単相ソフトスターター。 ソフトスターター - 何をどのように
誘導電動機の始動には多くの電流とトルクが必要であり、モーター巻線を焼損する可能性があるため、誘導電動機のソフト始動は常に困難な作業です。 エンジニアは、スイッチング回路や単巻変圧器などの使用など、この問題を克服するための興味深い技術的解決策を常に提案し、実装しています。
現在、このような方法は、電気モーターのスムーズな動作のためにさまざまな産業設備で使用されています。
物理学から、誘導電動機の動作原理が知られています。その本質は、固定子と回転子の磁場の回転周波数の違いを利用することです。 ステータの磁場に追いつこうとするロータの磁場は、大きな励磁に寄与します。 始動電流. モーターは全速力で動作しますが、トルク値も電流に従って増加します。 その結果、過熱によりユニットの巻線が損傷する可能性があります。
したがって、ソフトスターターを取り付ける必要があります。 三相非同期モーターのソフトスターターは、誘導モーターのスリップ効果による初期の高電流とトルクからユニットを保護するのに役立ちます。
ソフトスターター (SCD) を備えた回路を使用する利点:
- 始動電流の減少;
- エネルギーコストの削減;
- 効率の向上;
- 比較的低コスト;
- ユニットに損傷を与えずに最高速度を達成します。
エンジンをスムーズに始動するには?
5 つの基本的なソフトスタート方法があります。
- 図のようにロータ回路に外付け抵抗を加えることで、高トルクを発生させることができます。
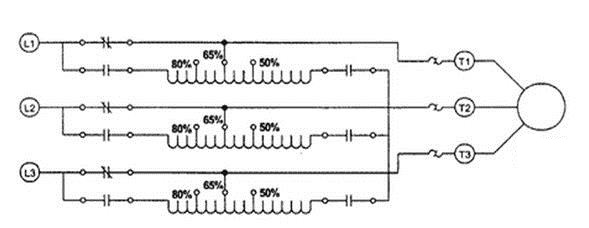
- 自動変圧器を回路に組み込むことにより、初期電圧を下げて始動電流とトルクを維持することができます。 下の図を参照してください。
- 直接始動は、誘導電動機が電源に直接接続されているため、最も簡単で安価な方法です。
- 特別な巻線構成での接続 - この方法は、通常の状態での動作を目的としたモーターに適用できます。
- SCP の使用は、リストされているすべての方法の中で最も高度です。 ここでは、誘導電動機の速度を調整するサイリスタや SCR などの半導体デバイスが、機械部品の置き換えに成功しています。
コレクターモータースピードコントローラー
家庭用電化製品や電動工具の回路のほとんどは、220 V のコレクター電気モーターに基づいて作成されています. この需要は、その汎用性によるものです. ユニットは、直流または交流電圧で給電できます。 この回路の利点は、有効な始動トルクが提供されることです。
よりスムーズな始動を実現し、速度を調整できるようにするために、速度コントローラーが使用されます。
たとえば、このようにして、自分の手で電気モーターを始動できます。
結論
ソフトスターターは、エンジン始動性能の向上を制限するように設計および製造されています。 そうしないと、望ましくない現象により、ユニットが損傷したり、巻線が焼損したり、動作回路が過熱したりする可能性があります。 耐用年数を長くするには、ソフトスタートモードで三相モーターが電力サージなしで動作することが重要です。
誘導電動機が目的の速度になるとすぐに、信号が送信されて回路リレーが開きます。 ユニットは、過熱やシステム障害なしでフルスピードで動作する準備が整います。 提示された方法は、産業および国内の問題を解決するのに役立ちます。
モーター ソフト スターターは、ソフトな加速とソフトな減速、および三相誘導モーターの保護のために設計された静的な電子または電気機械デバイスです。
ソフトスターターのソフトスターターは、始動電流の量を減らし、モーターのトルクと負荷のトルクを一致させるのに役立ちます。
ソフトスターターの動作原理
モーターに供給される電圧は、サイリスターの開き角度を変えることによって制御されます。 このデバイスには、正と負の半サイクル用に設計された 2 つの連続したサイリスタが含まれています。 制御されていない第 3 フェーズの電流強度は、制御下にあるフェーズの電流の合計です。
チューニング後、マシンの始動トルク値は非常に低い始動電流に最適化されます。 モータ電流値は、始動時の始動電圧設定値と並行して減少します。 始動トルクの大きさは、電圧に対して 2 次関係で減少します。
電圧レベルは、モーターの始動および停止時の始動電流とモーター トルクを制御します。
サイリスタをバイパスするデバイス内のバイパス接点の存在は、サイリスタ内の熱損失を低減するのに役立ち、したがって、デバイス全体の加熱を低減します。 組み込みの電子アーク システムは、電源の中断、振動、接触不良などの予期しない誤動作による損傷が発生した場合に、接触を保護します。

極性バランス
非同期モーターのソフトスターターにおける 2 相制御の欠点は、相切断と相電流の重畳によって引き起こされる直流電流の出現で明らかになり、電気モーターから放出される強い音響ノイズが発生します。
「バランス極性」方式を使用すると、モーター加速中のDC値の影響がそれぞれ大幅に減少し、 音響性能これは、エンジンの加速中に異なる極性の半波のバランスを取ることによって達成されます。
デバイス インターフェイス
ソフトスターター「マンマシン」のソフトスターターインターフェースにより、パラメーターを構成できるため、エンジンの始動と操作のプロセスが大幅に容易になり、簡素化されます。 内蔵ポンプ制御によりウォーターハンマーを防止。

