Motore elettrico asincrono trifase con due gruppi spazzole. Motori asincroni monofase. Dispositivo e principio di funzionamento
La facilità di conversione della tensione CA lo ha reso il più utilizzato nell'alimentazione elettrica. Nel campo della progettazione dei motori elettrici è stato scoperto un altro vantaggio della corrente alternata: la capacità di creare una corrente rotante campo magnetico senza trasformazioni aggiuntive o con un numero minimo di esse.
Pertanto, nonostante alcune perdite dovute alla resistenza reattiva (induttiva) degli avvolgimenti, la facilità di creazione di motori elettrici CA ha contribuito alla vittoria sull'alimentazione CC all'inizio del XX secolo.
Fondamentalmente i motori elettrici AC possono essere divisi in due gruppi:
Asincrono
In essi, la rotazione del rotore differisce in velocità dalla rotazione del campo magnetico, grazie alla quale possono funzionare a un'ampia varietà di velocità. Questo tipo di motore AC è il più comune al giorno d'oggi.
Sincrono
Questi motori hanno un collegamento rigido tra la velocità del rotore e la velocità di rotazione del campo magnetico. Sono più difficili da produrre e meno flessibili nell'uso (la modifica della velocità a una frequenza fissa della rete di alimentazione è possibile solo modificando il numero di poli dello statore). Trovano applicazione solo a potenze elevate di diverse centinaia di kilowatt, dove ce ne sono di più rispetto a a motori elettrici sincroni
L'efficienza riduce significativamente le perdite di calore.
MOTORE ELETTRICO AC ASINCRONO Il tipo più comune di motore asincrono è il motore elettrico. rotore a gabbia di scoiattolo
del tipo a “gabbia di scoiattolo”, dove nelle scanalature inclinate del rotore sono inserite una serie di aste conduttrici, collegate alle estremità da anelli.
La storia di questo tipo di motore elettrico risale a più di cento anni fa, quando si notò che un oggetto conduttivo posto nell'intercapedine del nucleo di un elettromagnete a corrente alternata tende a staccarsi da esso a causa del verificarsi di una fem indotta con un vettore opposto in esso. Pertanto, un motore asincrono con rotore a gabbia di scoiattolo non ha unità di contatto meccaniche oltre ai cuscinetti di supporto del rotore, il che fornisce ai motori di questo tipo non solo prezzo basso
, ma anche la massima durata. Grazie a ciò, i motori elettrici di questo tipo sono diventati i più comuni nell'industria moderna. alcuni svantaggi, di cui tenere conto nella progettazione dei motori elettrici asincroni tipo simile:
Corrente di avviamento elevata– poiché nel momento in cui il motore elettrico asincrono brushless è collegato alla rete, la reattanza dell’avvolgimento dello statore non è ancora influenzata dal campo magnetico creato dal rotore, si verifica un forte aumento di corrente, molte volte maggiore del consumo di corrente nominale .
Questa caratteristica del funzionamento di motori di questo tipo deve essere inclusa in tutti gli alimentatori progettati per evitare sovraccarichi, soprattutto quando si collegano motori elettrici asincroni a generatori mobili di potenza limitata.
Bassa coppia di spunto– i motori elettrici con avvolgimenti a gabbia di scoiattolo hanno una pronunciata dipendenza della coppia dai giri, quindi accenderli sotto carico è estremamente indesiderabile: il tempo per raggiungere la modalità nominale e correnti di avviamento, l'avvolgimento dello statore è sovraccarico.
Questo, ad esempio, accade all'accensione pompe per pozzi profondi– nei loro circuiti di alimentazione occorre tenere conto di una riserva di corrente da cinque a sette volte.
Impossibilità di avviamento diretto nei circuiti di corrente monofase- affinché il rotore inizi a ruotare, è necessaria una spinta iniziale o l'introduzione di ulteriori avvolgimenti di fase, sfasati l'uno rispetto all'altro.
Per iniziare motore elettrico asincrono Ingresso CA rete monofase viene utilizzato un avvolgimento di avvio commutato manualmente, che viene spento dopo aver avviato il rotore, oppure un secondo avvolgimento collegato tramite un elemento di sfasamento (molto spesso un condensatore della capacità richiesta).
Mancanza di possibilità di ottenere velocità di rotazione elevate- sebbene la rotazione del rotore non sia sincronizzata con la frequenza di rotazione del campo magnetico dello statore, non può farla avanzare, quindi, in una rete a 50 Hz, la velocità massima per un motore elettrico asincrono con rotore a gabbia di scoiattolo non è più superiore a 3000 giri/min.
L'aumento della velocità di rotazione di un motore asincrono richiede l'uso di convertitore di frequenza(inverter), il che rende tale sistema più costoso di un motore a spazzole. Inoltre, all’aumentare della frequenza, aumentano le perdite reattive.
Difficoltà nell'organizzare la retromarcia- ciò richiede l'arresto completo del motore e la commutazione delle fasi, nella versione monofase - uno sfasamento nell'avvolgimento di avviamento o seconda fase.
