Motori sincroni in corrente continua. Grande enciclopedia del petrolio e del gas. Motori passo-passo lineari sincroni
All'uno o all'altro apparecchio elettrico ha funzionato, richiede uno speciale meccanismo di azionamento. Uno di questi meccanismi è il motore passo-passo. In questo materiale imparerai di cosa si tratta, quale principio del suo funzionamento e in quali categorie è suddiviso.
Il motore passo-passo può essere unipolare o bipolare. È un motore DC elettrico e brushless in grado di dividere una rivoluzione completa in più passaggi identici. Include i seguenti dettagli:
Generatori di corrente ideali Un generatore di corrente può essere rappresentato da questo simbolo, dove la direzione della freccia indica la direzione della corrente: un generatore ideale. Componenti in cui certo forze elettriche sono chiamati generatori elettrici. Sono sede dell'interazione tra fenomeni elettrici e fenomeni di diversa natura, che realizzano la generazione di elettricità per conversione da altre forme di energia. Sono bipolari attivi, hanno terminali che consentono il collegamento ad altri componenti elettrici e rientrano in due categorie: corrente-corrente.

Il motore passo-passo viene utilizzato principalmente per i seguenti scopi:
- lavoro della fresatrice;
- lavoro con la rettificatrice;
- garantisce il funzionamento di vari elettrodomestici;
- lavoro di mezzi meccanici industriali;
- fornisce il trasporto.
Generatori di tensione ideali Un generatore di tensione può essere indicato da uno dei seguenti simboli. Rappresentazione del generatore di corrente. Quali tipi di generatori esistono? Di grandi dimensioni centrali eoliche costituito da centinaia di singole turbine eoliche collegate a una rete elettrica. L'eolico offshore è più stabile, fornisce più energia e ha un impatto visivo minore, ma costa di costruzione e Manutenzione significativamente più alto. Piccoli parchi eolici onshore forniscono elettricità in luoghi isolati.
Principio di guida
 Il principio di funzionamento di questa unità è il seguente. Quando viene applicata tensione ai terminali, le spazzole sul motore passo-passo stesso iniziano a muoversi costantemente. motore mossa inattiva ha una proprietà unica: it converte gli impulsi in entrata, avente un orientamento prevalentemente rettangolare, ad una posizione predeterminata dell'albero di trasmissione attaccato.
Il principio di funzionamento di questa unità è il seguente. Quando viene applicata tensione ai terminali, le spazzole sul motore passo-passo stesso iniziano a muoversi costantemente. motore mossa inattiva ha una proprietà unica: it converte gli impulsi in entrata, avente un orientamento prevalentemente rettangolare, ad una posizione predeterminata dell'albero di trasmissione attaccato.
Le compagnie elettriche acquistano sempre più elettricità in eccedenza prodotta da piccole turbine eoliche domestiche. L'energia eolica è un'energia alternativa a combustibili fossili ricca, rinnovabile e supportata da un'economia verde, diffusa, pulita, non emette gas serra durante il funzionamento e richiede appezzamento di terreno. L'ambiente è generalmente meno problematico di ambiente. Lame del vento, questi buoni giganti sono sempre in movimento, incapaci di incantare e curiosi.
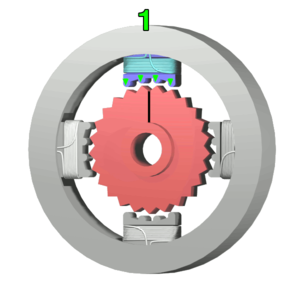
Ciascuno degli impulsi in arrivo è in grado di muovere l'albero ad una certa angolazione. I dispositivi dotati di tale riduttore hanno la massima efficienza a condizione che vi siano diversi elettromagneti a ingranaggi che si trovano attorno a un pezzo centrale di ferro a forma di ingranaggio. Il circuito di controllo esterno eccita l'elettromagnete. Se è necessario ruotare l'albero motore, l'elettromagnete a cui viene applicata l'energia attira i denti della ruota. Quando sono allineati con l'elettromagnete, sono sfalsati rispetto alla successiva parte magnetica del motore.
