णन चुंबकीय क्षेत्र बनता है, जिसकी रोटेशन आवृत्ति बराबर होती है
n1=60fp
जहां n1 चुंबकीय क्षेत्र के घूर्णन की आवृत्ति है, आरपीएम; एफ - वर्तमान आवृत्ति, हर्ट्ज; p मोटर के चुंबकीय ध्रुवों के जोड़े की संख्या है।
घूर्णन चुंबकीय क्षेत्र के बल की रेखाएं रोटर के शॉर्ट-सर्किट वाइंडिंग की छड़ को पार करती हैं, और उनमें एक ईएमएफ प्रेरित होता है, जो मोटर रोटर में वर्तमान और चुंबकीय प्रवाह की उपस्थिति का कारण बनता है।
रोटर चुंबकीय प्रवाह के साथ स्टेटर चुंबकीय क्षेत्र की बातचीत एक यांत्रिक टोक़ बनाती है, जिसके प्रभाव में रोटर घूमना शुरू कर देता है। रोटर की गति चुंबकीय क्षेत्र की गति से थोड़ी कम होती है। इसलिए, मोटर को एसिंक्रोनस कहा जाता है।
सापेक्ष इकाइयों में चुंबकीय क्षेत्र से रोटर के अंतराल को दर्शाने वाले मान को स्लिप कहा जाता है, इसकी गणना सूत्र द्वारा की जाती है
एस = (n1−n2)/n1,
जहां एस - पर्ची (रिश्तेदार .) कोणीय गति); n1 - चुंबकीय क्षेत्र के रोटेशन की आवृत्ति, आरपीएम; n2 - नाममात्र रोटर गति, आरपीएम।
मोटर को नेटवर्क से जोड़ने के लिए, इसके स्टेटर वाइंडिंग को "स्टार" या "डेल्टा" में जोड़ा जाना चाहिए।
चावल। 4 कनेक्शन आरेख:
ए - त्रिकोण, बी - स्टार।
"त्रिकोण" योजना के अनुसार इंजन को चालू करने के लिए, आपको पहली वाइंडिंग की शुरुआत को दूसरे के अंत से, दूसरी वाइंडिंग की शुरुआत को तीसरे के अंत तक और तीसरे की शुरुआत से कनेक्ट करने की आवश्यकता है। पहले का अंत। वाइंडिंग के कनेक्शन बिंदु नेटवर्क के तीन चरणों से जुड़े होते हैं (चित्र 4, ए)।
"स्टार" योजना के अनुसार इंजन को नेटवर्क से जोड़ने के लिए, वाइंडिंग के सभी सिरों को विद्युत रूप से एक बिंदु से जोड़ना आवश्यक है, और वाइंडिंग की सभी शुरुआत को नेटवर्क के चरणों से जोड़ना है (चित्र 4)। , बी)।
वायरिंग आरेख हमेशा कवर के पीछे की तरफ दिखाए जाते हैं जो मोटर टर्मिनल बॉक्स को बंद कर देता है।
तीन-चरण अतुल्यकालिक मोटर के रोटेशन की दिशा बदलने के लिए, मोटर स्विचिंग सर्किट की परवाह किए बिना, नेटवर्क के किसी भी दो चरणों को स्वैप करने के लिए पर्याप्त है। मोटर के रोटेशन की दिशा को जल्दी से बदलने के लिए, रिवर्सिंग स्विच, बैच स्विच या रिवर्सिंग मैग्नेटिक स्टार्टर्स का उपयोग किया जाता है।
गिलहरी-पिंजरे रोटर के साथ एक तीन-चरण अतुल्यकालिक इलेक्ट्रिक मोटर, डिजाइन की सादगी, संचालन में उच्च विश्वसनीयता, स्थायित्व, कम लागत और बहुमुखी प्रतिभा के साथ, एक महत्वपूर्ण कमी है: जब इसे शुरू किया जाता है, तो एक दबाव वर्तमान होता है, का मूल्य जो है 5-7 बारनाममात्र से अधिक। बड़ी प्रारंभिक धारा विद्युत नेटवर्कआमतौर पर गणना नहीं की जाती है, वोल्टेज में उल्लेखनीय कमी का कारण बनता है, जो बदले में, पड़ोसी विद्युत रिसीवर के स्थिर संचालन पर प्रतिकूल प्रभाव डालता है।
उच्च-शक्ति तीन-चरण अतुल्यकालिक गिलहरी-पिंजरे मोटर्स की शुरुआती धाराओं को कम करने के लिए, उन्हें स्टार-टू-डेल्टा सर्किट स्विच का उपयोग करके स्विच किया जाता है। इस मामले में, पहले मोटर वाइंडिंग को "स्टार" योजना के अनुसार जोड़ा जाता है, फिर, मोटर रोटर रेटेड गति तक पहुंचने के बाद, इसकी वाइंडिंग को "त्रिकोण" योजना में बदल दिया जाता है।
पतन आरंभिक बहावएक तारे से डेल्टा में अपनी वाइंडिंग को स्विच करने पर मोटर होती है क्योंकि किसी दिए गए मुख्य वोल्टेज के लिए "त्रिकोण" सर्किट के बजाय, प्रत्येक मोटर वाइंडिंग को √3 गुना कम वोल्टेज के लिए स्विच किया जाता है, और वर्तमान खपत एक कारक से कम हो जाती है तीन का। स्टार्ट-अप पर इलेक्ट्रिक मोटर द्वारा विकसित शक्ति भी तीन के कारक से कम हो जाती है। इसलिए, शुरुआती करंट को कम करने की वर्णित विधि का उपयोग केवल रेटेड के 1/3 से अधिक के लोड पर ही किया जा सकता है।
एसिंक्रोनस मशीन एक एसी इलेक्ट्रिक मशीन है, जिसकी रोटर गति स्टेटर वाइंडिंग करंट द्वारा बनाए गए चुंबकीय क्षेत्र की गति के बराबर (मोटर मोड में कम) नहीं होती है।
