交流からのDCモーター。 DCモーターは
詳細に興味がある場合は、エンジンの動作原理 直流多くのサイトで、さらには数式で詳細に説明されています。 これについてだけでなく、あまり知られていないいくつかの機能についても話すことにしました。
DCマシンについて一言
それは変数の前に取得され、それが現れた瞬間から、この獣が何に使用できるかについての実験が始まりました。 電流、磁場、回転の関係はかなり早く確立されました。 それはファラデーがワイヤーで巻線に磁石を入れて、電流の出現を発見したという事実から始まりました。 その後、最初に磁石をコイルの中に入れてから電流を流すと、磁石が押し出されることを発見しました。 または、逆に、中に描かれます。 これがDCマシンの動作原理です- 相互作用の使用 磁場と電気。 そして、磁石を「突く」と電気が入り、電気を供給すると磁石を「押し出す」ということに注目しましょう。 つまり、私たちが検討しているデバイスと動作原理であるDCマシンは、まさにマシンです。 つまり、エンジンは発電機でもあります。言い換えれば、これらは機械的エネルギーを電気的エネルギー(電流)に可逆的に変換するための機械です。 磁石には、電気のプラスとマイナスの2つの極があります。 この場合の磁石と電流の相互作用は複雑な法則に従いますが、回転に関心がある場合(そして技術では漸進的な戻り運動が必要になることはめったにありません)、磁石の極性に対して時計回りに一方向しか取得できませんと電流の方向。 それがよく知られている「ギムレットのルール」、つまり「左手のルール」です。 2本のワイヤーを交換することで巻線電流の極性を簡単に変えることができますが、磁石の極を変えることはできず、モーターを燃やすだけです。 参考までに、「右手の法則」を見ることができます。 電気工学にもそういうことがありますが、それはDC機にも当てはまりますが、エネルギー生成の観点からです。 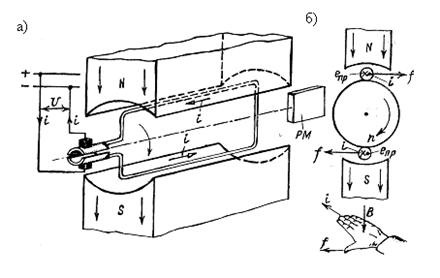
シャフト自体の回転は次のように発生します。 磁場の中には、コイルが載っているシャフトを備えたローターがあります。 電流を流すと磁場が発生します。 磁石は異なる極で引き付けられ、同じ極で反発します。 外部磁石は、作動したローター電磁石を「反発」させ、電流が流れている間は常に「反発」させ、シャフトの回転を引き起こします。
これはDCモーターの動作原理であり、他のすべては詳細と技術的な詳細です。
DCモーター装置の特徴
もちろん、理論的には、DCマシンの動作原理は明らかですが、好奇心旺盛な読者はすぐに尋ねます-双極磁石の内部にある場合、ローターはどのように回転し始めますか? このような質問は避けられないものであり、それに答えるには、DCモーターの設計を慎重に検討する必要があります。 ちなみに、エンジンの動作を理解するのに役立つ知識があります 交流電流.
