光学式直線変位センサの威厳。 動きセンサー。 コミュニケーションとコミュニケーション
テーマ: 線形および角度変位センサーの動作に関する研究
目標: 直線変位センサ、角変位センサの動作原理、設計、装置の研究。
タスク:
1. センサーを構築するための動作原理とスキームを検討する 直線運動: 容量性; 光学; 誘導; 渦電流; 超音波; 磁気抵抗; 電位差。
最大限の汎用性と使いやすさ
外部取り付け設計のリニア位置センサー。 磁歪リニア位置センサー保証 高効率コンクリートブロックの製造における品質。 コンクリート ブロック マシンでは、磁歪式リニア位置センサが加えられた荷重の軸方向位置を同時に確実に測定し、持ち上げ動作を生成します。
グローバルスタンダードの油圧シリンダーフィードバック
ロッド線形変位センサー。 
これらは、鉄鋼加工、製材、タイヤ製造などの産業で使用される油圧シリンダーでの使用に非常に適しています。 あらゆる制御システムに適応できるように、数多くの電気インターフェースオプションが利用可能です。
2.角変位センサーを構築するための動作原理とスキームを検討してください。 磁気; 磁気抵抗。
3. 仕事について結論を出す。
理論上の部分:
変位センサーは、物体の直線的または角度的な機械的変位の大きさを決定するように設計されたデバイスです。
タフで要求の厳しい条件向けのシリンダー フィードバック システム
堅牢なリニア位置センサー。 
非接触の動作原理により摩耗が防止され、ほぼ無限の耐用年数が保証されます。 堅牢なリニアエンコーダがピストンの位置を正確に知らせ、スムーズな穴あけを保証します。
ミッションクリティカルなアプリケーション向けの完全冗長設計

冗長リニアエンコーダを使用すると、最大 3 つの独立した測定セクションと 3 つの独立した電子モジュールが 1 つのロッドにコンパクトに統合されます。
静電容量式変位センサー
このタイプのセンサの動作は、コンデンサの静電容量とその幾何学的構成との関係に基づいています。 最も単純なケースでは、外部の物理的影響によるプレート間の距離の変化について話しています (図 1)。 コンデンサの静電容量はプレート間のギャップのサイズに反比例するため、他の既知のパラメータで静電容量を決定することで、プレート間の距離を判断することができます。 静電容量の変化はさまざまな方法で修正できますが (たとえば、そのインピーダンスを測定することによって)、いずれの場合も、コンデンサを電気回路に含める必要があります。
世界的な防爆認証を取得したロッドリニア位置トランスデューサ
危険場所用のリニア位置センサー。 
逆止弁と遮断弁は、石油とガスの生産、製油所、石油化学プラントの多くの分野で使用されています。
高精度の充填レベル測定により、厳格な衛生基準が保証されます

高い表面品質と丸みを帯びたエッジにより、最高の国際衛生基準を満たし、たとえば食品業界の厳しい要件を簡単に実装できます。
図 1. ギャップが変化する容量性線形変位センサー。
出力パラメータが 電気容量は、誘電体が移動するコンデンサを含む回路です (図 2)。 コンデンサのプレート間で誘電体プレートを移動すると、静電容量も変化します。 プレートは対象物体に機械的に接続されてもよく、この場合、静電容量の変化は物体の動きを示す。 さらに、物体自体が誘電体の特性を持ち、適切な寸法を持っている場合は、コンデンサの誘電体媒体として直接使用できます。
工業用測定システム
から作られています ステンレス鋼の研磨された表面と丸みを帯びたエッジ。 オープンビーム 長方形プロファイル 円筒プロファイル。 シュラウド カーソル スプリング リターンなしのフロント ステム スプリング リターン付きのフロント サイド ステム スプリング リターンなしのフロントおよびリア片面ステム スプリング リターン付きのフロントおよびリア片面ステム
それぞれの測定タスクに最適な測定原理は、条件によって異なります。 環境、ダイナミクス、指定された精度、そしてもちろん、測定される距離。 磁歪式距離センサでは、動作時間が測定された後、電子信号処理が常に統合されます。 印刷、テキスタイル、医療技術における当社の豊富な経験により、迅速にお金を見つけて節約することができます。 省スペース、信頼性、精度に最適なタイプを豊富に取り揃えています。

図 2. 誘電体が移動する容量性線形変位センサー。
光学式変位センサー
さまざまな光学効果に基づく変位センサー回路には多くのバリエーションがあります。 おそらく最も一般的なのは光学三角測量方式です。実際、位置センサーは、対象物までの距離を決定し、物体の表面によって散乱された放射を固定し、反射角を決定する距離計です。長さ d - オブジェクトまでの距離を決定することができます (図 3)。 ほとんどの光学センサーの重要な利点は、非接触測定を実行できることです。さらに、このようなセンサーは通常、非常に正確で高速です。
この 1 つのページで、静電容量センサーの操作、アプリケーション、理論、およびリソースの概要を説明します。 より詳細な情報へのリンクも提供されます。 コンテストの引用期間は 4 週間で、製品の納品には 8 週間かかりました。 高性能静電容量式センサーのナノメートル分解能は、今日のナノテクノロジーの世界に欠かせないものになっています。 また、非導電性ターゲットの位置やその他の特性を測定するためにも使用できます。
磁歪センサに勝る利点
静電容量センサーの使用 電気特性測定のための「容量」。 静電容量は、妥当な距離内にある任意の 2 つの導電面間に存在する特性です。 表面間の距離を変えると静電容量が変わります。 静電容量センサーを使用してターゲットの位置を変更できるのは、この静電容量の変化です。 高性能変位センサーは小さな感知面を使用するため、ターゲットの近くに配置されます。
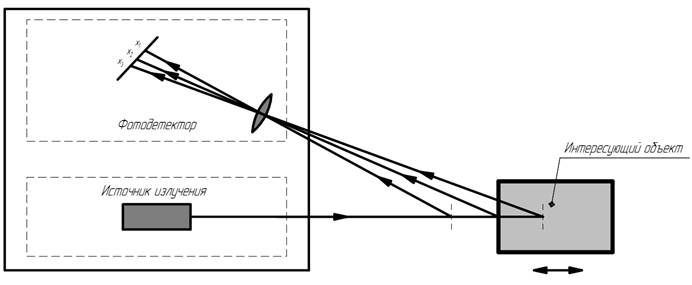
図 3. 光学三角測量方式に基づく光学式変位センサー。