कई देशों में, कम्यूटेटर मशीनों को एसिंक्रोनस मशीनों के रूप में भी वर्गीकृत किया जाता है। एसिंक्रोनस मशीनों का दूसरा नाम इंडक्शन है क्योंकि रोटर वाइंडिंग में करंट स्टेटर के घूमने वाले क्षेत्र से प्रेरित होता है। अतुल्यकालिक मशीनें आज अधिकांश विद्युत मशीनें बनाती हैं। वे मुख्य रूप से इलेक्ट्रिक मोटर्स के रूप में उपयोग किए जाते हैं और विद्युत ऊर्जा के यांत्रिक ऊर्जा में मुख्य कन्वर्टर्स हैं।
लाभ: निर्माण में आसान मशीन के स्थिर भाग के साथ कोई यांत्रिक संपर्क नहीं।
नुकसान: छोटा स्टार्टिंग टॉर्क। महत्वपूर्ण स्टार्टिंग करंट।
एक एसिंक्रोनस मशीन में एक स्टेटर और रोटर होता है जो एक एयर गैप से अलग होता है। इसके सक्रिय भाग वाइंडिंग और एक चुंबकीय सर्किट (कोर) हैं; अन्य सभी भाग संरचनात्मक हैं, जो आवश्यक शक्ति, कठोरता, शीतलन, घूर्णन की संभावना आदि प्रदान करते हैं।
स्टेटर वाइंडिंग एक तीन-चरण (सामान्य रूप से, बहु-चरण) वाइंडिंग है, जिसके कंडक्टर समान रूप से स्टेटर की परिधि के आसपास वितरित किए जाते हैं और 120 एल डिग्री की कोणीय दूरी के साथ खांचे में चरण दर चरण बिछाए जाते हैं। स्टेटर वाइंडिंग के चरण मानक "त्रिकोण" या "स्टार" योजनाओं के अनुसार जुड़े हुए हैं और तीन-चरण वर्तमान नेटवर्क से जुड़े हैं। स्टेटर वाइंडिंग में करंट को बदलने की प्रक्रिया में स्टेटर मैग्नेटिक सर्किट को रीमैग्नेटाइज़ किया जाता है, इसलिए इसे न्यूनतम चुंबकीय नुकसान सुनिश्चित करने के लिए इलेक्ट्रिकल स्टील प्लेट्स से भर्ती किया जाता है। एक पैकेज में चुंबकीय सर्किट को इकट्ठा करने की मुख्य विधि सम्मिश्रण है।
रोटर के डिजाइन के अनुसार, अतुल्यकालिक मशीनों को दो मुख्य प्रकारों में विभाजित किया जाता है: एक गिलहरी-पिंजरे रोटर के साथ और एक चरण रोटर के साथ। दोनों प्रकारों में एक ही स्टेटर डिज़ाइन होता है और केवल रोटर वाइंडिंग के डिज़ाइन में भिन्न होता है। रोटर चुंबकीय सर्किट को स्टेटर चुंबकीय सर्किट के समान बनाया जाता है - विद्युत स्टील प्लेटों से।
परिचालन सिद्धांत
स्टेटर वाइंडिंग्स पर एक वोल्टेज लगाया जाता है, जिसकी क्रिया के तहत इन वाइंडिंग्स से करंट प्रवाहित होता है और एक घूर्णन चुंबकीय क्षेत्र बनाता है। चुंबकीय क्षेत्र रोटर वाइंडिंग पर कार्य करता है और, विद्युत चुम्बकीय प्रेरण के नियम के अनुसार, उनमें एक EMF प्रेरित करता है। रोटर वाइंडिंग में, प्रेरित ईएमएफ की कार्रवाई के तहत, एक करंट उत्पन्न होता है। रोटर वाइंडिंग में करंट अपना चुंबकीय क्षेत्र बनाता है, जो स्टेटर के घूमने वाले चुंबकीय क्षेत्र के साथ इंटरैक्ट करता है। नतीजतन, रोटर चुंबकीय सर्किट के प्रत्येक दांत पर एक बल कार्य करता है, जो परिधि के चारों ओर जोड़कर एक घूर्णन विद्युत चुम्बकीय क्षण बनाता है जो रोटर को घुमाने का कारण बनता है।
इलेक्ट्रिक मोटर्स के बीच सबसे व्यापक एक तीन-चरण अतुल्यकालिक मोटर थी, जिसे पहले प्रसिद्ध रूसी इलेक्ट्रीशियन एम.ओ. डोलिवो-डोब्रोवोल्स्की द्वारा डिज़ाइन किया गया था।
एसिंक्रोनस मोटर को इसके सरल डिजाइन और रखरखाव में आसानी से अलग किया जाता है। किसी भी एसी मशीन की तरह, एक इंडक्शन मोटर में दो मुख्य भाग होते हैं; स्टेटर और रोटर। स्टेटर मशीन का स्थिर हिस्सा है, रोटर घूमने वाला हिस्सा है। एक अतुल्यकालिक मशीन में उत्क्रमणीयता का गुण होता है, अर्थात इसका उपयोग जनरेटर मोड और इंजन मोड दोनों में किया जा सकता है। कई महत्वपूर्ण कमियों के कारण, अतुल्यकालिक जनरेटर का लगभग कभी उपयोग नहीं किया जाता है, जबकि अतुल्यकालिक मोटर्स, जैसा कि ऊपर उल्लेख किया गया है, बहुत व्यापक हो गए हैं।
इसलिए, हम इंजन मोड में एक अतुल्यकालिक मशीन के संचालन पर विचार करेंगे, अर्थात विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित करने की प्रक्रिया।
एक पॉलीफ़ेज़ एसी वाइंडिंग एक घूर्णन चुंबकीय क्षेत्र बनाता है, जिसकी घूर्णन गति प्रति मिनट
यदि रोटर चुंबकीय क्षेत्र (n2=n1) के घूर्णन की गति के बराबर n2 गति से घूमता है, तो इस गति को तुल्यकालिक कहा जाता है।
यदि रोटर चुंबकीय क्षेत्र के घूर्णन की गति के बराबर गति से घूमता है ( n2n1), तो इस गति को एसिंक्रोनस कहा जाता है।
एक एसिंक्रोनस मोटर में, काम करने की प्रक्रिया केवल एसिंक्रोनस गति से आगे बढ़ सकती है, यानी रोटर गति पर जो चुंबकीय क्षेत्र रोटेशन गति के बराबर नहीं है।