È più conveniente utilizzare un motore elettrico asincrono in una rete trifase industriale, poiché la creazione di un campo magnetico rotante viene effettuata dagli stessi avvolgimenti di fase senza dispositivi aggiuntivi.
Infatti, un esempio di trasmissione elettrica può essere considerato un circuito costituito da un generatore trifase e un motore elettrico: l'azionamento del generatore crea al suo interno un campo magnetico rotante, che viene convertito in oscillazioni corrente elettrica, eccitando a sua volta la rotazione del campo magnetico nel motore elettrico.
Inoltre, è con l'alimentazione trifase che i motori elettrici asincroni hanno la massima efficienza, poiché in una rete monofase il campo magnetico creato dallo statore può essenzialmente essere scomposto in due antifase, il che aumenta le perdite inutili per sovrasaturazione del nucleo. Pertanto, i potenti motori elettrici monofase vengono solitamente realizzati utilizzando un circuito a commutatore.
MOTORE ELETTRICO AC, COLLETTORE
Nei motori elettrici di questo tipo, il campo magnetico del rotore è creato dagli avvolgimenti di fase collegati al commutatore. In realtà un motore CA con spazzole è diverso da un motore DC solo perché nel suo calcolo è inclusa la reattanza degli avvolgimenti.
In alcuni casi, vengono persino creati motori a collettore universale, in cui l'avvolgimento dello statore ha una presa da una parte incompleta per l'inclusione nella rete a corrente alternata e una fonte di corrente continua può essere collegata all'intera lunghezza dell'avvolgimento.
I vantaggi di questo tipo di motore sono evidenti:
Capacità di operare a velocità elevate consente di creare motori elettrici a commutatore con una velocità di rotazione fino a diverse decine di migliaia di giri al minuto, familiari a tutti dai trapani elettrici.
Non sono necessari dispositivi di avviamento aggiuntivi a differenza dei motori a gabbia di scoiattolo.
Coppia di spunto elevata, che accelera il ritorno alla modalità operativa, anche sotto carico. Inoltre, la coppia del motore elettrico a collettore è inversamente proporzionale alla velocità e, all'aumentare del carico, consente di evitare un calo della velocità di rotazione.
Facilità di controllo della velocità- poiché dipendono dalla tensione di alimentazione, per regolare la velocità di rotazione entro limiti più ampi è sufficiente disporre del più semplice regolatore triac voltaggio. Se il regolatore si guasta, il motore del commutatore può essere collegato direttamente alla rete.
Minore inerzia del rotore- può essere reso molto più compatto rispetto a un cortocircuito, a causa del quale il motore del commutatore stesso diventa notevolmente più piccolo.
Inoltre, il motore del commutatore può essere semplicemente invertito, il che è particolarmente importante quando si creano vari tipi di utensili elettrici e una serie di macchine utensili.
Per questi motivi, i motori a collettore sono diffusi in tutti i consumatori monofase dove è necessario un controllo flessibile della velocità: negli utensili elettrici portatili, negli aspirapolvere, elettrodomestici da cucina e così via. Tuttavia, un numero caratteristiche di progettazione determina le specifiche di funzionamento di un motore elettrico a commutatore:
I motori del commutatore richiedono la sostituzione regolare delle spazzole, che con il tempo si usurano. Anche il commutatore stesso si usura, mentre un motore con rotore a gabbia di scoiattolo, come già scritto sopra, a condizione che i cuscinetti vengano sostituiti poco frequentemente, è praticamente eterno.
L'inevitabile scintilla tra il commutatore e le spazzole (causa della comparsa del familiare odore di ozono durante il funzionamento di un motore elettrico a collettore) non solo riduce ulteriormente la durata, ma richiede anche maggiori misure di sicurezza durante il funzionamento a causa della probabilità di accensione di gas o polveri infiammabili.
© 2012-2017 Tutti i diritti riservati.
Tutti i materiali presentati su questo sito sono solo a scopo informativo e non possono essere utilizzati come linee guida o documenti normativi.
Il motore elettrico monofase da 220 V è un meccanismo separato ampiamente utilizzato per l'installazione in una varietà di dispositivi. Può essere utilizzato per scopi domestici e industriali. Il motore elettrico è alimentato da presa regolare, dove deve essere presente una tensione di almeno 220 Volt. In questo caso, è necessario prestare attenzione alla frequenza di 60 hertz.
In pratica è dimostrato che un motore elettrico monofase a 220 V viene venduto insieme ad apparecchi che contribuire a trasformare l'energia campo elettrico e accumula anche la carica necessaria utilizzando un condensatore. Modelli moderni, prodotti utilizzando tecnologie innovative, i motori elettrici da 220 V sono inoltre dotati di apparecchiature per l'illuminazione del posto di lavoro del dispositivo. Questo vale per le parti interne ed esterne.
È importante ricordare che la capacità del condensatore deve essere immagazzinata rispettando tutti i requisiti di base. L'opzione migliore- questo è il posto dove la temperatura dell'aria rimane invariata e non è soggetto ad alcuna fluttuazione. Al chiuso regime di temperatura non dovrebbe scendere a un valore negativo.