DPTの初期の作成者が直面した問題のリストから始めましょう。
- 可用性 2つのデッドスポット、その独立した起動は不可能です。 (磁石の同じ2つの極)。
- 低電流での磁気反発力が弱すぎる。 または、始動を妨げる強い回転抵抗。
- ローターは1回転後に停止します。 回転ではなく、前後に揺れます。これは、円の半分を通過した後、ローターの「磁石」が反発せずに引き付けられたためです。つまり、回転を加速せず、減速しました。
リバーシブル電気機械の原理の実装など、材料といくつかの小さなものがありました。
最初に勝ったのは、2つではなく3つ以上の磁石を使用した「デッドスポット」でした。 ローターの3つの歯はデッドスポットを排除します。1つは常に磁場の中にあり、エンジンはローターの任意の位置から始動できます。
DC機の動作原理を適用することで、加速と減速の問題を克服することができました- 電流を維持しながらプラスとマイナスを簡単に切り替えることができます。 言い換えれば、始動後の回転の前半で、ローターは電流の極性で始動します:上部の点でプラス、下部でマイナス。 上の点が下の位置を占めるとすぐに、点の極性がマイナス-プラスに変わり、「反発-加速」が回転の終わりまで続き、その後、サイクルが繰り返され、ブレーキがかけられなくなります。 そのようなメカニズムはと呼ばれます コレクタ。 固定接点から回転シャフトへの電流の伝達を提供する電気モーターのまさにブラシ。 そして、なんというショーでしょう! ローターの符号を1回転あたり2回変更します。 エンジンの回転数が2000rpmの場合、コレクターがどれだけ機能する必要があるかを計算します。
コレクターは、回転を電流に逆変換できるため、DCモーターの設計を検討する際に最も難しい部分です。 主な消耗品はブラシです。 購入した 新しいデバイス電気モーターを使用する場合は、スペアがあることを確認してください。 怠惰にならないでください。デバイスが新しい間は、さらに2、3セット購入してください。
コレクターの複雑さにより、コレクターの状態とスパークの正しい動作を視覚的に判断できます。 火花(およびコレクターは接点スイッチにすぎない)がリングを形成するとき、それは本当に悪いことです-「オールラウンドファイア」。 これは、エンジンが長持ちしないことを意味します。 火花との戦いはさまざまな成功を収めて進んでいますが、それを完全に打ち負かすことはできませんが、DPTの耐用年数を延ばすことはできました。
起動時に弱い電流を忘れて、すぐに3番目の問題を検討したように思われる場合は、間違いです。 起動の問題は非常に複雑であることが判明したため、個別に検討します。
DCモーターの始動電流
したがって、DCモーターの動作原理は明確であり、自己始動を提供し、逆磁極のセクターブレーキを排除しました。それはオンのままです。 しかし、ここに問題があります。 すべてが順調ですが、ローターはまだ回転しません。 事実、エンジンを完成させている間、ローターは重くなり、フライホイールなどがあり、磁石がローターを「回転」させるには電流が十分ではありません。 「なんてこった!」 (c)好奇心旺盛な実験者は叫び、単に電流を増やします。 そして、あなたが知っている、エンジンは本当に回転します。 いくつかで もしも :
- 巻線が燃え尽きない場合(コイル内のワイヤー);
- 現在のサージに耐える場合;
- このような始動時にスイッチングセクターがコレクターに溶着しない場合など。
したがって、単純な増加 始動電流すぐに間違った決定と見なされました。 ちなみに、ACモーターに対するDCモーターの主な利点についてはまだ触れていません-これは ダイレクトトルクトランスミッション、最初から。 簡単に言えば、回転が始まった瞬間から、DCTシャフトは何でも「回転」させ、交流エンジンの出力を超える大きな抵抗を克服することができます。