Tipi di motori passo-passo
E così, per dubitare, spiegheremo come funzionano. Innanzitutto, iniziamo distinguendo due tipi di aerogeneratori: ad asse verticale e ad asse orizzontale. Le turbine comunemente viste nei moderni parchi eolici sono costituite da una torre e tre pale ad asse orizzontale, da cui prendono il nome. Meno comuni sono le turbine ad asse verticale, meno efficienti delle prime, ma in grado di dirigere il vento in tutte le direzioni, e anche con vento leggero possono girare velocemente.
Motori passo-passo lineari sincroni
Sono costituiti da una torre centrale attorno alla quale sono le lame verticali. motore elettrico corrente alternataè un motore elettrico che può funzionare a corrente alternata. Con solo avvolgimento statorico Questi motori sono uno degli alimentatori più utilizzati per questa tipologia e si suddividono in diversi aspetti: Numero di fasi Motore trifase.
Il primo elettromagnete si spegne, quindi si accende il secondo, dopodiché l'ingranaggio inizia a ruotare, allineandosi con la ruota precedente. Quindi questa azione viene ripetuta. numero di volte richiesto. Ognuna di queste rotazioni è chiamata passo costante, mentre la velocità di rotazione di un motore passo-passo può essere calcolata contando il numero di passi necessari per completare il suo giro.
Motore a induzione trifase Magnete statore in un motore asincrono trifase Un motore trifase è un tipo di motore elettrico che richiede un sistema di correnti trifase per essere avviato, sfasato nel tempo e nello spazio con un angolo di 120°. Un motore asincrono è un motore a corrente alternata, velocità angolare il suo rotore è inferiore alla velocità di rotazione del campo magnetico generato dagli avvolgimenti dello statore, di cui è asincrono. Un motore a induzione è anche chiamato motore a induzione a causa del suo principio di funzionamento come descritto di seguito.
Per controllare il funzionamento del motore passo-passo, viene utilizzato un driver speciale. Ciò è necessario nei casi in cui si sta configurando un azionamento per azionare una macchina o utilizzarlo per avviare un generatore eolico.
Tipi di motori passo-passo
I motori passo-passo sono suddivisi nei seguenti tipi:
Caratteristiche del collegamento di un motore passo-passo
Un motore a induzione può essere utilizzato come alternatore con o senza l'utilizzo di condensatori, a seconda che sia collegato o meno alla rete. Viene utilizzato per piccole potenze in situazioni in cui si preferisce la semplicità di utilizzo di un motore sincrono anche a scapito delle prestazioni.
Un motore monofase è un tipo di motore elettrico che richiede l'uso di una linea elettrica con una fase elettrica e un filo neutro, questi motori possono avere diverse applicazioni e design, solitamente tenendo conto delle caratteristiche non elettriche Motori bifase vengono utilizzati per azionare questi motori, dove ricevono una seconda fase utilizzando un condensatore.
- con un magnete permanente;
- trasmissione ibrida sincrona;
- motore variabile.
Tutti loro sono in qualche modo diversi l'uno dall'altro, compresi i principi del loro lavoro.
Ad esempio, gli azionamenti a magneti permanenti sono dotati di una speciale parte magnetica nel rotore. Tale i motori funzionano secondo il principio di attrazione o repulsione statore e rotore di un motore basato su un elettromagnete.
Il motore sincrono è un motore monofase meno utilizzato date diverse applicazioni caratterizzato da un campo magnetico indotto da un campo magnetico sincronizzato con il campo magnetico dello statore, che poi ruota alla stessa frequenza. Quando la corrente scorre attraverso gli avvolgimenti, si crea un campo magnetico attorno al rotore. La parte sinistra del rotore viene gettata via dal magnete sinistro e attirata da quella destra. Allo stesso modo, in basso a destra. La coppia genera rotazione. Quando l'armatura si allinea orizzontalmente, l'interruttore inverte la direzione della corrente attraverso gli avvolgimenti, modificando anche il campo magnetico.
Il motore variabile ha un rotore in ferro convenzionale e il suo funzionamento è basato sul principio della fondamentalità. Quando il livello minimo di repulsione è consentito con il minimo spazio, mentre le punte del rotore hanno un'attrazione sui poli dello statore.