Durante l'utilizzo del motore, gli esperti consigliano di misurare di tanto in tanto il valore di capacità del condensatore.
 I motori a induzione sono oggi ampiamente utilizzati per vari processi industriali. Questo particolare modello di motore elettrico viene utilizzato per diversi azionamenti. Disegni asincroni monofase aiutano a guidare macchine per la lavorazione del legno, pompe, compressori, dispositivi di ventilazione industriale, trasportatori, ascensori e molte altre attrezzature.
I motori a induzione sono oggi ampiamente utilizzati per vari processi industriali. Questo particolare modello di motore elettrico viene utilizzato per diversi azionamenti. Disegni asincroni monofase aiutano a guidare macchine per la lavorazione del legno, pompe, compressori, dispositivi di ventilazione industriale, trasportatori, ascensori e molte altre attrezzature.
Il motore elettrico viene utilizzato anche per azionare apparecchiature di meccanizzazione su piccola scala. Questi includono trinciatrici e betoniere. È necessario acquistare tali strutture solo da fornitori fidati. Prima dell'acquisto si consiglia di verificare i certificati di conformità e garanzia del produttore.
I fornitori devono fornire ai propri clienti servizio motore elettrico in caso di guasto o guasto. Questo è uno dei componenti principali che viene completato durante l'assemblaggio del gruppo pompa.
Serie esistente di motori elettrici
Oggi imprese industriali produrre la serie seguente motore elettrico monofase 220 V:

Assolutamente tutti i motori divisi per disegno, a seconda del metodo di installazione, nonché del grado di protezione. Ciò consente di proteggere la struttura dall'umidità o dalle particelle meccaniche.
Caratteristiche dei motori elettrici serie A
I motori elettrici monofase della serie A sono modelli asincroni unificati. Sono chiusi da influenza esterna utilizzando un rotore a gabbia di scoiattolo.
La struttura del motore elettrico ha i seguenti gruppi di prestazioni:

Il costo di un motore elettrico monofase 220V dipende dalla serie.
Che tipi di motori ci sono?

I motori monofase sono progettati per equipaggiare azionamenti elettrici per scopi domestici e industriali. Tali progetti sono realizzati in conformità con gli standard statali.
3-7. DISPOSITIVO DI MOTORI ELETTRICI ASINCRONI MONOFASE
Nella fig. La Figura 3-16 mostra il progetto di un motore elettrico asincrono monofase di tipo AOLB con un resistore di avviamento incorporato. Lo statore del motore elettrico è assemblato da fogli stampati di acciaio elettrico 15, pressati e versati in un guscio di alluminio (alloggiamento dello statore) con doppie pareti 13. Tra le pareti sono formati dei canali per il raffreddamento ad aria della superficie dello statore. Due coperchi 2 e 17, fusi in lega di alluminio, sono posti sulle affilature dell'alloggiamento dello statore.
Sul coperchio anteriore 17 è posto un cappuccio stampato 18 con fori all'estremità. Attraverso questi fori, quando il rotore ruota, la ventola 19, montata sull'estremità dell'albero del rotore, aspira aria. La ventola è fusa in lega di alluminio e fissata all'albero con una vite.
Le lamiere dello statore sono stampate con 24 scanalature a forma di pera. Di questi, 16 slot sono occupati dai fili dell'avvolgimento di lavoro e 8 slot sono occupati dai fili dell'avvolgimento di partenza. Le estremità di uscita degli avvolgimenti di lavoro e di avviamento vengono portate alle viti di contatto 4 situate nella scatola morsettiera 11. Il nucleo del rotore è assemblato da fogli 12 di acciaio elettrico e pressato sulla superficie ondulata della parte centrale dell'albero 1. Un avvolgimento in alluminio 14 con anelli di chiusura e pale della ventola viene versato nelle scanalature del rotore. Lo scopo della ventola è di lanciare aria calda verso le pareti esterne raffreddate del case.
![]()
Sul rotore è montato un interruttore centrifugo per l'avviamento dell'avvolgimento. È costituito da due leve 7 con contrappesi 9, posizionate sugli assi 8, che vengono pressate nelle quattro pale del ventilatore. Le leve vengono premute con i perni 6 sul manicotto di plastica 5, che si trova liberamente sull'albero. Quando il rotore accelera, quando la sua frequenza di rotazione si avvicina al valore nominale, i contrappesi divergono sotto l'influenza della forza centrifuga, ruotando le leve attorno agli assi.
In questo caso, il manicotto 5 si sposta verso destra, comprimendo la molla 10, e rilascia il contatto della molla 4, che chiude il circuito di avvolgimento di avviamento. Quando il rotore è fermo, questo contatto viene chiuso dall'estremità della boccola con il contatto stazionario 3.
I contatti mobili e fissi sono montati su un pannello isolante sul coperchio posteriore del motore elettrico 2. Su di esso è montato un relè termico che disconnette il motore elettrico dalla rete in caso di surriscaldamento. Il supporto 16 con quattro prigionieri viene utilizzato per montare il motore elettrico.