रोटर की गति जूल की गति से बहुत कम भिन्न हो सकती है, लेकिन जब इंजन चल रहा हो, तो यह हमेशा कम रहेगा (n2 इंडक्शन मोटर का संचालन अरागो-लेनज़ डिस्क (चित्र। 108) नामक एक घटना पर आधारित है। यह घटना इस प्रकार है: यदि आप एक तांबे की डिस्क 1 को स्थायी चुंबक के ध्रुवों के सामने रखते हैं, स्वतंत्र रूप से अक्ष 2 पर बैठे हैं, और चुंबक को अपनी धुरी के चारों ओर एक हैंडल से घुमाना शुरू करते हैं, तो तांबे की डिस्क उसी में घूमेगी दिशा। यह इस तथ्य से समझाया गया है कि जब चुंबक घूमता है, तो उसके क्षेत्र की चुंबकीय रेखाएं, उत्तरी ध्रुव से दक्षिण की ओर बंद होकर, डिस्क में प्रवेश करती हैं और इसमें एड़ी धाराओं को प्रेरित करती हैं, चुंबकीय के साथ एड़ी धाराओं की बातचीत के परिणामस्वरूप चुंबक के क्षेत्र में, एक बल उत्पन्न होता है जो डिस्क को घुमाने का कारण बनता है। लेन्ज़ के नियम के आधार पर किसी भी प्रेरित धारा की दिशा ऐसी होती है कि वह उस कारण का विरोध करती है जिससे वह उत्पन्न होता है। इसलिए, डिस्क के शरीर में एडी धाराएं चुंबक के घूर्णन में देरी करती हैं, लेकिन ऐसा करने में असमर्थ होने के कारण डिस्क को घुमाने का कारण बनता है ताकि वह चुंबक का अनुसरण कर सके। इस मामले में, डिस्क के घूमने की गति हमेशा चुंबक के घूमने की गति से कम होती है। यदि किसी कारण से ये गति समान हो जाती है, तो चुंबकीय पट्टा डिस्क को पार नहीं करेगा और, परिणामस्वरूप, इसमें एड़ी धाराएं उत्पन्न नहीं होंगी, अर्थात, कोई बल नहीं होगा जिसके प्रभाव में डिस्क घूमती है। अतुल्यकालिक मोटर्स में, एक स्थायी चुंबक को तीन-चरण स्टेटर वाइंडिंग द्वारा बनाए गए घूर्णन चुंबकीय क्षेत्र द्वारा प्रतिस्थापित किया जाता है, जब यह एक वैकल्पिक वर्तमान नेटवर्क से जुड़ा होता है। स्टेटर का घूर्णन चुंबकीय क्षेत्र रोटर वाइंडिंग के कंडक्टरों को पार करता है और उनमें एक ईएमएफ उत्पन्न करता है। साथ। यदि रोटर वाइंडिंग को किसी प्रतिरोध या शॉर्ट-सर्किट के लिए बंद कर दिया जाता है, तो प्रेरित ई के प्रभाव में। डी.एस. वर्तमान प्रवाह। नतीजतन, स्टेटर घुमावदार क्षेत्र द्वारा एक टोक़ बनाया जाता है, जिसके प्रभाव में रोटर घूमना शुरू कर देता है। उदाहरण के लिए, आइए रोटर परिधि के एक हिस्से का चयन करें, जिस पर इसकी वाइंडिंग का एक कंडक्टर है। स्टेटर फ़ील्ड को उत्तरी ध्रुव N द्वारा दर्शाया जाता है, जो अंतरिक्ष में और रोटर के चारों ओर घूमता है, जिसमें कई चक्कर N प्रति मिनट होते हैं। नतीजतन, ध्रुव एन बाएं से दाएं रोटर घुमावदार के कंडक्टर के सापेक्ष चलता है, जिसके परिणामस्वरूप इस कंडक्टर में एक ईएमएफ प्रेरित होता है। s, जो दाहिने हाथ के नियम के अनुसार, दर्शक (चिह्न "डॉट") पर निर्देशित होता है। यदि रोटर वाइंडिंग बंद है, तो ई की कार्रवाई के तहत। डी.एस. इस वाइंडिंग के माध्यम से एक करंट प्रवाहित होता है, जिसे कंडक्टर में निर्देशित किया जाता है जिसे हमने दर्शक की ओर भी चुना है। चुंबकीय क्षेत्र के साथ घुमावदार रोटर के कंडक्टर में करंट की परस्पर क्रिया के परिणामस्वरूप, एक बल F उत्पन्न होता है, जो कंडक्टर को बाएं हाथ के नियम द्वारा निर्धारित दिशा में ले जाता है, अर्थात। बाएं से दाएं। कंडक्टर के साथ, रोटर भी चलना शुरू कर देता है। यदि रोटर वाइंडिंग के कंडक्टर पर अभिनय करने वाले बल F को रोटर के अक्ष (बल अनुप्रयोग के कंधे) से इस कंडक्टर की दूरी से गुणा किया जाता है, तो हम इस कंडक्टर के करंट द्वारा विकसित टॉर्क प्राप्त करते हैं। चूंकि रोटर पर बड़ी संख्या में कंडक्टर लगाए जाते हैं, रोटर अक्ष से इन कंडक्टरों की दूरी पर प्रत्येक कंडक्टर पर अभिनय करने वाले बलों के उत्पादों का योग इंजन द्वारा विकसित टोक़ को निर्धारित करता है। टोक़ की क्रिया के तहत, रोटर चुंबकीय क्षेत्र के घूर्णन की दिशा में घूर्णन में आता है। इसलिए, मोटर को उलटने के लिए, यानी रोटर के रोटेशन की दिशा बदलने के लिए, स्टेटर वाइंडिंग द्वारा बनाए गए चुंबकीय क्षेत्र के रोटेशन की दिशा को बदलना आवश्यक है। यह स्टेटर वाइंडिंग के चरण अनुक्रम को बदलकर प्राप्त