この利点は、DPTのアキレス腱になっています。 DCマシンの動作原理そのものでは、片側の始動電流を任意に変更することはできないようでした。 一方、起動に大電流を流し、起動後に自動化が必要になった後、電流を減らしようとします。 当初、特に高出力DPTにはスターターとスターターが使用されていましたが、これは行き止まりの開発ブランチでした。 拒絶 スムーズな調整開始電流により、ここで妥当な妥協点を見つけることができます。 実際、今では車を加速するようにエンジンを始動するように見えます。 先に進みます 1速、次に2、3をオンにすると、高速道路を4速で急いでいます。 この場合のみ、「送信」、つまり電流、スイッチ 自動スターター。 このすべての電気工学は、2つの問題を同時に解決します- スムーズなスタート過負荷がなく、電力網(モーター電源)を無傷に保つDPT。 DCモーターの動作原理と同様に、この自動化は 直接変換。 回転開始前の入力電流と巻線の電流のバランスとして、スムーズに電流が開始値まで上昇します。 回転開始後、電流強度は急激に減少し、「シャフトの回転を調整する」など、さらに2〜3回増加します。
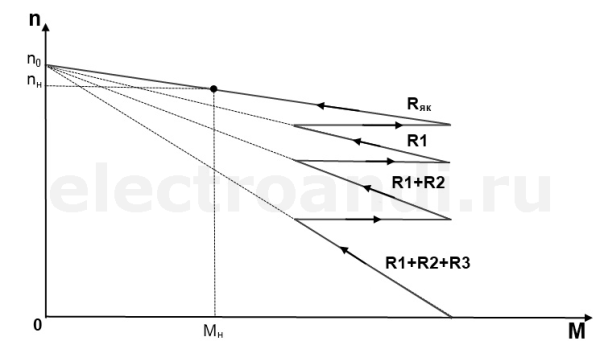
このように、打ち上げは「スムーズ」ではなくなりましたが、誰にとっても安全になりました。 そのようなスキームで救われた最も重要なこと、そして今日それは最も一般的です、主な利点は トルク。 同時に、信頼性の高いDCモーターの構築が簡単になり、電力が増加し、始動電流はこのクラスのモーターにとって頭痛の種であり続けますが、メカニズムにとって重要ではなくなりました。
DCモーターのアプリケーション
DCモーター、および私たちが検討したデバイスと動作原理であるDCマシンは、ネットワークへの永続的な接続を使用することが実際的でない場合に使用されます(良い例は、DCであるカースターターです)。接続が不可能な場合(たとえば、子供用のモーター付きおもちゃ)、またはそのような接続でさえ十分でない場合。 たとえば、ACネットワークに接続されているように見える鉄道輸送ですが、必要なトルクはDCモーターのみを使用できるようなものであり、その原理は変更されていません。 実際、近年、範囲は縮小されておらず、拡大されているだけです。 どのように より多くの容量バッテリーが長ければ長いほど、そのようなエンジンは自律的に動作します。 寸法が小さいほど、パワーゲインは大きくなります。

経済-これは将来の問題です。保存する特別なものはなく、質問は提起されませんでしたが、可変エンジンはより単純になります。 しかし、彼らはDPTを追い出すことはできません。 それらはそうです-DPT、または直流機、私たちが6年生から8年生で研究した装置と原理ですが、ずっと前にそれを忘れていました。
広範囲の速度制御が必要なドライブでは、電気DCモーターが使用されます。 回転速度を高精度に維持し、必要な調整を行うことができます。
DCモーターの装置
このタイプのエンジンの動作はに基づいています。 電流が流れる導体を磁場に入れると、それに応じて一定の力が作用します。
導体が磁力線と交差すると、導体が誘導されます 起電力電流の流れと反対の方向に向けられます。 その結果、反発が生じます。 変化が起こっています 電力導体の同時加熱を伴う機械的なものに。
デバイスの構造全体は、電機子とインダクタで構成されており、その間にエアギャップがあります。 インダクタは固定磁場を生成し、フレームに固定された主極と追加極を含みます。 励起巻線は主極に配置され、磁場を生成します。 追加の極には、スイッチング条件を改善する特別な巻線が含まれています。
