ソフトスターター:動作の目的と原理
デバイスの効率的な使用 ソフトスタート(UPP)は、タイプレーティングが正しく選択されている場合にのみ可能です。 キーの選択基準は通常、モーター負荷のタイプ、始動の頻度、および銘板データです。
デバイスの起動特性は互いに大幅に異なる可能性があり、それらの値は解決されるタスクの範囲によって異なります。 そのため、非同期モーター用のソフトスターターを選択する場合、その将来のアプリケーションの範囲を考慮することが非常に重要です。
始動特性は大きく3つのカテゴリーに分けられます。
ソフトスターターの動作モード
通常モードは、3.5 x Inomのレベルでの開始電流の値によって制限され、開始時間は10〜20秒です。
ヘビーデューティーは、慣性モーメントがわずかに高い負荷が特徴です。 始動電流は4.5xI nomに制限されており、加速時間は30秒です。
非常に重いデューティは、非常に高い慣性モーメントを意味します。 開始電流は到達します レベル5.5 x I nomであり、加速時間は30秒を大幅に超える可能性があります。
SCPの種類
図式ソフトスターター操作は、次の4つのタイプのいずれかになります。
1. 始動トルクレギュレーター三相非同期モーターの1相のみを制御します。 このタイプの管理は制御することができますが スムーズなスタート、開始電流の減少はありません。
実際、始動トルクレギュレーターを使用する場合、モーター巻線の電流は、直接始動で得られる電流とほぼ等しくなります。 同時に、この電流は直接始動の場合よりも長く巻線を流れるため、モーターが過熱する可能性があります。
このタイプのデバイスは、突入電流を減らす必要があるドライブには使用できません。 (モーターの過熱の危険性があるため)高慣性メカニズムの開始、およびドライブの頻繁な開始/停止を保証することはできません。
2. フィードバック信号のない電圧レギュレータハードコードされたユーザープログラムに従ってのみ機能します。 エンジンからのフィードバックがないため、エンジン速度を変更して、変化する負荷に合わせて調整することはできません。 それ以外の場合は、ソフトスターターに適用されるすべての要件を満たし、モーターのすべてのフェーズを制御できます。 これらはおそらく最も人気があります ソフトスターター。
表1アプリケーションに応じた動作モード
図式エンジン始動は、始動電圧と始動に必要な時間を事前に設定することによって決定されます。 このタイプの多くのデバイスは、突入電流の量を制限することもできます。これは、起動時の電圧を下げることによって実現されます。 もちろん、このようなレギュレーターは、メカニズムの減速を制御して、スムーズで長時間の停止を実行することもできます。
二相レギュレータは三相で電圧を下げることができますが、電流は不均衡です。
3. 信号付き電圧レギュレータ フィードバック 上記のデバイスのアップグレードバージョンです。 彼らは、電流値を読み取り、電流がユーザー定義の制限を超えないように電圧を調整することができます。 また、受信したデータは、さまざまな保護(位相の不均衡、過負荷などに対する)の操作に使用されます。
そのような 非同期モーター用のソフトスターター他の同様のデバイスとグループ化して、単一のモーター制御システムにすることができます。
4. フィードバック信号付きの現在のコントローラー。 これらは最も近代的です ソフトスターター。 図式作業は、以前のモデルのように電圧ではなく、電流強度の調整に基づいています。 これにより、制御精度が向上し、プログラミングが容易になり、デバイスのセットアップが高速になります。結局のところ、ここでのパラメータのほとんどは、手動で入力しなくても自動的に決定されます。
低電圧始動
このような始動の瞬間、モーターを流れる電流は、ローターがスタックしている場合の電流と等しくなります。 このときエンジンは加速し、ある時点で公称値より高くなり、その後公称値になります。 電流とトルクの変化の性質は、特定の各モーターの設計とモデルによって異なります。
異なるモデルのエンジンを始動するプロセスは、同じ特性を持っているが、非常に異なる可能性があることに注意する必要があります。 始動電流は公称値の500%〜700%以内で、トルクは70%〜230%です。
このような特徴は、この種の働きに対する深刻な障害です。 非同期モーター用のソフトスターター。 したがって、最小の始動電流で高い始動トルクを得ることがタスクである場合は、適切なモーターを選択する必要があります。
すでに示したように、モーターの始動トルクは電流強度に2次依存します。
電流の減少を制限する必要があることに注意する必要があります。始動トルクが負荷トルクより小さくなると、加速が停止し、モーターが定格速度に到達しなくなります。
デルタ/ワイスターター
このタイプのスターターが最も一般的なタイプですが ソフトスターター、図三角形/星は、重い負荷の下で作業することを許可しません。
まず、起動時にモーターが「スターに」接続され、トルクと電流の値は公称値の3分の1に等しくなります。 指定された間隔の終わりに、ドライブはオフになり、再びオンになりますが、すでに「ネズミ講」に従っています。
スター加速中に、エンジンがデルタに切り替えるのに十分な速度を得るのに必要なトルクを発生させることができる場合、始動は効果的です。 これが定格速度よりもはるかに遅い速度で発生した場合、そのような始動中の電流は直接始動電流と大きく異ならないため、デバイスを使用しても意味がありません。
爆発的な電流とトルクのサージに加えて、エンジンがデルタ動作に切り替わる瞬間に、他の複雑な過渡プロセスが発生します。 それらの振幅は、スイッチング中にモーターによって生成される電圧の振幅と位相に依存します。
最悪の場合、電圧はネットワークと同じになる可能性がありますが、逆位相になります。 次に、電流は公称値を2回超え、モーメントは上記の式に従って4回超えます。