![]()
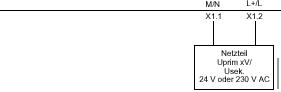
図 4. モーターソフトスターター - フィーダーの組み合わせ図なので-インターフェース
インターフェイスは、セグメント インジケータを備えた 2 つのディスプレイと、かなりの距離から視認できる LCD ディスプレイで構成され、パラメータとメッセージの説明が含まれています。
ハードウェア機能には、プログラミング モードの選択と言語オプションが含まれます。 あるデバイスから別のデバイスにパラメータをコピーして、プログラミングの速度を上げ、機器の信頼性を高め、同じマシンで同一のパラメータを修正して入力できるようにします。
単相モーターのソフトスタート
ソフトスタータ 単相電動機は、日常生活で使用され、出力 L1 と L2 に ~ U が適用されるとアクティブになります。
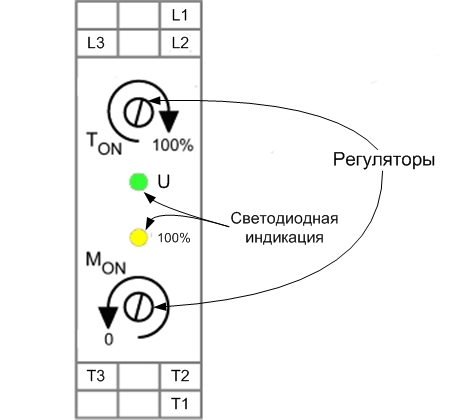
限界値に達するまで、一定期間、線形電圧の値が増加します。 結論 T-2 と T-3 は、常に主電源から電力を供給されています。 処理時間はレギュレータによって最大 20 秒の範囲で調整されます。 電圧パラメータが増加すると、トルクが増加します。 起動が完了すると、モーターはバイパス コンタクタ (バイパス) を介して主電源から接続されます。
ポンプモーターソフトスターター
周波数変換器を使用したポンプのソフトスターターは、次の操作を実行します。
- ポンピングユニットのソフトスタートとブレーキングの実装。
- レベルインジケーターと液体圧力パラメーターに応じた自動切り替えの生成。
- 「空運転」、つまり液体なしでのユニットの保護。
- 電圧パラメータが大幅に低下した場合のユニットの保護。
- コンバーターの入力における過電圧に対する保護アクションの実装。
- ユニットのオン、オフ、および事故の場合の信号。
- 局所暖房を提供します。
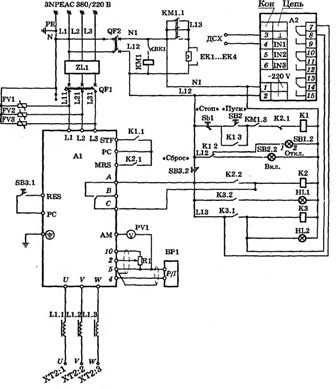
電気モーターはから接続されています 連絡先 U、V、W周波数変換器。 開始ボタン SB2 は、その接点グループを介してリレー K1 をトリガーし、周波数変換器の STF 入力と PS 入力が接続されます。 ソフトスタート抵当権に従って実行される電動ポンプ ソフトウェアデバイス設定に含まれています。
圧力センサー BP1 は、コンバーターの入力から電力を供給されます。これにより、圧力安定化回路でフィードバックを行うことができます。 このシステムの動作は、PID コントローラーを提供するときに発生します。 ポテンショメータ K1 または周波数変換器は、設定された圧力パラメータを維持する機能を実行します。 「空運転」が発生した場合、ポンピングユニットは保護のためにオフにする必要があります。この場合、K3リレーのコイル回路の接点7-8が閉じ、「空運転」センサーが抵抗から接続されるとシャットダウンが発生します。リレー A2 がトリガーされます。 リレー K2 は、事故の場合にユニットの電気モーターをオフにする保護機能を実行します。 事故が発生した場合、ランプНL1が点灯し、センサーが水位の低下に応答して許容できない値になった後、ランプНL2が点灯します。
VK1 サーマル リレーは、KM1 コンタクタ制御キャビネット、EK1 および EK2 電気ヒーターの加熱をオンにします。 デバイスは、自動 QF1 によって短絡電流と過負荷から保護されます。
高電圧ソフトスターター機能
に 特徴的な機能関連:
- サイリスタの光ファイバー制御の存在。
- マイクロプロセッサの管理。
- 高温で作業する能力。
- 始動と制動のさまざまなアルゴリズムと特性を設定する機能 他の種類ロードします。
- 知的保護能力。
- 微弱電源でも起動可能。
- IP 00 から IP 65 までの保護等級の実装
重要:ソフトスターターを調整するときは、設定された加速時間をモーターの物理的な加速時間よりも長くする必要があります。そうしないと、開始時間が経過した後に内部バイパス接点が閉じられるため、デバイスが損傷する可能性があります。 エンジンが加速しない場合、バイパス コンタクト システムが故障する可能性があります。
重要:自動再起動は、デバイスを損傷するだけでなく、死亡や重傷につながる危険性があります。
リセット コマンドの後に開始コマンドがある場合、再起動が自動的に実行されるため、開始コマンドはリセット コマンドの前にリセットする必要があります。 これは特にエンジン保護に当てはまります。
安全上の理由から、一般的なエラー出力を制御システムに接続することをお勧めします。
おすすめ: 自動起動は望ましくないため、位相または負荷障害デバイスなどの追加コンポーネントを制御および主電流回路に接続する必要があります。
ソーシャル メディアで役立つコンテンツを共有する
印刷する
電気駆動
ソフトスターター:正しい選択
以前に周波数変換器の特性について説明しましたが、今日はソフトスターターの番です(ソフトスターター、ソフトスターター - 単一の用語はまだ落ち着いていないため、この記事では「ソフトスターター」という用語を使用します - SCP) .
