同期 DC モーター。 石油とガスの大百科事典。 同期リニア ステッピング モーター
どちらかに 電気器具機能するには、特別な駆動機構が必要です。 そのようなメカニズムの 1 つがステッピング モーターです。 この資料では、それが何であるか、その操作の原則、およびそれがどのカテゴリに分割されているかを学びます。
ステッピング モーターは、ユニポーラまたはバイポーラにすることができます。 これは、完全な 1 回転をいくつかの同一のステップに分割できる電気ブラシレス DC モーターです。 次の詳細が含まれます。
理想的な電流発生器 電流発生器は、矢印の方向が電流の方向を示すこの記号で表すことができます: 理想的な発生器。 特定のコンポーネント 電気力発電機と呼ばれます。 それらは、電気現象と異なる性質の現象との間の相互作用の本拠地であり、他の形態のエネルギーからの変換によって電気の生成を実現します。 それらはアクティブな双極であり、他の電気部品への接続を可能にする端子を持ち、電流対電流の 2 つのカテゴリに分類されます。

ステッピングモーターは、主に次の目的で使用されます。
- フライス盤の仕事;
- 研削盤作業;
- さまざまな家電製品の動作を保証します。
- 工業用機械手段の仕事;
- 輸送を提供します。
理想的な電圧発生器 電圧発生器は、次の記号のいずれかで示すことができます。 現在の発電機の表現。 ジェネレーターにはどのような種類がありますか? 大きい 風力発電所電力網に接続された数百の個別の風力タービンで構成されています。 洋上風力発電はより安定しており、より多くのエネルギーを提供し、視覚的な影響は少ないですが、建設コストと メンテナンス大幅に高くなります。 小規模な陸上風力発電所は、孤立した場所に電力を供給します。
駆動原理
 このドライブの動作原理は次のとおりです。 電圧が端子に印加されると、ステッピング モーター自体のブラシが絶えず動き始めます。 エンジン アイドルムーブ固有の特性があります: それ 入力パルスを変換します、取り付けられたドライブシャフトの所定の位置に、主に長方形の向きを持っています。
このドライブの動作原理は次のとおりです。 電圧が端子に印加されると、ステッピング モーター自体のブラシが絶えず動き始めます。 エンジン アイドルムーブ固有の特性があります: それ 入力パルスを変換します、取り付けられたドライブシャフトの所定の位置に、主に長方形の向きを持っています。
電力会社は、家庭用の小型風力タービンによって生成された余剰電力をますます購入しています。 風力発電は代替化石燃料エネルギーであり、豊富で再生可能で、グリーン経済によってサポートされ、広く普及し、クリーンで、運用中に温室効果ガスを排出せず、過度に高い電力を必要とします。 土地区画. 環境は一般に、 環境. 風の刃であるこれらの優れた巨人は常に動き回っており、魅了することはできず、好奇心旺盛です。
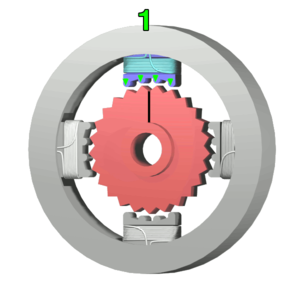
入ってくるインパルスのそれぞれが、特定の角度でシャフトを動かすことができます。 このようなギアボックスを備えたデバイスは、歯車の形をした中央の鉄片の周りにいくつかの歯車電磁石が配置されている場合、最大の効率を発揮します。 外部制御回路が電磁石に通電します。 モーターシャフトを回転させる必要がある場合、エネルギーが加えられた電磁石がホイールの歯を引き付けます。 それらが電磁石と整列すると、モーターの後続の磁気部分に対してオフセットされます。
ステッピングモーターの種類
それで、疑うために、それらがどのように機能するかを説明します。 まず、風力タービンには垂直軸と水平軸の 2 種類があります。 現代の風力発電所で一般的に見られるタービンは、タワーと 3 つの水平軸ブレードで構成されており、そこから名前が付けられています。 あまり一般的ではない垂直軸タービンは、前者よりも効率が低くなりますが、風をあらゆる方向に向けることができ、微風でも素早く回転できます。
同期リニア ステッピング モーター
それらは、垂直ブレードが周囲にある中央タワーで構成されています。 電気モーター 交流電流交流で動く電気モーターです。 固定子巻線のみ これらのモーターは、このタイプで最もよく使用される電源の 1 つであり、いくつかの側面に分けられます。 三相モーター.
