線形変位センサー-主なニュアンス
電子工学科
エッセイ
話題になっている:
「変位センサー »
ミンスク、2008年
測位システムの精度を決定するノードの1つは、変位センサーです。 変位センサーは、値を変換するように設計されています 線形運動または、送りねじの単一コードへの回転角:同じ持続時間と振幅の電気インパルスの単純なシーケンス。その数は、角変位または線形変位の大きさに正比例します。
誘導センサー
誘導センサーと光学センサーは、連続的に変化する量を個別の電気インパルスに変換するために広く使用されています。
誘導センサーの回路を図1に示します。
図1-誘導センサーの図。
機械の可動部には、磁気的に柔らかい素材で作られた細いレールが取り付けられています。 ラック1の突起は、移動中の作業ギャップの磁気抵抗を調整する。 W字型コア2の磁気回路は、互いに向かって接続され、変圧器Trから供給される2つの巻線を有する。 誘導ブリッジの対角線が含まれています 測定器。 中央の位置では、測定ブリッジのバランスが取れており、計測器3のポインターはゼロになります。 わずかな不均衡は、機器のポインタのずれにつながります。 よくできたセンサーは、約2 µmの動きをキャプチャします。 ディスクリート回路には、デジタル-アナログコンバーター(DAC)が必要です。
光光学変位センサー。
親ねじには、多数のスロット(100から800)のあるディスクがあります。 細いビームの形でシリンドリカルレンズを通るランプからの光は、ディスクと光検出器(フォトダイオード)に向けられます。 親ねじピッチが2mmで、ディスク上のスロットの数が400の場合、各電気パルスの離散性は約0.001 mmになり、スロットの数は2000に増加し、ディスクの直径は600mmに増加します。これは許容できません。 。
カウントディスクは、親ねじではなく、それに関連する高速シャフトに取り付けることができます。 ただし、同時に、伝送誤差により読み取り精度が低下します。
精密リニアエンコーダ
精密線形変位センサーは、ラスタースケール、計測回折格子、レーザー干渉計に基づいて構築されています。 最初の2つのタイプのDLPは、同じ動作制御の原理に基づいています。 それらは、定期的に適用されるストロークの形で長いスケールを持ち、同じまたは複数のストロークと穴の周期を持つ短いスケールを対象としています。 スケール上のストロークの配置の空間周波数が50〜100 mm -1を超えない場合、それらはラスタースケールと呼ばれ、100 mm -1を超える場合は、計測回折格子(または回折格子)と呼ばれます。 変位の離散性は1μm未満であることが多いため、ストロークの頻度が高いほど、電気インパルスを形成するための回路の設計が容易になるように思われます。 ただし、ラスタースケールを回折格子に置き換えるだけでは、この場合に発生する多くの影響によって妨げられ、DLRは、メジャーと照準スケール、波長などとの間の距離の変化に敏感になります。ラスタースケールに基づくシステム回折格子には、蓄積システムとモアレ効果を使用したシステムの2種類があります。
蓄積システム
ストレージシステムは、反射型または透過型の光学格子のシステムを使用します。 反射型回折格子を備えた光BRの設計を図2に示します。 スキャニングヘッドの開口部には4つのスリットがあります。 スロットは、光検出器の出力信号が測定格子の周期の1/4だけシフトするように配置されます。 したがって、スロットの変位による信号は、位相がシフトし、光検出器の準正弦波信号になります。 このようなシステムの分解能は0.5µmであり、1〜2 cmの範囲の変位を測定する場合、合計誤差は1 µm以下です。
この方法の欠点:引っかき傷の線とエンジンの定規の厳密な平行度が必要です。 2番目の格子システムはモアレ縞法を使用します。
モアレストライプ法。
モアレストライプは、互いにわずかにオフセットされた2つの同一の格子が重ね合わされて照らされたときに形成されるダークゾーンのシステムです。