売り手の口から、ソフトスターターを選ぶのは簡単だという意見を聞かなければならないことがあります。 本当じゃない。 ソフトスターターの選択はより困難です。 この複雑さが何であるかを理解してみましょう。
SCPの目的
名前が示すように、デバイスのタスクは整理することです スムーズなスタート誘導電動機 交流電流. 事実は、直接始動中(つまり、モーターが従来のスターターを使用して主電源に接続されている場合)、モーターは定格電流の5〜7倍の始動電流を消費し、それよりもはるかに高い始動トルクを発生させることです。評価されたもの。 これはすべて、次の 2 つのグループの問題につながります。
1)起動が速すぎて、油圧ショック、機構のガクガク、バックラッシュのショック選択、コンベアベルトの破損など、さまざまなトラブルにつながります。
2) スタートが重くて完走できない。 ここでは、まず「ハード スタート」という用語と、ソフト スターターの助けを借りてその「促進」の可能性を定義する必要があります。 「重いスタート」には、通常、次の 3 種類のスタートが含まれます。
a) スタートアップ、供給ネットワークにとって「重い」 - ネットワークは、ほとんど提供できない、またはまったく提供できない電流を必要とします。 特徴的な機能:起動中、システムの入力のオートマトンがオフになり、起動中にライトが消え、一部のリレーとコンタクタがオフになり、電源ジェネレータが停止します。 ほとんどの場合、UPP はここの問題を本当に修正します。 ただし、最良の場合、始動電流を 定格電流モーター、そしてこれで十分でない場合、解決策は1つだけです-周波数変換器を使用する必要があります。
b) エンジンは直接始動時にメカニズムを始動できません。エンジンはまったく回転しないか、特定の速度で「フリーズ」し、保護がトリガーされるまでその状態を維持します。 残念ながら、ソフトスターターは彼を助けません-エンジンはシャフトに十分なトルクを持っていません。 周波数変換器がこのタスクに対処する可能性はありますが、この場合は調査が必要です。
c)エンジンは自信を持ってメカニズムを加速しますが、公称周波数に到達する時間がありません-入力の自動機がトリガーされます。 これは、かなり高速の重いファンでよく発生します。 ここではソフトスターターが役立つ可能性が高いですが、失敗のリスクは残ります。 保護動作時の機構が公称速度に近いほど、成功する確率が高くなります。
ソフトスターターによるスタートアップ組織
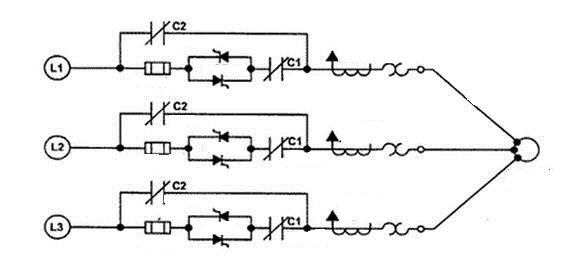
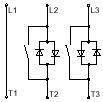
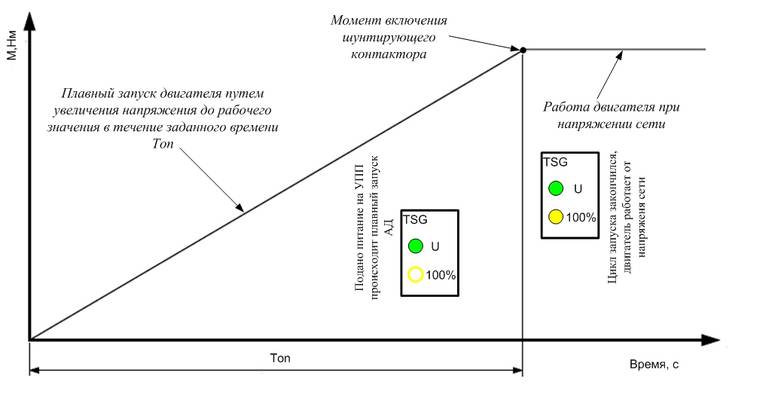
ソフトスターターの動作原理は、ネットワークからソフトスターターを介して負荷に供給される電圧が、特別な電源スイッチ - トライアック (または逆並列接続されたサイリスター) によって制限されることです - 図を参照してください。 1. その結果、負荷の電圧を調整できます。
ちょっとした理論: 起動プロセスは変換プロセスです 電気エネルギー定格速度で動作するメカニズムの運動エネルギーへの動力源。 非常に単純化した方法で、このプロセスは次のように説明できます。加速中、モータ抵抗 R はエンジン停止時の非常に小さな値から定格速度での非常に大きな値まで増加するため、電流はオームの法則に従って次のようになります。に:
私 = U / R (1)
非常に大きいことが判明し、エネルギー移動
E \u003d P x t \u003d I x U x t (2)
とても早い。 ネットワークとモーターの間にソフトスターターが設置されている場合、式(1)はその出力に作用し、式(2)は入力に作用します。 両方の式の電流が同じであることは明らかです。 ソフトスターターは、モーターの電圧を制限し、抵抗の増加に続いてモーターが加速するにつれて徐々に増加させ、消費される電流を制限します。 したがって、式(2)によると、必要なエネルギーEとネットワーク電圧Uが一定の場合、電流Iが低いほど、起動時間tは長くなります。 このことから、電圧を下げることにより、始動が速すぎることに関連する問題と、始動が速すぎることに関連する問題の両方が解消されることがわかります。 大電流ネットワークから消費されます。
ただし、私たちの計算では、加速するために追加のトルクが必要な負荷が考慮されていないため、追加の電流が必要になるため、電流をあまり減らすことはできません。 負荷が高い場合、低電圧での始動は言うまでもなく、直接始動でもモーターシャフトのトルクが十分でない場合があります-これは、上記のハードスタートオプション「b」です。 電流が減少すると、トルクが加速に十分であることが判明したが、式(2)の時間が増加すると、機械は動作する可能性があります-その観点からすると、電流が流れる時間は大幅に超えます公称値が許容できないほど長い (ハード スタート オプション "c")。
ソフトスターターの主な特徴。 電流制御の可能性. 本質的に、これはソフトスターターが電圧を調整して、電流が特定の特性に従って変化する機能です。 この関数は、通常、現在の関数で開始と呼ばれます。 そのような機会がない最も単純なソフトスターターは、時間の関数として電圧を調整するだけです。 モーターの電圧は、一定時間、初期から公称まで徐々に増加します。 多くの場合、特にグループ 1 の問題を解決する場合はこれで十分です。しかし、ソフトスターターを取り付ける主な理由が電流制限である場合は、正確な調整が不可欠です。 この機能は、ネットワークの電力が限られているため (小さな変圧器、弱い発電機、細いケーブルなど)、最大許容電流を超えると事故が発生する場合に特に重要です。 さらに、電流制御を備えたソフトスターターは、始動プロセスの開始時にスムーズな増加を実現できます。これは、突然の負荷サージに非常に敏感な発電機から操作する場合に特に重要です。
シャントの必要性。