Lo schema di collegamento del motore elettrico è mostrato in Fig. 3-17.
La tensione di alimentazione viene fornita ai terminali C 1 e C 2. Da questi terminali, la tensione viene fornita all'avvolgimento di lavoro attraverso i contatti relè termico RT, costituito da un avvolgimento, una piattina bimetallica e contatti. Quando il motore elettrico si riscalda oltre il limite consentito, la piastra si piega e apre i contatti. A cortocircuito Una grande corrente scorrerà attraverso l'avvolgimento del relè termico, la piastra si riscalderà rapidamente e aprirà i contatti. In questo caso gli avvolgimenti C di lavoro e P di avviamento saranno diseccitati, poiché entrambi sono alimentati tramite un relè termico. Pertanto, il relè termico protegge il motore elettrico sia dal sovraccarico che dai cortocircuiti.
L'avvolgimento di avviamento è alimentato dai terminali C 1 e C 2 tramite il ponticello C 2 - P 1, contatti dell'interruttore centrifugo VT, ponticello VT - RT, contatti del relè termico RT. All'avvio del motore elettrico, quando il rotore raggiunge il 70-80% della velocità nominale, i contatti dell'interruttore centrifugo si apriranno e l'avvolgimento di avviamento verrà disconnesso dalla rete. All'accensione del motore elettrico, quando la velocità del rotore diminuisce, i contatti dell'interruttore centrifugo si chiuderanno nuovamente e l'avvolgimento di avviamento verrà preparato per l'avviamento successivo.
Nella fig. La Figura 3-18 mostra il progetto di un motore elettrico asincrono di tipo ABE. Questi motori sono collegati a una rete con un avvolgimento ausiliario costantemente acceso, nel cui circuito è collegato un condensatore in serie (Fig. 3-9). I motori elettrici di tipo ABE non hanno la carcassa rigida e quindi sono detti integrati. I motori elettrici sono collegati al meccanismo di azionamento mediante una flangia o una staffa.
L'alloggiamento del motore elettrico è il pacco del nucleo statorico 1, costituito da lamiere di acciaio elettrico spesse 0,5 mm. La confezione viene pressata e riempita sotto pressione lega di alluminio. Alle estremità dello statore sono presenti 5 anelli di pressione e quattro aste in alluminio che li serrano. Le fessure dello statore contengono le bobine 6 degli avvolgimenti di lavoro e ausiliari. Scudi dei cuscinetti 4 e 7. Le estremità degli avvolgimenti 8 vengono fatte uscire attraverso la boccola di gomma 9 nello scudo del cuscinetto per collegarle alla rete. Gli scudi dei cuscinetti sono serrati con quattro prigionieri.
Il rotore del motore elettrico è assemblato da fogli di acciaio elettrico e riempito di alluminio 2. Insieme all'avvolgimento del rotore vengono fuse le ali della ventola per raffreddare il motore elettrico. Il rotore ruota su due cuscinetti a sfera 3.
I motori elettrici hanno designazioni di tipo letterale e numerico, ad esempio il motore elettrico AVE 041-2 viene decifrato come segue: A - asincrono, B - integrato, E - monofase,
4 è il numero della dimensione, 1 è il numero di serie della lunghezza del nucleo dello statore e il numero 2 separato da un trattino è il numero di poli.
3-8. MOTORI ELETTRICI SINCRONI MONOFASE
In alcuni casi sono necessari motori elettrici la cui velocità di rotazione deve essere rigorosamente costante indipendentemente dal carico. Pertanto vengono utilizzati motori elettrici sincroni, in cui la velocità del rotore è sempre uguale alla frequenza di rotazione del campo magnetico ed è determinata da (3-2). Esistono molti tipi di motori elettrici sincroni, sia trifase che monofase. Qui consideriamo solo i due tipi più semplici di motori elettrici sincroni monofase: a riluttanza e a riluttanza del condensatore.

Nella fig. La Figura 3-19 mostra uno schema di progettazione del più semplice motore a riluttanza monofase, noto nella tecnologia come ruote La Cura. Statore 1 e rotore 2 sono assemblati da lamiere stampate di acciaio elettrico. Una bobina alimentata da una rete di corrente alternata monofase è avvolta sullo statore, creando un campo magnetico pulsante. Il motore a riluttanza prende il nome perché il rotore ruota a causa della reazione di due forze di attrazione magnetica.
Con un campo pulsante, il motore elettrico non ha coppia di avviamento e deve essere fatto girare a mano. Le forze magnetiche che agiscono sui denti del rotore tendono sempre a posizionarlo di fronte ai poli dello statore, poiché in questa posizione la resistenza al flusso magnetico sarà minima. Tuttavia, il rotore, per inerzia, supera questa posizione nel momento in cui il campo pulsante diminuisce. Con il successivo aumento del campo magnetico, le forze magnetiche agiscono su un altro dente del rotore e la sua rotazione continuerà. Per la stabilità, il rotore di un motore a reazione deve avere un'elevata inerzia.