単巻変圧器を備えたスターター
このようなスターターの設計では、モーターに供給される電圧を下げるために単巻変圧器が使用されます。 始動電流とトルクを段階的に調整するために、特別なタップが使用されます。 モーターシャフトの全回転速度は、定格電圧に移行する瞬間まで達成され、電流サージは最小限に抑えられます。 同時に、規制の段階的な性質により、高い精度を達成することは不可能です。
前のもの(デルタ/スター)とは異なり、単巻変圧器を備えたスターターは、閉じたトランジェントによって特徴付けられます。 これは、モーター加速中のトルクおよび電流曲線にハードトランジェントがないことを意味します。
単巻変圧器の両端の電圧降下により、どのモーター速度でもトルクが減少します。 ドライブの慣性負荷が高い場合、開始時間が許容(安全)制限を超える可能性があり、負荷が変動すると、システムの動作が最適ではなくなります。
単巻変圧器を備えたスターターは、通常、最大3個/時間の始動頻度で使用されます。 、より頻繁な起動またはより強い負荷のために設計されたものは、より大きく、はるかに高価です。
固定子回路に抵抗器を内蔵したスターター
このようなスターターは、液体または金属の抵抗器を使用して、固定子に印加される電圧を低減します。 抵抗を正しく選択することで、このようなデバイスはモーターのトルクと始動電流を大幅に削減します。
抵抗器の正確な選択は、エンジンのすべてのパラメータ、その動作モード、および計画された負荷を考慮して、設計段階で行う必要があります。 ただし、そのような情報が常に利用できるとは限らず、抵抗器の選択が不正確な場合、スターターの品質と信頼性の両方が低いままになります。
このような回路の特徴は、抵抗器の加熱により、動作中に抵抗器の抵抗が変化することです。 過熱の危険性があるため、抵抗器付きのスターターは、高慣性の機械やメカニズムでの作業には使用されません。
非同期モーター用のソフトスターター
ソフトスターター(サイリスタソフトスターター)は、電気モーターのソフトスタート/ストップに使用される最も技術的に進んだ電子機器です。 動作原理は、入力電圧を制御することです。 主なタスクは始動電流とトルクを制御することですが、 ソフトスターター図多くのインターフェース機能を備えており、包括的なエンジン保護も提供します。
SCPの主な機能:
電圧と電流をスムーズかつ無段階に変更する機能。
簡単なプログラムを作成することにより、電流とトルクを制御する機能。
必要となる可能性のあるシステム(コンベヤー、ポンプなど)でのソフトブレーキによるソフトストップ。
システムの特性を変更せずに頻繁に開始および停止することを保証します。
負荷が変化するシステムでもワークフローを最適化します。
SCPを使用すると、次のことが可能になります。
供給ネットワークとHELLの起動時に衝撃電流を排除します。
ADの開始電流を減らします。
IMと駆動機構の両方に対する機械的衝撃の影響を排除します。
血圧への熱的影響を減らします。
血圧を止めるときに過電圧を取り除きます。
トラブルシューティング時間を短縮します。
IMの動作と耐用年数の信頼性を高めるため。
ソフトスターターは サイリスタレギュレータ電圧(TRN)
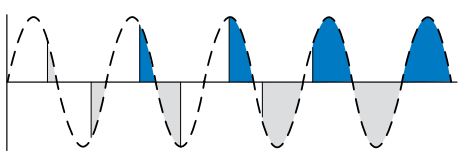
電圧レギュレータでは、2つのサイリスタが各相線に逆平行に接続されています。1つは主電源電圧の正の半サイクルで条件付きで動作し、もう1つは負の半サイクルで動作します。 レギュレータの出力での電圧調整は、3つのサイリスタの1つから別のサイリスタ(ベースポイント)に電流を流さなければならない瞬間に対する各サイリスタのターンオン時間を変更することによって実行されます。サイリスタ。これにより、電圧半サイクルネットワーク中にサイリスタを流れる電流の時間を変更し、負荷(この場合はエンジン)に供給される出力の電圧を変更できます。 この電圧は正弦波ではなく、半サイクル中にサイリスタの持続時間を変更することで変更できる平均電圧として表すことができます。 基点に対するサイリスタのターンオン時間は度で表され、制御角度と呼ばれます。 サイリスタの調整角度を変えることにより、スムーズなエンジン始動に必要な電圧を得ることができます。
起動プロセスの最後に、サイリスタはパーマネントオンモードに移行するか、特別なコンタクタによってシャントすることができます。 バイパスコンタクタを使用すると、デバイスの効率を高め、サイリスタの耐用年数を延ばし、ネットワーク上の半導体素子の影響を排除することができます。
保護機能
サイリスタコンバータデバイス(TCD)は、起動モードと停止モードの制御機能に加えて、IMを保護し、TCRを緊急モードから保護する機能を備えています。 標準機能は次のとおりです。
TPU出力での短絡に対する保護。
始動時のモーターシャフトの詰まりに対する保護。
動作モードでの電流過負荷に対する保護。
TPU入力での許容できない電圧降下に対する保護。
TPU入力での許容できない電圧上昇に対する保護。
相故障保護;
バイパスコンタクタをオンにしないことに対する保護(存在する場合)。
入力電圧不平衡保護;
入力での逆相シーケンスに対する保護。
熱モーター保護;
パワーサイリスタの故障に対する保護。
サイリスタの制御性が失われた場合の保護。
モーターの熱保護には、モーター巻線に組み込まれた温度センサーが必要であり、制御システムは、対応する入力および処理システムの存在のみを提供します。 このようなセンサーがない場合、いわゆる間接熱保護が実行されます。これは、エンジンの1つまたは別の熱モデルに基づいており、メーカーによってマイクロコントローラーソフトウェアに組み込まれます。
考慮されている機能に加えて、一部のメーカーは、TPUに絶縁抵抗センサーを搭載し、直流または交流で巻線を乾燥させる可能性を備えています。
制御システム