起動プロセスの終了時と到達時 定格電圧エンジンでは、電源回路からソフトスターターを取り外すことが望ましいです。 このために、ソフトスターターの入力と出力を段階的に接続するバイパスコンタクターが使用されます(図2を参照)。
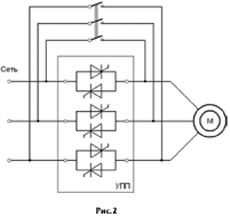 ソフトスターターからのコマンドで、このコンタクターが閉じ、電流がデバイスの周りを流れ、そのパワー エレメントが完全に冷却されます。 ただし、シャント回路がない場合でも、エンジンの全動作中に公称電流がトライアックを流れる場合 電源電流、起動モードと比較してそれらの加熱が小さいことが判明したため、多くのソフトスターターはシャントなしで操作できます。 この可能性の代償として、定格電流がわずかに低くなり、パワー スイッチから熱を除去するためにヒートシンクが必要になるため、重量と寸法が大幅に増加します。 一部のソフトスターターは反対の原理に基づいて構築されています-バイパスコンタクターが既に組み込まれており、バイパスなしで動作するように設計されていないため、冷却ラジエーターが減少するため、それらの寸法は最小になります。 これは、価格と結果として生じる接続スキームの両方にプラスの効果をもたらしますが、開始モードでの動作時間は他のデバイスに比べて短くなります。
ソフトスターターからのコマンドで、このコンタクターが閉じ、電流がデバイスの周りを流れ、そのパワー エレメントが完全に冷却されます。 ただし、シャント回路がない場合でも、エンジンの全動作中に公称電流がトライアックを流れる場合 電源電流、起動モードと比較してそれらの加熱が小さいことが判明したため、多くのソフトスターターはシャントなしで操作できます。 この可能性の代償として、定格電流がわずかに低くなり、パワー スイッチから熱を除去するためにヒートシンクが必要になるため、重量と寸法が大幅に増加します。 一部のソフトスターターは反対の原理に基づいて構築されています-バイパスコンタクターが既に組み込まれており、バイパスなしで動作するように設計されていないため、冷却ラジエーターが減少するため、それらの寸法は最小になります。 これは、価格と結果として生じる接続スキームの両方にプラスの効果をもたらしますが、開始モードでの動作時間は他のデバイスに比べて短くなります。
調整可能なフェーズ数。
このパラメータによると、ソフトスターターは二相と三相に分けられます。 2 フェーズでは、名前が示すように、キーは 2 フェーズでのみインストールされ、3 番目のフェーズはエンジンに直接接続されます。 長所 - 暖房の削減、サイズと価格の削減。
短所 - 位相電流消費が非線形で非対称であり、特別な制御アルゴリズムによって部分的に補償されますが、それでもネットワークとモーターに悪影響を及ぼします。 ただし、頻繁に起動しない場合、これらの欠点は無視できます。
デジタル制御。ソフトスターターの制御システムには、デジタルとアナログがあります。 通常、デジタル ソフト スターターはマイクロプロセッサに実装され、デバイスの動作プロセスを非常に柔軟に制御し、さまざまな機能を実装できます。 追加機能と保護、および上位レベルの制御システムとの便利な表示と通信を提供します。 アナログソフトスターターの制御では、操作要素が使用されるため、機能の豊富さが制限され、設定はポテンショメーターとスイッチによって実行され、外部制御システムとの通信は通常、追加のデバイスを使用して実行されます。
追加機能
保護。あなたを除いて 主な機能- ソフトスタートの構成 - ソフトスターターには、メカニズムとエンジンの保護の複合体が含まれています。 原則として、この複合体には、過負荷および電源回路の障害に対する電子保護が含まれています。 追加のセットには、起動時間の超過、位相の不均衡、位相シーケンスの変更、低すぎる電流 (ポンプのキャビテーションに対する保護)、ソフトスターター ラジエーターの過熱、ネットワーク周波数の低下などに対する保護が含まれる場合があります。 多くのモデルは、モーターに組み込まれたサーミスターまたはサーマル リレーに接続できます。 ただし、ソフトスターターは、負荷回路の短絡からそれ自体またはネットワークを保護できないことに注意してください。 もちろん、ネットワークは導入機によって保護されますが、ソフトスターターは短絡が発生した場合に必然的に故障します。 いくつかの慰めは、適切な設置による短絡が即座に発生しないことだけです。負荷抵抗を減らす過程で、ソフトスターターは確実にオフになりますが、シャットダウンの理由を確認せずに再度オンにしないでください。 .
減速。一部のソフトスターターは、いわゆる疑似周波数制御を実装できます-モーターを低速に移行します。 これらの速度の低下がいくつかある場合がありますが、それらは常に厳密に定義されており、ユーザーが調整することはできません。
さらに、これらの速度での操作は非常に時間制限があります。 原則として、これらのモードは、デバッグのプロセスで、またはメカニズムを微調整する必要がある場合に使用されます。 望ましい位置始業前や終業時。
制動. かなりの数のモデルがモーター巻線に適用できます D.C.、ドライブの集中的なブレーキにつながります。 この機能は通常、次のシステムで必要です。 アクティブロード– エレベータ、傾斜コンベヤ、すなわち ブレーキがなくても自力で動くシステム。 この機能は、通風や別のファンの動作によって反対方向に回転しているファンを事前に始動するために必要になることがあります。
プッシュスタート。始動トルクの高い機構に使用されます。 この機能は、始動の最初に、完全な主電源電圧が短時間(数分の1秒)エンジンに印加され、メカニズムが故障し、その後さらに加速が発生するという事実にあります。ノーマルモード。
省エネポンプとファンの負荷。 ソフトスターターは電圧レギュレーターであるため、軽負荷時にはメカニズムの動作を損なうことなく供給電圧を下げることができます。
これによりエネルギーを節約できますが、電圧制限モードのサイリスタはネットワークにとって非線形負荷であり、その後のすべての結果を伴うことを忘れてはなりません。
メーカーが製品に含める機会は他にもありますが、1 つの記事の量ではそれらをリストするには不十分です。