किया जाता है; जिसके लिए नेटवर्क टर्मिनलों के संबंध में स्टेटर वाइंडिंग को नेटवर्क से जोड़ने वाले तीन में से किन्हीं दो तारों को स्वैप करना आवश्यक है। प्रतिवर्ती मोटर्स स्विच से लैस हैं, जिसके साथ आप स्टेटर वाइंडिंग के चरण अनुक्रम को बदल सकते हैं, और इसलिए रोटर के रोटेशन की दिशा। रोटर के घूर्णन की दिशा के बावजूद, इसकी गति n2, जैसा कि पहले ही उल्लेख किया गया है, हमेशा स्टेटर चुंबकीय क्षेत्र की गति से कम होती है। यदि हम यह मान लें कि किसी समय रोटर के क्रांतियों की संख्या स्टेटर क्षेत्र के क्रांतियों की संख्या के बराबर हो गई है, तो रोटर वाइंडिंग के कंडक्टर स्टेटर क्षेत्र की चुंबकीय रेखाओं को नहीं काटेंगे और वहां रोटर में कोई करंट नहीं होगा। इस मामले में, टोक़ शून्य के बराबर हो जाएगा, रोटर की घूर्णन गति स्टेटर क्षेत्र की घूर्णन गति की तुलना में घट जाएगी, जब तक कि एक टोक़ नहीं होता जो ब्रेकिंग टोक़ को संतुलित करता है जो पल का योग होता है; शाफ्ट पर भार और मशीन में घर्षण बल का क्षण। मौजूदा इलेक्ट्रिक मोटर्स में सबसे लोकप्रिय अभी भी एसिंक्रोनस मोटर है, जिसे 19वीं शताब्दी में बनाया गया था। इसका डिजाइन सरलता से सरल और इतना सफल निकला कि आगे के सभी परिवर्तनों ने संचालन के सिद्धांत की चिंता नहीं की, केवल कुछ हिस्सों की निर्माण तकनीक को प्रभावित किया। उदाहरण के लिए, जिन बीयरिंगों पर मोटर शाफ्ट जुड़ा हुआ था, उन्हें संशोधित किया जा सकता है, रोटर और स्टेटर वाइंडिंग का आकार बदल गया है, लेकिन एक अतुल्यकालिक मोटर के संचालन का सिद्धांत समान रहा। इस प्रकार की इलेक्ट्रिक मोटर के आयामों के बावजूद, इसका उपकरण समान होगा। एक उदाहरण के रूप में विचार करना आसान है तीन चरण इलेक्ट्रिक मोटर. इस तरह के मोटर्स कारखाने के फर्श में काम करते हैं - कन्वेयर पर और मशीन टूल्स में, लिफ्ट कार को गति में सेट करते हैं - घरों और खानों में, पंप टरबाइन को घुमाकर पानी पंप करें - दोनों एक छोटे से कुएं में और शक्तिशाली पानी के सेवन स्टेशनों पर। तीन-चरण उपकरणों का दायरा विस्तृत है। पैदा होने वाला पहला तीन-चरण इलेक्ट्रिक मोटर था, जिसके संचालन का सिद्धांत बनाया गया था विद्युत चुम्बकीय क्षेत्रों की बातचीत पर. इंडक्शन मोटर के मुख्य भाग स्टेटर और रोटर हैं। तदनुसार, जो भाग गतिहीन रहता है उसे स्टेटर कहा जाता था। यह वह है जो सीधे डिवाइस के बाहरी आवरण के नीचे स्थित है और इसमें एक सिलेंडर का आकार है। इस भाग में, तीन वाइंडिंग एक सर्कल में स्थित हैं - एक दूसरे से 120 ° के कोण पर। आधुनिक मोटर्स में, कई वाइंडिंग को गिना जा सकता है, हालांकि, वे एक-दूसरे से जुड़े होते हैं ताकि प्रत्येक क्रमिक चरण में पिछले एक से भिन्न हो, और आसन्न वाइंडिंग के बीच चरण शिफ्ट 120 ° हो। वाइंडिंग तांबे के तार से घाव कर रहे हैं, और इसके चरण से वोल्टेज प्रत्येक समूह से जुड़ा हुआ है। इस प्रकार, यह पता चला है कि चुंबकीय क्षेत्र इन वाइंडिंग्स के साथ चलता है, जैसे कि एक रिंग में बंद हो रहा हो। स्टेटर की अपनी वाइंडिंग भी होती है। चूंकि स्टेटर को बिजली की आपूर्ति नहीं की जाती है, इसलिए इसका अधिकार है बंद कंडक्टर, जो कभी-कभी वाइंडिंग के बजाय तथाकथित गिलहरी के पिंजरे के रूप में बनता है। अधिक सटीक होने के लिए, यह विवरण एक फुर्तीले कृंतक के लिए पिंजरे जैसा नहीं है, बल्कि एक गिलहरी का पहिया है, जिसे जानवर की अपरिवर्तनीय ऊर्जा को बाहर निकालने के लिए डिज़ाइन किया गया है। डिवाइस के रोटर में, टाइप किए गए स्टील शीट से बने कोर के खांचे में पिघला हुआ एल्यूमीनियम डालने से "गिलहरी पिंजरे" का निर्माण होता है। ऐसे उपकरण को गिलहरी-पिंजरे का रोटर कहा जाता है। यदि स्टेटर को वास्तविक वाइंडिंग के साथ बनाया जाता है, तो इसे आमतौर पर मल्टी-पोल बनाया जाता है। ऐसे रोटर को फेज रोटर कहा जाता है। इस रोटर की वाइंडिंग एक तारे या एक त्रिभुज से बंद होती है। रोटर का अपना शाफ्ट होता है, जो रियर और फ्रंट बेयरिंग द्वारा समर्थित होता है। वे, बदले में, मोटर आवास से जुड़ाताकि स्टेटर के अंदर रोटर स्वतंत्र रूप से घूम सके। अतुल्यकालिक मोटर्स के संचालन