アーマチュアには磁気システムが含まれています。 彼女 基本要素溝に配置された作動巻線、別個の金属シート、およびコレクターであり、その助けを借りて、直流が作動巻線に供給されます。
コレクターはシリンダーの形で作られ、モーターシャフトに取り付けられています。 アンカー巻線の端は、その突起にはんだ付けされています。 電流は、専用ホルダーに固定され、特定の位置に固定されたブラシを使用してコレクターから除去されます。
基本的なプロセス:始動とブレーキ
各DCモーターは、始動とブレーキの2つの主要なプロセスを実行します。 起動の最初の段階では、電機子は定常状態にあり、EMFと反対の電圧と力はゼロに等しくなります。 わずかな電機子抵抗で、始動電流の値が公称値を約10倍超えています。 始動時の電機子巻線の過熱を避けるために、特別な始動レオスタットが使用されます。 最大1キロワットのエンジン出力で、直接始動が実行されます。
DCモーターで使用されるブレーキのいくつかの方法があります。 ダイナミックブレーキ中、電機子巻線は短絡されるか、抵抗器の助けを借りて短絡されます。 この方法は、最も正確な停止を提供します。 回生ブレーキが最も経済的です。 ここでは、EMFの方向が反対方向に変化しています。
逆ブレーキは、電機子巻線の電流と電圧の極性を変更することによって実行されます。これにより、有効なブレーキトルクを作成できます。
DCモーターのしくみ
スパークが発生します。 これにより、マシンの信頼性が低下し、その範囲が制限されます。
DPTの重大な欠点は、それらの予備的な変換が必要なことです。 電気エネルギー交流を直流電気エネルギーに変換します。
13.2。 DCモーターの装置と動作原理
DCモーターは、次の3つの主要部分で構成されています。
– 固定部分はインダクター付きのフレームです。
– 回転部分-アンカー;
– アーマチュアシャフトに取り付けられ、それと一緒に回転するコレクター。
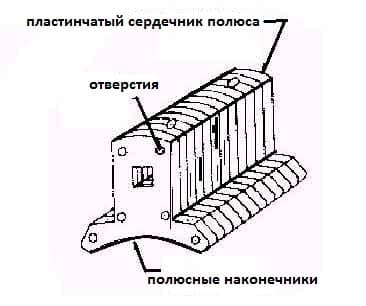
インダクター-機械のフレームの周囲に設置された固定電磁石(ポール)のシステムで、コア、磁束と巻線の必要な分布を作成するために必要なポールピースで構成されています。
励起巻線と呼ばれます。
コアとポールピースは鋼板製です。
ベッド(鋳造または溶接)は鋳鉄または鋼でできており、ポールとベアリングシールドが取り付けられており、アーマチュアシャフトベアリングが固定されています。 ベッドは機械のヨークでもあり、磁気回路を確実に閉じます。
インダクタの目的は、界磁巻線に電流が流れるときに磁束を生成することです。
アーマチュアは、歯付きコアと敷設された巻線で構成されています
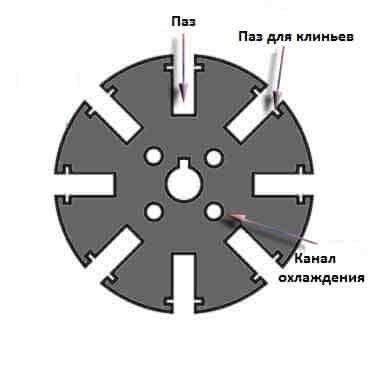
の と呼ばれるコアの溝アンカー巻線。アーマチュアコアはシート電気で作られています
鋼(厚さ0.5 mm)から、溝のあるディスクが刻印されます。 ディスクは、渦電流損失を減らすために絶縁ワニスでコーティングされています。
電機子巻線は、絶縁されたコイルの形のセクションです 銅線.
巻線方式はループまたはウェーブであり、コイルは直列および並列に接続できます。 単純なループ巻線には、低電力の2極機があります
(最大1 kW)および500kWを超える電力の機械。 単純な波巻きは、小型および小型の機械に使用されます ミディアムパワー(最大500 kW)110V以上の電圧で。
アーマチュアの目的は、アーマチュア巻線の電流を励起電流によって生成された極の磁場と相互作用させることによって電磁トルクを生成することです。
コレクターは、くさび形の銅板(「あり継ぎ」の形)で構成された中空のシリンダーであり、互いにおよび本体から分離されています。 コレクタープレートも機械のシャフトから分離されています。