図2-反射格子を使用したDLP変位。
1-光源、2-コンデンサーレンズ、3-格子付きスチールスケール、4-開口部、5-光検出器。
グレーティングが互いに対して変位すると、ゾーン(暗い部分と明るい部分)が互いに距離lだけ上下に変位します。 Pはグレーティングステップ、θは傾斜角です。
この方法の主な利点:(反射光学)
1.モアレパターンは、比較的広い波長範囲の光の波長に依存しません。 これにより、通常のミニチュア白熱灯を光源として使用できます。
2.モアレパターンの高コントラストは、格子間の比較的大きな(最大10mm)ギャップで維持されます。
3.モアレパターンのステップは、格子ストローク間の距離の数分の1の変位量に対応できます。
モアレパターンは、透明な格子の出力で形成されます。 モアレパターンの周期の線形幅は次のようになります。
 , (1)
, (1)
ここで、d 1は透明格子の定数、θはストロークの回転角です。
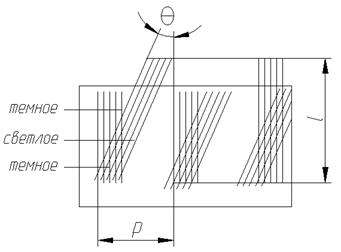
図3-モアレフリンジの形成スキーム。
BRでは、この角度は約10 -4であるため、1 µmの格子シフトは10 mmのモアレパターンシフトに対応し、光検出器で簡単に修正できます。
通常、2つの光検出器で十分です。 それらの中を移動すると、信号が生成されます。
I 1 = k 1(E 0 +Ecos2πX/ε)(2)
I 2 = k 2(E 0±Esin2πX/ε)、(3)
ここで、k 1、k 2-光検出器の感度、E 0-モアレパターンの照明の一定成分のレベルと可変成分の振幅、X-変位量、
-モアレパターン期間の価格。d 2は反射型回折格子の定数、qiは回折最大値の次数です。
反射エネルギーの80%が二等辺リスクのある2番目の反射最大値にあるため、q = 2、ε=d2/4になります。
±εの精度で位置を決定する場合、光源の明るさの変動や格子の反射率の変化など、多くの要因に依存する一定の照明E0の変動により補間が困難になります。
したがって、モアレパターンに沿って配置されたDLRで、周期の1/4のシフトで光検出器が使用されることがあり、2つの信号が形成されます。各信号は、半分の距離に配置された2つの光検出器の信号の差です。モアレパターンの期間。
レーザー干渉計を備えた位置決めシステム
位置決めシステムの精度を向上させ、製造ガイドの精度へのパラメータの依存を排除し、動作中の摩耗を排除したいという要望から、レーザー干渉計を備えた新しいタイプの位置決めシステムが作成されました。
公式に頼らずに、レーザー干渉計がどのように動作するかを定性的に説明しましょう。
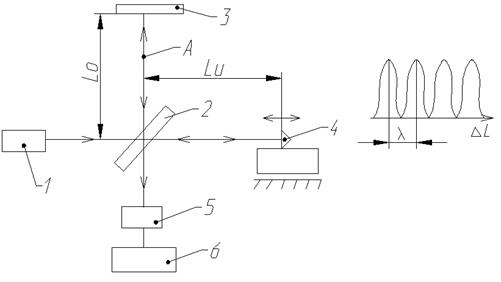
図4-レーザー干渉計の光学レイアウト。
1-レーザー、2-半透明ミラー、3-固定反射ミラー、4-可動部品に取り付けられたリフレクター、5-光検出器、6-電子データ処理デバイス。
低出力ヘリウムネオンレーザーから出てくるビームは、半透明のミラーによって、参照ビームと測定ビームの2つのビームに分割されます。 参照ビームAは、ミラー2からミラー3、さらに光検出器5への光路を通過します。測定ビームBは、可動部分に取り付けられた反射器に到達し、光検出器に戻ります。 その結果、両方のビームが光検出器に接触して干渉します。 光検出器によって記録される光の強度は、両方のビームの光路の長さの違いに依存します。
Δl=Lおよび–Lo。 (四)
ある時点で、参照と測定の両方のビームが同じ位相で出会ったと仮定します。 これは、この時点で、光検出器が最大光強度を記録することを意味します。 しかし、リフレクター4と一緒に部品が動き始めると、測定経路Lの長さも変化し始める。 Δlがレーザーによって生成された光の波長の半分に変わるとすぐに、光検出器での光線の追加が逆位相で発生し、光検出器は最小の放射線、つまり「暗さ」を記録します。 波長の別の半分は測定ビームの経路を変更し、光検出器では再び明るくなり、波長の次の半分は再び暗くなります。 等。 -明暗、明暗。
したがって、Δlがλ/ 2だけ変化すると、光検出器の光強度は最大から最小に、またはその逆に変化します。 移動中にリフレクターがN回変化した場合、これはパーツ(キャリパー)が距離λN/2移動したことを意味します。 数Nは電子装置6によって数えられる。したがって、ワークピースの動きは波長で測定される。
レーザー干渉計の助けを借りて、変位は数百ミクロンから数十メートルまで測定されます。
実際には、レーザー干渉計は通常、機械プログラム制御装置と連動して機能します。 したがって、動きの制御と同時に、それらの自動修正が実行されます。
1-作業ヘッド(チューブ); 2、3-キャリッジ; 4-ミラー; 6-測定ヘッド; 7-セパレータ; 8-レーザー; 9-プリズム。
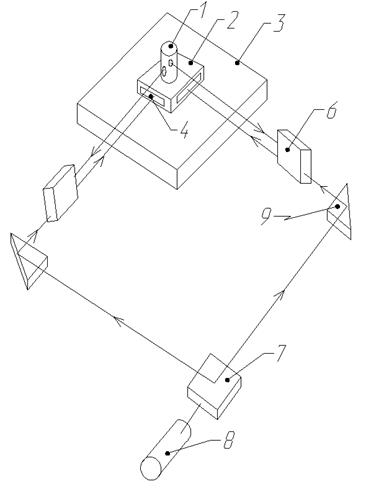
図5-レーザー干渉計を備えた座標テーブルのスキーム。
図5に、レーザー干渉計を使用した座標テーブルの図を示します。 このようなテーブルでは、干渉計の可動アームである2つの相互に垂直なミラーが上部キャリッジに取り付けられています。 2つの固定ミラーまたは干渉計ミラーが作業ヘッドのチューブに取り付けられています。
したがって、干渉計は、固定座標系に対する上部キャリッジの2つの軸に沿った相互変位をカウントします。 ミラーは、10分の1ミクロン以内の十分に高い平坦度で作成できます。 動作中は摩耗しないため、本来の精度を長期間維持できます。 数分の1秒の精度でミラーの相互垂直性を確保するために、特別な光学技術が使用されます。 座標テーブルの精度は、干渉計の精度に大きく依存します。 変位測定値の精度には、レーザー放射周波数の不安定性と、周囲温度、圧力、湿度の変動による放射波長の変化という2つの要因が影響します。 レーザー放射の周波数を安定させるという問題はほぼ解決され、さらに、コンピューターを使用して温度、圧力、湿度センサーからの情報によるエラーを修正することが可能になりました。
文学
1.無線電子手段の設計:Proc。 大学向けマニュアル/O.V.Alekseev、A.A。Golovkov、I.Yu.Pivovarovなど。 エド。 O.V.アレクシーバ。 --M。:高い。 学校、2000年。-479ページ。
2.無線電子機器の技術と生産の自動化:教科書/ A.P. Dostanko、V.L. Lanin、A.A. Khmyl、L.P. アヌフリエフ; 合計未満 ed。 A.P. ドスタンコ。 – Mn.:Vysh。 学校、2002年
3. REAデザイナーのハンドブック: 一般原理設計。 R.G. バルラモフ。 -M .:ラジオ、2000年。
ナレッジベースで優れた作業を送信するのは簡単です。 以下のフォームを使用してください
学生、大学院生、研究や仕事で知識ベースを使用する若い科学者はあなたに非常に感謝するでしょう。
http://www.allbest.ru/でホスト
ロシア連邦教育科学省
高等教育の連邦州自治教育機関
「国立研究トムスク工科大学」
エネルギー研究所
研修の方向性(専門)140400「電力・電気工学」(電気・電子機器)
部門「電気技術複合体および材料」
注釈
コースプロジェクト/作業へ
「自動化システムの電子および電気装置」の分野で
話題になっている" センサー線形運動"
学生grによって実行されます。 5G 2G
V.A. ゴンチャロフ
スーパーバイザー
E.P. ボグダノフ
トムスク2015
1.変位センサー
1.1静電容量式変位センサー
1.2光変位センサー
1.3誘導変位センサー
1.4渦電流変位センサー
1.5超音波変位センサー
1.6磁気抵抗変位センサー
1.7ホール効果センサー
1.8磁歪変位センサー
1.9電位差変位センサー
1.10 誘導センサー変位型LVDTSMシリーズ
2.決済部分
2.1計算用の初期データ
2.2電磁計算
2.3熱設計
3.パラメータの決定と特性の構築
3.1線形変位センサーLDTの出力電圧特性の非線形性の決定
3.2センサー出力特性
3.3勾配係数プロット
3.4荷重特性の構築
結論
参考文献
1. 静電容量センサー
静電容量センサー-これは、オブジェクトの線形または角度の機械的運動の大きさを決定するために設計されたデバイスです。 もちろん、このようなデバイスはさまざまな分野で非常に多くの実用的なアプリケーションを持っているため、動作、精度、価格、およびその他のパラメータの原理が異なる多くのクラスの変位センサーがあります。 すべての変位センサーは2つの主要なカテゴリに分類できることにすぐに注意する必要があります- 線形変位センサーと 角度センサー(エンコーダー)。 このレビューの枠組みの中で、線形変位センサーに主な注意が払われます。
動作原理によれば、変位センサーは次のようになります。
容量性
オプティカル
・帰納的
渦電流
超音波
磁気抵抗
電位差滴定
磁歪
ホール効果に基づく
1.1 静電容量式変位センサー
このタイプのセンサーの動作は、コンデンサの静電容量とその幾何学的構成の関係に基づいています。 最も単純なケースでは、外部の物理的影響によるプレート間の距離の変化について話します(図1)。 コンデンサの静電容量はプレート間のギャップの大きさに反比例するため、他の既知のパラメータで静電容量を決定することにより、プレート間の距離を判断することができます。 静電容量の変化はさまざまな方法で修正できますが(たとえば、インピーダンスを測定することによって)、いずれの場合も、コンデンサを電気回路に含める必要があります。
米。 1.可変ギャップの静電容量式線形変位センサー。
出力パラメータが 電気容量は、可動誘電体を備えたコンデンサを含む回路です(図2)。 コンデンサのプレート間で誘電体プレートを移動すると、その静電容量も変化します。 プレートは対象の物体に機械的に接続することができ、その場合、静電容量の変化は物体の動きを示します。 さらに、オブジェクト自体が誘電体の特性を持ち、適切な寸法を持っている場合、コンデンサの誘電体媒体として直接使用できます。
米。 2.可動誘電体を備えた静電容量式線形変位センサー。
1.2 光変位センサー
さまざまな光学効果に基づいて、変位センサー回路には多くのバリエーションがあります。 おそらく最も人気のあるのは、光学三角測量方式です。位置センサーは、実際には、対象のオブジェクトまでの距離を決定し、オブジェクトの表面によって散乱された放射を固定し、反射の角度を決定する距離計です。長さd-オブジェクトまでの距離を決定することが可能です(図3)。 ほとんどの光学センサーの重要な利点は、非接触測定を実行できることです。さらに、このようなセンサーは通常、非常に正確で高速です。
米。 3.光学三角測量方式に基づく光学変位センサー。
小さな変位と振動のパラメータを登録して決定するように設計された光学センサーの別の実装では、光源と光検出器だけでなく、二重格子構造が使用されます(図4)。 1つのグレーティングは固定され、2つ目は移動可能であり、対象のオブジェクトに機械的に固定するか、何らかの方法でその動きをセンサーに伝達することができます。 可動格子のわずかな変位は、光検出器によって記録される光強度の変化につながり、格子周期の減少に伴い、センサーの精度は向上しますが、そのダイナミックレンジは狭くなります。
図4.回折格子に基づく光学変位センサー。
光の偏光を考慮した光学センサーには、追加の用途があります。 このようなセンサーでは、表面の反射特性に従ってオブジェクトを選択するためのアルゴリズムを実装できます。 センサーは、反射率の高いオブジェクトにのみ「注意を払う」ことができ、他のオブジェクトは無視されます。 もちろん、偏光に対する感度は、そのようなデバイスのコストに悪影響を及ぼします。
1.3 誘導変位センサー
このタイプのセンサーの1つの構成では、感知要素は可動コア変圧器である。 外部物体の動きはコアの動きにつながり、トランスの一次巻線と二次巻線の間の磁束リンケージに変化を引き起こします(図5)。 二次巻線の信号の振幅は磁束リンケージに依存するため、二次巻線の振幅の大きさを使用して、コアの位置、つまり外部オブジェクトの位置を判断できます。
米。 5.変圧器の誘導変位センサー。
別の構成にはもっとあります 簡単な回路ただし、強磁性体で構成されるオブジェクトの小さな動きや振動を測定する必要がある少数のアプリケーションにのみ適しています。 この方式では、対象の強磁性体が磁気回路の役割を果たし、その位置が測定コイルのインダクタンスに影響を与えます(図6)。
米。 6.強磁性体で作られた物体用の誘導変位センサー。
1.4 渦電流変位センサー