制御システムのインターフェース部分には、原則として、オペレーターインターフェースと機器インターフェースの2つの部分が含まれます。
オペレータインターフェイスは通常、液晶ディスプレイ(LCD)とデバイスのフロントパネルにあるキーボードに基づいて実行されます。 LCDとキーボードはデバイスのプログラムに使用され、LCDにはデバイスの動作モードに関する情報が表示されます。 低コストデバイスの多くのメーカー 低電力 LED表示とマイクロスイッチ(設定可能なジャンパー)に基づくオペレーターインターフェースを実装します。
機器インターフェースは、制御信号を入力し、デバイスの状態に関する信号を出力するために開発されたシステムを想定しています。 したがって、開始/停止コマンドは、電圧レベル、統一された電流信号、またはドライ接点信号の形式で受信できます。 最新モデルのデバイスには、RS-232、RS-432、CANバスに基づくシリアル通信チャネルが含まれており、デバイスのプログラミングと開始/停止コマンドの設定、および動作モードに関する情報の読み取りの両方を実行できます。 入力、出力信号の総数は15〜20チャネルに達する可能性があります。
メーカー
現在、TPUは、ABB、Siemens、Emotron AB、Softtronic、Telemecanique、Ansaldoなどのグローバルメーカーによって製造されています。 ロシアの企業もTPUの生産をマスターしました。 ほとんどの企業は、電源ユニット、制御システム、および補助要素を収容するモノブロックの形でTPUを製造しています。 ほとんどの外部デバイスにはバイパスコンタクタが含まれておらず、制御システムは外部コンタクタの制御要素のみを提供することに注意してください。
例として 国内TPU TPU4Kは、55〜160kWの電力で駆動できます。 これは、従来の方式に従って構築され、バイパスコンタクタが組み込まれており、制御システムのコアとしてAtmelマイクロコントローラを使用しています。 LCD、パラメータ入力時に接続されたキーボード、さまざまな動作モードの現在の設定を設定する多数のポテンショメータなど、オペレータインターフェイスが組み合わされています。 TPUには、次の保護機能があります。TPU出力での安定した短絡に対する保護。 始動中のモーターシャフトの詰まりから; 動作モードでの現在の過負荷に対して。 相故障から; バイパスコンタクタをオンにしないことから。 モーターの熱保護。
保護がトリガーされると、TPUは、特定のタイプのドライブ用に最適化されたアルゴリズムに従って、エンジンを停止する手順を実行します。 TPUは、入力での位相シーケンスに関して不変になっているため、供給ネットワークの誤った位相に対する保護は必要ありません。 サービス機能のうち、起動プロセスが問題なく完了したことを示す出力があることに注意してください。
ほぼ同じ技術的特性を備えた、さまざまなメーカーの多種多様な始動デバイスにより、コスト、運用、および「ユーザー」特性に注意を払うことができます。
国内メーカーの製品が海外メーカーの製品よりも大幅に安いことは注目に値します。 さらに、一部の国内メーカーは、海外のメーカーとは異なり、試運転、製品を特定のドライブに適合させ、特定のメカニズムに関連してその特性を最適化するためのコストをデバイスの価格に含めています。 マイクロコントローラーの存在により、個々の国内メーカーは、特定の顧客および特定のタイプのドライブの要件にアルゴリズムとパラメーターを迅速に適合させることができますが、欧米の企業の代表者はそのようなサービスを提供していません。
SCPの例:
1)統合機能を備えたSIRIUS 3RW40ソフトスターター:
ソリッドステートモーター保護とデバイス自体の過負荷保護
三相非同期モーターのソフトスタートとストップのための調整可能な電流制限
75〜250 kW(400 Vで)の定格電力範囲
使用分野:
ファン、ポンプ、建設機械、プレス、エスカレーター、空調システム、輸送システム、組立ライン、コンプレッサー、 
クーラー、アクチュエーター。
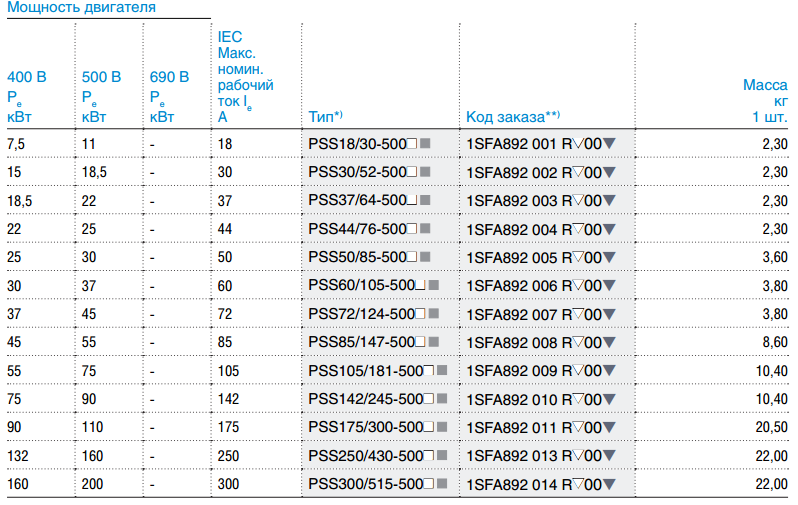
2)PSSソフトスターターはユニバーサルシリーズです。 しっかりしたABB

3)Altistart48ソフトスターターとブレーキSchneiderElectric


すでに完全に機能しているデバイスやメカニズムの再装備に負担をかけ、お金と時間を費やしたいのは誰ですか? 練習が示すように-多く。 生活の中で誰もが強力な電気モーターを備えた産業機器に遭遇するわけではありませんが、日常生活ではそれほど貪欲で強力な電気モーターではありませんが、彼らは常に出会います。 ええと、確かに、誰もがエレベーターを使いました。
事実、ローターを始動または停止する瞬間に、事実上すべての電気モーターに大きな負荷がかかります。 エンジンとそれが駆動する機器が強力であるほど、それを実行するコストは高くなります。
おそらく、始動時にエンジンにかかる最も重要な負荷は、短期的ではありますが、ユニットの定格動作電流を超える倍数です。 数秒の動作後、電気モーターが公称速度に達すると、電気モーターによって消費される電流も通常のレベルに戻ります。 必要な電源を確保するため 電気機器と導線の容量を増やす必要がありますそれは彼らの価格を押し上げます。
強力な電気モーターを始動すると、その消費量が多いため、供給電圧の「ドローダウン」が発生し、同じラインから電力を供給される機器の誤動作や故障につながる可能性があります。 また、電源装置の耐用年数が短くなります。
エンジンが燃え尽きる、またはエンジンがひどく過熱するような緊急事態が発生した場合、 変圧器鋼の特性が変化する可能性があります修理後、エンジンの出力が最大30%失われるほどです。 このような状況では、それ以上の操作にはもはや適さず、交換が必要であり、これも安価ではありません。
ソフトスタートとは何ですか?