Ma un'unità ibrida può combinare entrambi i principi di funzionamento, è considerato il modello più costoso di motori passo-passo.
Un motore lineare è un motore elettrico in cui il rotore e lo statore, invece di essere circolari, "ruotano" e invece di creare coppia creano una forza lineare. Esistono molte soluzioni progettuali per i motori lineari, che possono essere divisi in due categorie: bassa accelerazione e alta accelerazione.
Specifiche chiave del motore
Presentazione del motore elettrico. I veicoli elettrici possono essere diversi ea seconda delle esigenze o caratteristiche del progetto su 1, 2, 3, 4 o più ruote. Quali sono i tipi di veicoli più comuni? Motocicletta elettrica, moto zero Uno scooter elettrico o motocicletta elettrica è un veicolo a due o tre ruote che utilizza Motore elettrico per il movimento.
Motori passo passo bifase
 Il motore bifase è molto semplice, può essere installato da una persona senza particolare esperienza. Indipendentemente dal fatto che tu l'abbia assemblato da solo o acquistato pronto all'uso, ha due tipi di avvolgimenti della bobina:
Il motore bifase è molto semplice, può essere installato da una persona senza particolare esperienza. Indipendentemente dal fatto che tu l'abbia assemblato da solo o acquistato pronto all'uso, ha due tipi di avvolgimenti della bobina:
L'articolo si occupa della sovracorrente casuale e del sovraccarico di coppia a breve termine nei motori asincroni polifase, motori corrente continua e motori sincroni polifase. La capacità di sovraccarico di corrente delle macchine rotative è indicata per abbinare queste macchine con dispositivi di controllo e protezione. L'effetto termico nelle macchine avvolgitrici varia approssimativamente in funzione del tempo e della seconda corrente di alimentazione. La corrente che supera la corrente nominale aumenterà la temperatura. Salvo diversa indicazione, si può presumere che la macchina funzionerà con sovraccarichi di corrente durante la sua vita solo per pochi brevi periodi di tempo.
- unipolare;
- bipolare.
Se un motore passo-passo ha un avvolgimento con una presa magnetica centrale che influenza ogni fase, allora è un azionamento unipolare. Ogni sezione dell'avvolgimento deve essere attivata per garantire la corretta direzione del campo magnetico. In questo drive, il polo magnetico è quindi in grado di funzionare senza la necessità di ulteriori commutazioni, quindi le direzioni di corrente e la commutazione del circuito sono rese molto semplici, utilizzando un transistor per ogni avvolgimento. Vengono presi in considerazione i seguenti cambiamenti di fase:
Se una macchina AC deve essere utilizzata come generatore e non come motore, il sovraccarico deve essere una questione di accordo. Motori I motori polifase con potenza nominale fino a 315 kW e tensione nominale fino a 1 kV devono sopportare: una corrente pari a 1,5 volte la corrente nominale per almeno 2 minuti. Per motori polifase con potenza nominale superiore a 315 kW e per tutti motori monofase non c'è sovracorrente accidentale.
Sovraccarico torsionale momentaneo dei motori
L'interruttore deve resistere a 1,5 volte la corrente nominale per 60 secondi in una combinazione appropriata delle seguenti condizioni. Polifase motori asincroni e motori CC I motori, indipendentemente dal tipo di carico e dal design, devono resistere per 15 secondi senza arresti o variazioni improvvise del sovraccarico di coppia, il 60% della loro coppia nominale, con tensione e frequenza mantenute con valori nominali. Per i motori DC, la coppia deve essere espressa in termini di sovracorrente.
- tre fili per fase;
- sei per uscita.
Il microcontrollore del motore di azionamento può essere utilizzato per attivare il transistor in una sequenza particolare.
E gli avvolgimenti possono essere collegati anche toccando i fili di collegamento insieme ai magneti permanenti dell'azionamento. Quando si collegano i terminali della bobina, sarà difficile ruotare l'albero. Resistenza tra l'estremità della bobina e il filo comune pari alla metà della resistenza estremità della bobina e del filo. Sembra così perché filo comune Esso ha grande lunghezza rispetto al mezzo pezzo utilizzato per collegare le bobine.