このタイプのセンサーにはジェネレーターが含まれています 磁場そして、二次磁場の誘導の大きさが決定される助けを借りて、レジストラ。 対象物の近くで、発生器は磁場を生成し、それが物体の材料を貫通して、その体積に渦電流(フーコー電流)を生成し、それが次に二次磁場を生成します(図7)。 二次磁場のパラメータはレジストラによって決定され、それらに基づいてオブジェクトまでの距離が計算されます。オブジェクトに近づくほど、磁束がそのボリュームに浸透し、渦電流と誘導が増加するためです。二次磁場。 同様の原理が渦電流欠陥検出器でも使用されますが、二次磁場のパラメータは、物体までの距離ではなく、その内部構造に隠れた欠陥が存在することによって影響を受けます。 この方法は非接触ですが、金属体にのみ使用できます。
米。 7.渦電流変位センサー。
1.5 超音波変位センサー
変圧器電磁センサー巻線
レーダーの原理は超音波センサーに実装されています-オブジェクトから反射された超音波が記録されるため、ブロック図は通常、超音波の発生源とレコーダー(図8)で表され、通常はコンパクトなケースに収められています。 超音波パルスを送信および受信する瞬間の間の時間遅延を決定することにより、10分の1ミリメートルまでの精度で物体までの距離を測定することが可能になります。 今日、光学センサーとともに、超音波センサーはおそらく最も用途が広く、技術的に進歩した非接触測定器です。 この測定原理の使用は、欠陥検出器で再び見られますが、今回は超音波欠陥検出器でのみ見られます。
米。 8.超音波変位センサー。
1.6 磁気抵抗変位センサー
磁気抵抗変位センサーでは、磁気抵抗プレートの電気抵抗の外部磁場の誘導の方向と大きさへの依存性が使用されます。 センサーは、原則として、永久磁石と、ブリッジ回路とソースに接続された磁気抵抗プレートを含む電気回路で構成されています。 定電圧(図9)。 磁場中を移動する強磁性体からなる対象物は、その構成を変化させ、その結果、プレートの抵抗が変化し、ブリッジ回路は不一致を記録し、その大きさを判断するために使用できますオブジェクトの位置。
米。 9.磁気抵抗変位センサー。
1.7 ホール効果センサー
このタイプのセンサーは、磁気抵抗センサーと同様の設計ですが、その動作はホール効果に基づいています。外部磁場の影響を受ける導体に電流が流れると、電位差が発生します。の 断面導体。
1.8 磁歪変位センサー
原則として、磁歪センサーは拡張チャネル、つまり導波管であり、それに沿って永久リング磁石が自由に動くことができます。 導波管の内部には、電気インパルスが導波管に加えられたときに、その全長に沿って磁場を生成することができる導体があります(図10)。 結果として生じる磁場は永久磁石の磁場に追加され、結果として生じる磁場は、導波管を含むチャネルの回転モーメントを作成します(ワイデマン効果)。 回転パルスは、チャネル材料の音速でチャネルに沿って両方向に伝播します。 電気インパルスの送信と回転インパルスの受信の間の時間遅延の登録は、永久磁石までの距離を決定することを可能にします。 その位置を決定します。 チャネルは非常に長く(最大数メートル)、磁石の位置は数マイクロメートルの精度で決定できます。 磁歪センサーは、優れた再現性、分解能、悪条件に対する耐性、および温度変化に対する低い感度を備えています。
米。 10.磁歪変位センサー。
1.9 電位差変位センサー
このタイプのセンサーは、基本的にポテンショメーターを含む電気回路を備えています(図11)。 物体の直線運動は、ポテンショメータの抵抗の変化につながります( 可変抵抗器)。 直流電流がポテンショメータを通過する場合、その両端の電圧降下は抵抗値に比例し、その結果、対象のオブジェクトの線形変位の大きさに比例します。
米。 11.電位差変位センサー。
機械的変位センサーに加えて、電位差センサーはその単純さと低コストのために最も広く使用されていますが、光学効果に基づくセンサーは、普遍的で正確な非接触測定にますます使用されています。
自動化システムや情報測定機器を運用する場合、さまざまな測定・分析が必要になります 物理量。 多くの場合、それらをさらに処理するのに便利な形と形にする必要がありますが、直接の知覚には適していません。 センサーはこの目的で使用されます。
センサーは、あるタイプの制御値を別のタイプの値に変換する要素であり、自動制御システムの操作器官に影響を与えるのにより便利です。 電気センサーでは、入力での制御された(多くの場合非電気的)パラメーターの変化により、出力の電気的パラメーターに特定の変化が生じ、これにより、電流またはEMFの変化(スイッチング)が発生します。 電子回路センサーの出力で。 したがって、センサーは通常、電気機器と呼ばれます。
制御値のタイプに応じて、センサーは区別されます:線形または角度の機械的変位、速度、加速度、トルク、温度、圧力など。
センサーは2つの大きなグループに分けられます。
パッシブ、またはパラメトリック。
アクティブ、またはジェネレータ。
最初のグループには、出力で電気信号を独立して作成できないセンサーが含まれます。 制御値の作用下にあるセンサーは、内部パラメーターのみを変更し、最終的に出力信号を変更します。 アクティブセンサーは外部電源を必要としません。センサー自体は、測定値の影響下で、通常はEMFの形式で電気信号を生成します。
既存の構造の概要
動作パラメータと計測パラメータが改善された線形変位センサー(DLS)のさまざまな設計変更の中で、分散型磁気システムに基づくDLSは幅広い機能で際立っています。 このクラスのDLPの中で最も普及しているのは、差動センサーです。 トランスタイプ、そのプロパティは通常、いくつかの特性を使用して評価されます。
1.実際の変換関数と計算された変換関数の間の対応の程度。これは、ゲインKiに対する非線形性の比率によって特徴付けることができます。 為に 線形センサー高精度の場合、出力特性の非線形性は0.1〜0.2%を超えてはなりません。
2.励起電圧に対する出力電圧の位相シフトは、DLPの可動部分が移動したときの位相シフトの変化です。
3.DLP感度。 固定励起電圧では、出力特性の傾きの接線として定義されます。
上記に加えて 重要なパラメータ DLPの適用分野に応じて、可動部品にかかる反力の値、全体の寸法と重量、特性の再現性、信頼性、エネルギー強度などもあります。
センサーの出力パラメーターYの入力値Xへの依存性は、センサーの主な特性です。 センサーのタイプに応じて、線形または非線形になります。
入力の増分に対する出力値の増分の比率は、センサーの感度と呼ばれます。
過渡プロセスの期間によって、センサーの速度が決まります。 通常、最大の感度と速度の要件はセンサーに課せられます。 さらに、主な要件の1つは、センサーのパラメーターと特性が、時間の経過とともに、動作条件(温度、圧力、湿度、センサーの位置など)が変化したときに安定した状態を維持することです。
現在、エアヨーク差動トランス(ADT)が広く使用されています。 このトランスの磁気回路では、コアのみが強磁性体でできており、ヨークがないか、風通しが良いです。
磁気伝導性ヨークがないため、出力特性の直線性が大幅に向上し、「ソレノイド効果」が大幅に低下するため、差動トランスは計装に広く使用されています。
図1に示す3コイル差動トランスが最も優れた特性を備えています。センサーは、外部磁気回路1、可動コア2、および励起巻線3と作動巻線セクション(RO)4が配置されたコイルで構成されています。逆に直列に接続されています。
センサーの励起巻線が電源から電力を供給されている場合 交流電流コアの中央位置である、コアの両側にある作動巻線のセクションに誘導されるEMFは、大きさが等しく、位相が逆です。 したがって、結果として生じるEMFと出力電圧は最小になります。 コアが中央位置からずれると、平衡が乱れ、出力電圧が上昇します。
出力電圧の急峻さと直線性は、巻線間の電磁接続の均一性によって決定されます。これは、励起巻線上の動作巻線のセクションの均一な分布と、これらの巻線の巻数の比率によって保証されます。芯。
センサーの既存の設計の分析から、LDTタイプ(線形差動変圧器)のセンサーの設計(図12)は、他の設計では必要な全体的な寸法が提供されないため、設計の基礎として使用できることがわかります。 。 さらに、このタイプのセンサーは、比較的単純な設計、高い信頼性、およびパラメーターの安定性を特徴としています。
センサーは、エアヨークを備えた線形差動変圧器(LDT)です。 センサーは、本体1、磁気回路2、コイル3、ガラス4で構成されています。 配線図センサーを図1に示します。 13.13。
米。 12.3コイル差動トランス。
米。 13.LDTセンサーの電気回路。
本体は壁厚1mmの中空円筒です。 初期データの要件と外部の影響要因に対する耐性を確保するために、非磁性パイプ(鋼12X18PI10T)で作られています。
センサーが消費する電力を減らし、パラメーターへの外部磁場の影響を減らすために、外部磁気回路がケースの内側に配置されています。これは、厚さ0.35mmの強磁性材料のチューブです。 合金79NMは透磁率の点で他の軟磁性材料より劣っていますが、高い比 電気抵抗そしてmの周波数への小さな依存性。 また、磁歪が低く、強制力も低いです。 材料の粘度と可塑性は、磁気コアを製造するための進歩的な方法(延伸、スタンピング、曲げなど)を使用することによって保証されます。
コイルはフェノールプラスチック製のフレームで構成されており、その上にOBの一次巻線(励起巻線)と二次巻線P01およびP02の2つのセクション(作動巻線のセクション)が配置されています。 作動巻線は反対方向に直列に接続されています。 巻線の結論は、ブロックの花びらにはんだ付けされ、次に 取付線持ち出す。 ガラスは非磁性鋼製の中空シリンダーで、その中に可動部分が保証されたクリアランスで配置されています。
センサーの可動部分は、磁気的に柔らかいプレートから積層されたコアです。 検討中のセンサーは 新しい種類コア、技術的に完璧で、出力特性の直線性を改善します。 コアは、ロッドが付いた中空のチューブです。 ステンレス鋼の(ロッド)、磁気的に柔らかい材料の薄いプレートで満たされ、不動のための化合物で満たされています。
センサーは差動変圧器タイプに属し、その原理は、コアが移動したときの作動巻線と励起巻線のセクション間の相互インダクタンスの変化に基づいています。 センサーの励起巻線が交流電源から電力を供給され、コアが中間位置(ゼロ位置)にある場合、作動巻線のセクションに誘導されるEMFは大きさが等しく、位相が逆であるため、結果として生じるEMFそして出力電圧は最小です。 コアが中央位置からずれると、平衡が乱れ、出力電圧が上昇します。
出力電圧は、コアの移動量に比例して変化します。 コアがゼロ位置を通過すると、出力電圧の位相が180°変化します。
アクチュエータとセンサーを別々に使用するには、これらのデバイス間の中間リンクが必要です。さらに、供給されるワイヤーの数が増えます。 これにより、可動部品の質量、寸法が増加し、信頼性が低下し、コストが増加します。 そのため、アクチュエータとセンサーは、位置センサー(PL)を内蔵したリニア電磁トランスデューサーと呼ばれる1つのデバイスに統合されています(図14)。
米。 14.電力線の概観。
米。 15.センサーの構造図。
米。 16.アクチュエータの構造スキーム。
電力線は2つで構成されています 基本要素:センサー1とアクチュエーター4を1つのデバイスに結合。 センサーは可動部3、コイル2が配置されたシリンダーです。アクチュエーターはハウジングで構成され、その中に可動アーマチュア5が配置されています。センサーの可動部とアーマチュアはしっかりと接続されており、移動できます。 アンカーはユニットの作業体に接続されており、その動作が測定されます。
制御信号がアクチュエータに適用されると、アーマチュアは左または右に動き始めます。 センサーコイルから交流電圧が除去され、その振幅は可動部分の変位量に比例します。
センサーの構造図を図1に示します。 15。
磁電システムは、技術的課題の要件を最も完全に満たすため、作動要素の設計の基礎として採用されました。 アクチュエータ(以下、コンバータ)の構造図を図1に示します。 16.16。
コンバーターはスチールケース1で構成され、その内面に永久磁石4が接着されています。信頼性を確保するために、磁石はナット3でプレスされています。ケースの内部には、非磁性フレーム7とその上にある巻線 直流 5.アーマチュアは、ブロンズブッシング8、9のハウジング内を自由に移動できます。外部回路とコイルの間の電気接続は、柔軟な導体を使用して実行されます。
アーマチュアによって発生する力を増やし、コンバーターによって消費される電力を減らすために、磁石とアーマチュアの間に追加の磁気回路6が取り付けられています。これは、50НХС強磁性合金で作られた中空シリンダーです。
センサーとコンバーターの巻線を外部回路に接続するために、プラグ2がケースに取り付けられています。
コンバーターの動作原理は、2つの流れの相互作用に基づいています。1つは永久磁石によって作成された分極フローで、もう1つは電機子巻線によって作成された動作フローです。 この相互作用の結果として、電機子は力を発生させ、その大きさは巻線を流れる電流の大きさに比例します。
1.10 誘導変位センサータイプLVDTシリーズSM