すべてが正しいように思われ、機器はこのために設計されています。 しかし、常に「しかし」があります。 私たちの場合、いくつかあります:
- 電気モーターを始動する瞬間に、供給電流が定格を1.5倍から5倍超える可能性があり、これは巻線の大幅な加熱につながりますが、これはあまり良くありません。
- 直接接続によってエンジンを始動すると、ジャークが発生します。これは、主に同じ巻線の密度に影響を与え、動作中の導体の摩擦を増加させ、絶縁の破壊を加速し、時間の経過とともに、ターン間の短絡につながる可能性があります。
- 前述のジャークと振動は、被駆動ユニット全体に伝達されます。 それはまったく健康的ではありません。 可動部に損傷を与える可能性があります:システム 歯車、ドライブベルト、コンベヤーベルト、またはけいれんするエレベーターに乗っている自分を想像してみてください。 ポンプとファンの場合、これはタービンとブレードの変形と破壊のリスクです。
- 生産ラインにあるかもしれない製品を忘れないでください。 それらは、そのようなジャークのために落下、崩壊、または破損する可能性があります。
- さて、そしておそらく注目に値する最後のポイントは、そのような機器を操作するコストです。 私たちは、頻繁な重大な負荷に関連する高価な修理だけでなく、非効率的に使用された電気の具体的な量についても話します。
上記の操作上の問題はすべて、強力で面倒なことにのみ固有のものであるように思われます。 産業機器、しかし、そうではありません。 これはすべて、平均的な素人にとって頭痛の種になる可能性があります。 まず第一に、これは動力工具に適用されます。
電気ジグソー、ドリル、グラインダーなどのようなユニットの使用の詳細は、比較的短い期間内の複数の開始および停止サイクルを伴う。 この動作モードは、同じ程度に、それらの耐久性とエネルギー消費、およびそれらの産業用対応物に影響を与えます。 ただし、そのシステムを忘れてはなりません ソフトスタート エンジン速度を制御できませんまたは方向を逆にします。 また、始動トルクを上げたり、モーターローターの回転を開始するのに必要な電流よりも電流を減らしたりすることはできません。
電気モーターのソフトスタートシステムのオプション
スターデルタシステム
 産業用非同期モーターで最も広く使用されている始動システムの1つ。 その主な利点は単純さです。 スターシステムの巻線が切り替わるとエンジンが始動し、その後、公称速度が設定されると、自動的にデルタ切り替えに切り替わります。 この種のスタート ほぼ3分の1の電流を達成できます電気モーターの直接始動よりも。
産業用非同期モーターで最も広く使用されている始動システムの1つ。 その主な利点は単純さです。 スターシステムの巻線が切り替わるとエンジンが始動し、その後、公称速度が設定されると、自動的にデルタ切り替えに切り替わります。 この種のスタート ほぼ3分の1の電流を達成できます電気モーターの直接始動よりも。
ただし、この方法は、回転慣性が小さい機構には適していません。 これらには、たとえば、タービンのサイズと重量が小さいため、ファンや小型ポンプが含まれます。 「スター」構成から「デルタ」構成への移行時に、速度が大幅に低下するか、完全に停止します。 その結果、切り替え後、電気モーターは基本的に再起動します。 つまり、最終的には、エンジンリソースの節約を達成するだけでなく、ほとんどの場合、電力のオーバーランが発生します。
電子モーターソフトスターター
 エンジンのソフトスタートは、制御回路に含まれるトライアックを使用して実行できます。 このような包含には、単相、2相、および3相の3つのスキームがあります。 それらのそれぞれは、その機能と最終的なコストがそれぞれ異なります。
エンジンのソフトスタートは、制御回路に含まれるトライアックを使用して実行できます。 このような包含には、単相、2相、および3相の3つのスキームがあります。 それらのそれぞれは、その機能と最終的なコストがそれぞれ異なります。
これらのスキームは通常 なんとか削減する 始動電流 公称2または3まで。 さらに、前述のスターデルタシステムに固有の大幅な加熱を低減することが可能であり、これは電気モーターの耐用年数の延長に貢献します。 エンジンの始動は電圧を下げることによって制御されるため、ローターの加速は他の方式のように急激ではなくスムーズに実行されます。
一般に、いくつかの重要なタスクがエンジンソフトスタートシステムに割り当てられます。
- 主なもの-始動電流を公称3または4に下げます。
- 適切な容量と配線が存在する場合のモーター供給電圧の低下。
- 始動およびブレーキパラメータの改善。
- 現在の過負荷に対するネットワークの緊急保護。
単相始動回路
このスキームは、11キロワット以下の電力で電気モーターを始動するように設計されています。 このオプションは、始動時の衝撃を和らげる必要があり、ブレーキ、ソフトスタート、始動電流の低下が問題にならない場合に使用されます。 まず第一に、そのような計画で後者を組織することは不可能であるため。 しかし、トライアックを含む半導体の生産が安価であるため、それらは製造中止になり、めったに見つかりません。
二相始動回路
このようなスキームは、最大250ワットの出力でエンジンを調整および始動するように設計されています。 そのようなソフトスタートシステム バイパスコンタクタが装備されている場合もありますただし、デバイスのコストを削減するために、これは、過熱につながる可能性のある相の非対称電源の問題を解決しません。
三相始動回路
この回路は、電気モーター用の最も信頼性が高く用途の広いソフトスタートシステムです。 このようなデバイスによって制御されるモーターの最大電力は、使用されるトライアックの最大の熱的および電気的耐久性によってのみ制限されます。 彼の 汎用性により、多くの機能を実装できます例:ダイナミックブレーキ、フライバック、リミットバランシング 磁場そして現在。
前述の最後の回路の重要な要素は、前述のバイパスコンタクタです。 彼 電気モーターのソフトスタートシステムの正しい熱レジームを確保することができます、エンジンが通常の動作速度に達した後、過熱を防ぎます。