I motori a reazione funzionano stabilmente solo a una bassa velocità di rotazione dell'ordine di 100-200 giri al minuto. La loro potenza solitamente non supera i 10-15 W. La frequenza di rotazione del rotore è determinata dalla frequenza della rete di alimentazione f e dal numero di denti del rotore Z. Poiché durante un semiciclo di variazione del flusso magnetico il rotore ruota di 1/Z di giro, quindi in 1 minuto, contenente 60 2 f semicicli, girerà di 60 2 giri f/Z. Con una frequenza di corrente alternata di 50 Hz la velocità del rotore è:
![]()
Per aumentare la coppia, viene aumentato il numero di denti sullo statore. L'effetto maggiore può essere ottenuto realizzando tanti denti sullo statore quanti sul rotore. In questo caso, le attrazioni magnetiche agiranno contemporaneamente non su una coppia di denti, ma su tutti i denti del rotore e la coppia aumenterà in modo significativo. In tali motori elettrici, l'avvolgimento dello statore è costituito da piccole bobine che vengono avvolte attorno al bordo dello statore negli spazi tra i denti. I vecchi tipi di giradischi elettrici utilizzavano un motore elettrico con 77 denti sullo statore e sul rotore, che forniva una velocità di rotazione del disco di 78 giri al minuto. Il rotore era solidale al disco su cui era posto il disco. Per avviare il motore elettrico bisognava spingere il disco con il dito.
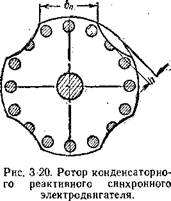
Lo statore di un motore sincrono a riluttanza con condensatore non è diverso dallo statore di un motore asincrono con condensatore. Il rotore di un motore elettrico può essere ricavato dal rotore di un motore elettrico asincrono fresando al suo interno delle scanalature in base al numero di poli (Fig. 3-20). In questo caso, le aste della gabbia dello scoiattolo vengono parzialmente tagliate. Nella produzione in fabbrica di tali motori elettrici con lamiere del rotore stampate con sporgenze polari, parte delle aste della gabbia di scoiattolo svolge il ruolo di avvolgimento di avviamento. Il rotore inizia a ruotare allo stesso modo del rotore di un motore a induzione, quindi viene portato in sincronismo con il campo magnetico e quindi ruota ad una frequenza sincrona.
Qualità del lavoro motore a condensatore dipende fortemente dalla modalità operativa in cui il motore elettrico ha un campo rotante circolare. L'ellitticità del campo in modalità sincrona porta ad un aumento del rumore, delle vibrazioni e all'interruzione dell'uniformità della rotazione. Se un campo rotante circolare si verifica in modalità asincrona, il motore elettrico ha una buona coppia di spunto, ma piccoli momenti di entrata e uscita dal sincronismo. Quando il campo circolare si sposta verso frequenze più alte, la coppia di spunto diminuisce e aumentano i momenti di entrata e di uscita dal sincronismo. Momenti più belli ingresso e uscita dal sincronismo si ottengono nel caso in cui il campo rotante circolare avvenga in modalità sincrona. In questo caso però la coppia di spunto risulta notevolmente ridotta. Per aumentarla, di solito si aumenta leggermente la resistenza attiva dell'avvolgimento del rotore cortocircuitato.
Uno svantaggio di alcuni tipi di motori a riluttanza con condensatore è l'inceppamento del rotore, il che significa che all'avvio il rotore non gira, ma si ferma in una posizione.
Tipicamente, l'inceppamento del rotore si verifica nei motori elettrici con una relazione sfavorevole tra le dimensioni delle fossette e le sporgenze dei poli. La coppia reattiva più elevata con una piccola potenza consumata dal motore elettrico si ottiene quando il rapporto tra l'arco polare b p e la divisione polare t è di circa 0,5-0,6 e la profondità delle depressioni h è 9-10 volte maggiore dell'aria spazio tra le sporgenze polari e lo statore.
Una proprietà positiva dei motori a riluttanza dei condensatori è il loro elevato fattore di potenza, che è significativamente superiore a quello dei motori elettrici trifase, raggiungendo talvolta 0,9-0,95. Ciò è spiegato dal fatto che l'induttanza di un motore a condensatore è ampiamente compensata dalla capacità del condensatore.
I motori sincroni a riluttanza sono i motori sincroni più comuni grazie alla loro semplicità di progettazione, al basso costo e all'assenza di contatti striscianti. Hanno trovato applicazione nei circuiti di comunicazione sincrona, nel cinema sonoro, nella registrazione del suono e nelle installazioni televisive.
3-9. UTILIZZO DEI MOTORI ELETTRICI A INDUZIONE TRIFASE COME MOTORI MONOFASE
In pratica, ci sono casi in cui è necessario collegare un motore elettrico trifase a una rete monofase. In precedenza, si riteneva che ciò richiedesse il riavvolgimento dello statore del motore elettrico. Attualmente sono stati sviluppati e testati nella pratica molti schemi per il collegamento di motori elettrici trifase a una rete monofase senza alcuna modifica agli avvolgimenti dello statore.