का सिद्धांत इस तथ्य पर आधारित है कि स्टेटर द्वारा वाइंडिंग या "गिलहरी के पहिये" में एक चुंबकीय क्षेत्र प्रेरित होता है। इसकी क्रिया के तहत, रोटर के कंडक्टरों में एक करंट दिखाई देता है, और इसके साथ इसका अपना चुंबकीय क्षेत्र होता है। स्टेटर का वैकल्पिक चुंबकीय क्षेत्र रोटर को अपने साथ खींचता है, और यह घूमना शुरू कर देता है। लेकिन रोटर चुंबकीय क्षेत्र हमेशा स्टेटर क्षेत्र के सापेक्ष पिछड़ जाता है, और दोनों क्षेत्रों का घूर्णन समकालिक रूप से नहीं हो सकता है। यह रोटर को उस पर काम करने वाली कई ताकतों को दूर करने के लिए मजबूर करता है: उत्तरार्द्ध बल कई क्षणों पर निर्भर करता है, इसलिए इसे किसी भी साधारण भौतिक पैरामीटर तक कम नहीं किया जा सकता है। यदि आपको ट्राम को स्थानांतरित करने की आवश्यकता है, तो इंजन को संभालना होगा गियर लोड, जिसे कार से ही घुमाने की जरूरत है, जिसे स्थानांतरित करने की आवश्यकता है, इसके अलावा, किसी को रोलिंग घर्षण बल के बारे में नहीं भूलना चाहिए जो वाहन के पहियों का अनुभव करता है। मामले में जब एक पेशेवर मांस की चक्की के काम का विवरण होता है, जो एक अतुल्यकालिक मोटर द्वारा संचालित होता है, तो गियरबॉक्स का प्रतिरोध, और मांस का वह टुकड़ा या यहां तक कि हड्डी जिसे जमीन की आवश्यकता होती है, यहां दूर हो जाती है . चूंकि स्टेटर और रोटर के बीच एक अंतर होता है, लोड के तहत रोटर कोणीय वेग के मामले में स्टेटर से पीछे रहता है। इसलिए, रोटर की गति मोटर शाफ्ट पर भार पर निर्भर करती है। तुल्यकालन के सिद्धांत का उल्लंघन किया जाता है, इसलिए डिवाइस का नाम ही: "एसिंक्रोनस मोटर"। एसिंक्रोनस मोटर में एम्बेडेड ऑपरेशन का सिद्धांत कई फायदे देता हैयह डिवाइस: इस डिजाइन के इलेक्ट्रिक मोटर्स में भी कमियां हैं। इनमें गर्मी के नुकसान शामिल हैं। वे वास्तव में ज़्यादा गरम हो सकता हैविशेष रूप से लोड के तहत। ऐसा करने के लिए, उनके मामलों को अक्सर काटने का निशानवाला बना दिया जाता है - ताकि वे आसपास के स्थान में बेहतर ढंग से गर्मी विकीर्ण कर सकें। इसके अलावा, एक अतुल्यकालिक उपकरण अक्सर रोटर को उड़ाने के लिए एक ही शाफ्ट पर बैठे एक पंखे से सुसज्जित होता है, क्योंकि आवास केवल स्टेटर से गर्मी को दूर कर सकता है, क्योंकि उनके बीच कोई हवा का अंतर नहीं है, जो रोटर के बारे में नहीं कहा जा सकता है। घूर्णी गति को स्थिर रखने में असमर्थता कुछ उपकरणों में अतुल्यकालिक मोटर को अनुपयुक्त बनाती है। स्टेटर में दो वाइंडिंग होती हैं जिनके बीच 90° का कोण होता है। कॉइल के दोनों समूह एक ही चरण से जुड़े हुए हैं, हालांकि, वाइंडिंग के बीच समान 90 ° शिफ्ट सुनिश्चित करने के लिए, उनमें से एक को कैपेसिटर के माध्यम से जोड़ा जाता है। इससे चुंबकीय क्षेत्र घूमने लगता है। इसी तरह के मोटर्स का उपयोग किया जाता है, उदाहरण के लिए, कॉफी ग्राइंडर या जूसर में। आप इसे परिवर्तन सुन सकते हैं प्रेरण मोटर ध्वनिइन उपकरणों में जब वे लोड के अधीन होते हैं। निष्क्रिय होने पर, रोटर की गति स्पष्ट रूप से अधिक होती है। संक्षेप में, यह कहना महत्वपूर्ण है कि अतुल्यकालिक इलेक्ट्रिक मोटर्स ने बहुत लोकप्रियता हासिल की है। बेशक, हमें कुछ कमियों के बारे में नहीं भूलना चाहिए। हालांकि, वे सभी बहुत सारे फायदों के कारण ओवरलैप करते हैं।
एसिंक्रोनस मोटर्स को मोटर्स कहा जाता है जिसमें रोटर की गति स्टेटर चुंबकीय क्षेत्र की गति से पीछे हो जाती है जब तीन-चरण की धारा अपनी वाइंडिंग से गुजरती है। जब तीन-चरण की मशीन के स्टेटर वाइंडिंग्स से तीन-चरण का प्रवाह गुजरता है, तो एक घूर्णन चुंबकीय क्षेत्र उत्पन्न होता है, जिसके प्रभाव में रोटर में एक विद्युत प्रवाह प्रेरित होता है। रोटर कंडक्टर में प्रेरित धाराओं के साथ स्टेटर के घूर्णन चुंबकीय क्षेत्र की बातचीत के परिणामस्वरूप, एक यांत्रिक बल उत्पन्न होता है जो वर्तमान-वाहक कंडक्टर पर कार्य करता है, जो एक टोक़ बनाता है जो रोटर को गति में सेट करता है। साथ ही, रोटर स्लिप के कारण एसिंक्रोनस मोटर की रोटर गति स्टेटर के घूर्णन चुंबकीय क्षेत्र की गति से हमेशा कम होती है, जो आधुनिक मोटर्स के