I motori destinati ad applicazioni speciali che richiedono una coppia elevata devono essere abbinati. Nel caso di motori asincroni in cortocircuito progettati specificatamente per ottenere una corrente di spunto inferiore a 4,5 volte superiore corrente nominale, il sovraccarico di coppia può essere inferiore al 60% del valore indicato nel primo comma, ma non inferiore al 50%.
Nel caso di tipi particolari di motori asincroni con caratteristiche di avviamento particolari, come motori a velocità variabile o motori asincroni alimentati da convertitori statici, è necessario concordare il valore di sovracoppia. Se non diversamente specificato, un motore sincrono polifase deve sopportare, indipendentemente dal carico, per 15 secondi la coppia di sovraccarico descritta di seguito senza perdita di sincronizzazione mantenendo l'eccitazione ad un valore corrispondente al carico nominale.
I motori passo-passo bipolari hanno un avvolgimento di fase, in cui la corrente viene fornita in modo inverso utilizzando un polo magnetico. Il sistema di controllo in questo caso sarà complesso utilizzando un ponte di collegamento. Ci sono due fili per fase, ma non sono comuni. Mescolando il segnale del motore passo-passo alle alte frequenze, è possibile ridurre l'effetto di attrito del sistema.
Inoltre, un altro tipo di motore passo-passo è trifase, ma la sua portata è troppo ristretta:
- durante il funzionamento di fresatrici CNC;
- su alcuni veicoli in cui viene utilizzata una valvola a farfalla;
- su drive e stampanti di alcune marche.
Motori passo-passo reattivi: caratteristiche e principio di funzionamento
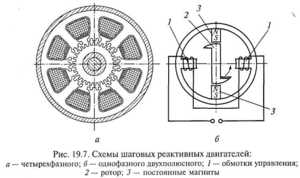 Vale la pena notare che le unità stepper attive presentano un grosso inconveniente: questo è un grande passo, che raggiunge diverse decine di gradi. Al contrario, reattivo i motori passo-passo sono in grado di ridurre la frequenza del rotore, per cui il gradino diventa angolare di meno di un grado.
Vale la pena notare che le unità stepper attive presentano un grosso inconveniente: questo è un grande passo, che raggiunge diverse decine di gradi. Al contrario, reattivo i motori passo-passo sono in grado di ridurre la frequenza del rotore, per cui il gradino diventa angolare di meno di un grado.
La caratteristica principale del jet drive è che i denti sono posizionati sui poli dello statore. Il momento di sincronizzazione in esso è fornito dalla differenza di resistenza magnetica lungo l'asse trasversale e longitudinale dell'azionamento.
Il motore passo-passo reattivo ha uno svantaggio fondamentale: esso nessuna coppia di sincronizzazione se gli avvolgimenti dello statore sono diseccitati.
È possibile aumentare il grado di riduzione del motore, indipendentemente da quale, attivo o reattivo, utilizzando strutture multipacchetto, quando i denti dello statore sono spostati l'uno verso l'altro di una parte della divisione, e il rotore di ogni pacco lo fa non si muovono e gli assi dei loro poli sono gli stessi. Simile il design è molto complesso in termini di creazione e non è economico nella forma finita, richiederà anche un cambio complesso.
Ad oggi, in vendita puoi trovare un numero enorme di vari modelli di motori, che differiscono per parametri come:
- numero di fasi;
- tipo di posizionamento dell'avvolgimento;
- modalità di fissaggio del rotore, ecc.
Nei motori passo-passo a induttori, la coppia viene creata dall'interazione di un campo magnetico, creato dagli avvolgimenti dello statore, e un magnete permanente situato nella parte dentata della fessura.
La coppia di sincronizzazione in un motore a induttore è essa stessa reattiva, determinando un avvolgimento dello statore, mentre il magnete permanente è in grado di produrre una coppia di fissaggio, mantenendo così il rotore in posizione. posizione desiderata senza corrente.
A differenza di un motore passo-passo reattivo, uno a induttore, con un passo simile, ha una coppia di sincronizzazione maggiore, oltre a una maggiore specifiche.