I condensatori sono usati come elementi di partenza.
I terminali dell'avvolgimento dello statore di un motore elettrico trifase hanno le seguenti designazioni: C1—inizio della prima fase; C2: inizio della seconda fase; NW: inizio della terza fase; C4 - fine della prima fase; C5 - fine della seconda fase; C6: fine della terza fase. Queste designazioni sono stampigliate su targhette metalliche poste sui conduttori degli avvolgimenti.
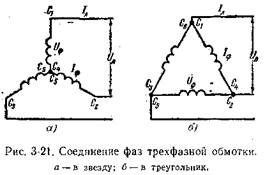
L'avvolgimento di un motore elettrico trifase può essere collegato in una stella (Fig. 3-21, a) o in un triangolo (Fig. 3-21, b). Quando ci si collega a stella, l'inizio o la fine di tutte e tre le fasi sono collegati a un punto e i restanti tre terminali sono collegati a rete trifase. Quando si collega in un triangolo, la fine della prima fase è collegata all'inizio della seconda, la fine della seconda all'inizio della terza e la fine della terza all'inizio della prima. Dai punti di connessione vengono prelevati i cavi per collegare il motore elettrico ad una rete trifase.
In un sistema trifase si distinguono tensioni e correnti di fase e lineari. Quando sono collegati a una stella, tra loro si verificano le seguenti relazioni:
quando sono collegati in un triangolo
La maggior parte dei motori elettrici trifase sono prodotti per due tensioni lineari, ad esempio 127/220 V o 220/380 V. Con tensioni di rete inferiori l'avvolgimento è collegato a triangolo e con tensioni più elevate a stella. Per tali motori elettrici, tutti e sei i conduttori di uscita dell'avvolgimento vengono portati sulla scheda: morsetti.
Esistono però motori elettrici per una tensione di rete, in cui l'avvolgimento è collegato a stella o a triangolo all'interno del motore elettrico e solo tre conduttori sono collegati alla morsettiera. Naturalmente, in questo caso sarebbe possibile smontare il motore elettrico, disconnettere le connessioni interfase e trarre tre ulteriori conclusioni. Tuttavia, non è necessario farlo utilizzando uno degli schemi per il collegamento di un motore elettrico a una rete monofase, riportati di seguito.
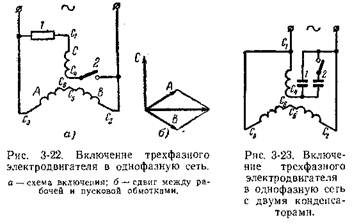
Uno schema schematico del collegamento di un motore elettrico trifase con sei terminali a una rete monofase è mostrato in Fig. 3-22, a. Per fare ciò, due fasi sono collegate in serie e collegate a una rete monofase, e la terza fase è collegata ad esse in parallelo, incluso un elemento di partenza 1 con un interruttore 2. Una resistenza attiva o un condensatore possono fungere da elemento di partenza. In questo caso, l'avvolgimento di lavoro occuperà 2/3 delle fessure dello statore e l'avvolgimento iniziale occuperà 1/3. Pertanto, l'avvolgimento trifase fornisce il rapporto richiesto di fessure tra gli avvolgimenti di lavoro e quelli di avviamento. Con questo collegamento l'angolo tra l'avvolgimento di lavoro e quello di avviamento è di 90° el. (Fig. 3-22, b).
Quando si collegano due fasi in serie, è necessario assicurarsi che siano accese in conformità e non in modo opposto a quando n. Con. delle fasi collegate vengono sottratte. Come si può notare dal diagramma in Fig. 3-22, a, le estremità della seconda e terza fase C 5 e C 6 sono collegate ad un punto comune.
Un motore elettrico trifase può essere utilizzato anche come motore a condensatore secondo lo schema di Fig. 3-23 con un condensatore funzionante 1 o con condensatori funzionanti 1 e avviamento 2. Con questo schema di connessione, la capacità del condensatore di lavoro, μF, è determinata dalla formula:
dove I è la corrente nominale del motore elettrico, A; U—tensione di rete, V.
Un motore elettrico trifase con tre terminali e un avvolgimento dello statore collegato a stella è collegato a una rete monofase secondo lo schema di Fig. 3-24. In questo caso, la capacità del condensatore di lavoro è determinata dalla formula
Tensione del condensatore U 1 = 1,3 U.
Un motore elettrico trifase con tre terminali e un avvolgimento statorico collegato a triangolo è collegato a una rete monofase secondo lo schema di Fig. 3-25. La capacità del condensatore di lavoro è determinata dalla formula
Tensione del condensatore U=1,15 V.
In tutti e tre i casi la capacità condensatori di avviamento può essere determinato approssimativamente dalla relazione
![]()
Quando si sceglie un circuito di connessione, è necessario concentrarsi sulla tensione per la quale è progettato il motore elettrico trifase e sulla tensione della rete monofase. In questo caso, la tensione di fase della trifase

Esempio. Motore elettrico trifase con potenza di 250 W, tensione 127/220 V con corrente nominale 2/1,15 A deve essere collegato ad una rete monofase con tensione di 220 V.