組み立てられたコレクターはアーマチュアシャフトに取り付けられています。 アーマチュアの溝に配置された巻線セクションの始点と終点は、コレクタープレートにはんだ付けされています。
コレクターには固定式のエレクトログラファイトブラシが取り付けられています。 回転電機子巻線は、ブラシと整流子の間のスライド接点によって外部回路に接続されています。
ブラシは閉じた電機子巻線を並列分岐に分割します。並列分岐の数はブラシの数に等しいため、ブラシのEMF(マシンのEMF)は1つの並列分岐のEMFに等しくなります。
コレクターは電気機械コンバーターであり、1つの極のゾーンから移動する電機子巻線の導体の電流の方向を変更することにより、(モーターの場合)方向にトルク定数を作成します。
別の領域に。
で 発電機では、コレクターが回転電機子巻線に誘導される可変EMFの整流を提供します。
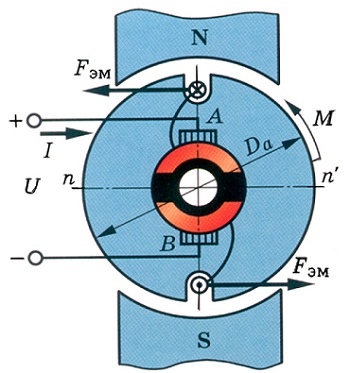
のDPT指定 電気回路図動作原理を図1に示します。 97 a、b。
F EM |
||
DC電源からの電圧が固定電機子の端子に印加されます。 アーマチュアの電流の方向IIを図のようにします。 97b。
で 励起巻線インダクタの極にある直流電流も供給され、電機子を貫通する磁場を生成します。 インダクタの極がでできている場合 硬磁性材料その場合、それらに励起巻線がない可能性がありますが、磁場は反対に磁化された極(NとS)によって作成されます。
極の磁場と電機子電流の相互作用により、電磁力F EMが形成され、トルクが発生します。
M C F I、
ここで、Cmは比例係数です。 FはDPTの励起流、IIはDPTの電機子電流です。
磁界内で回転するDPT電機子では、電機子電流の方向と反対のEMFが誘導されるため、このEMFは逆起電力または逆起電力と呼ばれます。
E CE F n、
ここで、CEは比例係数です。 Ф–DPT励起フロー;n –DPT回転周波数。
基本的なエンジン方程式
Uc \ u003d E + Iya Rya、
ここで、U sは主電源電圧、I iは電機子電流、Riは電機子巻線の抵抗です。
電機子電流はどこから来るのですか
IiUсRiE。

この式に値Eを代入すると、DCモーターの速度が得られます。
U c | 私 | |||
C EF |
||||
この式から、DCTの回転速度は入力電圧の大きさ、励起電流(磁束)に依存することがわかります。
ФIc)、アンカーチェーンR iの抵抗、およびシャフトIiへの負荷。
13.3。 DCモーターの種類
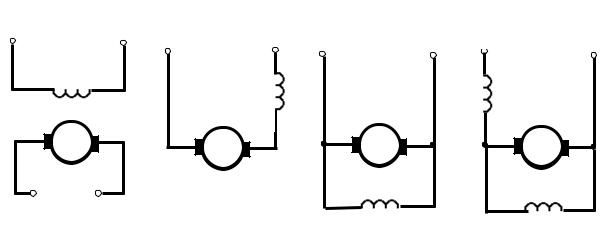
励起巻線と電機子巻線の接続方法により、DCTは以下のタイプに分類されます。
– 独立した励起を伴うDPT(図98、a);
– 順次励起を伴うDPT(図98、b);
– 並列励起を伴うDPT(図98、c);
– 混合励起によるDPT(図98、d)。
で 独立した励起を伴うDPT励起巻線電機子巻線は さまざまなソース。 励起巻線は、H1-H2と指定されます(図98、a)。
高出力モーターは通常、独立した励起で実行されます。
で DCTシリーズ励起励起巻線が接続されています続けて電機子巻線への接続はシリアルと呼ばれます(C1-C2、図98、b)。
で 直列励起のモーターでは、負荷時のトルクは並列励起のモーターよりも増加します。エンジン回転数を下げながら。この特性は、機械製造の電気機関車、都市交通におけるDPTの広範な使用を決定します。
ただし、エンジン速度が許容周波数を超える可能性があり、これが事故につながる可能性があるため、無負荷で連続励起でエンジンを始動することは許容されません。エンジンは「故障」して動作します。
で 並列励起励起巻線が接続されたDCTシャントと呼ばれる電機子巻線と並列
(W1-W2、図98、c)。