選考方法
ここで、特定のデバイスの選択に戻ります。
周波数変換器を選択するためのヒントの多くは、ここでも当てはまります。まず、機能の技術的要件を満たすシリーズを選択し、次にそれらの中から特定のプロジェクトの電力範囲をカバーするものを選択し、残りの中から目的のシリーズを選択します。他の基準に従って - メーカー、サプライヤー、サービス、価格、寸法など
1 時間に 2 ~ 3 回しか始動しないポンプまたはファン用のソフトスターターを選択する必要がある場合は、始動するモーターの定格電流以上の定格電流を持つモデルを選択するだけで済みます。 このケースは、アプリケーションの約80%をカバーし、専門家への相談を必要としません。 1 時間あたりの起動回数が 10 回を超える場合は、必要な電流制限と必要な起動遅延の両方を考慮する必要があります。 この場合、サプライヤーの助けが非常に望ましいです。サプライヤーは、原則として、目的のモデルを選択するためのプログラム、または少なくとも計算アルゴリズムを持っています。 計算に必要なデータ: モーター定格電流、1 時間あたりの始動回数、必要な始動時間、必要な電流制限、必要な停止時間、周囲温度、予想されるシャント。
モーターが 1 時間に 30 回以上始動する場合は、より強力なソフトスターター モデルを選択しても問題が解決しない可能性があるため、代わりに周波数変換器の使用を検討する価値があります。 そして、その価格は、機能が大幅に低下し、ネットワークの品質に深刻な影響を与えるコンバーターの価格にすでに匹敵します。
繋がり
ネットワークとエンジンへのデバイスの明らかな接続に加えて、シャントを決定する必要があります。
バイパス コンタクタが定格を切り替え、モータの始動電流を切り替えるという事実にもかかわらず、少なくとも緊急操作の実装のためには、直接始動用に設計されたモデルを使用することが依然として望ましいです。 接続するときの注意 特別な注意フェーズへ - たとえば、ソフトスターターの入力のフェーズ A を出力の別のフェーズに誤って接続すると、バイパス コンタクタの最初のターンオン時に短絡が発生し、デバイスが無効になります。
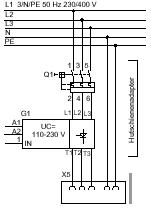
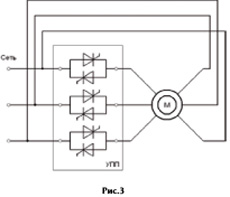
一部のソフトスターターでは、いわゆる 6 線式接続が可能です。その図を図 1 に示します。 3. この接続にはより多くのケーブルが必要ですが、ソフトスターター自体よりもはるかに大きなモーターでソフトスターターを使用することができます。
 ソフトスターターを取り付けるときは、もう 1 つの特性に留意する必要があります。これはしばしば誤解につながります (ヘビースタート "c" を参照)。 計算時 導入機主電源に直接接続されたモーターの場合、長時間流れるモーターの定格電流と、数秒間だけ流れる始動電流が考慮されます。 ソフトスターターを使用すると、始動電流は大幅に減少しますが、最大1分以上流れます。 オートマトンはこれを「理解」することができず、打ち上げがずっと前に完了していると信じており、定格よりも何倍も高い電流が流れているのは、 緊急、システムをシャットダウンします。 これを回避するには、ソフトスタートプロセスの追加モードを設定できる特別なマシンをインストールするか、ソフトスターターを使用するときに始動電流に対応する定格電流を持つマシンを選択してください。 2番目のケースでは、このマシンはモーターを過負荷から保護することはできませんが、ソフトスターター自体がこの機能を実行するため、モーター保護には影響しません。
ソフトスターターを取り付けるときは、もう 1 つの特性に留意する必要があります。これはしばしば誤解につながります (ヘビースタート "c" を参照)。 計算時 導入機主電源に直接接続されたモーターの場合、長時間流れるモーターの定格電流と、数秒間だけ流れる始動電流が考慮されます。 ソフトスターターを使用すると、始動電流は大幅に減少しますが、最大1分以上流れます。 オートマトンはこれを「理解」することができず、打ち上げがずっと前に完了していると信じており、定格よりも何倍も高い電流が流れているのは、 緊急、システムをシャットダウンします。 これを回避するには、ソフトスタートプロセスの追加モードを設定できる特別なマシンをインストールするか、ソフトスターターを使用するときに始動電流に対応する定格電流を持つマシンを選択してください。 2番目のケースでは、このマシンはモーターを過負荷から保護することはできませんが、ソフトスターター自体がこの機能を実行するため、モーター保護には影響しません。
要約しましょう。 開始をよりスムーズにする必要があるメカニズムが、この記事に記載されているすべての制限に適合し、利用可能なソフトスターターモデルによって提供される可能性があなたに合っている場合、あなたの選択はソフトスターターです. 周波数変換器 (電源変圧器の交換、発電機の出力の増加、ケーブルをより太いものに交換 - ケースを選択) を使用する場合と比較して、コストを大幅に節約できます。 何らかの理由でソフトスターターが適していない場合は、周波数変換器にもう一度注意を払ってください。これは、より高価ですが、はるかに機能的です。
Ruslan Khusainov、Ph.D.、Santerno CJSC (モスクワ) テクニカル ディレクター
広告

電気駆動 25.07.2017 安川電機株式会社は、窒化ガリウム半導体アンプを内蔵した世界初のサーボ モーターの作成を発表しました。 Σ-7 F サーボ モーターは、従来のドライブの半分のサイズであり、よりコンパクトで効率的なソリューションを可能にします。
このセクションは専用です 理論的基礎周波数調整とソフトスターターの動作原理。
周波数変換器の仕組み
周波数変換器- 電流の周波数を変えることで電気モーターの回転速度を制御できる装置。
周波数調整のプロセスを理解するには、まず電気工学コースの動作原理を覚えておく必要があります 非同期モーター.