上記の特性に加えて、現在存在する電気モーターのソフトスターターは、さまざまなコントローラーや自動化システムとの共同動作用に設計されています。 それらは、オペレーターまたはグローバル制御システムのコマンドでオンにする機能があります。 このような状況では、負荷をオンにした瞬間に干渉が発生し、自動運転の誤動作につながる可能性があるため、保護システムに注意する必要があります。 ソフトスタート回路を使用すると、その影響を大幅に減らすことができます。
印刷
電気駆動
ソフトスターター:正しい選択
周波数変換器の特性については前に説明しましたが、今日はソフトスターターの番です(ソフトスターター、ソフトスターター-単一の用語はまだ決まっていません。この記事では「ソフトスターター」という用語を使用します-SCP) 。
時々売り手の口から、ソフトスターターを選ぶのは簡単だという意見を聞かなければならないことがあります、彼らはこれは周波数変換器ではなく、ここではスタートアップを組織することだけが必要であると言います。 本当じゃない。 ソフトスターターは選択がより困難です。 この複雑さが何であるかを理解してみましょう。
SCPの目的
名前が示すように、デバイスのタスクはソフトスタートを整理することです。 誘導電動機 交流電流。 事実、直接始動中(つまり、モーターが従来のスターターを使用して主電源に接続されている場合)、モーターは定格電流を超える始動電流を消費します。 5〜7回、および公称トルクよりも大幅に高い始動トルクを発生させます。 これはすべて、2つのグループの問題につながります。
1)始動が速すぎるため、油圧ショック、機構のけいれん、バックラッシュのショック選択、コンベヤーベルトの破損など、さまざまな問題が発生します。
2)スタートが重く、完走できません。 ここでは、最初に「ハードスタート」という用語と、ソフトスターターを使用したその「ファシリテーション」の可能性を定義する必要があります。 「ヘビースタート」には通常、次の3種類のスタートが含まれます。
a)供給ネットワークの起動、「重い」-ネットワークには、ほとんど供給できない、またはまったく供給できない電流が必要です。 特徴:起動中、システム入力のオートマトンがオフになり、起動時にライトが消灯し、一部のリレーとコンタクタがオフになり、供給ジェネレータが停止します。 ほとんどの場合、UPPはここで問題を実際に修正します。 ただし、最良の場合、始動電流を定格モーター電流の250%に減らすことができ、これが十分でない場合は、解決策が1つだけであることに注意してください。周波数変換器を使用する必要があります。
b)エンジンは、直接始動時にメカニズムを始動できません。エンジンはまったく回転しないか、特定の速度で「フリーズ」し、保護がトリガーされるまでその状態を維持します。 悲しいかな、ソフトスターターは彼を助けません-エンジンはシャフトに十分なトルクを持っていません。 周波数変換器がこのタスクに対処する可能性はありますが、この場合は調査が必要です。
c)エンジンは自信を持ってメカニズムを加速しますが、公称周波数に到達する時間がありません。入力で自動機械がトリガーされます。 これは、かなり高速の重いファンでよく発生します。 ここではソフトスターターが役立つ可能性が最も高いですが、失敗のリスクは残ります。 保護動作時の公称速度にメカニズムが近いほど、成功の可能性が高くなります。
ソフトスターターによるスタートアップ組織
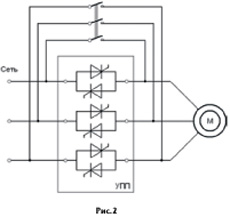
ソフトスターターの動作原理は、ネットワークからソフトスターターを介して負荷に供給される電圧が、特殊な電源スイッチ(トライアック(または逆並列接続されたサイリスタ))によって制限されることです。図を参照してください。 1.その結果、負荷の電圧を調整することができます。
少し理論:スタートアッププロセスは変革プロセスです 電気エネルギー定格速度で動作するメカニズムの運動エネルギーへの電源。 非常に簡単に言えば、このプロセスは次のように説明できます。加速中、モーター抵抗Rは、エンジン停止時の非常に小さい値から定格速度で非常に大きい値に増加するため、オームの法則によれば、電流は等しくなります。に:
I = U / R(1)
非常に大きいことが判明し、エネルギー伝達
E \ u003d P x t \ u003d I x U x t(2)
とても早い。 ネットワークとモーターの間にソフトスターターが取り付けられている場合、式(1)はその出力で機能し、式(2)は入力で機能します。 両方の式の電流が同じであることは明らかです。 ソフトスターターはモーターの電圧を制限し、抵抗の増加に続いて加速するにつれて徐々に電圧を増加させ、消費される電流を制限します。 したがって、式(2)によれば、必要なエネルギーEとネットワーク電圧Uが一定の場合、電流Iが低いほど、起動時間tは長くなります。 このことから、電圧を下げることにより、始動が速すぎることに関連する問題と、始動に関連する問題の両方が見られます。 大電流ネットワークから消費されます。
しかし、私たちの計算では、加速するために追加のトルクを必要とする負荷、したがって追加の電流を考慮していなかったため、電流を過度に減らすことは不可能です。 負荷が高い場合、低電圧での始動は言うまでもなく、直接始動してもモーターシャフトのトルクが十分でない可能性があります。これは上記のハードスタートオプション「b」です。 電流の減少に伴い、トルクが加速に十分であることが判明したが、式(2)の時間が増加した場合、機械は動作する可能性があります-その観点から、電流の流れの時間は大幅に超過します公称値は、許容できないほど長いです(ハードスタートオプション「c」)。