並列励起のモーターは、さまざまな負荷の下で安定した速度を提供し、この速度をスムーズに調整する可能性があります。 そのため、さまざまな負荷の下で一定速度を必要とする電気駆動には、並列励起のDCTが使用されます。
と それのスムーズな広い規制。 Z1
混合励起のDCTは始動トルクが最も高く、大きな始動トルクが必要な場合や、コンプレッサーの始動など、短期間の過負荷や高加速が発生する可能性がある場合に使用されます。
要件に応じて、並列および直列の励起巻線を「一致」または「反対」に接続できます。 「子音」を含めると、巻線の磁束は同じように方向付けられ、「カウンター」で合計され、減算されます。
ご存知のように、DCモーターは、その2つの主要な構造部品の助けを借りて、電気エネルギーを機械エネルギーに変換できるデバイスです。 これらの重要な詳細は次のとおりです。
- 固定子-電力が供給される励起巻線を含む、エンジンの固定/静的部分。
- ローター-機械的な回転を担うエンジンの回転部分。
DCモーター設計の上記の主要部分に加えて、次のような補助部分もあります。
- 襟;
- ポール;
- 励起巻線;
- アーマチュア巻線;
- コレクタ;
- ブラシ。
これらすべての部品が一緒になって、DCモーターの一体型設計を構成します。 それでは、電気モーターの主要部分を詳しく見ていきましょう。

主に鋳鉄または鋼でできているDCモーターのヨークは、モーターの固定子または静的部分の不可欠な部分です。 彼の 主な機能エンジンのより薄い内部部品のための特別な保護コーティングを形成すること、および電機子巻線のサポートを提供することで構成されています。 さらに、ヨークはDCモーターの磁極と界磁巻線の保護カバーとして機能するため、励起システム全体をサポートします。
ポール
DCモーターの磁極は、固定子の内壁にボルトで固定された本体部品です。 磁極の設計は、基本的には極心と極片の2つの部分のみで構成されており、油圧の影響を受けて互いに結合され、固定子に取り付けられます。
ビデオ:DCモーターの設計と組み立て
とにかく、2つの部分は異なる目的を果たします。 たとえば、ポールコアの面積は小さいです 断面ポールピースをヨークに保持するために使用され、比較的大きな断面積を持つポールピースは、固定子と回転子の間のエアギャップ上に生成された磁束を伝播して磁気抵抗の損失を減らすために使用されます。 。 さらに、ポールピースには複数の励起巻線溝があり、励起磁束を生成します。

DCモーターの励起巻線は、励起電流が巻線を通過するときに隣接する極で反対の極性が発生するように、極片の溝に励起コイル(銅線)を巻いて作られています。 本質的に、励起巻線は、電気モーターの回転子が回転する励起流を生成し、それを簡単かつ効果的に停止することができる一種の電磁石として機能します。
アーマチュア巻線
DCモーターの電機子巻線は、回転子または機械の回転部分に取り付けられており、その結果、その回転経路に沿って変化する磁場の影響を受け、磁化損失に直接つながります。
このため、ローターは、ヒステリシス損失や渦電流損失などの磁気損失をそれぞれ低減するために、いくつかの低ヒステリシス電磁鋼板で作られています。 積層鋼板を接合し、アンカー本体に円筒構造を持たせています。
アーマチュアの本体は、アーマチュア巻線が取り付けられているコアと同じ材料で作られた溝(スロット)と、アーマチュアの周囲に均等に配置された数ターンの銅線で構成されています。 溝の溝は多孔質のくさび形の接合部を持ち、ローターの回転中に放出される大きな遠心力の結果として、また供給電流と磁気励起の存在下で導体が曲がるのを防ぎます。
DCモーター電機子巻線の設計には2つのタイプがあります。
- ループ巻線(この場合、アダプター間の並列電流パスの数(A)は、極の数(P)、つまりA \u003dPに等しくなります。