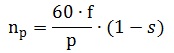
モーターシャフトの回転は、 磁場固定子巻線によって生成されます。 磁場の回転の同期周波数は、電源電圧 f の周波数に依存し、次の関係で表されます。
ここで、p は磁場の極のペアの数です。
負荷の作用下では、電気モーターの回転子の回転速度は、滑り s により、固定子の磁気モールの回転速度とは多少異なります。
![]()
したがって、電気モーターのローターの回転周波数は、供給電圧の周波数に依存します。
したがって、必要なモータ軸速度 np は、電源電圧周波数 f を変更することによって取得できます。 スリップは回転速度の変化によって増加しないため、調整プロセス中の電力損失は重要ではありません。
電気駆動装置を効率的に動作させ、電気モーターの主な特性の最大値を確保するには、周波数とともに供給電圧を変更する必要があります。
電圧変化関数は、負荷モーメントの性質に依存します。 一定の負荷トルク Mc = const の場合、固定子の電圧は周波数に比例して調整する必要があります。
ファンモードの場合:
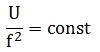
負荷トルクが速度に反比例する場合:
したがって、滑らかな周波数制御は、誘導電動機の固定子の周波数と電圧を同時に調整することによって提供されます。
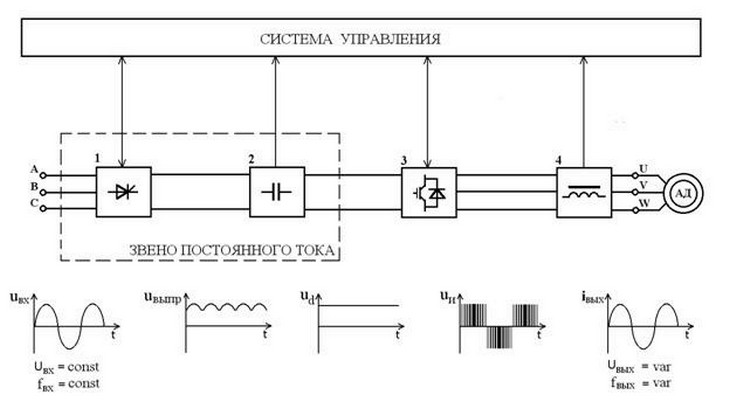
図 1. 周波数変換器のスキーム
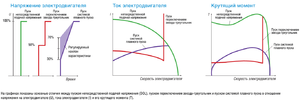
図上。 1. 低電圧周波数変換器の典型的なブロック図が示されています。 図の下部には、入力および出力の電圧と電流の各ブロック グラフが明確に示されています。
まず、幹線電圧 (U BX) が整流器 (1) の入力に供給されます。 さらに、整流電圧 (U REP) を平滑化するためにコンデンサ フィルタ (2) が使用されます。 そしたらもう 一定圧力(U d) はインバーター (3) の入力に供給され、そこで電流は DC から AC に変換され、それによって必要な電圧と周波数の出力信号が形成されます。 正弦波信号を得るために、平滑化フィルターが使用されます (4)
インバーターの動作原理をよりよく理解するために、図の周波数変換器の回路図を検討してください。 2
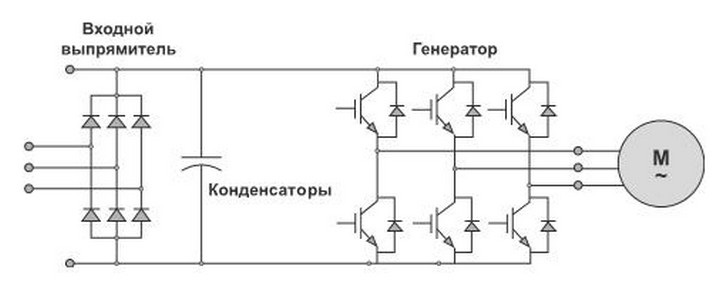
米。 2- 回路図低電圧周波数変換器
基本的に、インバータはパルス幅変調 (PWM) 方式を使用します。 この方法の原理は、ジェネレータキーを交互にオン/オフして、さまざまな持続時間のパルスを形成することです (図 3)。 モーターのインダクタンスまたは追加の平滑化フィルターの使用により、正弦波信号が得られます。
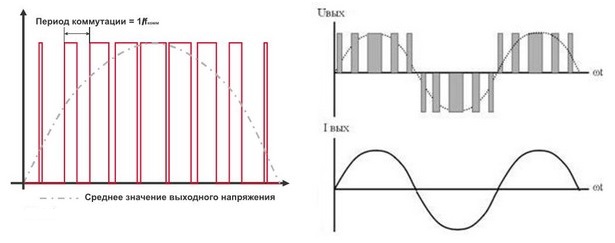
米。 3.周波数インバータ出力
したがって、インバータ スイッチのオン/オフ プロセスを制御することで、目的の周波数の出力信号を生成できるため、駆動速度を変更することでメカニズムの技術的パラメータを制御できます。
ソフトスターターの理論と動作原理
電気モーターの始動中に発生する過渡プロセスの特性により、巻線電流は電気モーターの定格電流の6〜8倍に達し、そのシャフトのトルクは150〜200%に達します 公称値. その結果、エンジンの機械部分が損傷するリスクが高まり、供給電圧の低下にもつながります。
これらの問題を実際に解決するには、 電気モーター用ソフトスターター、現在の負荷を徐々に増加させます。
現在の負荷を軽減することに加えて、ソフト スターターは次のことを可能にします。
- モーター巻線の加熱を減らします。
- 起動時の電圧降下を減らします。
- 設定された時間にブレーキをかけ、その後エンジンを始動します。
- ポンプ駆動の一部として動作する場合、圧力パイプラインの水撃を減らします。
- 電磁干渉を減らします。
- 欠相、過電圧、ジャミングなどの場合に電気モーターを包括的に保護します。
- システム全体の信頼性と耐久性を高めます。
SCPの動作原理
ソフトスターターの典型的な図を図 1 に示します。 1
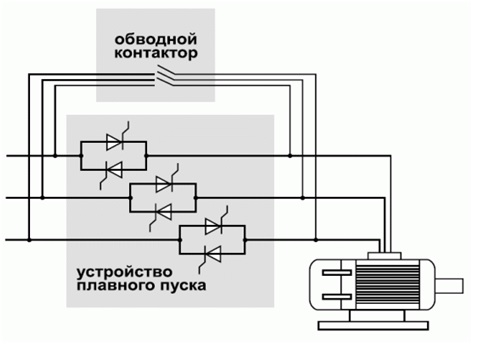
米。 1. ソフトスターターの模式図
サイリスタの開き角を変えることにより、ソフトスタータの出力電圧が調整されます。 サイリスタの開き角が大きいほど、電気モーターに供給される出力電圧の値が大きくなります。
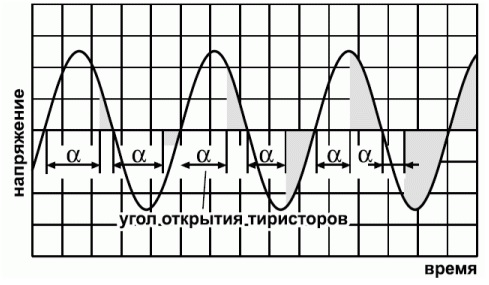
米。 2.ソフトスターターの出力電圧の形成