小さな変位と振動のパラメータを登録して決定するように設計された光センサの別の実装では、光源と光検出器だけでなく、二重格子構造が使用されます (図 4)。 1 つの格子は固定されており、2 つ目は可動であり、対象物に機械的に固定するか、何らかの方法でその動きをセンサーに伝達することができます。 可動格子の小さな変位は、光検出器によって記録される光強度の変化につながり、格子周期の減少に伴い、センサーの精度は向上しますが、そのダイナミックレンジは狭くなります。
高性能静電容量式タッチシステム。 「高性能」静電容量式リニア エンコーダと低コストの静電容量式リニア エンコーダを区別することが重要です。 安価な近接スイッチやエレベータのタッチ スイッチで使用されるような単純な静電容量センサーは、 シンプルなデバイス最も基本的な形では、高校の電子工学クラスで開発できます。 近接センサーは自動化アプリケーションで非常に有用であり、市販されている多くのモデルはよくできていますが、高精度計測アプリケーションには適していません。

図 4.回折格子に基づく光学式変位センサー。
追加機能アプリケーションには、光の偏光を考慮した光学センサーがあります。 このようなセンサーでは、表面の反射特性に従ってオブジェクトを選択するためのアルゴリズムを実装できます。 センサーは、反射率の高いオブジェクトのみに「注意を払う」ことができ、他のオブジェクトは無視されます。 もちろん、分極に対する感度は、そのようなデバイスのコストに悪影響を及ぼします。
センサーには3つのクラスがあります
対照的に、精密測定および計測測定で使用する容量性変位センサーは、複雑な電子設計を使用して複雑な数学的アルゴリズムを実行します。 低コストのセンサーとは異なり、これらの高性能センサーは、温度に対して線形で安定した出力を持ち、静電容量の非常に小さな変化を解決できるため、1 ナノメートル未満の高分解能測定が可能です。
光学、レーザー、渦電流、誘導などの他の非接触センサー技術と比較して、高性能静電容量センサーには特定の利点があります。 材料の変化に影響されない: 静電容量式センサーは、すべての導体に等しく反応します。
- サブメートルの解像度を含む、より高い解像度。
- レーザー干渉計より安価で、はるかに小型です。
誘導変位センサー
このタイプのセンサの1つの構成では、感知要素は可動コア変圧器である。 外部物体の動きによってコアが動き、トランスの一次巻線と二次巻線の間の鎖交磁束が変化します (図 5)。 二次巻線の信号の振幅は鎖交磁束に依存するため、二次巻線の振幅の大きさを使用して、コアの位置、つまり外部物体の位置を判断できます。
汚れた環境または湿った環境 センサーとターゲットの間に大きなギャップが必要です。 . より詳細なページ「静電容量センサーの理論」。 静電容量センサーにはさらに多くの機能があります 高感度非導体よりも導体に。 例としては、最終アセンブリでは見えない内部金属保持リングを必要とするジョイント アセンブリがあります。 オンライン静電容量式センシングは、欠陥のある部品を検出し、システムに信号を送ってラインから取り除くことができます。
静電容量センサーの概要
高性能静電容量センサーは、通常、電子モジュールとケーブルでモジュールに接続されたプローブで構成されます。 これらのシステムは、さまざまな構成と価格帯で利用できます。 静電容量センサーはモジュラー設計を採用しており、電子モジュールの 1 つ以上のチャネルがモジュラー ラックに収容されています。
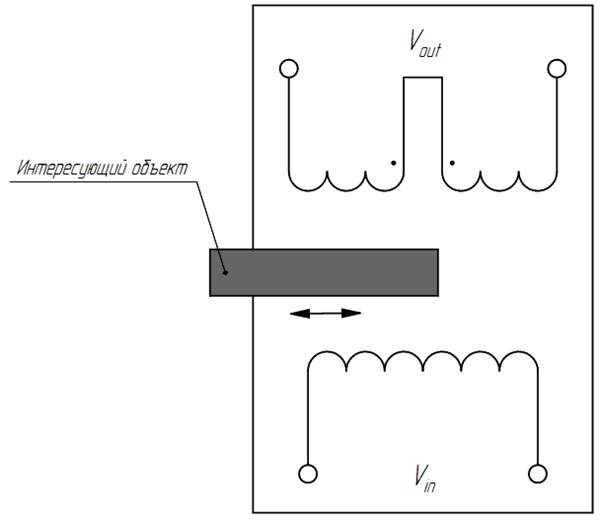
図 5. 変圧器上の誘導変位センサー。
別の構成にはさらに多くの 簡単な回路ただし、強磁性体からなる物体のわずかな動きや振動を測定する必要がある少数のアプリケーションにのみ適しています。 この方式では、目的の強磁性体が磁気回路の役割を果たし、その位置が測定コイルのインダクタンスに影響します (図 6)。
電源出力用とセンサー出力用に別々のコネクタが用意されています。 セットアップが簡単なカラープローブチャンネル。 ユーザー設定がないため、「操作ミス」による不正確な読み取りが防止されます。 このセンサーからの出力は再現可能ですが、線形ではありません。 このシステムは「ゼロシーク」サーボで使用されます。この場合、システムが許容範囲外である範囲を測定するのではなく、容量センサー出力を使用して既知の良好な状態でシステムを制御します。
また、条件付きアクションがトリガーされるしきい値電圧が設定されている場合にも使用されます。 静電容量式タッチ製品の詳細については、こちらをご覧ください。 変位センサとは 変位センサとは、変位量を多くの素子で検出し、距離に換算することでセンサと対象物の距離を測定する装置です。 使用する素子に応じて、光学式変位センサー、線形近接センサー、超音波変位センサーなど、いくつかの種類のセンサーがあります。
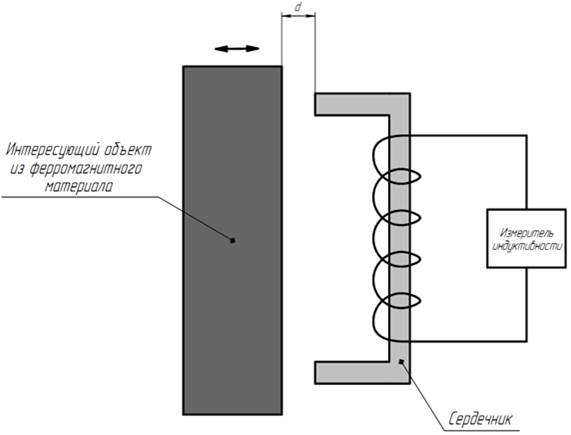
図 6. 強磁性体で作られた物体用の誘導変位センサー。
渦電流式変位センサー
このタイプのセンサーには発電機が含まれています 磁場二次磁場の誘導の大きさを決定するためのレジストラ。 対象物の近くで、発電機は磁場を生成し、対象物の材料を貫通して、その体積に渦電流 (フーコー電流) を生成し、次に二次磁場を生成します (図 7)。 二次磁場のパラメータはレジストラによって決定され、それに基づいて物体までの距離が計算されます。物体に近づくほど、磁束がその体積に浸透し、渦電流と誘導が増加するためです。二次磁場。 同様の原理が渦電流探傷器にも使用されていますが、二次磁場のパラメータは物体までの距離ではなく、内部構造に隠れた欠陥の存在によって影響を受けます。 この方法は非接触ですが、金属体にのみ使用できます。
オブジェクトの物理的なサイズを測定できます。 変位センサは、物理量の変化を計測・検出します。 センサーは、物体の変位量を測定することで、物体の高さ、幅、厚さを測定できます。 測定センサーは、物体の位置と寸法を測定します。