ソフトスターターの主な特徴。 電流制御の可能性。 本質的に、これは、与えられた特性に従って電流が変化するように電圧を調整するソフトスターターの能力です。 この関数は通常、現在の関数の開始と呼ばれます。 そのような機会がない最も単純なソフトスターターは、単に時間の関数として電圧を調整します-つまり、 モーターの電圧は、一定時間、初期から公称値まで徐々に増加します。 多くの場合、特にグループ1の問題を解決する場合は、これで十分です。ただし、ソフトスターターを取り付ける主な理由が電流制限である場合は、正確な調整が不可欠です。 この機能は、ネットワークの電力が制限されているため(小さな変圧器、弱い発電機、細いケーブルなど)、最大許容電流を超えて事故が発生した場合に特に重要です。 さらに、電流制御を備えたソフトスターターは、始動プロセスの開始時に電流のスムーズな増加を実装できます。これは、突然の負荷サージに非常に敏感な発電機から操作する場合に特に重要です。
入換の必要性。
スタートアッププロセスの終わりに到達します 定格電圧エンジンでは、電源回路からソフトスターターを取り外すことが望ましいです。 このために、バイパスコンタクタが使用され、ソフトスタータの入力と出力が段階的に接続されます(図2を参照)。
 ソフトスタータからのコマンドで、このコンタクタが閉じ、電流がデバイスの周りを流れ、その電力要素が完全に冷却されます。 ただし、シャント回路がない場合でも、エンジンの全動作中に公称電流がトライアックを流れる場合 電力電流、起動モードと比較して加熱が小さいことが判明したため、多くのソフトスターターはシャントなしで動作できます。 この可能性の代償は、定格電流がわずかに低く、電源スイッチから熱を取り除くためにヒートシンクが必要なため、重量と寸法が大幅に増加することです。 一部のソフトスターターは反対の原理で構築されています-バイパスコンタクターはすでに組み込まれており、バイパスなしで動作するようには設計されていません。したがって、冷却ラジエーターの削減により、それらの寸法は最小になります。 これは、価格と結果の接続スキームの両方にプラスの効果をもたらしますが、起動モードでの動作時間は他のデバイスと比較して短くなります。
ソフトスタータからのコマンドで、このコンタクタが閉じ、電流がデバイスの周りを流れ、その電力要素が完全に冷却されます。 ただし、シャント回路がない場合でも、エンジンの全動作中に公称電流がトライアックを流れる場合 電力電流、起動モードと比較して加熱が小さいことが判明したため、多くのソフトスターターはシャントなしで動作できます。 この可能性の代償は、定格電流がわずかに低く、電源スイッチから熱を取り除くためにヒートシンクが必要なため、重量と寸法が大幅に増加することです。 一部のソフトスターターは反対の原理で構築されています-バイパスコンタクターはすでに組み込まれており、バイパスなしで動作するようには設計されていません。したがって、冷却ラジエーターの削減により、それらの寸法は最小になります。 これは、価格と結果の接続スキームの両方にプラスの効果をもたらしますが、起動モードでの動作時間は他のデバイスと比較して短くなります。
調整可能なフェーズの数。
このパラメータに従って、ソフトスターターは2相と3相に分けられます。 2フェーズでは、名前が示すように、キーは2フェーズでのみインストールされ、3番目のフェーズはエンジンに直接接続されます。 長所-暖房の削減、サイズと価格の削減。
短所-位相電流消費量が非線形で非対称であり、特別な制御アルゴリズムによって部分的に補償されますが、それでもネットワークとモーターに悪影響を及ぼします。 ただし、起動頻度が低いため、これらの欠点は無視できます。
デジタル制御。ソフトスターターの制御システムは、デジタルとアナログにすることができます。 デジタルソフトスターターは通常、マイクロプロセッサに実装されており、デバイスの動作プロセスを非常に柔軟に制御でき、さまざまな実装が可能です。 追加機能と保護だけでなく、上位レベルの制御システムとの便利な表示と通信を提供します。 アナログソフトスターター制御は操作要素を使用するため、機能が制限され、調整はポテンショメーターとスイッチによって実行され、外部制御システムとの通信は通常、追加のデバイスを使用して実行されます。
追加機能
保護。あなたを除いて 主な機能-ソフトスタートの構成-ソフトスターターには、メカニズムとエンジンの保護の複合体が含まれています。 原則として、この複合体には、過負荷および電源回路の障害に対する電子的保護が含まれます。 追加のセットには、起動時間が超過すること、位相の不均衡、位相シーケンスの変化、低電流(ポンプのキャビテーションに対する保護)、ソフトスターターラジエーターの過熱、主電源周波数の低下などに対する保護が含まれる場合があります。 多くのモデルは、モーターに組み込まれたサーミスタまたはサーマルリレーに接続できます。 ただし、ソフトスターターは負荷回路の短絡から自身またはネットワークを保護できないことに注意してください。 もちろん、ネットワークは導入マシンによって保護されますが、短絡が発生した場合、ソフトスターターは必然的に失敗します。 いくつかの慰めは、適切に設置された短絡が即座に発生しないことだけであり、負荷抵抗を減らす過程で、ソフトスターターは確実にオフになりますが、シャットダウンの理由を確立せずに再度オンにしないでください。
速度が低下しました。一部のソフトスターターは、いわゆる疑似周波数制御、つまりモーターを減速する速度に移行することを実装できます。 これらの速度低下のいくつかがあるかもしれませんが、それらは常に厳密に定義されており、ユーザーが調整することはできません。
さらに、これらの速度での動作には非常に時間制限があります。 原則として、これらのモードは、デバッグのプロセスで、またはメカニズムを微調整する必要がある場合に使用されます。 望ましい位置作業を開始する前または作業の終了時に。
制動。 かなりの数のモデルがモーター巻線に適用できます D.C.、ドライブの集中ブレーキにつながります。 この機能は通常、 アクティブロード–エレベーター、傾斜コンベヤー、つまり ブレーキがなくても自力で動くシステム。 ドラフトまたは別のファンの動作により反対方向に回転しているファンを事前に起動するために、この機能が必要になる場合があります。
プッシュスタート。始動トルクの高い機構に使用されます。 この機能は、始動の最初の段階で、完全な主電源電圧が短時間(数分の1秒)エンジンに供給され、メカニズムが故障した後、さらに加速が発生するという事実にあります。ノーマルモード。