Motori passo-passo lineari sincroni
 Per automatizzare alcuni processi produttivi in un'impresa, a volte diventa necessario spostare gli oggetti su un piano. Per farlo devi usare un convertitore speciale movimento rotatorio in traslatorio, che si ottiene applicando la cinematica.
Per automatizzare alcuni processi produttivi in un'impresa, a volte diventa necessario spostare gli oggetti su un piano. Per farlo devi usare un convertitore speciale movimento rotatorio in traslatorio, che si ottiene applicando la cinematica.
Con i motori passo-passo lineari, puoi convertire direttamente il comando a impulsi movimento lineare, che semplificherà notevolmente lo schema cinematico di vari azionamenti elettrici.
Lo statore in questo azionamento si presenta sotto forma di una piastra magneticamente morbida e i fili sono magnetizzati dal funzionamento di un magnete permanente.
Le divisioni dei denti nello statore e nella parte mobile sono le stesse, mentre possono essere spostati di mezza divisione all'interno di un filo del rotore. Il flusso di polarizzazione e la sua resistenza magnetica, in questo caso, non dipendono da dove si trova la parte mobile del motore.
Per spostare un oggetto su un piano secondo due coordinate, vengono utilizzati motori di tipo a due coordinate.
Anche nei motori lineari viene utilizzata la sospensione pneumatica magnetica. A causa della forza di attrazione magnetica, il rotore viene attratto dallo statore. Ulteriore l'aria viene soffiata sotto il rotore attraverso gli ugelli in una forma compressa, a seguito della quale appare una forza che respinge il rotore dallo statore. Quindi tra di loro c'è un cuscino d'aria e il rotore pende sopra lo statore con un gioco minimo. Ciò fornisce una resistenza minima al movimento del rotore e un posizionamento di alta precisione.
 L'azionamento è in grado di funzionare stabilmente a condizione che non vi siano perdite di gradini durante l'elaborazione dell'angolo quando vengono applicati treni di impulsi agli avvolgimenti di comando. Durante ogni passaggio il rotore ha un equilibrio sicuro rispetto al vettore di induzione magnetica relativo a campo magnetico statore.
L'azionamento è in grado di funzionare stabilmente a condizione che non vi siano perdite di gradini durante l'elaborazione dell'angolo quando vengono applicati treni di impulsi agli avvolgimenti di comando. Durante ogni passaggio il rotore ha un equilibrio sicuro rispetto al vettore di induzione magnetica relativo a campo magnetico statore.
La modalità di elaborazione di ogni passaggio deve corrispondere al numero di impulsi di controllo che vengono applicati agli avvolgimenti di azionamento e, allo stesso tempo, fino all'arrivo dell'impulso successivo, deve elaborare l'angolo di rotazione ad esso assegnato. All'inizio di ogni passo, la velocità angolare del motore deve essere zero.
Sono ammesse oscillazioni dell'albero cardanico rispetto al valore stabilito. Sono causati dalla presenza di energia cinetica, che viene accumulata dall'albero motore durante l'esecuzione della curva. In questo caso, l'energia che può essere convertita in perdite:
- magnetico;
- meccanico;
- elettrico.
Maggiore è il loro valore, più veloce sarà il processo di transizione dell'elaborazione di un passo alla fine dell'unità.
All'avvio, il rotore può rimanere indietro rispetto al flusso dello statore di un gradino o anche di più, determinando una discrepanza tra il numero di gradini del rotore e il flusso dello statore.
Le caratteristiche principali di un motore passo-passo sono:
- caratteristica meccanica finale;
- Raccogliere.
La caratteristica limite è la dipendenza della massima coppia di sincronizzazione possibile dalle frequenze degli impulsi di comando.
E il pickup è la frequenza di questi impulsi, che elimina la possibilità di perdita o aggiunta di un passaggio durante l'elaborazione. Raccogliere considerato un indicatore chiave modalità di transizione nel motore. È in grado di crescere insieme alla coppia di sincronizzazione, alla riduzione del passo, al momento d'inerzia delle particelle spostate linearmente o ruotate, nonché al momento di resistenza statico.