最初の電磁石がオフになり、次に2番目の電磁石がオンになり、その後、前のホイールと整列しながらギアが回転し始めます。 それで この動作が繰り返されます。必要回数。 これらの各回転は一定のステップと呼ばれますが、ステッピング モーターの回転速度は、その回転を完了するのに必要なステップ数をカウントすることによって計算できます。
三相誘導電動機 非同期三相電動機の固定子磁石 三相電動機は、120° の角度で時間と空間の位相を合わせた三相電流システムを起動する必要がある電気モーターの一種です。 非同期モーターはACモーターで、 角速度その回転子は、非同期である固定子巻線によって生成される磁場の回転速度よりも遅くなります。 誘導電動機は、次のような動作原理から誘導電動機とも呼ばれます。
ステッピングモーターの動作を制御するために、特別なドライバーが使用されます。 これは、ドライブをセットアップして機械を操作したり、それを使用して風力発電機を始動したりする場合に必要です。
ステッピングモーターの種類
ステッピングモーターは、次のタイプに分類されます。
ステッピングモーター接続の特長
誘導電動機は、主電源に接続されているかどうかに応じて、コンデンサを使用するかどうかに関係なくオルタネーターとして使用できます。 性能を犠牲にしても同期モーターの使いやすさが優先される状況で、小電力に使用されます。
単相モーターは、電気相と中性線を備えた電線を使用する必要があるタイプの電気モーターです。これらのモーターは、通常、非電気特性を考慮して、さまざまな用途と設計を持つことができます。 二相モーターこれらのモーターを駆動するために使用され、コンデンサーを使用して第 2 フェーズを受け取ります。
- 永久磁石付き;
- 同期ハイブリッド ドライブ。
- 可変モーター。
それらはすべて、仕事の原則を含め、互いに多少異なります。
たとえば、永久磁石ドライブには、ローターに特殊な磁気部品が装備されています。 そのような エンジンは引力または反発の原理で動作します電磁石に基づくモーターの固定子と回転子。
同期モーターは、同じ周波数で回転する固定子磁場と同期した磁場によって誘導される磁場を特徴とするいくつかのアプリケーションを考えると、あまり使用されない単相モーターです。 巻線に電流が流れると、回転子の周囲に磁界が発生します。 ローターの左側の部分は、左側の磁石によって捨てられ、右側によって引き寄せられます。 同じく右下。 カップルは回転を生成します。 アーマチュアが水平に整列すると、スイッチは巻線を流れる電流の方向を反転させ、磁場も変化させます。
可変エンジンには従来の鉄製ローターがあり、その動作は基本原理に基づいて構築されています。 最小のギャップで最小レベルの反発が許容される場合、ローターのポイントはステーターの極に引き付けられます。
しかし、ハイブリッドドライブは両方の動作原理を組み合わせることができ、ステッピングモーターの最も高価なモデルと見なされています。
リニアモーターは、回転子と固定子が円形ではなく「回転」し、トルクを生成する代わりに直線的な力を生成する電気モーターです。 リニア モーターには多くの設計ソリューションがあり、低加速と高加速の 2 つのカテゴリに分けることができます。
主なエンジン仕様
電気モーターのプレゼンテーション。 電気自動車は、ニーズや用途に応じて異なる場合があります。 設計上の特徴 1、2、3、4、またはそれ以上の車輪で。 最も一般的な車種は何ですか? 電動バイク、ゼロバイク 電動スクーターまたは電動バイクは、二輪車または三輪車で、 電気エンジン動きのために。
二相ステッピングモーター
 二相モーターは非常にシンプルで、特別な経験がなくても取り付けられます。 自分で組み立てた場合でも、既製品を購入した場合でも、2 種類のコイル巻線があります。
二相モーターは非常にシンプルで、特別な経験がなくても取り付けられます。 自分で組み立てた場合でも、既製品を購入した場合でも、2 種類のコイル巻線があります。
この記事では、多相非同期モーター、モーターのランダムな過電流と短期間のトルク過負荷を扱います。 直流および多相同期モーター。 回転機械の現在の過負荷容量は、これらの機械を制御および保護装置と一致させるために示されています。 巻線機の熱効果は、時間と 2 番目の電流電力の結果としてほぼ変化します。 定格電流を超える電流は温度を上昇させます。 特に明記されていない限り、マシンはその寿命中に電流の過負荷で動作するのはほんの数時間だけであると想定できます。