線形可変差動変圧器(LVDT)(図17)は、高温、高圧、一定のダイナミクス、または長時間の生産などの過酷な産業環境でのアプリケーションに最適です。
米。 17.誘導変位センサータイプLVDT、SMシリーズ。
仕様 :
公称移動量(Lnom)0-2…200、mm
非線形性、%:0.2または0.3
定格温度範囲、_С:-40 ... + 120(+150)
材質:ニッケルメッキ鋼
保護等級:IP67(IP68)
電源周波数、kHz:2…10
定格電圧(Unom)、V:3
全体の寸法、mm、以下:直径12 x(220-1593)
既存の構造を分析した後、LDT型センサー(線形差動変圧器)の設計を基礎として設計し、このセンサーについて正確に計算を行います。
2.決済部分
2.1 の初期データ計算
1.供給電圧U1= 7 V;
2.供給電圧周波数 f= 2000 Hz;
3.消費電流I1= 0.02A;
4.ゼロ位置での出力電圧の値Umax = 0.7 V;
5.出力特性の急峻さK=0.05mm -1;
6.可動部の作動ストロークlp= 10?10 -3 m;
7.コアの長さlc= 20?10 -3;
8.実効透磁率(50 HXC合金の場合)
10.コアの断面積Sc\ u003d S B \ u003d 7?10 -6 m 2;
11.一次巻線のエッジに沿ったフレーム直径Dk1 = 10?10 -3 m;
12.二次巻線の下のフレームの直径Dk2 = 8?10 -3 m;
13.フレーム直径Dkar=8×10-3m。
2.2 電磁気計算t
一次巻線の誘導抵抗:
一次巻線インダクタンス:
コアの下の一次巻線の巻数:
特性の高い直線性を確保するには、一次巻線のインダクタンスが、動作ストローク全体を通してコアの移動中に一定値である必要があります。 したがって、巻線はフレームの全長にわたってコイル状にしっかりと巻かれている必要があります。 フレームの長さ:
フレームのチークで巻くと、各チークで約1.5mmの長さの非線形巻線が得られます。 この点で、フレームの長さは3mm長くする必要があります。 l k \ u003d43mmを受け入れます。 一次巻線の総巻数:
巻線には、線径d pr \ u003d 0.125 mm、絶縁径d \ u003d0.155mmのPETブランド-155の線を選択します。
1つの層のターン数:
一次巻線層の数:
層の数は整数である必要があり、設計上の理由から、巻線の開始と終了がフレームの1つの頬になるようにする必要があります。 n 1=6層を受け入れます。
一次巻線の指定された巻数:
コアの下の一次巻線の指定された巻数:
インダクタンスの補正値:
一次巻線の総インダクタンス:
一次巻線の有効抵抗:
一次回路インピーダンス:
センサーによって消費される電流:
一次電流密度:
コアが全作動行程の値だけ移動したときの二次巻線セクションの巻数:
レイヤーのターン数:
二次巻線セクションの層数:
巻数は整数で偶数でなければなりません。 n 2 \u003d8を受け入れます。
二次巻線部の巻数:
二次巻線セクションの有効抵抗:
二次巻線セクションのインダクタンス:
二次巻線の総インダクタンス:
センサーコイル外径:
可動部分のゼロ位置にある作動巻線の端子の電圧:
2.3熱設計
電気機器の通電部分に電流が流れると、損失が発生します 電気エネルギー熱の形で。 一般に 熱エネルギー装置の温度を上げるために費やされ、環境中に部分的に放散されます。
温度が上がると、 加速劣化導体の絶縁とその機械的強度の低下。 たとえば、公称値をわずか8°C上回る連続温度の上昇による絶縁の耐用年数は半分になります。 したがって、すべての可能な動作モードで、それらの温度は、装置の指定された動作期間が保証されるような値を超えてはなりません。
センサーコイルの温度上昇を計算します。
Newton-Richmannの法則によれば、コイルの温度上昇は次のように定義されます。
このセンサーのコイルはクラスAの絶縁体を使用しています。 許容温度加熱u\u003d 105 _ C;
105 _ C巻線の温度でのアクティブ抵抗:
興奮:
労働者:
一次巻線と二次巻線の回路のインピーダンス:
一次巻線と二次巻線で放出される電力:
総電力:
コイル冷却面:
コイル加熱:
安定した表面温度:
それらの。 温度は、この絶縁クラスの許容範囲を超えません。
結論 :電磁気および熱計算中に得られたデータに基づいて、得られたパラメータはこのタイプのセンサーに受け入れられると言えます。 指定された要件を満たしているため、コース設計の次の段階に進むことができます。
3. パラメータの決定と特性の構築
図18。 特性評価のための実験室スタンド
3.1 線形変位センサーLDTの出力電圧特性の非線形性の決定
センサー負荷抵抗10kOhm:
センサーの動作範囲:±30mm;
「+」-センサーに向かうロッドの動き。
「-」-センサー内のロッドの動き。
LDT-3522センサーの出力電圧のポイントでの変位への依存性が決定されます。
30; -25; -20; -15; -10; -5; 0; 5; 10; 15; 20; 25; 30 mm
測定結果を表1に示します。
表1.実験データ。
特性の非線形性(図19)は、次の式で計算されます。
ここで、Uiは、表Vに示されているポイントで測定された電圧です。
li-表に示されているポイント、mm;
Kは、動作範囲の終わりでの出力電圧特性の急峻さです。 lk =30mm-動作範囲。
1点の計算例:
係数 に次の式に従って、正と負の側で別々に計算されます。
どこ U 出口 - 動作範囲の終わりの電圧。
米。 19.センサーを動かすときの特性の非線形性
3.2 センサー出力特性
センサーの出力特性は、出力電圧の可動部分の位置への依存性であり、次の式で表されます。Uout = f(l i)は、実験から得られたデータに基づいて作成されます(図20)。
米。 20.センサーの出力特性。
3.3 出力勾配グラフ
米。 21.センサーの動きに対する出力特性の急峻度係数のグラフィカルな依存性。
3.4 荷重特性の構築
負荷特性は、センサーの出力電圧がわずかに変化するように負荷を変更できる限界を決定するために必要です。
荷重特性は、次の式で表されます。Uout \ u003d f(R n)(図22)。
表2
|
電圧UBbIX、V |
米。 22.負荷特性。
結論: 線形変位センサーのパラメーターと特性を研究した結果、4つの異なる特性が構築されました。 これらの特性のグラフは、センサーロッドがゼロ位置に近づくにつれて特性の非線形性が減少することを示しています。 出力特性は線形ではなく、その最小値はステムのゼロ位置からシフトしています。 このような結果は、巻線間の電磁接続の不均一性によって説明できます。その原因は、励起巻線の上の作動巻線のセクションの不均一な分布と、コアの下のこれらの巻線の巻数の比率である可能性があります。
負荷特性は、負荷が2から10kΩに変化するとUoutがわずかに変化し、この変化が非線形であることを示しています。これは、低負荷で大電流が流れるときのコア飽和によって説明されます。
結論
このコースプロジェクトでは、線形変位センサーの例を使用して非接触デバイスを設計しました。 コースプロジェクトでは、機能をよりよく理解し、吸収することができます 電磁センサー、線形変圧器センサーの計算と設計のスキルを習得し、それらの動作モードを研究します。 コースプロジェクトでは、電磁気と熱の計算が行われ、パラメータの選択も行われました。 特性の非線形性を決定し、出力特性の傾き係数を計算し、出力特性と負荷特性を構築します。
線形変位センサーの設計されたアナログは、タスクで設定されたすべての要件を満たします。
参考文献
1.ボグダノフE.P. 専門分野18020の学生のための分野「非接触電気機器」に関する実験室ワークショップ-「電気および電子機器」-トムスク:TPU出版社、2003年-58年代。
2.ボグダノフE.P. トピックに関する分野でのコースプロジェクトの実施のためのガイドライン:専門分野18020の学生のための「非接触電気機器」-「電気および電子機器」-トムスク:TPU Publishing House、2003年。-20代。
3. Bul B.K. 電気機器の理論の基礎。 -M .: 大学院, 1970.
4.クリコフスキーL.F.、ザリポフM.F. 分散パラメータを備えた誘導変位トランスデューサ。 -M .:エネルギー、1966年。
5.マタリンA.A. エンジニアリング技術。 --L。:Mashinostroenie、1985年。
6. Savchenko M.G.、Filippov V.I.、Maryanov G.M. 電源および電気駆動装置の設計。 -M .:エネルギー、1973年。
7.チュニキンA.A. 電気機器。 -M .: Energoatomizdat、1988年。
8.電子および電気機械システムおよびデバイス:土曜日。 科学的 Proceedings、SPC "Polyus"、トムスク、1997年。
Allbest.ruでホスト
同様の文書
ホール効果に基づく、容量性、光学的、誘導性、渦電流、超音波、磁気抵抗、磁歪、電位差測定など、さまざまなタイプの変位センサーの設計と動作原理。 デバイスの使用分野。
要約、2015年6月6日追加
電磁流量計センサーの機能図の開発と選択。 アナログの形成と研究、 デジタル回路。 デバイスの電源の計算。 作業のアルゴリズムを開発するための手順と ソフトウェアマイクロコントローラー。
タームペーパー、2012年8月19日追加
変位トランスデューサを備えた測定チャネルのプロジェクト-位置と速度の座標に関して作業体の運動パラメータを制御する回転光電センサーのコード。 コンバーターのビットグリッドの計算。
実験室作業、2012年4月4日追加
ロボット移動装置の回転を制御するシステムの開発。 マイクロプロセッサ、増幅器、電磁弁、油圧シリンダの伝達関数の選択と計算。 センサー計算 フィードバックシステムの安定性。
タームペーパー、2013年10月20日追加
電位差センサーの概念と機能的特徴、それらの種類と特徴的な特徴、操作の目的と原理。 線形、可逆的、機能的な電位差センサーの静的および動的特性。
プレゼンテーション、2011年12月24日追加
線形加速度センサーの技術的特性と動作原理の説明。 技術的なスケッチの実証。 デバイス、変位センサーの静的および動的パラメーターの計算。 エラーソースの分析と 可能な方法彼らの衰退。
テスト、2013年5月21日追加
一次測定情報を取得するためのデバイスの設計に使用される物理現象と影響の分類。 弾性要素の種類。 圧力センサーと一次測定トランスデューサーの高感度要素の計算。
タームペーパー、2012年4月16日追加
ポテンショメータの動作の目的と原理。 スライダーの動きに対する出力電圧の依存性。 電位差センサーの電気回路。 ロードされたポテンショメータの静的特性。 それらの包含の可逆的および非可逆的タイプ。
プレゼンテーション、2016年5月10日追加
主要 仕様規制システム。 マイクロプロセッサ、ロボットグリッパー、油圧ドライブ、減速機、モーター、圧力センサー、線形変位、オペアンプの選択。 離散システムの安定性の決定。
タームペーパー、2013年10月20日追加
距離センサーとタッチセンサーを開発するためのシーケンスと方法論。 校正済みセンサーおよび例示的な機器(マイクロメーターまたはダイヤルインジケーターICh-25)の動作原理。 検証されたセンサーの読み取り値の比率。 測定結果の処理。
線形変位センサーにはいくつかの分類レベルがありますが、主なものは動作原理であり、デバイスの機能目的と範囲を決定します。
動作原理によれば、変位を監視および測定するためのデバイスは、次のように分類できます。
- 容量性。
- 光学(オプトエレクトロニクス)。
- 誘導。
- 磁歪センサー。
- 超音波。
- 抵抗性、磁気抵抗性、電位差測定。
- 日常生活でホール効果を利用する装置は、実際には使用されていません。
家庭で セキュリティシステムアクセスおよび移動制御デバイスでは、センサーの最初の4つのグループが主に使用されます。
センサーの範囲
動作原理に関係なく、モーションセンサーは線形運動をデジタルまたは アナログ信号、次に電子測定またはトリガーユニットに送られます。 測定精度は動作原理により異なります。
多くの場合、特定の変位量を測定する必要はありません。たとえば、セキュリティシステムでは、制御ゾーン内の動きの存在を判断するのは非常に簡単です。 これらのデバイスはモーションセンサーと呼ばれます。 高い測定精度は必要ありません。 したがって、ここでは安価な容量性、光、または誘導性デバイスが最も一般的です。
自動制御の工業生産システムでは、変位量を測定する必要があります。 さらに、測定(たとえば、数値制御を備えた工作機械)は、高精度で実行する必要があり、一定の時間間隔で連続的または離散的に実行されます。 この場合、磁歪装置が最も広く使用されています。