Caratteristiche del collegamento di un motore passo-passo
 È possibile collegare un motore di tipo passo-passo secondo l'uno o l'altro schema, che dipende dal numero di fili e dai metodi di avvio.
È possibile collegare un motore di tipo passo-passo secondo l'uno o l'altro schema, che dipende dal numero di fili e dai metodi di avvio.
I motori possono avere da quattro a otto fili. Se ce ne sono solo quattro, l'uso del motore è possibile solo con un dispositivo bipolare. Ogni avvolgimento di fase, di cui ce ne sono solo due, è dotato di due fili. Le coppie cablate devono essere determinate utilizzando un misuratore, quindi il driver viene collegato passo dopo passo.
Il motore, dotato di sei fili, prevede due fili per ogni avvolgimento e una presa centrale, sempre per ciascuno di essi. Può essere collegato a dispositivi sia unipolari che bipolari. Per trasmissione divisa è necessario utilizzare un dispositivo speciale. per misurare. Ad un dispositivo unipolare, l'azionamento può essere collegato utilizzando tutti e sei i fili, e ad un dispositivo unipolare saranno sufficienti un'estremità e una presa centrale per ciascun avvolgimento.
Il motore a cinque fili praticamente non differisce dal precedente, tuttavia i suoi terminali centrali sono collegati dall'interno come un cavo solido e hanno un'uscita su uno dei fili. Non separare gli avvolgimenti l'uno dall'altro, altrimenti puoi romperli. Meglio invece individuare il centro del filo e collegarlo ad altri conduttori, questa sarà la soluzione di connessione più efficiente. Successivamente, puoi collegare il dispositivo stesso e verificarne il funzionamento.
Specifiche chiave del motore
 L'avvolgimento primario a corrente continua crea Tensione nominale. E la velocità iniziale della coppia motrice varia con la corrente. Il tempo per ridurre la coppia lineare a velocità più elevate dipende da cosa è il circuito del motore e dall'induttanza dei suoi avvolgimenti. Alcune marche di motori con protezione IP65 sono in grado di lavorare nelle condizioni più difficili.
L'avvolgimento primario a corrente continua crea Tensione nominale. E la velocità iniziale della coppia motrice varia con la corrente. Il tempo per ridurre la coppia lineare a velocità più elevate dipende da cosa è il circuito del motore e dall'induttanza dei suoi avvolgimenti. Alcune marche di motori con protezione IP65 sono in grado di lavorare nelle condizioni più difficili.
Se vuoi scegliere un modello di motore passo-passo già pronto di produzione nazionale, prestare attenzione alle principali caratteristiche tecniche i modelli più famosi:
- ShD-1 - il grado del passo è 15, 4 fasi, la coppia è 40 Nt;
- DSh-0.04A - gradino 22.5, 4 fasi, coppia 100 Nt;
- DSHI 200 - gradino 1,8, 4 fasi, coppia 0,25 Nt;
- DSh-6 - grado gradino - 18, 4 fasi, coppia 2300 Nt.
Anche popolari tra gli acquirenti sono modelli come:
- DShR-40 a quattro fasi;
- SM-200-0,22;
- Ricerca e sviluppo Purelogic con encoder;
- NEMA 23;
- STH-39D1112;
- SP-57;
- Sanyo DenkiSM28.
Quando si seleziona motore desiderato, è necessario calcolare i parametri di potenza, tensione e coppia.
Uno dei problemi con il funzionamento di un motore passo-passo è il controllo dei dispositivi in assenza di un controller. Per affrontare questo, è necessario prendi uno speciale blocco di connessione logica, che aiuta a controllare il motore in assenza di un appropriato microcircuito. Tuttavia, è meglio controllare il funzionamento dei motori passo-passo utilizzando un controller speciale.
Il costo medio di un azionamento passo-passo nelle grandi città della Russia e dell'Ucraina
Il costo di questo dispositivo dipende direttamente da indicatori come:

Il costo medio di un motore passo-passo unipolare è:
- Mosca - 3000 USD;
- San Pietroburgo - 3500 USD;
- Kiev - 3500 USD;
- Kharkiv - 4000 c.u.