- 波巻き(この場合、アダプター(A)間の並列電流パスの数は、極の数に関係なく常に2です。つまり、マシンはそれに応じて設計されています)。
コレクタ

DCモーター整流子は、積み重ねられた円筒構造ですが、マイカ、銅セグメントで絶縁されています。 DCTについて言えば、コレクターは主に、ネットワークから電気モーターのブラシを介して回転構造に取り付けられた電機子巻線に電源電流を切り替えるまたは転送する手段として使用されます。
ブラシ

DCモーターブラシはカーボンまたはグラファイト構造でできており、回転する整流子の上にスライド接点またはスライダーを作成します。 ブラシは伝達するために使用されます 電流外側のループからコレクターの回転形式に移動し、そこで電機子巻線に入ります。 電気モーターの整流子とブラシは、一般に、静的な電気回路から機械的に回転する領域、または単にローターに電気エネルギーを転送するために使用されます。
DCモーター DCエネルギーを機械的仕事に変換するように設計されています。
DCモーターはACモーターよりもはるかに一般的ではありません。 これは主に、比較的高いコスト、より複雑なデバイス、および電力供給の難しさによるものです。 しかし、これらすべての欠点にもかかわらず、DPTには多くの利点があります。 たとえば、ACモーターは調整が困難ですが、DCTはさまざまな方法で完全に調整されます。 さらに、DCTはより剛性の高い機械的特性を備えており、大きな始動トルクを可能にします。
DC電気モーターは、さまざまなアクチュエーターとして、電気輸送の牽引モーターとして使用されます。
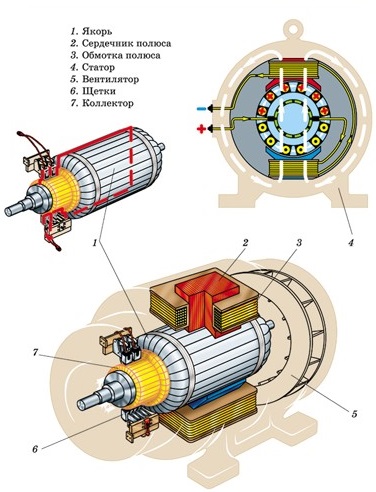
DCモーターの装置
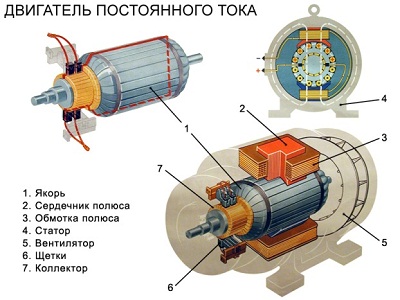
DCモーターの設計はACモーターに似ていますが、それでも大きな違いがあります。 鋼製のフレーム7には、コイル6の形の励起巻線が取り付けられています。DCモーターの特性を向上させるために、追加の極5を主極の間に取り付けることができます。 コアとコレクター2で構成されるアンカー4が内部に取り付けられ、モーターハウジングのベアリング1を使用して取り付けられます。 コレクターはACモーターとの大きな違いです。 ブラシ3に接続します。これにより、アンカー回路に電圧を供給したり、発電機で電圧を除去したりできます。
動作原理
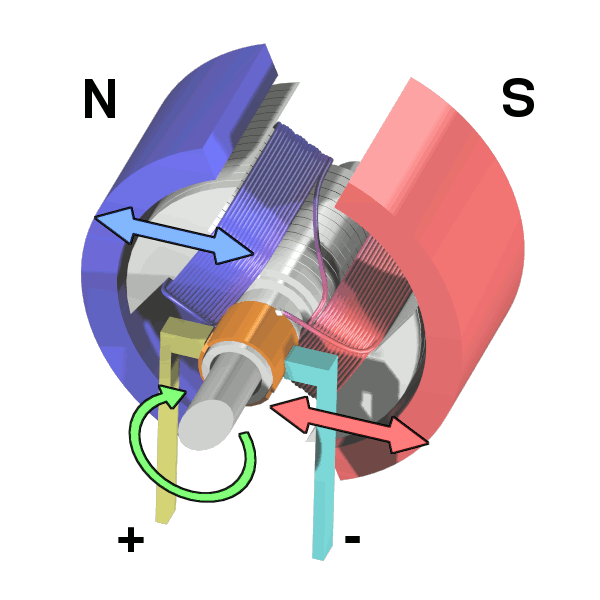
DPTの動作原理は、励起巻線と電機子の磁場の相互作用に基づいています。 電機子の代わりに電流が流れるフレームがあり、励起巻線の代わりにN極とS極の永久磁石があります。フレームに直流電流が流れると、永久磁石の磁場が発生します。それに作用し始めます。つまり、フレームが回転し始めます。電流の方向が変わらないため、フレームの回転方向は同じままです。
モーター端子に電圧が印加されると、電機子巻線に電流が流れ始めます。これは、すでにご存知のとおり、電機子が回転し始め、電機子が磁気で回転するため、機械の磁界が電機子巻線に作用し始めます。フィールド、EMFが形成され始めます。 このEMFは電流に逆らって方向付けられ、これに関連してカウンターEMFと呼ばれます。 それは式を使用して見つけることができます
ここで、Фは励起磁束、nは回転速度、Ceは機械の設計モーメントであり、一定のままです。
端子の電圧は、電機子回路の電圧降下の量だけ逆起電力よりも大きくなります。
![]()
そして、この式に電流を掛けると、パワーバランスの式が得られます。
![]()
式UIiの左側は電気モーターに供給される電力を表し、右側の第1項EI iは電磁電力を表し、第2項I iRiは電機子回路の損失電力を表します。