लिए लगभग 2-5% है। इस प्रकार, एक प्रेरण मोटर डीसी मोटर्स के विपरीत, घूर्णन चुंबकीय प्रवाह (प्रेरक रूप से) द्वारा रोटर को आपूर्ति की गई ऊर्जा प्राप्त करती है, जिसमें तारों के माध्यम से ऊर्जा की आपूर्ति की जाती है। एसिंक्रोनस मोटर्स, सिंक्रोनस मोटर्स के विपरीत, प्रत्यावर्ती धारा से उत्साहित होती हैं। एक सिंक्रोनस मोटर की तरह एक एसिंक्रोनस मोटर में दो मुख्य भाग होते हैं: चरण वाइंडिंग वाला एक स्टेटर जिसके माध्यम से एक तीन-चरण प्रत्यावर्ती धारा गुजरती है, और एक रोटर, जिसकी धुरी बीयरिंग में रखी जाती है। रोटर शॉर्ट-सर्कुलेटेड और फेज (चित्र 170) हो सकता है। गिलहरी-पिंजरे रोटर (चित्र 170, में)यह एक सिलेंडर है, जिसकी परिधि के चारों ओर कंडक्टर अपनी धुरी के समानांतर स्थित होते हैं, रोटर के दोनों किनारों पर एक दूसरे के साथ छल्ले (गिलहरी के पहिये के रूप में) से बंद होते हैं। इस तरह के रोटर के साथ एक एसिंक्रोनस मोटर को गिलहरी-पिंजरे मोटर कहा जाता है। इसके नुकसान में शामिल हैं: स्टार्ट-अप के दौरान स्टेटर वाइंडिंग में कम स्टार्टिंग टॉर्क और हाई करंट। यदि वे शुरुआती टॉर्क को बढ़ाना चाहते हैं या शुरुआती करंट को कम करना चाहते हैं, तो वे एक फेज रोटर के साथ एसिंक्रोनस मोटर्स का उपयोग करते हैं (चित्र 170, जी)।इन मोटरों की रोटर पर वैसी ही वाइंडिंग होती है जैसी स्टेटर पर होती है। इस मामले में, वाइंडिंग के सिरे स्लिप रिंग से जुड़े होते हैं (चित्र 170, इ)मोटर शाफ्ट पर स्थित है। संपर्क के छल्ले ब्रश का उपयोग करके शुरुआती रिओस्तात से जुड़े होते हैं। इंजन शुरू करने के लिए, एक स्टेटर को आपूर्ति सर्किट में शामिल किया जाता है, जिसके बाद रोटर सर्किट से शुरुआती रिओस्तात का प्रतिरोध धीरे-धीरे हटा दिया जाता है। जब इंजन चालू किया जाता है, तो संपर्क के छल्ले स्टार्टर के संपर्कों से शॉर्ट-सर्किट हो जाते हैं, एक चरण रोटर के साथ एक अतुल्यकालिक इलेक्ट्रिक मोटर का अनुदैर्ध्य खंड अंजीर पर। 171 एक चरण रोटर के साथ एक प्रेरण मोटर के अनुदैर्ध्य खंड को दर्शाता है। यदि 6
स्टेटर वाइंडिंग 5 को खांचे में रखा गया है 4
स्टेटर स्टील। खांचे में 2
स्टील रोटर घुमावदार है 3
रोटर। एक गिलहरी-पिंजरे रोटर के साथ एक इलेक्ट्रिक मोटर का स्टार्ट-अप सर्किट के पूर्ण ऑपरेटिंग वोल्टेज (प्रत्यक्ष प्रारंभ विधि) पर स्टार्टर को सीधे स्विच करके किया जा सकता है। हालांकि, प्रेरित ई में तेज वृद्धि के कारण। डी.एस. और चालू चालू, प्रारंभिक क्षण में लक्ष्य में वोल्टेज कम हो जाता है, जो इस सर्किट द्वारा संचालित ड्राइव मोटर और अन्य उपभोक्ताओं के संचालन पर प्रतिकूल प्रभाव डालता है। एक बड़े स्टार्टिंग करंट के मामले में, इसे कम करने के लिए, गिलहरी-पिंजरे रोटर के साथ एसिंक्रोनस मोटर्स को आमतौर पर दो तरह से शुरू किया जाता है: स्टेटर वाइंडिंग्स को एक स्टार से एक त्रिकोण में शुरू करने के समय स्विच करके, यदि स्टेटर वाइंडिंग्स हैं इलेक्ट्रिक मोटर के सामान्य संचालन के दौरान, या स्टेटर सर्किट में एक स्टार्टिंग रिओस्टेट (या ऑटोट्रांसफॉर्मर) के माध्यम से इलेक्ट्रिक मोटर को चालू करके एक डेल्टा में जुड़ा हुआ है। संपर्ककर्ता को बंद करके मोटर को रोक दिया जाता है। मोटर बंद होने के बाद, स्टार्टिंग रिओस्टेट या ऑटोट्रांसफॉर्मर पूरी तरह से लगा हुआ है। अतुल्यकालिक मोटर्स के रोटेशन की गति को रोटर सर्किट (एक चरण रोटर के साथ इलेक्ट्रिक मोटर्स के लिए) में शामिल रिओस्टेट के प्रतिरोध को बदलकर और पोल जोड़े की संख्या को बदलने के लिए स्टेटर वाइंडिंग को बदलकर नियंत्रित किया जाता है (गिलहरी के साथ इलेक्ट्रिक मोटर्स के लिए) -केज रोटर)। एक पारंपरिक दो-पोल का उपयोग करके स्टेटर वाइंडिंग के तीन चरणों में से किसी दो को स्विच करके (सर्किट में स्टेटर वाइंडिंग क्लैंप को जोड़ने वाले तारों का उपयोग करके) घूर्णन स्टेटर चुंबकीय क्षेत्र की दिशा को बदलकर इंडक्शन मोटर्स के रोटेशन की दिशा को उलट दिया जाता है। बदलना। एसिंक्रोनस मोटर्स डिजाइन में सरल हैं, डीसी मोटर्स की तुलना में छोटे आयाम और वजन हैं, जिसके परिणामस्वरूप वे बहुत सस्ते हैं। इसके अलावा, वे