静電容量センサー
最も単純な静電容量センサーは、設計がコンデンサーに似ています。 制御対象オブジェクトが移動すると、その容量は次のように変化する可能性があります。
- プレート間のギャップのサイズの変更。
- プレートの相互位置の変化、およびこの結果として、相互オーバーラップのゾーンの増加(減少)。
- 変更点 誘電率絶縁層。
デバイスの静電容量が変化すると、この値自体がに送信される信号として機能します。 電子ブロック制御し、パルスジェネレータを含めることができます。パルスジェネレータは、さらに処理しやすくなります。

最も普及している容量性運動制御デバイスは、次のことを発見しました。
- 液体または粉末製品によるタンクの充填を監視するためのシステムの信号源として。
- ロボットシステムおよび自動機械およびラインの執行機関の作業ストロークの開始-終了を制御するデバイスとして。
- さまざまなオブジェクトの配置に。
- 通常の近接スイッチのように。
- 「プレゼンスセンサー」としての制御およびセキュリティ警報システム。
それらの低コストと信頼性のために、容量性デバイスは、スマートホームライフサポートコンプレックスの個々のシステムで最も広い分布を見つけました。
異なる動作原理を使用するデバイスと比較した場合の利点は次のとおりです。
- 安価で広く使用されている材料を使用した、簡素化された大量生産技術。
- 低消費電力で高感度。
- コンパクトなサイズと軽量。
- 耐久性、シンプルさ、操作の信頼性。
- さまざまな問題を解決するためのデバイスの適応の容易さと、任意の設計への埋め込みの可能性。
高精度制御システムでの普及を妨げる主な要因は次のとおりです。
- コンバージョン率が比較的低い。
- センサー要素を注意深くシールドする必要があります。
- 50.0ヘルツの工業用周波数と比較してより高い周波数でのデバイスの精度を向上させます。
- 大気条件が変化した場合(雪、雨)、誤警報の可能性が高くなります。これには、信号源の保護を強化する必要があります。
誘導センサー
シグナルイン 誘導センサーコイルのインダクタンスを変えることによって形成されます。 このタイプのデバイスは、精度が高く、寸法が小さいという特徴があります。 誘導制御装置はリモートで測定を行うことができ、タイプごとに単純なものと差動のものに分けられます。
これらのデバイスの設計の1つは変圧器であり、そのコアは移動する機能を備えています。 コアが移動すると、コイルのインダクタンスが変化し、この変化が信号になります。 インダクタンスの値は、コアの変位レベルに比例して変化します。
フェリ磁性体に対して移動制御を行う場合は、コアは不要です。コイルの電磁放射の場に入る部品は、そのインダクタンスを変化させ、制御信号を形成します。
誘導型の制御センサーは、プログラム制御、非接触セキュリティシステムを備えた工作機械、および実際の動きの測定に広く使用されており、 デジタルスケールまたは液晶ディスプレイの画面に情報を出力します。
光学および光電子運動制御装置
本質的に従来の光学(レーザー)距離計である光学三角測量器は、モーションコントロールと距離測定のために最大の分布を受けています。 線形量の小さな変化を制御するために、偏光格子を備えたデバイスが使用されます。 さらに、光学センサーは「ビームバリア」としてセキュリティシステムで広く使用されています。
このカテゴリのデバイスの利点は次のとおりです。
- 非接触制御の実装。
- 高精度。
- 制御信号のほぼ瞬時の形成(応答時間の遅延なし)。
高精度光学センサーの欠点は次のとおりです。
- かなりのコスト。
- 条件に対する重要度 環境.
さまざまな種類のデバイスのメーカー
ロシア最大のモーションコントロールデバイスメーカーはELTECH社(サンクトペテルブルク)で、誘導型、抵抗型、容量型の線形変位の大きさを監視および測定するためのデバイスを専門としています。
Longfellow-2およびDuraStarモデルラインの線形ポテンショメータは、0.5%の精度で最大610.0ミリメートルの変位の測定を提供します。 デバイスのコストは、測定範囲(モデル)と供給範囲によって異なり、注文時に交渉されます。