Quando si utilizza il diagramma di Fig. Capacità del condensatore di lavoro 3-24:
![]()
tensione ai capi del condensatore U 1 = 1,3 220 = 286 V.
Avviare la capacità del condensatore
Quando si utilizza un motore elettrico trifase come monofase, la sua potenza è ridotta al 50% e quando viene utilizzato come motore monofase a condensatore, viene ridotta al 70% della potenza nominale di un motore elettrico trifase. motore.
N.V. Vinogradov, Yu.N. Vinogradov
Come calcolare e realizzare da solo un motore elettrico
Mosca 1974
Aree di applicazione. Vengono utilizzati motori asincroni a bassa potenza (15 - 600 W). dispositivi automatici ed elettrodomestici per l'azionamento di ventilatori, pompe e altre apparecchiature che non richiedono il controllo della velocità. I micromotori monofase vengono solitamente utilizzati negli elettrodomestici e nei dispositivi automatici, poiché questi apparecchi e dispositivi sono solitamente alimentati da una rete CA monofase.
Principio di funzionamento e dispositivo motore monofase. Avvolgimento statorico di un motore monofase (Fig. 4.60, UN) situato in scanalature che occupano circa i due terzi della circonferenza dello statore, che corrisponde ad una coppia di poli. Di conseguenza
(vedi Capitolo 3) la distribuzione dell'MMF e dell'induzione nel traferro è quasi sinusoidale. Poiché l'avvolgimento passa AC,L'MDS pulsa a tempo con la frequenza della rete. Induzione in un punto arbitrario del traferro
Bx = In m sinωtcos (πх/τ).
Pertanto, in un motore monofase, l'avvolgimento dello statore crea un flusso stazionario che varia nel tempo e non un flusso rotatorio circolare, come nei motori trifase con alimentazione simmetrica.
Per semplificare l'analisi delle proprietà di un motore monofase, presentiamo la (4.99) nella forma
B x = 0,5 V t sin (ωt - πх/τ) + 0,5 V t sin (ωt + πх/τ),.
cioè sostituiamo il flusso pulsante stazionario con una somma di campi circolari identici ruotanti in direzioni opposte e aventi le stesse frequenze di rotazione: N 1pr = N 1 giro = N 1. Poiché le proprietà di un motore asincrono con campo rotante circolare sono discusse in dettaglio nei § 4.7 - 4.12, l'analisi delle proprietà di un motore monofase può essere ridotta a considerare l'azione combinata di ciascuno dei campi rotanti. In altre parole, un motore monofase può essere rappresentato come due motori identici, i cui rotori sono rigidamente collegati tra loro (Fig. 4.60, b), con i campi magnetici e le coppie da essi create che ruotano in direzione opposta M A M arr. Un campo il cui senso di rotazione coincide con il senso di rotazione del rotore è detto diretto; campo di direzione inversa - inverso o inverso.
Supponiamo che il senso di rotazione dei rotori coincida con il senso di uno dei campi rotanti, ad esempio con n ave quindi lo scorrimento del rotore rispetto al flusso F pr
spr = (n 1pr - n 2)/n 1pr = (n 1 - n 2)/n 1 = 1 - n 2 /n 1..
Scorrimento del rotore rispetto alla portata F arr.
s arr = (n 1arr + n 2)/n 1arr = (n 1 + n 2)/n 1 = 1 + n 2 /n 1..
Dalle (4.100) e (4.101) segue che
s o6p = 1 + n 2 /n 1 = 2 - s pr..
Momenti elettromagnetici M A M verso sono dirette le immagini formate dai campi diretto e inverso lati opposti e la coppia risultante di un motore monofase M il taglio è uguale alla differenza di coppia alla stessa velocità del rotore.
Nella fig. 4.61 mostra la dipendenza M = f(s) per un motore monofase. Osservando la figura possiamo trarre le seguenti conclusioni:
a) un motore monofase non ha coppia di spunto; ruota nella direzione in cui è spinto da una forza esterna; b) la velocità di rotazione di un motore monofase al minimo è inferiore a quella di motore trifase, a causa della presenza di una coppia frenante generata dal campo inverso;
c) le caratteristiche prestazionali di un motore monofase sono peggiori di quelle di un motore trifase; ha uno scorrimento maggiore al carico nominale, un'efficienza inferiore, una capacità di sovraccarico inferiore, che si spiega anche con la presenza di un campo inverso;
d) la potenza di un motore monofase è circa 2/3 della potenza di un motore trifase della stessa taglia, poiché in un motore monofase l'avvolgimento di lavoro occupa solo 2/3 delle cave dello statore. Riempire tutti gli slot dello statore
poiché in questo caso il coefficiente di avvolgimento è piccolo, il consumo di rame aumenta di circa 1,5 volte, mentre la potenza aumenta solo del 12%.