संचालन में अधिक विश्वसनीय हैं, घूर्णन कलेक्टर और ब्रश उपकरण की अनुपस्थिति के कारण रखरखाव के दौरान कम ध्यान देने की आवश्यकता होती है; उनके पास उच्च दक्षता है, उनका नियंत्रण उपकरण डीसी मोटर्स की तुलना में बहुत सरल और सस्ता है। एसिंक्रोनस मोटर्स बिना स्पार्किंग के काम करती हैं, जो डीसी मशीनों में टूटी हुई स्विचिंग के साथ संभव है, इसलिए वे आग के मामले में सुरक्षित हैं। एसिंक्रोनस मोटर्स के सूचीबद्ध मुख्य लाभ समुद्री जहाजों पर प्रत्यावर्ती धारा के व्यापक परिचय की आधुनिक प्रवृत्ति की व्याख्या करते हैं। यह ध्यान दिया जाना चाहिए कि उद्योग में, अतुल्यकालिक मोटर्स ने अन्य प्रकार के इलेक्ट्रिक मोटर्स की तुलना में लंबे समय तक एक प्रमुख स्थान हासिल किया है। एसिंक्रोनस मोटर्स को एक किलोवाट के अंश से लेकर कई हजारों किलोवाट तक की शक्ति के साथ बनाया जाता है। समुद्री जहाज मुख्य रूप से गिलहरी-पिंजरे रोटर के साथ एसिंक्रोनस मोटर्स का उपयोग करते हैं, जो वाटरप्रूफ और स्प्लैश-प्रूफ संस्करणों में उपलब्ध हैं और 380/220 वी पर रेट किए गए हैं। टेस्ट प्रश्न: 1. डीसी जनरेटर का सिद्धांत क्या है? 2. डीसी इलेक्ट्रिक मशीन के मुख्य भाग क्या हैं और उनका उद्देश्य क्या है? 3. डीसी मशीनों को डिजाइन द्वारा कैसे विभाजित किया जाता है? 4. डीसी मोटर का कार्य सिद्धांत क्या है? 5. डीसी विद्युत मशीनों के रखरखाव के लिए बुनियादी नियम क्या हैं? 6. किन मशीनों को सिंक्रोनस कहा जाता है और उनके संचालन का सिद्धांत क्या है? 7. ट्रांसफार्मर किसके लिए हैं, उनके डिजाइन और संचालन के सिद्धांत क्या हैं? 8. किन मोटरों को अतुल्यकालिक कहा जाता है और उनके संचालन का सिद्धांत क्या है? 9. रोटर के डिजाइन के अनुसार एसिंक्रोनस मोटर्स को कैसे विभाजित किया जाता है? तीन-चरण बारी-बारी से चालू प्रणाली, जिसने एक घूर्णन चुंबकीय प्रवाह प्राप्त करने के लिए उपकरण बनाना संभव बना दिया, वर्तमान समय में सबसे आम इलेक्ट्रिक मोटर की उपस्थिति का कारण बना, जिसे एसिंक्रोनस कहा जाता है। यह नाम इस तथ्य के कारण है कि मशीन का घूर्णन भाग - रोटर - हमेशा गति से घूमता है जो चुंबकीय प्रवाह की गति के बराबर नहीं है, अर्थात। इसके साथ सिंक से बाहर। 127, 220, 380, 500, 600, 3000, 6000, 10,000 वी के वोल्टेज पर एक वाट से हजारों किलोवाट के अंशों से निर्मित, यह इलेक्ट्रिक मोटर डिजाइन में सरल, संचालन में विश्वसनीय और अन्य प्रकारों की तुलना में सस्ती है। इसका उपयोग उन सभी प्रकार के कार्यों में किया जाता है जहां घूर्णन की निरंतर गति बनाए रखने की आवश्यकता नहीं होती है, साथ ही रोजमर्रा की जिंदगी में, कम शक्ति के लिए एकल-चरण संस्करण में। अंजीर में दिखाए गए डिवाइस पर विचार करें। इसमें एक स्थायी चुंबक 1, एक कॉपर डिस्क 2, एक हैंडल 3 और बियरिंग्स 4 होते हैं। यदि आप चुंबक को हैंडल से घुमाते हैं, तो कॉपर डिस्क उसी दिशा में घूमने लगती है, लेकिन कम आवृत्ति पर। एक तांबे की डिस्क को असंख्य बंद घुमावों के रूप में देखा जा सकता है; जब चुंबक 1 घूमता है, तो इसकी चुंबकीय बल रेखाएं (m.s.l.) डिस्क के घुमावों को पार करती हैं, और घुमावों में एक इलेक्ट्रोमोटिव बल प्रेरित होता है निरूपित करें: मोटर्स में, स्टेटर वाइंडिंग के माध्यम से बहने वाली तीन-चरण धारा द्वारा एक घूर्णन चुंबकीय क्षेत्र बनाया जाता है, और रोटर वाइंडिंग एक डिस्क की भूमिका निभाता है। स्टेटर और रोटर का सक्रिय स्टील एक चुंबकीय सर्किट के रूप में कार्य करता है, जो चुंबकीय प्रवाह के प्रतिरोध को सैकड़ों गुना कम कर देता है। 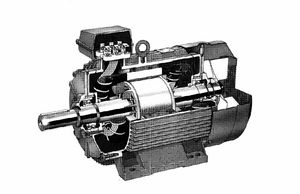
विभिन्न प्रकार के इंजन
तीन-चरण एक के विपरीत, एकल-चरण अतुल्यकालिक मोटर का उपयोग अक्सर घरेलू उपकरणों में किया जाता है - वैक्यूम क्लीनर, वाशिंग मशीन, पंखे, खाद्य प्रोसेसर, ब्लेंडर, आदि। उनका उपयोग टेप रिकॉर्डर और विनाइल डिस्क प्लेयर में भी किया जाता है। पर्सनल कंप्यूटर के हिस्से के रूप में भी, आप एक से अधिक एसिंक्रोनस मोटर पा सकते हैं। लेकिन हम इंजन के इस संस्करण के उपकरण पर थोड़ी देर बाद लौटेंगे।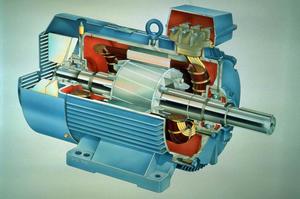