アナログ出力 物理量実行することもできます。 一部のモデルはデジタル通信にも対応しています。 仕事と分類の原則。 三角測量法。 これらのセンサーは三角測量システムを使用しています。 光源からの光はレンズによって集光され、対象物に向けられます。
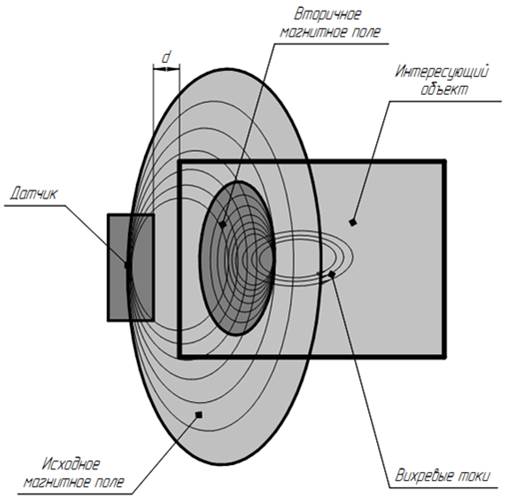
図 7. 渦電流変位センサー。
超音波変位センサー
レーダーの原理は超音波センサーに実装されています。物体から反射された超音波が記録されるため、ブロック図は通常、超音波の発生源とレコーダー (図 8) で表され、通常はコンパクトなケースに収められています。 超音波パルスの送信と受信の瞬間の間の時間遅延を決定することで、最大 10 分の 1 ミリの精度で物体までの距離を測定することができます。 今日、光学センサーと並んで、超音波センサーはおそらく最も用途が広く、技術的に進歩した非接触測定器です。 この測定原理の使用は、欠陥検出器でも見られますが、今回は超音波探傷器でのみ見られます。
正反射モデルと拡散反射モデル。 鏡像は、例えば、鏡または光沢のある物体から生成される。 ビームは、標準的な表面を持つオブジェクトからすべての方向に反射されます。 正反射により対象物からの光を直接反射し、金属などの光沢のある対象物でも安定した測定が可能です。
光線は対象物の表面に垂直に投射され、反射されて戻ってくる散乱光が広い測定エリアで受光されます。 正反射センサヘッドは、対象物からの正反射光を直接受光します。 金属など表面に光沢のあるものは安定して測定できますが、拡散反射型センサに比べて測定範囲が狭くなります。 拡散反射型センサは、センサヘッドを斜めに傾けて正反射光を生成します。
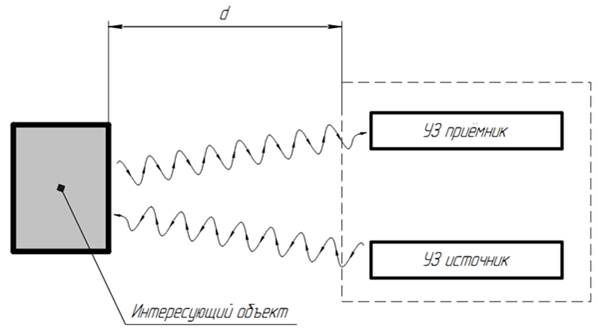
図 8. 超音波変位センサー。
磁気抵抗変位センサー
磁気抵抗変位センサーでは、依存関係が使用されます 電気抵抗外部磁場の誘導の方向と大きさに関する磁気抵抗プレート。 センサーは通常、永久磁石と 電子回路ブリッジ回路とソースに接続された磁気抵抗プレートを含む 定電圧(図 9)。 強磁性材料で構成され、磁場内を移動する対象物は、その構成を変更します。その結果、プレートの抵抗が変化し、ブリッジ回路がミスマッチを記録し、その大きさを判断に使用できます。オブジェクトの位置。
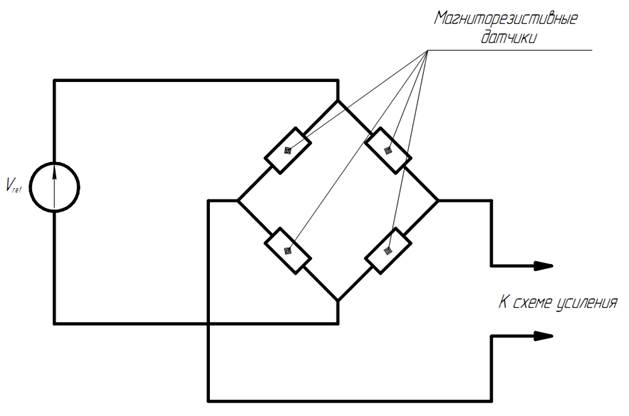
図 9. 磁気抵抗変位センサー。
ホール効果センサー
このタイプのセンサーは、磁気抵抗センサーと同様の設計をしていますが、その動作はホール効果に基づいています。外部磁場の影響を受ける導体を電流が通過すると、電位差が発生します。の 断面導体。
磁歪式変位センサー
原則として、磁歪センサーは拡張チャネル、つまり永久リング磁石が自由に移動できる導波管です。 導波管の内部には、電気インパルスが印加されると全長に沿って磁場を生成できる導体があります (図 10)。 結果として生じる磁場は永久磁石の場に追加され、結果として生じる場は、導波路を含むチャネルの回転モーメントを作成します (ワイデマン効果)。 回転パルスは、チャネル材料の音速でチャネルに沿って両方向に伝播します。 電気インパルスの送信と回転インパルスの受信との間の時間遅延の登録により、永久磁石までの距離を決定することが可能になります。 その位置を決定します。 チャンネルにはかなりの 素晴らしい長さ(数メートルまで)、磁石の位置は数マイクロメートルの精度で決定できます。 磁歪センサーは、優れた再現性、分解能、悪条件への耐性、および温度変化に対する低感度を備えています。
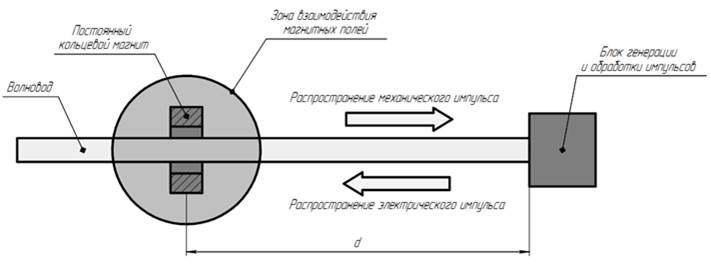
図 10. 磁歪変位センサー。
電位差変位センサー
このタイプのセンサーには、基本的にポテンショメーターを含む電気回路があります (図 11)。 オブジェクトの直線的な動きは、ポテンショメータの抵抗の変化につながります ( 可変抵抗器)。 ポテンショメータに直流電流が流れると、電圧降下は抵抗値に比例し、その結果、対象物の線形変位の大きさに比例します。

図 11. 電位差変位センサー。
機械式変位センサーに加えて、ポテンショメトリック センサーは、そのシンプルさと低コストのために最も広く使用されていますが、光学効果に基づくセンサーは、普遍的で精密な非接触測定にますます使用されています。
回転体の位置のコントローラー(センサー)または別の方法 エンコーダ- これは、回転軸 (シャフト) の位置を決定できる電気機械装置です。 このデバイスでは、機械的な動きが電気信号に変換され、オブジェクトの位置を決定し、シャフトの回転角度、その位置、および回転方向に関する情報を提供します。 エンコーダを使用すると、長さと距離を測定したり、ツールの移動量を設定したりすることもできます。
エンコーダーは、印刷業界、金属加工、エレベーター技術、充填、包装および充填機、テストベンチ、および部品の動きの正確な記録を必要とするロボットやその他の機械で幅広い用途があります。 それらは、以前に広く普及していたセルシンをほぼ完全に置き換えました。
エンコーダの種類
エンコーダーには、インクリメンタル (インクリメンタル) とアブソリュートの種類があります。
知識ベースであなたの良い仕事を送信するのは簡単です。 以下のフォームを使用してください
研究や仕事で知識ベースを使用する学生、大学院生、若い科学者は、あなたに非常に感謝しています.
ポストする http://www.allbest.ru/
ロシア連邦教育科学省
州立教育機関
高等専門教育
リペツク州立工科大学
物理医工学科
主題に関するコースワーク:
«医療用測定トランスデューサおよび電極»
トピック: 「変位センサーと位置センサー」
完了: 学生 gr. IM-09-1
Rossikhin A.N.
承認済み: st.pr. ナザロバ V.A.