誘導電動機のトルクの大きさは電圧の2乗に比例することを考えると、電圧が下がるとモーター軸のトルクの大きさが減少します。 この方法を使用すると、電気モーターの始動電流は 2 ... 4 I NOM の値に減少しますが、加速時間はわずかに増加します。 電圧の低下に伴う非同期電動機の機械的特性の視覚的な変化を図1に示します。 3
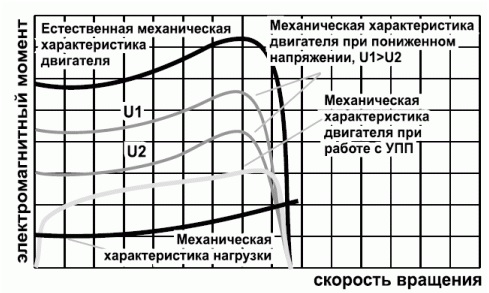
図 3. エンジンの機械的特性
電気モーターのソフトスタート中の電流負荷の減少は、図に明確に示されています。 四。
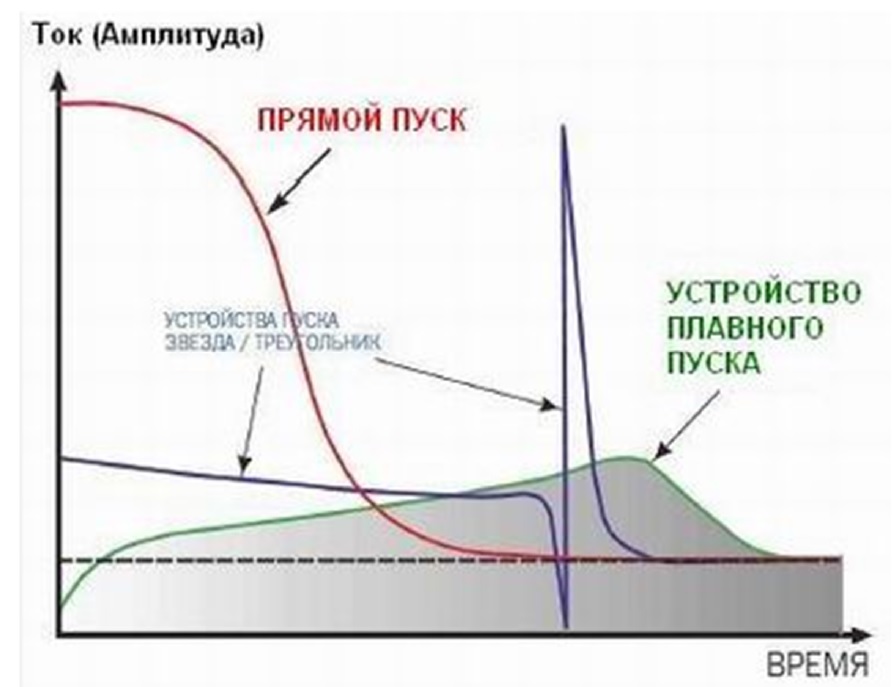
米。 4. 誘導電動機のソフトスタート図を示します
図上。 1. 典型的なソフトスターター回路が示されていますが、実際のソフトスターター回路は主にその動作条件に依存することに注意してください。 たとえば、家庭用工具と産業用クラッシャー駆動モーターには、異なるソフトスターターが必要です。 最も重要なパラメーターソフトスターターの動作モードを決定するのは、起動時間と最大過電流です。
これらのパラメータに応じて、ソフトスターターの次の動作モードが区別されます。
- 普通: 開始 10 ~ 20 秒、開始時の電流は公称 3.5 I 以下です。
- 重い: 起動約 30 秒、起動時の電流は 4.5 I nom を超えない
- 超重い: 無制限の加速時間、高慣性システム、範囲 5.5 ~ 8 I nom の始動電流
ソフトスターターは、次の主なグループに分類できます。
1. 始動トルクコントローラ
このタイプのデバイスは 1 つのフェーズのみを制御します 三相モーター. 単相制御により、モーターモーターの始動トルクを下げることができますが、同時に始動電流の減少はわずかです。 このタイプのデバイスは、起動時の電流負荷を軽減したり、高慣性負荷を起動したりするために使用することはできません。 ただし、単相非同期モーターを備えたシステムでのアプリケーションが見つかりました。
2. 開ループ電圧レギュレータ
このタイプのデバイスは、次の原則に従って動作します。ユーザーは、初期電圧の値と公称値への上昇時間を設定します。 フィードバックのない電圧レギュレータは、電気モーターの 2 相と 3 相の両方を制御できます。 このようなレギュレータは、起動プロセス中に電圧を下げることにより、起動電流を減らします。
3. ボルテージレギュレータ フィードバック
このタイプのソフトスターターは、上記のデバイスのより高度なモデルです。 フィードバックがあると、電圧を上げるプロセスを制御し、電気モーターを始動する最適なモードを実現できます。 現在の負荷に関するデータにより、過負荷、位相の不均衡などに対する電気モーターの包括的な保護を構成することもできます。
4.フィードバック付き電流レギュレータ
クローズド ループ電流コントローラーは、最も高度なソフト スターターです。 動作原理は、電圧ではなく電流の直接調整に基づいています。 これにより、電気モーターの始動を最も正確に制御でき、ソフトスターターのセットアップとプログラミングも容易になります。
すでに完全に機能しているデバイスやメカニズムの再装備に負担をかけ、お金と時間を費やしたいのは誰ですか? 練習が示すように - 多く。 人生のすべての人が強力な電気モーターを搭載した産業機器に遭遇するわけではありませんが、日常生活ではそれほど貪欲で強力な電気モーターではありませんが、常に遭遇します。 確かに、みんなエレベーターを使っていました。
事実、事実上すべての電気モーターは、ローターの始動または停止の瞬間に大きな負荷がかかります。 エンジンとそれが駆動する機器が強力になればなるほど、それを実行するためのコストが高くなります。
おそらく、始動時にエンジンにかかる最も重要な負荷は、短期間ではありますが、ユニットの定格動作電流の倍数です。 数秒の操作の後、電気モーターが公称速度に達すると、モーターが消費する電流も通常のレベルに戻ります。 必要な電源を確保するために 電気機器と導電線の容量を増やす必要がありますそれが彼らの価格を押し上げます。
強力な電気モーターが起動すると、その消費量が多いため、供給電圧の「ドローダウン」が発生し、同じラインから電力を供給されている機器の誤動作や故障につながる可能性があります。 また、電源装置の寿命が短くなります。
エンジンが燃え尽きたり、重度の過熱を引き起こした緊急事態が発生した場合、 変圧器鋼の特性が変化する可能性があります修理後、エンジンは最大 30% の出力を失うことになります。 このような状況下では、それ以上の運用にはもはや適さず、交換が必要であり、これも安価ではありません。
ソフトスタートとは何ですか?