इंडक्शन मोटर्स के नुकसान
एकल चरण मोटर कनेक्शन
 हमारे घरेलू उपकरणों में, आप अक्सर एक ही अतुल्यकालिक उपकरण पा सकते हैं। लेकिन वह कैसे "समझता" है कि जब वह इसे शुरू करता है तो उसे किस दिशा में घूमना शुरू करना चाहिए, अगर उस पर केवल एक चरण और शून्य शुरू हो? ऐसी अतुल्यकालिक मोटर में, संचालन का सिद्धांत तीन-चरण एक के समान होता है - चुंबकीय क्षेत्र रोटेशन. ऐसा करने के लिए, प्रत्येक इंजन में एक और संपर्क होता है - शुरू करना।
हमारे घरेलू उपकरणों में, आप अक्सर एक ही अतुल्यकालिक उपकरण पा सकते हैं। लेकिन वह कैसे "समझता" है कि जब वह इसे शुरू करता है तो उसे किस दिशा में घूमना शुरू करना चाहिए, अगर उस पर केवल एक चरण और शून्य शुरू हो? ऐसी अतुल्यकालिक मोटर में, संचालन का सिद्धांत तीन-चरण एक के समान होता है - चुंबकीय क्षेत्र रोटेशन. ऐसा करने के लिए, प्रत्येक इंजन में एक और संपर्क होता है - शुरू करना।
एक प्रेरण मोटर के संचालन का सिद्धांत
n, - चुंबक के घूर्णन की आवृत्ति (तुल्यकालिक आवृत्ति), आरपीएम;
n2 - डिस्क रोटेशन आवृत्ति, आरपीएम; n - चुंबक और डिस्क के रोटेशन की आवृत्तियों के बीच का अंतर, आरपीएम।
डिस्क की घूर्णी गति चुंबक की घूर्णी गति से कम होती है, और इसलिए डिस्क एक गैर-तुल्यकालिक (अतुल्यकालिक) आवृत्ति पर घूमती है। चुंबक और डिस्क की आवृत्तियों के बीच का अंतर वह आवृत्ति है जिसके साथ M.S.L. डिस्क के घुमावों को पार करें। आवृत्ति अंतर और तुल्यकालिक आवृत्ति के अनुपात को पर्ची कहा जाता है। पर्ची को एक इकाई के अंशों में या प्रतिशत के रूप में व्यक्त किया जा सकता है:
स्टेटर पर लागू मेन वोल्टेज उल के प्रभाव में, एक करंट I, इसकी वाइंडिंग में प्रवाहित होता है। यह करंट एक घूर्णन चुंबकीय प्रवाह F बनाता है, जो स्टेटर और रोटर के माध्यम से बंद हो जाता है। प्रवाह दोनों वाइंडिंग में ईएमएफ बनाता है। ई (और ई 2, ट्रांसफॉर्मर की प्राथमिक और माध्यमिक घुमावों के रूप में। इस प्रकार, एक प्रेरण मोटर तीन चरण ट्रांसफार्मर के समान होता है जिसमें ईएमएफ एक घूर्णन चुंबकीय प्रवाह द्वारा बनाया जाता है। 
चावल। 2. cos f2 = 1 . पर एक अतुल्यकालिक मोटर का संचालन
प्रवाह को घड़ी की सुई की दिशा में घूमने दें। ईएमएफ के प्रभाव में। E2 रोटर वाइंडिंग करंट I2 में प्रवाहित होगा, जिसकी दिशा अंजीर में दिखाई गई है। 2. मान लें कि यह E2 के चरण में है। वर्तमान I2 और प्रवाह की परस्पर क्रिया विद्युत चुम्बकीय बल F बनाती है जो घूर्णन प्रवाह के बाद रोटर को घुमाने का कारण बनती है। इस प्रकार, एक अतुल्यकालिक मोटर एक घूर्णन माध्यमिक घुमावदार के साथ एक ट्रांसफार्मर है और इसलिए विद्युत शक्ति E2I2 cos f को यांत्रिक शक्ति में परिवर्तित करने में सक्षम है।
रोटर हमेशा घूर्णन चुंबकीय प्रवाह से पीछे रहता है, क्योंकि केवल इस मामले में ईएमएफ हो सकता है। ई 2, और इसलिए वर्तमान 12 और बल एफ। रोटर के घूर्णन की दिशा बदलने के लिए, आपको प्रवाह के घूर्णन की दिशा बदलनी होगी। ऐसा करने के लिए, किन्हीं दो तारों को स्वैप करें जो नेटवर्क से स्टेटर तक करंट की आपूर्ति करते हैं। इस मामले में, एबीसी चरणों का क्रम एसीबी या बीएसी में बदल जाता है, और प्रवाह विपरीत दिशा में घूमता है।
मोटर का रोटर एक अतुल्यकालिक आवृत्ति n2 के साथ घूमता है, और इसलिए मोटर को अतुल्यकालिक कहा जाता है। चुंबकीय प्रवाह के घूर्णन की आवृत्ति को तुल्यकालिक आवृत्ति n1 कहा जाता है। रोटेशन आवृत्ति ![]() रोटार
रोटार
सैद्धांतिक रूप से, पर्ची 1 से 0 या 100% से 0 तक भिन्न होती है, क्योंकि शुरू होने के पहले क्षण में एक स्थिर रोटर के साथ, n2 - 0; और अगर हम कल्पना करें कि रोटर प्रवाह के साथ समकालिक रूप से घूमता है, n2 = nx।
शाफ्ट पर जितना अधिक भार होगा, रोटर की गति उतनी ही कम होगी n2 और, परिणामस्वरूप, अधिक से अधिक एस, क्योंकि अधिक से अधिक ब्रेकिंग टॉर्क को टॉर्क द्वारा संतुलित किया जाना चाहिए; उत्तरार्द्ध केवल E2 और I2 में वृद्धि के साथ संभव है, और इसलिए एसिंक्रोनस मोटर्स के लिए रेटेड लोड एसएच पर एस पर्ची 1 से 7% तक है; निचली संख्या शक्तिशाली इंजनों को संदर्भित करती है।