リペツク 2011
序章
製造業の自動化が進むにつれ、産業用センサーは生産性と安全性の向上においてますます重要な役割を果たします。
20 年にわたり、センサーとパス メーターは、位置センサー、変位センサーなど、あらゆる業界で使用されてきました。 装置の電子部品と機械部品のリンクとして、変位センサー、位置センサーは、さまざまなプロセスを自動化するための装置の不可欠な要素になっています。
この作業は、非接触センサー、つまり誘導センサー、静電容量センサー、および光学センサーに専念しています。 各タイプには長所と短所があるため、センサーの使用条件と要件に応じて、いずれかのタイプが選択されます。 非接触センサーとは何かを説明し、その利点と使用例について説明します。 私たちの仕事では、静電容量センサーに多くの注意を払いました。 それに基づいて作成された考慮されたデバイス。
この中で 研究活動非接触センサーのデータ処理から得られた情報を提示します。
仕事の目的:デバイス、非接触センサーの動作原理と機能、それらの仕事の根底にある現象、アプリケーションを研究し、それらの長所と短所を特定すること。
タスク 科学的な仕事科学技術情報を収集し、処理する技術を習得することです。
近接センサー誘導光学
1. センサー、一般情報
センサー、センサー(英語のセンサーから)は、制御システム、一次コンバーター、制御された値を使用に便利な信号に変換するシステムの測定、信号、調整、または制御デバイスの要素の用語です。
現在、自動制御システムの構築には、さまざまなセンサーが広く使用されています。
センサーは要素です 技術システム、デバイスまたはプロセスの測定、信号伝達、規制、制御を目的としています。 センサーは、制御された値(圧力、温度、流量、濃度、周波数、速度、変位、電圧、 電気など)を信号(電気、光、空気圧)に変換し、測定対象物の状態に関する情報を測定、送信、変換、保存、登録するのに便利です。
歴史的にも論理的にも、センサーは測定技術と関連付けられています。 計測器、たとえば、温度計、流量計、気圧計、姿勢計など。 一般化された論理概念センサー - 制御装置 - アクチュエーター - 制御の要素として、自動制御システムの開発に関連してセンサーという一般用語が強くなりました。物体。 特殊なケースとして、科学研究システムなどの自動パラメータ記録システムでのセンサーの使用があります。
センサーの概念の定義。
広く使われている主な意味は次の 2 つです。
媒体のパラメータを技術的使用に適した信号、通常は電気信号に変換する敏感な要素。ただし、空気圧信号などの異なる性質のものでもかまいません。
必要に応じて、信号増幅、線形化、キャリブレーション、アナログからデジタルへの変換、および制御システムに統合するためのインターフェース用のデバイスを含む、上記の要素に基づく完成品。 この場合、センサ自体の検知素子をセンサと呼んでもよい。
これらの値は、センサー メーカーによる用語の使用方法と一致しています。 最初のケースでは、センサーは小型で、通常はサーミスタやフォトダイオードなどのモノリシック電子デバイスであり、より複雑な電子デバイスを作成するために使用されます。 2番目のケースでは、既知のインターフェースの1つを介して自動制御または登録システムに接続された、機能が完全なデバイスです。 たとえば、マトリックス内のフォトダイオードなどです。
入力 (測定) 量のタイプに応じて、次のものがあります。
機械式変位センサー (線形および角度)、
空気圧、
電気、
流量計、
速度センサー,
加速度、
気温
圧力など
センサーには次の 3 つのクラスがあります。
アナログセンサー、つまり生成するセンサー アナログ信号、入力値の変化に比例します。
パルス列またはバイナリ ワードを生成するデジタル センサー。
「オン/オフ」(つまり、0または1)の2つのレベルのみの信号を生成するバイナリ(バイナリ)センサー。 シンプルなため広く使われています。
2. 位置センサー
位置センサー(変位センサー)は、固体または液体の形である物体の位置を特定するように設計されたデバイスであり、粒状の物質でもあります。
位置センサーは、リレーまたはロジック回路とプログラマブル コントローラーの両方に基づく、自動化システムの主要な情報源です。 システム全体の信頼性は、不安定要因に最もさらされる要素の信頼性によって決まります。
位置センサー(変位センサー)には、非接触( 誘導センサー、磁気、容量性、超音波、光学) および接触。 2番目のタイプの主な代表はエンコーダです。これは、オブジェクトの回転角度を、この角度を決定できる信号に変換するデバイスです。
出力のタイプに応じて、位置センサー(変位センサー)はアナログ、デジタル、ディスクリート(スイッチ)に分けられます。
3. 近接センサー
近接センサー、近接スイッチは、物体の位置を制御するように設計された産業用オートメーション デバイスです。 GOST 26430-85 では、「近接スイッチ」という用語が導入されました。 その後、GOST R 50030.5.2-99 では、この用語が「非接触センサー」に置き換えられました。 現在、これらの製品には両方の用語が使用されています。
図1.1。 近接センサーの外観
近接スイッチは、影響の対象がスイッチの感度ゾーンに入ると、スイッチング動作を実行します。 作用する物体と近接スイッチの敏感な要素との間に機械的接触がないため、その操作の高い信頼性が保証されます。
図1.2。 近接スイッチ
簡略化すると、近接スイッチの機能図は次の 3 つのブロックで構成されます。
図1.3。 近接スイッチの機能図
影響の対象が検知素子のアクティブな表面に近づくと、非接触スイッチが作動します。 この場合、スイッチング素子は回路内で開閉(または両方の動作)します。 直流最大 400 mA および回路内 交流電流最大250mA。
非接触位置センサーは、感応素子の動作原理(誘導、光学、容量など)に従って分類されます。
近接スイッチは、次のようなさまざまな業界におけるプロセス オートメーションの主要なデバイスです。
工作機械の建物,
自動車、
エンジニアリング、
食品産業など
WB のこのような広い範囲は、彼らの助けを借りて実装された多数の可能な技術的ソリューションによるものです。
オブジェクトの数を数え、
オブジェクト位置制御、
速度検出、
回転角度の決定
などなど。
3.1 誘導センサー
誘導センサーは、機械、機構、ロボットなどの作業体の動きに関する情報を非接触で取得するために設計された非接触センサーです。 この情報を電気信号に変換します。
誘導センサーは、すべての導電性物体を認識して反応します。
誘導センサーは、プロセス制御システムの問題を解決するために広く使用されています。 ノーマル オープンまたはノーマル クローズの接点で利用できます。
動作原理は、センサー内のインダクターによって生成される磁場のパラメーターの変更に基づいています。
磁気回路の要素の 1 つが測定対象の動きに関与し、それによって測定巻線を通る流れと対応する電気信号に変化が生じます。
可動要素が強磁性コアである場合、並進運動または回転中のその動きは、a) コイルの自己誘導係数の変化 (可変インダクタンス) または b) コイル間の結合係数の変化として現れます。トランス(差動トランス)の一次巻線と二次巻線。これにより、二次電圧が変化します。
可変結合トランスでは、1 つの巻線が別の巻線に対して固定されて回転できます (そのうちの 1 つがソースの役割を果たし、もう 1 つがレシーバの役割を果たします)。 一次巻線はインダクタを形成し、誘導電流を伴う二次巻線は回転角度の関数として電圧を与えます (誘導ポテンショメータ、レゾルバ)。
巻線の変位に対する自己誘導 L または相互誘導 M の係数の依存性は、通常、平凡な線形性を持っています。 その線形性は、係数 M と L を持つ 2 つの追加のコイルを差動的に含めることによって大幅に改善できます。このコイルは、所定の変位に対して反対方向に変化し、非線形性を部分的に補償します。
誘導センサーは、正弦波電圧源が供給される回路に接続されます。その周波数は、通常、干渉と磁気損失、およびフーコー電流による損失の両方を減らすために、数十キロヘルツに制限されます。 測定電圧 vm は、x(t) を動かして供給電圧 Es cosшst の振幅を変調することによって得られます。
vm = kx(t) Escos(wst + Ф) (1)。