- 単極構造;
- バイポーラ。
ステッピング モーターに 1 つの巻線があり、中央の磁気タップが各相に影響を与える場合、それはユニポーラ ドライブです。 磁場の正しい方向を確保するために、各巻線セクションをオンにする必要があります。 このドライブでは、追加のスイッチングを必要とせずに磁極が機能できるため、 電流の方向と回路の切り替えは非常に簡単です、各巻線に 1 つのトランジスタを使用します。 次のフェーズ変更が考慮されます。
AC マシンをモーターとしてではなくジェネレーターとして使用する場合、過負荷は合意の問題である必要があります。 モーター 定格電力が最大 315 kW、定格電圧が最大 1 kV の多相モーターは、少なくとも 2 分間、定格電流の 1.5 倍に等しい電流に耐える必要があります。 定格電力が 315 kW を超える多相モータおよびすべての 単相モーター偶発的な過電流はありません。
モーターの瞬間的なねじり過負荷
スイッチは、次の条件の適切な組み合わせの下で、定格電流の 1.5 倍に 60 秒間耐える必要があります。 多相 非同期モーター DC モーター モーターは、負荷の種類や設計に関係なく、定格トルクの 60% のトルク過負荷の停止や突然の変化なしに、電圧と周波数を維持した状態で 15 秒間耐えなければなりません。 公称値. DC モーターの場合、トルクは過電流で表す必要があります。
- 相ごとに 3 本のワイヤ。
- 出力ごとに 6 つ。
ドライブ モーター マイクロコントローラーを使用して、特定のシーケンスでトランジスターをアクティブにすることができます。
また、接続ワイヤをドライブの永久磁石と一緒に接触させることで、巻線を接続することもできます。 コイル端子を接続する際、シャフトが回しにくくなります。 コイルエンドとコモン線間の抵抗 抵抗の半分に等しいコイルとワイヤーエンド。 こんな感じなので 共通線それは持っています 素晴らしい長さコイルを接続するために使用される半分の部分よりも。
高トルクを必要とする特別な用途向けのモーターは、適合させる必要があります。 4.5倍未満の始動電流を達成するように特別に設計された非同期短絡モーターの場合 定格電流、トルクの過負荷は、最初の段落で指定された値の 60% 未満である場合がありますが、50% 未満ではありません。
可変速モーターや静的コンバーターによって駆動される非同期モーターなど、特殊な始動特性を持つ特殊なタイプの非同期モーターの場合、オーバートルク値を合意する必要があります。 特に指定のない限り、多相同期電動機は、負荷に関係なく、定格負荷に対応する値で励磁を維持しながら、同期を失うことなく、次の過負荷トルクに 15 秒間耐えなければなりません。
バイポーラ ステッピング モーターには 1 つの相巻線があり、磁極を使用して逆方向に電流が供給されます。 この場合の制御システムは、接続ブリッジを使用して複雑になります。 相ごとに 2 本のワイヤがありますが、それらは一般的ではありません。 ステッピング モーター信号を高周波で混合することにより、システムの摩擦効果を低減できます。
さらに、別のタイプのステッピング モーターは三相ですが、その範囲は狭すぎます。
- CNCフライス盤の操作中。
- スロットルバルブが使用されている一部の車両。
- 一部のブランドのドライブとプリンターで。
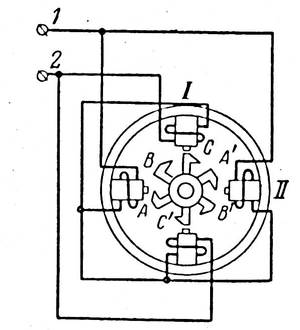
リアクティブステッピングモーター:機能と動作原理
 アクティブステッパードライブには大きな欠点があることに注意してください。これは大きなステップであり、数十度に達します。 対照的に、リアクティブ ステッピングモーターはローター周波数を下げることができます、これにより、ステップの角度が 1 度未満になります。
アクティブステッパードライブには大きな欠点があることに注意してください。これは大きなステップであり、数十度に達します。 対照的に、リアクティブ ステッピングモーターはローター周波数を下げることができます、これにより、ステップの角度が 1 度未満になります。
ジェットドライブの主な特徴は、歯がステーターポールに配置されていることです。 その同期モーメントは、ドライブの横軸と縦軸に沿った磁気抵抗の違いによって提供されます。