最近、安価ですが、かなり正確な中国製の楽器が非常に人気があります。
最も一般的なのは次のモデルです。
- DEPPEP15シリーズ-工作機械や自動制御システムで使用される誘導型デバイス。
- 光学機器「HENGXIAK100シリーズ」 50.0〜7200.0ミリメートルの範囲で寸法を制御できます。
- リニアエンコーダ「RoundsRlc50d」実際、これは電子巻尺であり、寸法を高精度で測定し、移動距離を制御することができます。
中国製品の価格はルーブルの為替レートによって異なり、注文時に指定されます。
日曜大工の動き制御装置
変位の大きさを自分で測定する装置を作ることは事実上不可能です。ただし、アマチュア無線は、セキュリティおよび生命維持システムで正常に使用されている、故障した無線および電子機器からモーションセンサーを組み立てることがよくあります。
たとえば、センサーを使用して、人がトイレに入るときにトイレのライトをオンにすることができます。 住宅地の照明をオン/オフするためのそのようなデバイスはそれほど人気がありません。
そしてもちろん、これらのデバイスは、保護されたオブジェクト(庭の区画、バルコニー、ガレージ)の領域への不正侵入の試み(人または動物)を記録する独自のセキュリティシステムの形成に不可欠です。 。 組み立て例を使って自家製のモーションセンサーの製造を考えてみましょう オプトエレクトロニクスデバイス、保護された境界の交差を制御します。
デバイス自体を製造するための部品のうち、次のものが必要になります。
- からの電源 携帯電話 5.0ボルトの入力電圧で。
- フォトセルはフォトレジスタよりも優れています。
- 「p-n-p」遷移を備えたバイポーラトランジスタ。
- 調整範囲が0〜10.0キロオームの建設用ポテンショメータ(抵抗)。
- 5.0ボルトの電圧で作動する電磁リレー。
- レーザーポインターは放射線源として理想的で、細くて細いビームを発します。
回路の接続順序は次のとおりです。
- フォトセルのカソードは、電源の正極にはんだ付けされています。このポイントは、共通の(質量)導体になります。
- 口語的なポテンショメータは、そのスライダーが中央の位置にあるときに、フォトセルのアノードに接続されます。
- ポテンショメータの自由接点は電源の負の導体にはんだ付けされ、そのエンジンからトランジスタのベースへの接点がはんだ付けされています。
- トランジスタのエミッタがオンになり、回路の共通の「プラス」に接続され、コレクタがリレー接点の1つに接続されます。
- リレーの2番目の接点は、電源のマイナス線にはんだ付けされています。
フォトセルの窓がレーザーポインターで照らされている場合、ポテンショメータースライダーを回すことにより、リレーの信頼性の高い動作が実現されます。 任意の信号源をリレーのスイッチング接点に接続できます-ハウラー、白熱灯、 LEDインジケータ。 このデバイスの欠点は、光線が交差するときにのみ機能することです。
つまり、スタンバイモードでは、そのすべての要素が機能します。 リレー接点を切り替えるさまざまな方法で、ビームの最初の交差点でライトをオンにし、それが繰り返されるときにオフにすることができます。
一体型ホールセンサーは、機械工学、自動車用電子機器、航空技術など、現代の産業の多くの分野で使用されています。 機械的および光学的センサーとは異なり、ホールセンサーには重要な利点があります。ホールセンサーは、機械的な影響や環境パラメーターの変化にほとんど影響を受けず、完成したソリューションのコストを最小限に抑えます。
序章
最も普及しているのは、いわゆるキーホールセンサー(マイクロ回路)であり、磁場の強さが特定の値を超えると、その出力が論理状態を変更します。 このようなセンサーは、特に、電気モーターシャフト、歯車、コンベヤーベルトなどの移動物体の回転速度と変位を測定するために使用されます。ただし、ホール要素を備えた別のクラスの集積回路があり、従来のアプリケーション領域でシステムを構築する際に、スコープを設定するか、開発者に柔軟性を与えます。 いわゆるリニアホールセンサーについて話しています。 この記事では、これらのデバイスの主な特性とアプリケーションについて検討します。
リニアホールセンサーの構造と主な特性
リニアホールセンサー(HLS)は通常、単極または双極磁場の大きさを測定するように最適化されています。 LDHは、2つの主要なパラメータ、つまり特定の動作温度範囲での感度と直線性によって特徴付けられます。
LDHの代表的な伝達特性(出力電圧の磁場振幅への依存性)を図1に示します。 1.ほとんどの単電源センサーは、出力電圧範囲の半分または供給電圧の半分に等しい出力ゼロ電圧(ゼロ磁場強度に対応)を持っています。 後者の場合、ゼロ電圧値と感度は供給電圧値に依存します。 これは、線形増幅器を備えたホール素子である比例出力を備えたセンサーで観察されます(図2)。 したがって、電源電圧が+5.0 Vの一般的なA3515センサーの場合、ゼロ電圧と感度はそれぞれ2.5Vと5.0mV /ガウスであり、電源を5.5 Vに上げると、これらのパラメーターは2.75Vに変化します。 5.5mV/ガウス。 そのため、このタイプのLDHを使用する場合は、電源にさらに厳しい要件を課す必要があります。 同時に、センサーは追加の増幅コンポーネントなしで簡単な感度調整を可能にし、これは非常に便利です。