誘導要素の変化は、変位に比例して発振周波数を変調するのに役立つ場合があります。 いずれにせよ、変調の種類に関係なく、検出を容易にするために、周波数 f はキャリア周波数よりもはるかに低くする必要があります (f 誘導センサーは、その性質上、一方では外部電磁場に敏感であり、他方では、それら自体を誘導することができます。 したがって、誘導センサーは、磁気シールドとして機能するケーシング内に配置する必要があります。 構造 誘導近接スイッチは、次の主要コンポーネントで構成されています。 図2.1。 誘導スイッチ装置 発生器は、物体との相互作用の電磁場を作成します。 トリガーは、切り替え中にヒステリシスを提供し、制御信号のフロントに必要な期間を提供します。 増幅器は、信号振幅を必要な値まで増加させます。 LED インジケータはスイッチの状態を示し、パフォーマンスの監視と迅速な設定を提供します。 この化合物は、固体粒子と水の浸透に対して必要な程度の保護を提供します。 ケースはスイッチの取り付けを提供し、機械的な影響から保護します。 真鍮またはポリアミドでできており、ハードウェア製品で完成しています。 基本的な定義。 1. アクティブゾーン。 非接触誘導スイッチのアクティブ ゾーンは、センサーの検出素子の磁場が最も集中する、その感知面の前の領域です。 この表面の直径は、センサーの直径とほぼ同じです。 米。 2.2. センサーアクティブエリア 2.公称検出距離。 図2.3。 定格開閉距離 公称スイッチング距離は、センサの製造パラメータの変動、温度および供給電圧の変化を考慮していない理論値です。 定格検出距離 (Sn) は、定格供給電圧と温度で特定のサイズに対して正規化されたセンサーの主要なパラメーターです。 作動距離は、感知素子の寸法が大きくなるにつれて増加し、したがってセンサの寸法が大きくなるにつれて増加します。 GOST R 50030.5.2-99 によると、誘導センサーは保証された応答間隔、つまり 0 (つまり、敏感なセンサー ヘッドの表面から) から請求された Sn の 81% の範囲で動作する必要があります。標準化されたスチールターゲット。 センサーの応答間隔は、客観的に周囲温度に依存します。 原則として、センサーは、影響の対象(可動構造要素)がデバイスの感知面と平行に移動するように取り付けられます。 3.作業クリアランス。 作動ギャップとは、許容温度および電圧制限内で近接スイッチの信頼性の高い動作を保証する任意の距離です。 図 2.4. 測定されたギャップを持つセンサーのスキーム ワーキングクリアランス補正係数。 補正係数により、影響の対象が作られている金属に依存するワーキングギャップを決定することができます。 凹型設計 (金属に面一で設置できる) と非凹型のセンサーがあります。 2 番目のケースでは、センサーの検出距離が長くなります。 この図は、ディスクまでの距離に対する出力信号の依存性を示しています。 図2.5。 出力信号の距離に対する横方向近接センサ依存性。 3.1.1. 可変インダクタンスセンサー N ターンのワイヤのコイルの自己誘導係数 L は、それに関連する磁気回路の磁気抵抗に依存します。 L = N2/R、ここで R = . ここで、m は透磁率、S はループの断面積です。 磁気回路のさまざまなセグメントの断面積が一定の場合、 ここで、lf と l0 はそれぞれ強磁性体と空気中の力線の長さ、sf と s0 は磁気回路とギャップの断面積、mf は強磁性体の比透磁率 (約 103h104 ) および mo = 4p 10-7 (SI 系)。 測定可能なギャップを持つ磁気回路。 一般式に基づいて、自己誘導係数の式を確立するのは簡単です。 インダクタンスはギャップ測定に敏感でなければならないため、l0 » lf / mf を選択する必要があり、そこから L の式が得られます。 ライニングの Dx を移動すると、ギャップの Dl0 = 2Dx が変化し、インダクタンスは新しい値を受け取ります。 感度は、プレートの初期位置 l0 に依存します: 高いほど、l0 は小さくなります; この場合、感度は、変位が l0 と比較して非常に小さい場合にのみ一定と見なすことができます。 これにより、このタイプの変形のセンサーの使用はミリ単位で制限されます。 感度と直線性は、可動ライニングに対して対称に配置された 2 つの同一の巻線とコアを差動的に含めることによって改善できます。 コアが動くコイル。 位置や動きを測定したい部分に強磁性コアを接続します。 このコアは、長さ l (図 2.6) にわたって均等に配置された N ターンのワイヤを含む巻線に可変深さ lf で浸漬されます。 米。 2.6. 可動コアコイルの模式図。 1 - コイル; 2 - 磁気コア。 巻線の自己誘導係数 L は、コアの浸漬深さに依存します。 L を計算するとき、インダクタンスは、自己誘導係数 Lo を持つ長さ l0 の空気充填インダクタンスと、自己インダクタンス係数 Lf を持つ長さ lf の鉄心インダクタンスの直列結合と見なされます。 相互誘導係数はMに等しい。 ここで、結合係数は一定であると仮定されます。 米。 2.7. 2 つの可動コア コイルの差動作動。 3.2 静電容量センサー 静電容量センサー、非電気量 (液体レベル、機械力、圧力、湿度など) を静電容量値に変換する測定コンバーター。 構造的には、静電容量センサーは、電気プレーン パラレルまたは円筒形のコンデンサーです。 静電容量式近接スイッチの動作原理 静電容量センサーには、アクティブな表面に拡張されたコンデンサープレートの形の敏感な要素があります。 静電容量センサーの動作原理は、コンデンサーの形状の変化 (つまり、プレート間の距離の変化)、またはプレート間のさまざまな材料の配置による静電容量の変化のいずれかに基づいています。導電性または誘電体。 静電容量の変化は通常、交流電気信号に変換されます。 動作原理は、コンデンサの電気容量の寸法、プレートの相対位置、およびそれらの間の媒体の誘電率への依存に基づいています。 2 プレート フラット コンデンサの場合、静電容量は次の式で決まります。 ここで、e0 は誘電率です。 e は、プレート間の媒体の比誘電率です。 Sはプレートのアクティブエリアです。 d は、コンデンサ プレート間の距離です。 依存性 C(S) および C(d) は、機械的変位を静電容量の変化に変換するために使用されます。 任意の材料で作られた物体がアクティブな表面に近づくと、コンデンサの静電容量、発電機のパラメータが変化し、最終的にはスイッチング素子がスイッチングされます。 静電容量センサーのデバイスと動作原理 米。 2.8。 静電容量センサーデバイス 静電容量式近接センサーは次のように機能します。 1. 発生器は、物体と相互作用するための電場を提供します。 2. 復調器は、発電機の高周波振動の振幅の変化を DC 電圧の変化に変換します。 3. トリガーは、スイッチング信号エッジとヒステリシス値の必要なスロープを提供します。 4. 増幅器は、出力信号を必要な値まで増加させます。 5. スイッチの状態をLEDで表示し、操作性、設定の迅速性を確保。 6. 化合物は、固体粒子と水の浸透に対して必要な程度の保護を提供します。 7.ケースはスイッチの取り付けを提供し、機械的衝撃から保護します。 真鍮またはポリアミドでできており、ハードウェア製品で完成しています。 容量性非接触センサーのアクティブな表面は、2 つの金属電極によって形成されます。これは、「ラップされていない」コンデンサーのプレートとして表すことができます。 回路に含まれる電極 フィードバックアクティブな表面の近くに物体がない場合、生成しないように構成された高周波自己発振子。 静電容量式近接センサーのアクティブな表面に近づくと、物体が電界に入り、フィードバック静電容量が変化します。 ジェネレーターは振動を生成し始め、その振幅はオブジェクトが近づくにつれて増加します。 振幅は、出力信号を生成する後続の処理回路によって推定されます。 静電容量式近接センサーは、導電性物体と誘電体の両方によってトリガーされます。 導電性材料でできた物体にさらされた場合、実際の検出距離 Sr は最大になり、誘電体材料で作られた物体にさらされた場合、距離 Sr は材料の誘電率 er に応じて減少します (Sr 対 er のプロットと材料の誘電率の表)。 異なる誘電率を持つ異なる材料で作られたオブジェクトを扱う場合、Sr 対 er のプロットを使用する必要があります。 サーキット ブレーカの技術データで指定されている定格動作距離 (Sn) と保証暴露間隔 (Sa) は、接地された金属ターゲット (Sr=100%) を参照しています。 実際の検出距離 (Sr) を決定するための比率: 0.9 Sn< Sr < 1,1 Sn. 図 2.9. 実際の作動距離 Sr の対象材料の誘電率 Еr への依存性 一部の材料の誘電率: 静電容量センサーは、単極 (1 つのコンデンサーのみを含む)、差動 (2 つのコンデンサーを含む)、またはブリッジ (ここでは 4 つのコンデンサーが既に使用されています) にすることができます。 差動センサーまたはブリッジ センサーの場合、1 つまたは 2 つのコンデンサが一定または可変であり、互いに接続されています。 実際には、導電性の物体の変位を測定する場合、その表面はしばしばコンデンサプレートの役割を果たします。 図上。 2.10. ユニポーラ容量センサーの回路図が示されています。ここでは、コンデンサ プレートの 1 つが同軸ケーブルの中心導体に接続されており、物体自体がもう 1 つのプレートです。 