リアクティブ ステッピング モーターには、重要な欠点が 1 つあります。 同期トルクなし固定子巻線が消勢されている場合。
固定子の歯が分割の一部によって互いに向かって移動し、各パッケージの回転子が移動する場合、マルチパッケージ構造を使用して、アクティブまたはリアクティブのどちらに関係なく、エンジンの削減の程度を高めることができます。移動せず、それらの極の軸は同じです。 似ている 設計は作成に関して非常に複雑です完成品は安価ではなく、複雑なスイッチも必要になります。
現在までに、次のようなパラメーターが異なる膨大な数のさまざまなエンジン設計が販売されています。
- フェーズ数;
- 巻線配置タイプ;
- ローターの固定方法など
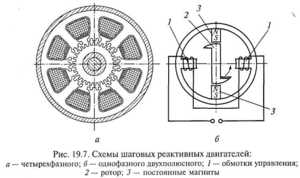
インダクタ ステッピング モーターでは、トルクは、固定子巻線によって生成される磁場と、ギャップの歯付き部分に配置された永久磁石との相互作用によって生成されます。
インダクタ モータの同期トルク自体はリアクティブであり、固定子巻線が発生します。一方、永久磁石は固定トルクを生成することができ、それによって回転子を所定の位置に保持します。 望ましい位置電流なし。
リアクティブステッピングモーターとは異なり、同様のステップを持つインダクターモーターは、同期トルクが大きく、より改善されています 仕様.
同期リニア ステッピング モーター
 企業内の一部の生産プロセスを自動化するために、平面内でオブジェクトを移動することが必要になる場合があります。 これをする 特別なコンバーターを使用する必要があります回転運動を並進運動に変換します。これは、キネマティクスを適用することによって実現されます。
企業内の一部の生産プロセスを自動化するために、平面内でオブジェクトを移動することが必要になる場合があります。 これをする 特別なコンバーターを使用する必要があります回転運動を並進運動に変換します。これは、キネマティクスを適用することによって実現されます。
リニア ステッピング モーターを使用すると、パルス コマンドを直接 直線運動、さまざまな電気駆動装置の運動学的スキームを大幅に簡素化します。
このドライブの固定子は、磁気的に柔らかいプレートの形で提示され、ワイヤは永久磁石の動作によって磁化されます。
固定子と可動部の歯分割は同じですが、 それらは半目盛りでシフトできます 1本のローターワイヤ内。 この場合、バイアス磁束とその磁気抵抗は、モーターの可動部分がどこにあるかには依存しません。
2 つの座標に従って平面内でオブジェクトを移動するには、2 座標型のエンジンが使用されます。
リニアモーターにも磁気エアサスペンションが使用されています。 磁気吸引力により、ローターはステーターに引き寄せられます。 さらに遠く 空気はノズルを通してローターの下に吹き込まれます圧縮された形で、その結果、ローターをステーターから反発させる力が現れます。 そのため、それらの間にエアクッションがあり、ローターは最小限のギャップでステーターにぶら下がっています。 これにより、ローターの動きに対する抵抗が最小限に抑えられ、高精度の位置決めが可能になります。
 ドライブは、制御巻線にパルス列が印加される角度の計算中にステップの損失がなければ、安定して動作することができます。 各ステップ中 ローターには自信のあるバランスがありますに関連する磁気誘導のベクトルに関して 磁場ステーター。
ドライブは、制御巻線にパルス列が印加される角度の計算中にステップの損失がなければ、安定して動作することができます。 各ステップ中 ローターには自信のあるバランスがありますに関連する磁気誘導のベクトルに関して 磁場ステーター。
各ステップを処理するモードは、ドライブ巻線に適用される制御パルスの数に対応する必要があり、同時に、次のパルスが到着するまでに、それに与えられた回転角度を計算する必要があります。 各ステップの開始時に、角モーター速度はゼロでなければなりません。
確立された値に対する角度駆動シャフトの振動は許容されます。 それらは、コーナーでの作業中にモーターシャフトによって蓄積される運動エネルギーの存在によって引き起こされます。 この場合、損失に変換できるエネルギー:
- 磁気;
- 機械的;
- 電気。
それらの値が大きいほど、ドライブが終了するまでの 1 つのステップを解決する移行プロセスが速くなります。
始動時に、回転子は固定子磁束より 1 ステップまたはそれ以上遅れる場合があり、その結果、回転子ステップ数と固定子磁束の間に不一致が生じます。