最新のLDHはモノリシック集積回路であり、ホール素子、線形増幅器、およびクラスAの最終電力増幅段が1つのチップに組み合わされています(図3)。 さらに、変換精度を高め、温度安定性を確保するために、マイクロ回路は自動バイアス電圧補正システムと線形増幅器の後に信号フィルタリングを実装しています。


表1は、AllegroMicrosystemsの新しいリニアホールセンサーの範囲を示しています。 センサーA1301、A1302は図1に示す回路を持っています。 3.精度の値が低く、たとえば、オブジェクトの角度または線形変位を登録するシステムで使用できます。 電流の方向に応じた抵抗勾配の不均衡、幾何学的不均一性、ピエゾ抵抗効果、さらにはマイクロ回路パッケージへの外部の機械的影響など、多くの要因が1つのホール要素を持つLDHの特性の精度と安定性に影響を与える可能性があります。 LDHの精度に対するこれらの要因の影響を排除するために、動的直交オフセット補償のスキームが使用されます。 その動作原理を図1に示します。 4. 2方向(0°と90°)からのホール素子の電流は、約200 kHzの周波数で差動増幅器の入力に交互に切り替えられ、素子の「電子回転」を90°実行します。 同時に、「ターン」の時点で、サンプルホールド回路がアンプの出力の電圧を固定し、スイッチングノイズを排除します。 最後に、信号は完全に回復するためにローパスフィルターを通過します。 動的直交補償回路により、外部の不安定要因の影響をほぼ完全に排除し、出力バイアス電圧の高い安定性を実現できます。 この回路の欠点には、スイッチング周波数帯域F comの出力信号のスペクトルにノイズが存在することが含まれます。これにより、センサー出力信号の最大周波数が通常0.1〜0.2Fcomに等しい値に制限されます。

説明されているオフセット補償原理は、A1321〜A1323センサーで使用されます(図5)。 これらの製品は、精密に校正されたLDHのクラスに属し、-40〜+150°Cの温度範囲で変換の高精度と直線性を保持します。 ただし、上記のように、動的オフセット補償回路により、センサーの出力でノイズが増加します。 したがって、線形センサーA1301、A1302の場合、10 kHz帯域の出力ノイズの振幅が150μVを超えない場合、A1321-A1323の場合、この値はすでに2桁高く、約25mVです。 したがって、2.5 mV /ガウスの同じ変換係数で、A1301の最小記録磁場値の分解能は0.06ガウスであり、A1323の場合は10ガウスです。