すべてが正しいように見え、機器はそのために設計されています。 しかし、必ず「しかし」があります。 私たちの場合、いくつかあります:
- 電気モーターの始動時に、供給電流が定格の4.5倍から5倍を超える可能性があり、これにより巻線が大幅に加熱され、これはあまり良くありません。
- 直接接続でエンジンを始動すると、主に同じ巻線の密度に影響を与えるジャークが発生し、動作中の導体の摩擦が増加し、絶縁の破壊が加速され、時間の経過とともにターン間短絡が発生する可能性があります。
- 前述のジャークと振動は被駆動ユニット全体に伝達されます。 全然健康じゃないから 可動部分に損傷を与える可能性があります: システム 歯車、ドライブ ベルト、コンベヤー ベルト、またはぴくぴく動くエレベーターに乗っている自分を想像してみてください。 ポンプとファンの場合、これはタービンとブレードの変形と破壊のリスクです。
- 生産ラインにある可能性のある製品を忘れないでください。 このような衝撃により、落下、崩れ、破損する可能性があります。
- さて、おそらく注目に値する最後のポイントは、そのような機器の運用コストです。 頻繁に発生する重要な負荷に関連する高価な修理だけでなく、目に見える量の非効率的に消費された電力についても話しています。
上記の操作上の問題はすべて、強力で扱いにくいシステムにのみ固有のものであるように思われます。 産業機器、しかし、そうではありません。 これはすべて、平均的な素人にとって頭痛の種になる可能性があります。 まず第一に、これは電動工具に当てはまります。
電動ジグソー、ドリル、グラインダーなどのようなユニットの使用の詳細には、比較的短い期間内に複数の開始および停止サイクルが含まれます。 この動作モードは、同じ程度に、耐久性とエネルギー消費、および産業用の対応物に影響を与えます。 ただし忘れてはいけないのがシステム ソフトスタート エンジン速度を制御できないまたはその方向を反転します。 また、始動トルクを上げたり、モーターの回転子の回転を開始するのに必要な電流以下に電流を減らしたりすることもできません。
電気モーター用ソフトスタートシステムのオプション
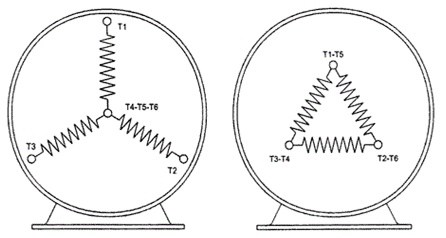
スターデルタシステム
 最も広く使用されている産業用始動システムの 1 つ 誘導電動機. その主な利点は単純さです。 スターシステムの巻線が切り替わるとエンジンが始動し、その後、公称速度が設定されると、自動的にデルタスイッチングに切り替わります。 こういうスタート ほぼ 3 分の 1 低い電流を達成することができます電気モーターの直接始動よりも。
最も広く使用されている産業用始動システムの 1 つ 誘導電動機. その主な利点は単純さです。 スターシステムの巻線が切り替わるとエンジンが始動し、その後、公称速度が設定されると、自動的にデルタスイッチングに切り替わります。 こういうスタート ほぼ 3 分の 1 低い電流を達成することができます電気モーターの直接始動よりも。
ただし、この方法は回転慣性が小さい機構には適していません。 これらには、たとえば、タービンのサイズと重量が小さいため、ファンや小型ポンプが含まれます。 「スター」から「デルタ」構成への移行時に、速度が急激に低下するか、完全に停止します。 その結果、切り替え後、電気モーターは本質的に再起動します。 つまり、最終的には、エンジン リソースの節約を達成するだけでなく、ほとんどの場合、電力を超過する可能性があります。
電子モーターソフトスターター
 制御回路に含まれるトライアックにより、エンジンのソフトスタートが可能です。 このような包含には、単相、二相、三相の 3 つのスキームがあります。 それらはそれぞれ、その機能と最終的なコストが異なります。
制御回路に含まれるトライアックにより、エンジンのソフトスタートが可能です。 このような包含には、単相、二相、三相の 3 つのスキームがあります。 それらはそれぞれ、その機能と最終的なコストが異なります。
これらのスキームは通常 始動電流を減らすことができます公称 2 つまたは 3 つまで。 さらに、前述のスターデルタシステムに固有の大幅な加熱を減らすことができ、電気モーターの耐用年数の延長に貢献します。 エンジンの始動は電圧を下げることによって制御されるため、ローターの加速は他のスキームのように突然ではなくスムーズに実行されます。
一般に、いくつかの重要なタスクがエンジン ソフト スタート システムに割り当てられます。
- 主なもの - 始動電流を公称3または4に下げる;
- 適切な容量と配線がある場合のモーター供給電圧の低下。
- 始動および制動パラメータの改善;
- 現在の過負荷に対するネットワークの緊急保護。
単相始動回路
このスキームは、11キロワット以下の電力で電気モーターを始動するように設計されています。 このオプションは、起動時の衝撃を和らげる必要があり、制動、ソフトスタート、および起動電流の低下が問題にならない場合に使用されます。 まず第一に、そのようなスキームで後者を組織することは不可能であるためです。 しかし、トライアックを含む半導体の生産が安価になったため、製造が中止され、めったに見られなくなりました。
二相始動回路
このようなスキームは、最大250ワットの電力でエンジンを調整および始動するように設計されています。 このようなソフトスタートシステム バイパスコンタクタを装備する場合もあるただし、デバイスのコストを削減するために、これは過熱につながる可能性のあるフェーズの非対称電源の問題を解決しません。
三相始動回路
この回路は、電気モーター用の最も信頼性が高く用途の広いソフトスタートシステムです。 このようなデバイスによって制御されるモーターの最大出力は、使用されるトライアックの最大熱および電気耐久性によってのみ制限されます。 彼の 汎用性により、多くの機能を実装できますダイナミック ブレーキ、フライバック、磁場、電流制限バランスなど。
前述の回路の最後の重要な要素は、前述のバイパス コンタクタです。 彼 電気モーターのソフトスタートシステムの正しい熱体制を確保することができます、エンジンが通常の動作速度に達した後、過熱を防ぎます。
上記の特性に加えて、今日存在する電気モーターのソフトスターターは、さまざまなコントローラーおよび自動化システムとの共同操作用に設計されています。 それらは、オペレーターまたはグローバル制御システムのコマンドでオンにすることができます。 このような状況では、負荷の切り替え時に、自動化の誤動作につながる可能性のある干渉が発生する可能性があるため、保護システムに注意する価値があります。 ソフトスタート回路を使用すると、その影響を大幅に軽減できます。