ステッピング モーターの主な特徴は次のとおりです。
- 究極の機械的特性;
- 選び出す。
制限特性は、制御パルスの周波数に対する最大可能同期トルクの依存性です。
また、ピックアップはこれらのパルスの周波数であり、処理中にステップが失われたり追加されたりする可能性を排除します。 選び出す 重要な指標と見なされるエンジンの移行モード。 同期トルク、ピッチの減少、直線的に変位または回転する粒子の慣性モーメント、および抵抗の静的モーメントとともに成長することができます。
ステッピングモーター接続の特長
 ワイヤの数と開始方法に応じて、1つまたは別のスキームに従ってステッパータイプのモーターを接続できます。
ワイヤの数と開始方法に応じて、1つまたは別のスキームに従ってステッパータイプのモーターを接続できます。
モーターには 4 ~ 8 本のワイヤを使用できます。 それらが4つしかない場合、エンジンの使用はバイポーラデバイスでのみ可能です。 2つしかない各相巻線には、2本のワイヤが装備されています。 有線ペアはメーターを使用して決定する必要があり、ドライバーは段階的に接続されます。
6 本のワイヤーを備えたモーターには、各巻線に 2 本のワイヤーと、それぞれに中央のタップが含まれています。 ユニポーラとバイポーラの両方のデバイスに接続できます。 スプリットドライブの場合 特別なデバイスを使用する必要があります。測定用。 ユニポーラ デバイスでは、ドライブは 6 本のワイヤすべてを使用して接続できます。ユニポーラ デバイスでは、各巻線の一端と中央に 1 つのタップで十分です。
5線式モーターは前のものと実質的に違いはありませんが、その中央端子は内側から1本のソリッドケーブルとして接続されており、ワイヤーの1つに1つの出力があります。 巻線を互いに分離しないでください。そうしないと、巻線が破損する可能性があります。 代わりに、ワイヤの中心を特定して他の導体に接続することをお勧めします。これが最も効率的な接続ソリューションになります。 あとは、本体を接続して動作確認。
主なエンジン仕様
 直流の一次巻線は 定格電圧. また、駆動トルクの初速は電流によって変化します。 高速で線形トルクを減少させる時間は、モーター回路とその巻線のインダクタンスによって異なります。 IP65 保護を備えた一部のブランドのモーターは、最も困難な条件で動作することができます。
直流の一次巻線は 定格電圧. また、駆動トルクの初速は電流によって変化します。 高速で線形トルクを減少させる時間は、モーター回路とその巻線のインダクタンスによって異なります。 IP65 保護を備えた一部のブランドのモーターは、最も困難な条件で動作することができます。
国内生産のステッピングモーターの既製品モデルを選ぶなら、 主な技術的特徴に注意を払う最も有名なモデル:
- ShD-1 - ステップ度は 15、4 段階、トルクは 40 Nt。
- DSh-0.04A - 度ステップ 22.5、4 段階、トルク 100 Nt;
- DSHI 200 - 度ステップ 1.8、4 段階、トルク 0.25 Nt;
- DSh-6 - ステップ度 - 18、4 段階、トルク 2300 Nt。
次のようなモデルもバイヤーに人気があります。
- 四相DShR-40;
- SM-200-0.22;
- エンコーダを使用した Purelogic の研究開発。
- NEMA 23;
- STH-39D1112;
- SP-57;
- 山陽電機SM28。
選択時 希望のエンジン、電力、電圧、トルクのパラメータを計算する必要があります。
ステッピング モーターの動作に関する問題の 1 つは、コントローラーがない場合のデバイスの制御です。 これに対処するには、次のことが必要です。 特別な論理接続ブロックを取る、適切なマイクロ回路がない場合にエンジンを制御するのに役立ちます。 ただし、特別なコントローラーを使用してステッピングモーターの動作を制御するのが最善です。
ロシアとウクライナの大都市でのステッパードライブの平均コスト
このデバイスのコストは、次のような指標に直接依存します。

ユニポーラ ステッピング モーターの平均コストは次のとおりです。
- モスクワ - 3000 米ドル;
- サンクトペテルブルク - 3500 米ドル;
- キエフ - 3500 米ドル;
- ハリコフ - 4000 c.u.