LDH変換係数をスケーリングするために供給電圧調整を使用すると、回路設計に多くの複雑さが生じます。 第一に、電源電圧の安定性に対する要求が急激に高まっています。 第二に、供給電圧のリップルとノイズがセンサーの出力信号を直接変調し、測定精度に影響を与えます。これには複雑なフィルタリングの使用が必要であり、これは回路がはるかに高価になることを意味します。 新世代のA1391、A1392のセンサーには、このような欠点はありません(図6)。 これらのICには、ゼロレベルと変換係数を設定するために使用できる個別のVREFスケーリング基準電圧入力があります。 この場合、回路は約60dBの供給電圧でノイズの抑制の深さを提供します。 バイアスの安定化はA1321〜A1323と同様に実行されますが、ノイズの振幅が20%減少します。

A1391およびA1392センサーには、SLEEP入力で電子シャットダウンモードがあります。 この入力に論理ゼロが適用されると、マイクロ回路は低電力モード(25 µA未満)になり、センサー出力は高インピーダンスの3番目の状態になります。 これにより、センサーのグループを出力によって並列に組み合わせ、マルチプレクサーを内蔵していない単一のADCを使用できます(図7)。 センサーは、対応するマイクロ回路のSLEEP入力に論理ユニット信号を発行することにより、外部マイクロプロセッサによってポーリングできます。

LDHの応用
線形ホールセンサーの適用分野の中で、最も一般的な2つのセンサーを区別する必要があります。 これらは、線形または角変位を測定し、測定するためのデバイスです 電流.
線形または角変位の測定
ほとんどのアプリケーションでは、物体の動きを測定するために、LDHが永久磁石と組み合わせて使用されます。 これは、最大の直線性を維持するために、LDHと移動物体の基準点との間の距離を変更するときに、磁場に大きな変化を与える必要があるという事実によるものです。 永久磁石は、SaCoやAlNiCoなど、可能な限り高い電界強度で選択する必要があります。
物体の変位を測定するシステムでは、永久磁石とLDHの相対位置にいくつかのオプションがあります。 最も簡単な方法は、磁力線がセンサーと90°の角度で交差するように、LDHと磁石を同じ軸上に線形に配置することです。 この配置では、LDHの出力電圧とそれと磁石の間の距離の間に非常に非線形の関係があります(図8)。 変位が比較的小さい場合、線形性からの偏差は小さく、追加の線形化を回避できます。 それ以外の場合は、距離-電圧特性に追加の線形化スキームを使用する必要があります。

2番目のオプションは、LDHと磁石の位置です。 平行平面。 この方向では、システムにはゼロフィールドポイントがあり、出力電圧の符号に従って移動方向に関する追加情報を取得できます(たとえば、右に-電圧の増加、左に-減少(図9))。 図からわかるように。 図9に示すように、ゼロ変位点に対する中央領域は高い直線性を有し、これは、ポテンショメータ、空気補正器(空気圧弁)、スロットル位置センサーなどの用途で首尾よく使用することができる。ゼロ点付近での磁場強度の大きな振幅変化に伴い、LDHの出力電圧にも大きな振幅があり、後続の信号処理が簡素化されます。

3番目のオプションは、2つの相補的な磁石の間のLDHの位置です(図10)。 2つの磁石システムの相補的な磁場は、高い勾配で良好な線形性を提供します。 このシステムにはゼロ移動ポイントもあり、移動方向に関する情報を得ることができます。 説明されているオプションの欠点は、そのようなシステムでの移動範囲がかなり狭いことであり、その範囲が制限されます。

考慮されるオプションのほとんどは、出力信号の距離への依存性をある程度線形化する必要があります。 開発中のデバイスが後続のデジタル制御を提供する場合、これはADCとマイクロコントローラーを使用して実装できます。 結果が距離に線形に依存するアナログ信号である場合、線形化プロセスは、Anadigmフィールドプログラマブルアナログ集積回路(PAIS)を使用して簡単に実装できます。 この場合、変換関数の実験的な依存関係を一度削除して、係数のテーブルの形式で開発環境に入力するだけで十分です。 線形化に加えて、必要に応じて、追加の信号処理(増幅、フィルタリング、ゼロ検出など)をPAISに実装できます。
電流測定
存在する たくさんの電流を測定する方法ですが、大量生産品の製造に広く使用されているのはそのうちの3つだけです。 これは抵抗方式、変圧器センサー、ホール効果電流センサーです。 抵抗方式は最も単純で最も経済的ですが、抵抗での大きな電力損失や、測定回路と測定回路間のガルバニック絶縁の欠如など、重大な欠点があります。 さらに、巻線抵抗器には大きなインダクタンスがあるため、パルス電流やRF電流を測定する回路で使用することはできません。 強力な非誘導性厚膜抵抗器を使用すると、この方法の経済的効果がゼロになります。 変流器の使用ははるかに高価なソリューションであり、限られた周波数帯域でAC電流を測定する場合にのみ可能です。
ホール効果電流センサーは、上記のタイプの中間の価格で位置します。 それらの主な利点は、導通損失がなく、直流と交流の両方を測定できることです。 さらに、ホール素子は電流回路から絶縁されており、自動的にガルバニック絶縁を提供します。 必要 外部電源ほとんどの場合、センサーは端末デバイスではなく、その後も電源を必要とする他の回路コンポーネントが存在するため、重大な欠点とは言えません。
LDHで測定される磁界誘導の値の範囲は限られているため、設計を選択する際には、センサーの磁気回路の構成を正しく決定する必要があります。 電流源によって生成される電界強度は、LDH測定範囲に対応している必要があります。
数十から数千アンペアの電流を測定する場合、追加の磁気回路を使用せずに、ホールセンサーを導体の近くに配置できます。 為に 既存のタイプセンサーの場合、測定範囲の中央で約100ガウスの磁界誘導の値が最適であると見なすことができます。 これにより、出力ノイズのレベルに関してセンサーの許容可能な感度が提供されます。 電流で導体によって生成される磁場誘導は、よく知られている式(SIシステムで)によって推定できます。
ここで、rは導体の中心とホールセンサーチップの間の距離です(図11)。 導体に対するLDHの位置を選択するときは、磁場の線がセンサーの平面と直角に交差するときに最高の感度が達成されることを考慮に入れる必要があります。 この方法には、外部の磁場源が電流センサーの読み取りに影響を与えるという欠点があります。

感度を上げ、外部からの影響を減らすことができます トロイダル磁気回路精密に校正されたLDHタイプA1321〜A1323のマイクロ回路が取り付けられたギャップがあります(図12)。 この場合、フィールド全体がギャップに集中し、外部からの影響はほとんどありません。 ギャップの誘導は、次の関係から推定できます。

説明されている電流測定の原理は、ACSファミリのAllegro Microsystemsモジュラーセンサーに実装されています(図13、表2)。


図に示すデザイン。 12では小電流の測定はできません。 これは、出力ノイズに関するLDHの感度の制限によるものです。 したがって、A1323マイクロ回路を使用する場合、10 kHz帯域のノイズによって制限される磁気誘導分解能は、10ガウス、つまり約1.5 Aです。2つのオプションがあります。線形補償なし増幅器でLDHを使用するか、マルチを使用します。 -ターンデザイン(図14)。 最初のケースでは、上記のように、感度は0.06ガウス、つまり約10mAに増加します。 マルチターン設計でこの感度を達成するには、150ターン以上が必要であり、インダクタンスが急激に増加し、許容できない場合があります。 したがって、それぞれで 特定のケースセンサーの解像度と帯域幅の間にはトレードオフがあります。 たとえば、LDHA1323の出力で最も単純なRCローパスフィルターを使用して周波数帯域を1kHzに制限すると、分解能が0.1Aに増加します。

結論
LDCの最も一般的な2つのアプリケーションを検討しました。これにより、自動制御システム、電源、およびコンバーター技術の機器の設計におけるさまざまな問題の解決を大幅に簡素化できます。 この資料が、開発者が1つまたは別の技術ソリューションを選択する際に役立つことを願っています。
文学
- プログラム可能なアナログ集積回路に関する一連の記事Anadigm//コンポーネントとテクノロジー。 2005年。#1–9。