変換器自体のプレートは、直線性を向上させ、エッジ効果を低減するために接地シールドで囲まれていることに注意してください。 一般的な静電容量センサーは、3 MHz 範囲の周波数で動作し、高速で移動する物体の動きを検出できます。 統合された電子インターフェースを備えたこのようなトランスデューサの周波数応答は、40 kHzの範囲にあります。 静電容量式近接センサーは、導電性物体を扱うときに非常に効果的であり、電極と物体自体の間の静電容量を測定します。 静電容量式センサーは、非導電性の物体でも非常にうまく機能しますが、精度は多少低下します。 電極の近くに侵入した物体には、それ自体の誘電特性があり、電極とセンサー本体の間の静電容量が変化し、物体と検出器の間の距離に比例した出力信号が発生します。 アクティブ シールドは、感度を高め、ユニポーラ静電容量センサーのエッジ効果を低減するために使用されます。 この場合、スクリーンは電極の非作用面の周りに配置され、電極の電圧に等しい電圧がスクリーンに印加されます。 スクリーンと電極の電圧は同じ振幅と位相を持っているため、それらの間に電界はなく、スクリーンの後ろにあるすべてのコンポーネントはセンサーの動作に影響を与えません。 このシールド方法を図 1 に示します。 2.11. 図 2.10. シールドリング付き静電容量センサー、断面図 米。 2.11. 電極の周囲にアクティブシールドを備えた静電容量式物体距離センサー 近年、ブリッジ静電容量式変位センサが非常に普及しています。 図上。 2.12. 固定距離 d で平行に配置された 2 つのグループの平面電極で構成される線形ブリッジ静電容量式変位センサーが表示されます。 静電容量を大きくするには、電極間の距離を十分に小さくする。 電極の固定グループは 4 つの長方形要素で構成され、可動グループは 2 つの長方形要素で構成されます。 6 つの要素はすべて同じ寸法です。 線形範囲を広げるには、各要素のサイズをできるだけ大きくすることが望ましいです(ここでは、原則として、機械的強度の制限が影響し始めます)。 固定サブグループの 4 つの電極は、電線によって相互に交差接続されており、これは容量性ブリッジ型回路を形成するために行われます。 ブリッジ回路には、周波数 5 ~ 50 kHz の正弦波電圧が印加されます。 差動増幅器は、可動グループ内の一対の電極間の電圧差を増幅します。 増幅器の出力信号は、同期検波器の入力に供給されます。 コンデンサ容量。 2つの平行プレートを備えたブリッジ型静電容量センサー:A - グループの配置、B - 対応する領域の反対側に位置する可動プレートの部分の面積に比例する、互いからの公称距離の等価回路静止プレート。 図上。 2.12. 容量性ブリッジ構成の変位エンコーダの等価回路が示されています。 静電容量式変位センサーには、幅広い用途があります。 それらは、オブジェクトの位置と動きを決定するために独立して使用することも、さまざまな力、圧力、温度などの作用によって個々の要素の動きが引き起こされる他のセンサーの一部として使用することもできます。 図 2.12。 ブリッジ静電容量センサー。 3.3 光センサー(光電センサー) 光センサーは、光束の強度の変化を記録して応答するデバイスです。 アナログとディスクリートの光学センサーがあります。 アナログセンサーの場合、出力信号は周囲光に比例して変化します。 アプリケーションの主な分野は、自動照明制御システムです。 ディスクリートタイプのセンサーは、所定の照度値に達すると、出力状態を反対に変更します。 機械的接触センサーと電位差センサーに次いで、光学検出器は、物体の位置と動きを特定するためのおそらく最も一般的なデバイスです。 光学式変位センサの構成は、原則として、光源、光検出器、光を制御するデバイス(レンズ、ミラー、光ファイバーなど)の3つのコンポーネントで構成されます。 米。 3.1. 光センサーデバイス。 保護スクリーンまたは冷却を使用して、光学センサーを使用して、加熱されたオブジェクトを配置またはカウントします。 GOST R 50030.5.2 に従って、光近接スイッチは次の 3 つのグループに分類されます。 タイプT - エミッターからの直接ビームの受信を伴う; タイプR - リフレクターから返されたビームを受信します。 タイプ D - 物体から拡散反射されたビームを受信します。 光センサタイプTは、投光器と受光器が別々の筐体に配置されているのが特徴です。 直接光ビームはエミッターからレシーバーに向かい、影響を受けるオブジェクトによってブロックされる可能性があります。 投光器と受光器は、異なる電源から電力を受け取ることができます。 エミッタインジケータは供給電圧を知らせます。 レシーバーがトリガーされると、レシーバーのインジケーターが信号を出します。 スイッチング素子はレシーバー内にあります。 Rタイプの光センサは、投光器と受光器が同じハウジング内に配置されています。 受信機は、特殊な反射板から反射されたエミッター ビームを受信します。 タイプ D 光学センサーは、エミッターとレシーバーが同じハウジング内に配置されています。 受信機は、ターゲットから拡散反射されたビームを受信します。 オブジェクトは、相対軸に沿って移動することも、相対軸に対して斜めに移動することもできます 3.3.1 アブソリュートデジタルエンコーダ これらは、直線運動用のレールまたは角度運動用のディスクであり、N 個の等しい領域 (レールの場合はバンド、ディスクの場合はセクター) に分割されています。コードと特定のテクノロジー。 サイトの数 N によって解像度が次のように決定されます。長さ L cm のレールの場合は L/N cm、ディスクの場合は 360°/N です。 各ワードを構成するすべての n ビットは、値 0 または 1 を決定するために 2 つの異なる物理状態を使用して、n 個の平行 (レールの場合) または同心 (ディスクの場合) のトラック (図) で具体化されます。 a) 非磁化性または強磁性体の表面 (磁気読み取り); b) 絶縁面または導電面 (電気感知); c) 不透明で半透明の表面 (光学読み取り値)。 現在、光学読み取りが最も一般的に使用されています。 各トラックには、ソース - エレクトロルミネッセンス ダイオードとレシーバ - フォトトランジスタがあります。 米。 3.3. 自然なバイナリ コードを使用したレーキとディスク。 米。 3.3. グレイコードのレールとディスク。 4. 近接センサー このタイプのセンサーには、デバイスと移動物体の間に機械的な接続がありません。 それらの間の相互作用 - それらの相互の位置の関数 - は、次のように機能するフィールドによって確立されます。 可変磁気抵抗を備えたセンサーの磁気誘導フィールド (ホール効果が使用されます)。 フーコー電流によるセンサーの電磁場。 静電容量センサーの電磁場。 近接センサーの利点は、そのような機械的接続がないという事実に由来します。 これらには以下が含まれます: 広帯域幅; 測定対象物とセンサーの間に発生する力が非常に小さいため、測定対象物への影響が少ない。 摩耗やクリアランスの増加の影響を受ける可動部品がないため、信頼性が向上します。 さらに、これらのセンサーは、測定回路と移動物体のガルバニック絶縁を提供します。 主な欠点は次のとおりです。 小さい、約 1 mm、測定範囲。 非線形性; それらのいくつかの読み取り値が、オブジェクトの形状、サイズ、材料、およびその環境に依存しているため、特定のアプリケーション条件でのキャリブレーションが必要になります。 近接センサーは、アナログ モードまたはデジタル コード モードで使用されます。 前者の場合、信号振幅は対象物とセンサーの相対位置の連続関数であり、後者の場合、信号レベルは、対象物が特定の距離よりも近いか遠いかに応じて、高くも低くもなります。距離: 後者の場合、センサーは近接検出器と呼ばれます。 このセンサーの使用により、以下を決定します。 公称範囲 - センサーの軸に近づくと、標準オブジェクトがセンサーの出力でコード状態の変化を引き起こす距離。 差分またはヒステリシス コース - 標準オブジェクトがセンサー軸に沿って近づいているか離れているかに応じて、コード状態の変化に対応する距離の差。 いくつかの可能なアプリケーションを図に示します。 4.1 これらには次のものが含まれます。位置の測定と安定化。 サイズ管理; 低慣性物体の運動の研究。 米。 4.1. 近接センサー。 a - ポジション; b - 調整; c - 2 つの座標での調整。 g - 直径; e - 縦方向および横方向の動き; e は油膜の厚さです。 g - 金属上の断熱材の厚さ。 h - 金属の厚さ; そして - サイズ; k、l - 動的変位、m - 静的変位。 4.1 磁気抵抗可変誘導型センサ このようなセンサーは変圧器であり、その磁気回路には移動物体が含まれています(図4.2)。 この変圧器は強磁性体であるか、強磁性体の表面を持っている必要があります。 