省エネポンプとファンの負荷で。 ソフトスターターは電圧レギュレーターであるため、軽負荷時に機構の動作を損なうことなく供給電圧を下げることができます。
これによりエネルギーを節約できますが、電圧制限モードのサイリスタはネットワークの非線形負荷であり、その後のすべての結果を伴うことを忘れてはなりません。
メーカーが自社製品に含める機会は他にもありますが、1つの記事の量ではそれらをリストするのに十分ではありません。
選定方法
ここで、最初の場所に戻ります。特定のデバイスの選択に戻ります。
周波数変換器を選択するためのヒントの多くはここにも当てはまります。最初に機能の技術要件を満たすシリーズを選択し、次に特定のプロジェクトの電力範囲をカバーするシリーズを選択し、残りから、に従って目的のシリーズを選択します。その他の基準-メーカー、サプライヤー、サービス、価格、寸法など。
1時間に2〜3回しか始動しないポンプまたはファンのソフトスターターを選択する必要がある場合は、始動するモーターの定格電流以上の定格電流を持つモデルを選択するだけです。 このケースは、アプリケーションの約80%をカバーしており、専門家に相談する必要はありません。 1時間あたりの始動頻度が10を超える場合は、必要な電流制限と必要な始動遅延の両方を考慮する必要があります。 この場合、サプライヤの助けが非常に望ましいです。サプライヤには、原則として、目的のモデルを選択するためのプログラム、または少なくとも計算アルゴリズムがあります。 計算に必要なデータ:定格モーター電流、1時間あたりの始動回数、必要な始動時間、必要な電流制限、必要な停止時間、周囲温度、予想されるシャント。
モーターが1時間に30回以上始動する場合は、代わりに周波数変換器を使用することを検討する価値があります。より強力なソフトスターターモデルを選択しても問題が解決しない場合があるためです。 また、その価格は、機能が大幅に少なく、ネットワークの品質に深刻な影響を与えるコンバーターの価格にすでに匹敵します。
繋がり
ネットワークとエンジンへのデバイスの明らかな接続に加えて、シャントを決定する必要があります。
バイパスコンタクタがモーターの始動電流ではなく定格電流を切り替えるという事実にもかかわらず、少なくとも緊急操作の実装には、直接始動用に設計されたモデルを使用することが依然として望ましいです。 接続するときは注意してください 特別な注意位相調整の場合-たとえば、ソフトスターターの入力のフェーズAを出力の別のフェーズに誤って接続すると、バイパスコンタクターの最初のオン時に短絡が発生し、デバイスが無効になります。
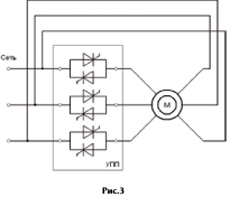
一部のソフトスターターでは、いわゆる6線式接続が可能であり、その図を図1に示します。 3.この接続にはより多くのケーブルが必要ですが、ソフトスターター自体よりもはるかに大きいモーターでソフトスターターを使用できます。
 ソフトスターターを取り付けるときは、もう1つの特性に留意する必要があります。これは、誤解を招くことがよくあります(ヘビースタート「c」を参照)。 計算するとき 導入機主電源に直接接続されているモーターの場合、長時間流れるモーターの定格電流と、数秒しか流れない始動電流が考慮されます。 ソフトスターターを使用する場合、始動電流は大幅に少なくなりますが、流れははるかに長くなります(最大1分以上)。 オートマトンはこれを「理解」できず、起動がかなり前に完了したと見なし、定格電流の何倍もの電流が緊急事態の結果であると見なし、システムをオフにします。 これを回避するには、ソフトスタートプロセスに追加モードを設定する機能を備えた特別なマシンをインストールするか、 定格電流ソフトスターター使用時の始動電流に対応します。 2番目のケースでは、このマシンはモーターを過負荷から保護できませんが、ソフトスターター自体がこの機能を実行するため、モーター保護は影響を受けません。
ソフトスターターを取り付けるときは、もう1つの特性に留意する必要があります。これは、誤解を招くことがよくあります(ヘビースタート「c」を参照)。 計算するとき 導入機主電源に直接接続されているモーターの場合、長時間流れるモーターの定格電流と、数秒しか流れない始動電流が考慮されます。 ソフトスターターを使用する場合、始動電流は大幅に少なくなりますが、流れははるかに長くなります(最大1分以上)。 オートマトンはこれを「理解」できず、起動がかなり前に完了したと見なし、定格電流の何倍もの電流が緊急事態の結果であると見なし、システムをオフにします。 これを回避するには、ソフトスタートプロセスに追加モードを設定する機能を備えた特別なマシンをインストールするか、 定格電流ソフトスターター使用時の始動電流に対応します。 2番目のケースでは、このマシンはモーターを過負荷から保護できませんが、ソフトスターター自体がこの機能を実行するため、モーター保護は影響を受けません。
まとめましょう。 開始をスムーズにしたいメカニズムが、この記事に記載されているすべての制限に適合し、利用可能なソフトスターターモデルによって提供される可能性が適している場合は、ソフトスターターを選択します。 周波数変換器を使用する場合(電源トランスを交換する、発電機の電力を増やす、ケーブルを太いものに交換する-ケースを選択)と比較して、コストの節約が顕著になります。 何らかの理由でソフトスターターが適していない場合は、周波数変換器にもう一度注意を払ってください。周波数変換器は、より高価ですが、はるかに機能的です。
Ruslan Khusainov、Ph.D.、Santerno CJSC(モスクワ)のテクニカルディレクター
広告

電気駆動 25.07.2017 安川電機は、窒化ガリウム半導体増幅器を内蔵した世界初のサーボモーターの開発を発表しました。 Σ-7Fサーボモーターは従来のドライブの半分のサイズであり、よりコンパクトで効率的なソリューションを可能にします。