Quindi, abbiamo detto cos'è un motore passo-passo, su quale principio funziona, in quali categorie è suddiviso e da quali proprietà differisce. Ci auguriamo che questo ti renda più facile scegliere quando è necessario acquistare questo dispositivo.
Pagina 3
Le dimensioni e le caratteristiche principali delle sale da trazione VNIIPTmash sono riportate nella tabella. 6.2. Sostituendo il motore quadripolare con un motore bipolare flangiato con freno elettromagnetico incorporato è possibile aumentare di 2 volte la velocità del carrello, e quando si utilizzano motori elettrici a numero di poli variabile, due stadi di velocità di funzionamento può essere ottenuto.
| Lo schema del cluster sotterraneo. |
Nelle installazioni di elettropompe sommerse a vite vengono utilizzati motori elettrici a quattro poli con una velocità dell'albero di 1500 giri/min (sincroni) e nelle installazioni di elettropompe sommergibili centrifughe vengono utilizzati motori elettrici a due poli con una velocità dell'albero di 3000 giri/min.
Tutti questi compressori sono monocilindrici, hanno un diametro del cilindro di 36 mm, un codice del pistone di 19 mm, un volume descritto dal pistone, 0 87 dm3 - s. Vengono utilizzati motori elettrici bipolari trifase AVK2 - 0 7; AEC2 - 0,7 e AEC2 - 1 (rispettivamente), le cui caratteristiche sono riportate in Tabella. V-14.
L'EPU ha un meccanismo per il controllo automatico del pickup. EPU funziona da un motore elettrico asincrono monofase bipolare Con avviamento a condensatore Velocità rotore 2800 giri/min. Per ridurre il livello di fondo, il motore elettrico è racchiuso in uno schermo in permalloy.
Se, ad esempio, ci sono 12 cave nello statore di un motore elettrico a due poli, allora ci sono sei cave per polo, e queste sei cave devono accogliere i lati delle bobine di tutte e tre le fasi che creano questo polo. Pertanto, nella progettazione e realizzazione dei circuiti di avvolgimento, il numero di slot per polo e fase è un valore caratteristico e determinante.
Motori elettrici ventilati protetti e chiusi con gli stessi valori potenza e velocità di rotazione hanno le stesse dimensioni di installazione. L'eccezione a questo regola generale sono motori elettrici bipolari in esecuzione chiusa e ventilata, in cui la potenza è di un gradino inferiore a quella dei motori elettrici in esecuzione protetta. Allo stesso tempo, per i motori elettrici bipolari A e AO di dimensioni 6, 7, 8 e 9 alla potenza di 14, 28, 55 e 100 kW, le dimensioni di installazione sono le stesse.
Iniziamo il calcolo con i motori in corrente continua, poiché il loro calcolo è più semplice e chiaro rispetto ai motori in corrente alternata. Ecco una spiegazione dettagliata di tutti i valori calcolati, che si troveranno poi nei motori AC. Il calcolo è dato per motori elettrici bipolari con eccitazione in serie.
Vengono utilizzate anche elettropompe a vite, che esternamente non differiscono dagli ESP convenzionali. In questo caso, l'olio dai pozzi alla superficie non viene fornito da una pompa centrifuga, ma da una pompa a vite (monovite). In tali pompe vengono utilizzati motori elettrici sincroni a quattro poli con una velocità dell'albero di 1500 giri / min e negli ESP convenzionali vengono utilizzati motori elettrici a due poli con una velocità dell'albero di 3000 giri / min.
Le spazzole devono essere premute contro la superficie del collettore. A questo servono i portaspazzole. Sopra la spazzola è posizionata una molla a spirale in filo sottile. Sulla sommità del tubo è avvitato un tappo 5 che impedisce alla spazzola e alla molla di cadere dal tubo. Il portaspazzole viene premuto nella parete dell'alloggiamento del motore. In un motore a due poli devono essere presenti due portaspazzole con spazzole. Devono essere installati in modo che le spazzole siano tra i poli del sistema magnetico del motore elettrico. I portaspazzole devono essere isolati tra loro e dalla carcassa del motore. Per scaricare la corrente è necessario avvitare o saldare al portaspazzole un conduttore isolato.