米。 4.2. 磁気抵抗可変式近接センサ。 1 - 磁気スクリーン。 2 - 二次巻線。 3 - 強磁性表面。 4 - 一次巻線。 対象物とセンサーヘッドの間の距離は、ギャップとして機能し、磁気回路の抵抗を決定します。したがって、二次巻線を通過する磁束と、一次巻線が励磁されたときの端子の電圧が決まります。 測定信号 vm である二次巻線の電圧は、次の形式で書かれた法則に従って非線形に変化します。 ここで、x は対象物からセンサーまでの距離であり、vmo と a は、特に透磁率、対象物の形状と寸法に依存します。 信号は、特定の位置 Do に対する小さな変位に対して線形化できます。2 つの同一のセンサーが移動物体の反対側に接続され、差動回路に従ってオンになっている場合: 一次巻線は直列または並列に給電され、二次巻線は直列または並列に給電されます電圧 vm1 と vm2 は反対方向に接続されています。 この場合の測定電圧は次のようになります。 4.2 フーコー電流による誘導センサー このタイプのセンサーの主な要素は、高周波で電力を供給されるコイルであり、その周囲の空間に交番磁場を誘導します。 フーコー電流は、このゾーンに置かれた金属の物体で発生します。 レンツの法則によると、彼らは自分を引き起こした原因を補償しようとします。 したがって、それらはコイルの誘導とは逆の符号の誘導を引き起こし、自己誘導係数の減少につながります。 強磁性物体にのみ適した可変磁気抵抗を備えたセンサーとは異なり、フーコー電流を備えたセンサーは、あらゆる金属物体に敏感です。 ただし、その読み取り値は、オブジェクトまでの距離だけでなく、その物理的特性 (抵抗率、透磁率) および幾何学的特性 (形状とサイズ) にも依存します。 通常、物体とセンサーは空中に置かれます。 このデバイスは、動作周波数での低損失を特徴とする誘電体媒体でも使用できます。 米。 4.3. コイルと導電体の誘導結合。 対応する簡易配線図。 1 - オブジェクト。 2 - 励磁コイル。 初等物理理論。 このタイプのセンサーの動作の単純化された理論は、相互誘導によってコイルに接続された集中定数素子を備えた回路に金属物体を例えることによって説明できます (図 4.3)。 一次回路を形成するコイルとその電源は、次の式で表されます。 およびオブジェクト(二次回路) - 式による オブジェクト プロパティの影響。 抵抗率。 オブジェクトとの接続は、一次インダクタンスに影響を与えますが、オブジェクトの抵抗が小さいほど、つまり それを構成する材料の導電率が低いほど。 この場合、移動体にアルミニウムなどの導電性の高いシートやコーティングを施すことで、測定器の感度を向上させることができます。 透磁率。 強磁性体をコイルに近づけると、2 つの相反する効果が発生します。磁気回路の抵抗が減少するとインダクタンスが増加する傾向があり、フーコー電流によってインダクタンスが減少します。 結果として生じるインダクタンスの変化の方向は、物体の透磁率と抵抗率の値の比率に依存します。 寸法。 フーコー電流のほぼすべてのセットが表層に局在していると仮定され、その厚さは表皮層 q の約 3 倍であり、式は次の形式を持ちます。 ここで、m と y はそれぞれ物体の透磁率と導電率、f はコイルの誘導場の周波数です。 したがって、1 MHz の周波数では、q? が得られます。 アルミニウムの場合は 80 ミクロン、d? 鋼の場合は 20 µm。 皮膚層の厚さの 3 倍以上であれば、センサーの応答はオブジェクトの厚さに依存しません。 オブジェクトの横方向の寸法も、コイルの直径よりも大きい場合はほとんど影響しません。 測定方式。 アナログセンサー。 通常、ブリッジの隣接する脚にある 2 つ目のインダクタンスは、ランダムな影響を補償するために測定インダクタンスに差動接続されます。 2 番目のインダクタンスは次のようになります。 移動物体と同じ性質の固定物体モデルの隣に配置された基準インダクタンス(この場合、測定信号は変位の非線形関数です)。 このオブジェクトの動きが2つのインダクタンスの反対の変化を伴うように、オブジェクトに対して配置された可変インダクタンス(この差動スイッチング方法により、限られた変位領域でセンサー特性を線形化できます)。 近接検出器。 物体までの距離が特定の距離よりも大きいか小さいかだけで物体の位置を知るだけで十分な場合、通常、インダクタンスは発電機の共振回路の回路に配置されます。 物体が近づくと、損失が増加し、インダクタンスが減少し、その結果、負荷回路の品質係数 Q が減少します。 しきい値に対応する Q の特定の最小値を下回ると、生成が停止します。 対応する回路がこれを検出し、生成の有無を通知します。 4.3 ホール効果センサー ホール効果は、誘導場 B に配置された導体の電流線に垂直な電位差 VH の出現で表されます。 ホール電圧 VH は、V の方向と大きさに依存します。ホール効果は、電荷の移動に作用するラプラス力の結果です。 ホール効果に基づくセンサーは、プレート (通常は半導体) の形をしたプローブを形成します。プローブは、電流が通過し、ホール電圧が測定されるエッジと、誘導磁場 B を生成する磁石を形成します。プローブの領域での値 (電圧 VH など) は、磁石の位置に依存します。 要素の 1 つ (プローブまたは磁石) は固定されており、もう 1 つは移動する物体に接続されています。 通常、低レベル信号のモバイルソースとの電気通信の問題を回避するために、プローブは固定されています。 この場合、物体の動きが乱されないようにするためには、磁石の質量を比較的小さくする必要があります。これにより、誘導を測定できる領域が制限され、測定範囲が狭くなります。 ホール効果の初等物理理論。 導電性の長方形の板 (長さ L、幅 l、厚さ e) に電位差 V が印加され、縦方向に電流 I が発生したとします (図 4.4)。 米。 4.4. ホール効果を利用したプローブの模式図。 導電率が濃度 n と移動度 m の電子によって提供されると仮定すると、次のようになります。 ここで、c は抵抗率、c = 1/qmn (q = 1.6 10-19 C)、V = ExL、Ex は縦電界、ここから I = qmnExel です。 プレートは、プレート BN の平面に垂直なコンポーネントを持つ誘導フィールド B に配置されます。 速度 v で移動する電子に作用するラプラス力 FL は、FL = -qvB に等しく、v = -mEx です。 この力は y が増加する方向に向けられ、値は 力 FL の作用下で、電子は y が増加する側からプレートの側面に蓄積し、反対側に反対の符号の同じ電荷を残します。 これらの電荷は、y 軸に平行な電界 Ey を生成し、y が増加する方向に向けられ、Fy = -qEy の力で各電子に作用します。 両方の力が釣り合ったとき、平衡状態に達します。 ホール電圧 VH は、プレート幅の積に対応します。 または、以前に見つかった電流 I の式が与えられると、 ここで、KH = -1/qn はホール定数です。 フォノンによる可動電荷の散乱を考慮したより厳密な理論では、以前の KH 式に 3p/8 を掛けることになります。 いくつかの典型的なホール センサー材料の大きさの順序を表に示します。 数値例。 抵抗率 5・10-5 Ohm・m のインジウム砒素製の厚さ 0.1 mm のプレートに 1 mA の電流を流し、電圧 104 Gs の通常の誘導場に置いた場合、ホール電圧の 3.8 mV が表示されます。 ホール定数は、自由キャリアの密度に影響を与えるため、温度に依存します。 温度感度 (1/KN) (d KN/dT) は、材料によって広範囲に変化し、1°C あたり数 % に達することがあります。 B の値の関数としての KN の変化は、測定範囲の数% 程度の直線性からの偏差をもたらす可能性があります。 この非線形性の符号は、材料によって異なります。 センサー設計。 ホール効果センサーが直接感知する測定量は、磁気誘導の通常の成分 BN です。 対応する感度は 感度は、プローブを通過する電流 I に比例します。 それは、プローブの設計 (厚さ e と KH 係数に応じた材料の選択) に依存します。 センサーを使用して位置または変位を検出する場合、誘導磁石は、センサーが直接感知する二次測定量を変更するために、一次測定量 (位置または変位) によって作用される中間トランスデューサーとして機能します。 位置感度 Sx は次の式で与えられます。 位置感度Sxは、特に、変位領域における誘導の法線成分の勾配に比例する。 この勾配は、磁石の性質とプローブに対するその位置に依存します。 通常、これは重要な値を持ち、非常に限られた領域 (1 mm 程度) でのみほぼ一定です。 素材選びの基準。 ホール電圧は電流 I に比例しますが、この電流は発生するジュール熱によって制限されます。ジュール熱は消費電力 Pd に比例します。 Pd 関数では、ホール電圧は次のように表されます。 