高出力の電気駆動装置を直接起動すると、大幅な電圧降下が発生し、変電所の緊急停止につながる可能性さえあります。 中出力および低出力の機械では、直接始動すると、エンジントルクの急激な上昇の結果として、システムのさまざまな機械装置が損傷する可能性があります。 さらに、直接始動はエンジン自体にとってあまり好ましくないため、エンジンの耐用年数が短くなります。
ネットワークおよびシステムの機械部品への突入電流の影響を減らすために、デバイスを使用して突入電流を制限します。 短絡ローターを備えた非同期機のこのような手段は、 最新のデバイスソフトスターターまたはそれはまた呼ばれるように-サイリスタ電圧レギュレーター。
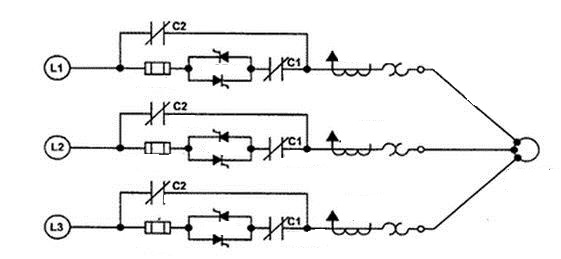
ソフトスターターは非常に単純です-図は以下のとおりです。
これは、非同期マシンの各フェーズで連続して含まれているだけです。 ソフトスターターの動作原理は非常に単純です。モーター巻線の電圧は、サイリスタの開き角によって調整されます。
したがって、始動電流、したがってトルクの滑らかな増加を得ることが可能である。

電気モーターが希望の速度まで加速した後、サイリスタの開き角度が最大に設定され、機械は通常モードで動作します。 ただし、この動作モードでは、電源スイッチが加熱されるため、より強力なスイッチを設置し、強制冷却システムを実装する必要があります。 これにより、ソフトスターターソフトスターターはより大きく、より高価になります。 この問題を解決するために、彼らは次の解決策を考え出しました-起動後、電源スイッチはコンタクタでシャントされます。 これにより、電気駆動システムの定常状態での運転時にパワーバルブを停止することができ、換気の問題が解消されます。
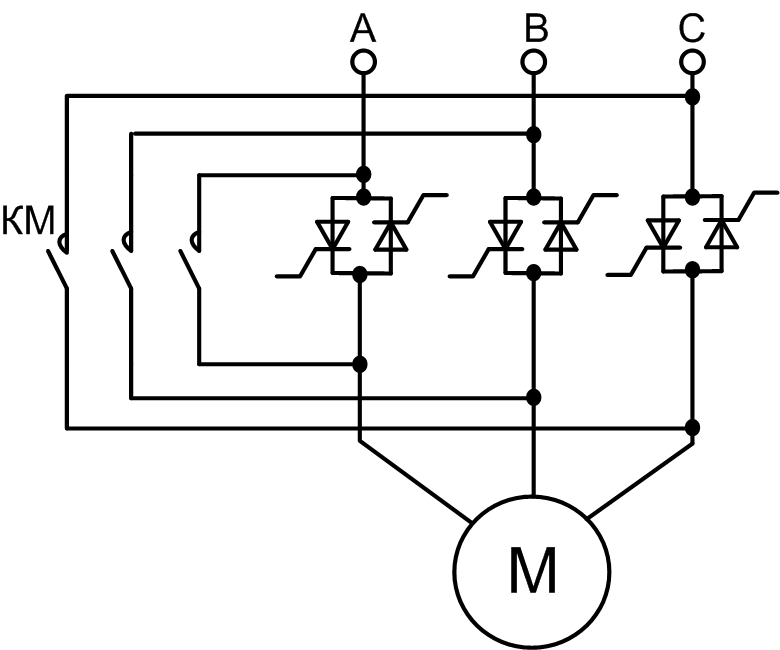
場所:KM-サイリスタをシャントするコンタクタ。
回路をさらに単純化するために、電圧制御は2つのフェーズで実行されます。

このシステムには次の利点があります。
- 始動時の機械の固定子の電流サージを減らします。
- 電気機械の過負荷を完全に制御します。
- 電気駆動装置のジャークを排除し、機器のより長い耐用年数を保証します。
- パイプラインおよびポンプの始動時に、油圧ショックが排除されます。
- いつ 緊急事態このようなデバイスは、最大のパフォーマンスを提供する可能性があります。
欠陥:
- ソフトスターターとは異なり、定常状態では非同期機の速度を調整できません(始動とブレーキにのみ適用可能)。
- モーターを逆転させません。 リバースを実装するには、リバーサーを追加でインストールする必要があります。
- 電気モーターとネットワークの両方に悪影響を与える高調波の生成。
- 始動トルクが比較的小さい。
誘導電動機の始動には大量の電流とトルクが必要であり、モーターの巻線が焼損する可能性があるため、誘導電動機のソフト始動は常に困難な作業です。 エンジニアは、スイッチング回路や単巻変圧器などの使用など、この問題を克服するための興味深い技術的ソリューションを常に提案および実装しています。
現在、このような方法は、電気モーターのスムーズな動作のためにさまざまな産業設備で使用されています。
物理学から、誘導電気モーターの動作原理が知られており、その本質は、固定子と回転子の磁場の回転周波数の差を使用することです。 回転子の磁場は、固定子の磁場に追いつくことを試み、大きな始動電流の励起に寄与します。 モーターは全速力で動作しますが、トルク値も電流に応じて増加します。 その結果、過熱によりユニットの巻線が損傷する可能性があります。
そのため、ソフトスターターの設置が必要になります。 三相非同期モーター用のソフトスターターは、誘導モーターのスリップ効果に起因する初期の大電流とトルクからユニットを保護するのに役立ちます。
ソフトスターター(SCD)を備えた回路を使用することの利点:
- 始動電流の減少;
- エネルギーコストの削減。
- 効率の向上;
- 比較的低コスト。
- ユニットに損傷を与えることなく最高速度を達成します。
エンジンをスムーズに始動するには?
5つの基本的なソフトスタート方法があります。
- 図のようにローター回路に外部抵抗を加えることで高トルクを発生させることができます。
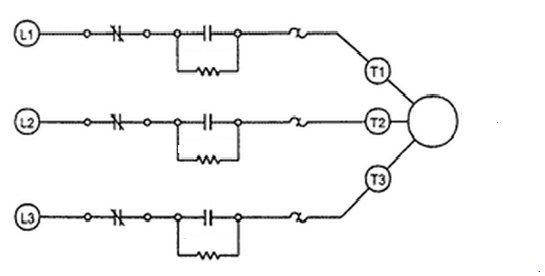
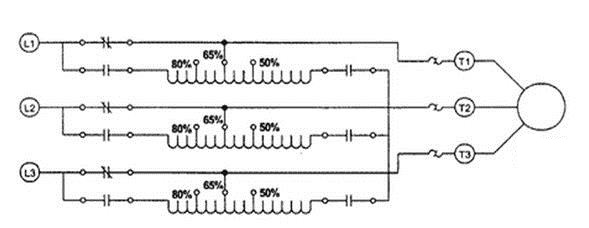
- 回路に自動トランスを組み込むことにより、初期電圧を下げることで始動電流とトルクを維持することができます。 下の写真を参照してください。
- 誘導電動機は電源に直接接続されているため、直接始動が最も簡単で安価な方法です。
- 特別な巻線構成での接続-この方法は、通常の状態での動作を目的としたモーターに適用できます。

- SCPの使用は、リストされているすべての方法の中で最も進んでいます。 ここでは、誘導モーターの速度を調整するサイリスタやSCRなどの半導体デバイスが機械部品に取って代わります。
コレクターモータースピードコントローラー
家電製品や電動工具のほとんどの回路は コレクター電気モーター 220V。そのような要求は普遍性によって説明されます。 ユニットは、直流または交流電圧で電力を供給できます。 この回路の利点は、有効な始動トルクを提供することです。
よりスムーズなスタートを実現し、速度を調整する機能を持たせるために、スピードコントローラーが使用されます。
自分の手で電気モーターを始動することは、たとえばこの方法で行うことができます。
結論
ソフトスターターは、エンジン始動性能の向上を制限するように設計および製造されています。 そうしないと、望ましくない現象がユニットの損傷、巻線の焼損、または動作回路の過熱につながる可能性があります。 長い耐用年数のために、ソフトスタートモードで、三相モーターが電力サージなしで動作することが重要です。
誘導電動機が希望の速度を拾うとすぐに、回路リレーを開くための信号が送信されます。 ユニットは、過熱やシステム障害なしにフルスピードで動作する準備が整います。 提示された方法は、産業および国内の問題を解決するのに役立つ可能性があります。