そこで、ステッピングモーターとは何か、それがどのような原理で動作するか、どのカテゴリに分類され、どのような特性と異なるかについて説明しました。 これにより、このデバイスをいつ購入する必要があるかを簡単に選択できるようになることを願っています。
3ページ
VNIIPTmash 牽引ホイールセットの主な寸法と特性を表に示します。 6.2. 4極モーターを電磁ブレーキ内蔵のフランジ付き2極モーターに置き換えることで、トロリの速度を2倍に上げることができ、極数可変の電動モーターを使用すると、2段階の運転速度が得られます。取得できる。
| 地下クラスターのスキーム。 |
水中スクリュー電動ポンプの設置では、シャフト速度1500 rpm(同期)の4極電動モーターが使用され、水中遠心電動ポンプの設置では、シャフト速度3000 rpmの2極電動モーターが使用されます。
これらのコンプレッサーはすべて単気筒で、シリンダーの直径は 36 mm、ピストン コードは 19 mm、ピストンで表される容積は 0 87 dm3 - s です。 三相二極電気モーター AVK2 - 0 7 が使用されます。 AEC2 - 0.7 および AEC2 - 1 (それぞれ)、その特性を表に示します。 V-14。
EPUにはピックアップを自動制御する機構があります。 EPU は、非同期単相 2 極電気モーターから動作します。コンデンサーの始動を伴います。ローター速度は 2800 rpm です。 バックグラウンドレベルを下げるために、電気モーターはパーマロイスクリーンで囲まれています。
たとえば、2 極の電気モーターの固定子に 12 のスロットがある場合、極ごとに 6 つのスロットがあり、これらの 6 つのスロットは、この極を形成する 3 相すべてのコイルの側面に対応する必要があります。 したがって、巻線回路を設計および作成する場合、極および位相あたりのスロット数は特徴的で決定的な値です。
保護され密閉された換気電動モーター 同じ値回転力と回転速度は同じ取り付け寸法です。 これの例外 原則閉鎖型換気設計の 2 極電気モーターであり、電力は保護設計の電気モーターよりも 1 段階低くなります。 同時に、14、28、55、および 100 kW の出力で 6、7、8、および 9 寸法のバイポーラ電気モーター A および AO の場合、取り付け寸法は同じです。
DCモーターの計算はACモーターよりも単純で明確であるため、DCモーターから計算を開始します。 これは、すべての計算値の詳細な説明です。これは、AC モーターで見られます。 計算は、直列励磁の 2 極電動機に対して行われます。
外見上は従来のESPと変わらないスクリュー電動ポンプも使用されています。 この場合、井戸から地表への油の供給は遠心力ではなく、スクリュー(単軸)ポンプによって行われます。 このようなポンプでは、シャフト速度1500 rpmの4極同期電気モーターが使用され、従来のESPでは、シャフト速度3000 rpmの2極電気モーターが使用されます。
ブラシは整流子の表面に押し付ける必要があります。 これがブラシホルダーの目的です。 ブラシの上に細いワイヤーで作られた渦巻きばねが配置されています。 キャップ 5 がチューブの上部にねじ込まれ、ブラシとスプリングがチューブから落ちるのを防ぎます。 ブラシホルダーは、モーターハウジングの壁に押し込まれています。 2 極モーターでは、ブラシ付きの 2 つのブラシ ホルダーが必要です。 ブラシが電気モーターの磁気システムの極の間にあるように、それらを取り付ける必要があります。 ブラシ ホルダーは、互いに、またモーター ハウジングから分離する必要があります。 電流を流すには、絶縁導体をブラシ ホルダーにねじ込むか、はんだ付けする必要があります。