大きな入力抵抗を持つデバイスで測定を実行し、消費電力が制限内の加熱を提供するように設定されている場合、/n 項が最大になる材料を選択する必要があります。 たとえば、測定が整合抵抗でホール発生器によって消費される電力に関係する場合、最大値は値である必要があります。 近接検出器。 これは、ヒステリシス レベル コンパレータであるホール プローブにシュミット トリガーを取り付けることによって実現され、それぞれ上向きまたは下向きに変化するかどうかによって (BN + および BN-) を許容します (図 4.5)。 通常、DBN ヒステリシスは数十 mT のオーダーであり、通常のバックグラウンド誘導よりも高いため、これらの誘導によって引き起こされる可能性のある誤警報を回避することができます。 米。 4.5. ホール効果近接検出器と相互作用の特性評価。 5. センサーの長所と短所 5.1 誘導センサー 利点 機械的摩耗なし、接触不良なし 連絡先のバウンスや誤検知はありません 3000 Hz までの高いスイッチング周波数 機械的ストレスに強い 欠点 - 感度が比較的低い、誘導抵抗が電源電圧の周波数に依存する、測定値に対するセンサーのフィードバックが大きい(アーマチュアがコアに引き付けられるため)。 5.2 静電容量センサー 静電容量センサーの利点は、シンプルさ、高感度、低慣性です。 短所 - 外部電界の影響、測定装置の相対的な複雑さ。 5.3 光センサー 利点 - 検出距離が長い (最大 50 m) ため、光学式近接センサーは業界内外で広く使用されています。 5.4 超音波センサー それらは、光学的および電気的特性に関係なく、さまざまなオブジェクトの位置と寸法の非接触制御を可能にし、プロセス機器で液体とバルク材料の充填レベルを測定し、シートの巻き取りの直径を制御するために広く使用されています材料と他の問題を解決します。 特殊な超音波センサーにより、エッジの位置と透明なポリマーフィルム、布、紙の厚さを決定できます。 超音波センサーの動作は、圧電効果に基づいています。これは、電界が印加されたときのセラミックまたは水晶板の幾何学的寸法の変化と、機械的影響下での板の表面の電界の出現です。 . 印加電界の周波数 (300 kHz) でプレートが振動すると、同じ周波数の音波が発生します。 これらの波は空気中を毎秒 330 m の速さで伝播します。 それらは、エコーのように、オブジェクトから反射され、エミッターに戻ります。 プレートに作用すると、音波がプレート上に電場を発生させます。 したがって、プレートはまず超音波のエミッターとして機能し、次に超音波の受信機として機能します。 センサーの応答範囲は、これらの波の放射出力と、センサーが反射を待機する時間間隔を変更することによって調整されます。 5.5 ホール効果センサー プローブを磁石を運ぶ物体から分離する非強磁性シールドを通して位置または動きを測定する機能。 6. センサーの応用 産業界における位置センサーと変位センサーの用途はさまざまです。 特に、医学では、非接触センサーは、ガンマカメラ、蛍光写真、MRI、超音波、砕石器などのデバイスで使用されています。 6.1 誘導センサー 誘導センサーは、機械、機構、ロボットなどの作動部分の動きに関する情報を非接触で取得するために使用されます。 この情報を電気信号に変換します。 CNCマシン、プレス、射出成形機、搬送ライン、自動バルブ、包装機などに搭載されています。 6.2 静電容量センサー 静電容量センサーは、角度変位、非常に小さな直線変位、振動、移動速度などを測定し、特定の機能 (高調波、のこぎり波、方形など) を再現するために使用されます。 誘電体の移動、変形、または組成の変化により誘電率 e が変化する容量性トランスデューサは、非導電性液体、バルクおよび粉末材料、非導電性材料の層の厚さのレベルセンサーとして使用されます。 、および湿度と物質組成の監視。 6.3 光センサー 光学センサーは、あらゆる産業で物体の位置決めやカウントに使用されています。 光センサーはいたるところにあり、私たちの日常生活で使用されています。 それらは、ガレージのドアの開閉プロセスを制御し、シンクの水を非接触でオン/オフし、エスカレーターの動きを制御し、スーパーマーケットのドアを開け、写真を仕上げるのに役立ちます。 6.4 超音波センサー ジャムコントロール 人感センサー ロボティクス用近接センサー 引き出し空コントロール コンベア上の品質管理 トレイの存在の制御 糸・断線管理など 充填制御 ロール径チェック 人感センサー 車両位置(近接センサー) 結論 科学的研究では、非接触センサーの主な種類、それらの機能と動作原理、およびそれらの適用範囲が考慮されました。 近接スイッチは、次のようなさまざまな産業のプロセスを自動化するための主要なデバイスであると要約できます。 工作機械の建物, 自動車、 石油化学産業、 エンジニアリング、 食品産業など WB のこのような広い範囲は、彼らの助けを借りて実装された多数の可能な技術的解決策によるものです。 オブジェクト位置制御、 物の有無の登録、 寸法、色、その他の物理的特性によるオブジェクトの選択、 速度検出、 回転角度の決定 などなど 近接スイッチの利点: 高信頼性; 入力に対する出力値の明確な依存関係。 経時的な特性の安定性; 小さいサイズと重量; オブジェクトに関するフィードバックはありません。 さまざまな動作条件下で動作します。 参考文献 1. ジャーナル「モダン エレクトロニクス」2006 年第 6 号 2. ウェブサイト www.sensor-com.ru 3. ウェブサイト www.datchikisensor.ru 4. Mil G. モデルの電子リモコン。 - M.: 1980. 5.アッシュ。 J. et al. - 測定システムのセンサー - M.: 1992. 6. Journal "Components and Technologies" No. 1, 2005, Alexander Krivoruchenko による記事 "非接触位置センサー。 適用の選択と実践の問題」2005 7. サイト ru.wikipedia.org Allbest.ruでホスト ホール効果に基づく、静電容量、光学、誘導、渦電流、超音波、磁気抵抗、磁歪、電位差など、さまざまなタイプの変位センサーの設計と動作原理。 デバイスの使用領域。 要約、2015 年 6 月 6 日追加 センサーの概念と一般的な特性。 速度センサーと加速度センサーの動作の特徴の考察。 光学、電気、磁気、および放射線測定方法の特性評価。 実際の光学センサー、速度センサー、加速度センサーの分析。 タームペーパー、2016 年 1 月 14 日追加 光ファイバー電流センサーの動作におけるファラデー効果の原理。 微細構造光ファイバーの開発と研究。 光ファイバーセンサーと変流器の比較。 光ファイバー電流センサーの潜在的なアプリケーション。 要約、2015 年 11 月 12 日追加 SKVTタイプの誘導センサー(サインコサイン回転変圧器)からの信号を処理するためのAngle-Codeコンバーターのマイクロ回路の構造図、特性、および動作モード。 それらに基づく外国の類似体およびモジュールとの比較。 記事、2015 年 1 月 28 日追加 熱抵抗センサーの概念の定義。 抵抗温度検出器の一般的な特性。 抵抗係数(半導体または導体)、デバイスの動作モードの計算。 サーミスタの使用を検討。 要約、2016 年 1 月 12 日追加 光電位置センサー、特性、範囲、動作原理。 デジタルおよびアナログ出力を備えた超音波メーター、その利点。 誘導型位置センサーと変位センサー、測定原理、接続図。 タームペーパー、2014 年 4 月 25 日追加 センサーは、制御デバイスの要素であり、制御された値を便利な信号に変換する主要なコンバーターです。動作原理、マイクロコントローラー(MK)に接続するための回路です。 サウンドインジケーターを備えた静電容量式センサーの一般的な特性、パラメーターの計算。 タームペーパー、2011 年 4 月 12 日追加 容量性存在センサーの動作原理の決定。 MKへの容量導入のセンサーを含めるスキーム。 サウンドインジケーターを備えたデバイスの電気回路の技術的特性と構造。 PIK 施設のセキュリティ検出器のアプリケーション。 タームペーパー、2011 年 9 月 23 日追加 2 つの圧力センサーと 4 つの温度センサー (最大 +125 および最大 +400) で構成されるコンピューティング モジュールの設計。 センサーの配線図を作成します。 DS18B20 デバイス、DS2450 および MPX2010 ADC を操作するためのデモ プログラムの作成。 タームペーパー、2010 年 12 月 24 日追加 静電容量式レベル センサーの一般的なスキーム。 レーダーレベルゲージ、その応用分野。 センサーの垂直取り付け。 ロータリーレベルスイッチの動作原理。 振動式レベルセンサー。 回転センサーの取り付け方法。類似文書