Dispositivi di avviamento. Per ottenere la coppia di avviamento, i motori monofase hanno un avvolgimento di avviamento sfasato di 90 gradi elettrici rispetto all'avvolgimento principale di funzionamento. Durante il periodo di avvio, l'avvolgimento di avviamento è collegato alla rete tramite elementi di sfasamento: capacità o resistenza attiva. Dopo che il motore ha finito di accelerare, l'avvolgimento di avviamento viene spento, mentre il motore continua a funzionare come monofase. Poiché l'avvolgimento iniziale funziona solo per un breve periodo, è costituito da un filo di sezione inferiore rispetto a quello di lavoro ed è posizionato in un numero minore di scanalature.
Consideriamo in dettaglio il processo di avvio quando si utilizza la capacità C come elemento di sfasamento (Fig. 4.62, a). Sull'avvolgimento iniziale P voltaggio
Ú
1p = Ú
1 - Ú
C= Ú
1 +jÍ 1 N XC, cioè è sfasato rispetto alla tensione di rete U 1 attaccato all'avvolgimento funzionante R. Di conseguenza, i vettori attuali nel funzionamento IO 1p e programma di avvio IO Gli avvolgimenti 1p vengono sfasati di un certo angolo. Scegliendo la capacità del condensatore di sfasamento in un certo modo, è possibile ottenere una modalità operativa all'avvio quasi simmetrica (Fig. 4.62, b), cioè ottenere un campo rotante circolare. Nella fig. 4.62, vengono mostrate le dipendenze M = f(s) per il motore con l'avvolgimento di avviamento acceso (curva 1) e spento (curva 2). Il motore viene avviato in parti ab caratteristiche 1; al punto B l'avvolgimento di avviamento viene spento e quindi il motore funziona in parte сО caratteristiche 2.
Poiché la presenza di un secondo avvolgimento migliora notevolmente le caratteristiche meccaniche del motore, in alcuni casi vengono utilizzati motori monofase in cui gli avvolgimenti A e B
sempre acceso (Fig. 4.63, a). Tali motori sono chiamati motori a condensatore.
Entrambi gli avvolgimenti dei motori a condensatore occupano solitamente lo stesso numero di slot e hanno la stessa potenza. Quando si avvia un motore a condensatore, per aumentare la coppia di avviamento, è consigliabile avere una maggiore capacità C p + C p Dopo aver accelerato il motore secondo la caratteristica 2 (Fig. 4.63, b) e ridotto la corrente, parte dei condensatori. Cn viene spento in modo che nella modalità nominale (quando la corrente del motore diventa inferiore rispetto all'avvio) aumenti la capacità e garantisca il funzionamento del motore in condizioni prossime al funzionamento in un campo rotante circolare. In questo caso il motore funziona con la caratteristica 1.
Il motore a condensatore ha un cos φ elevato. I suoi svantaggi sono la massa e le dimensioni relativamente grandi del condensatore, nonché la presenza di una corrente non sinusoidale quando la tensione di alimentazione è distorta, che in alcuni casi porta a effetti dannosi sulla linea di comunicazione.
In condizioni di avviamento facile (coppia di carico ridotta durante il periodo di avviamento), vengono utilizzati motori con resistenza all'avviamento R(Fig. 4.64, a). Disponibilità resistenza attiva nel circuito dell'avvolgimento di partenza fornisce uno sfasamento φ p più piccolo tra la tensione e la corrente in questo avvolgimento (Fig. 4.64, b) rispetto allo sfasamento φ p nell'avvolgimento di lavoro. A questo proposito, le correnti nel lavoro e avvolgimenti di partenza risultano sfasati di un angolo φ p - φ p e formano un campo rotante asimmetrico (ellittico), grazie al quale si verifica la coppia iniziale. I motori con resistenza all'avviamento sono affidabili nel funzionamento e sono prodotti in serie. La resistenza di avviamento è integrata nella carcassa del motore ed è raffreddata dalla stessa aria che raffredda l'intero motore.
Micromotori monofase con poli schermati. In questi motori, l'avvolgimento dello statore collegato alla rete è solitamente concentrato e montato su poli salienti (Fig. 4.65, a), i cui fogli sono stampati insieme allo statore. In corrispondenza di ciascun polo una delle punte è ricoperta da un avvolgimento ausiliario costituito da una o più spire cortocircuitate che schermano da 1/5 a 1/2 dell'arco polare. Il rotore del motore è di tipo convenzionale a gabbia di scoiattolo.
Il flusso magnetico della macchina creato dall'avvolgimento dello statore (flusso polare) può essere rappresentato come la somma di due componenti (Fig. 4.65, b) F p = F p1 + F p2, dove F p1 è il flusso che passa attraverso la parte del polo non coperto dal cortocircuito con questa torsione; F p2 è il flusso che attraversa la parte del polo schermata da una bobina cortocircuitata.
I flussi Фп1 e Фп2 attraversano diverse parti dell'espansione polare, cioè sono spostati nello spazio di un angolo β. Inoltre, sono sfasati rispetto al MMF F n avvolgimenti dello statore con angoli diversi - γ 1 e γ 2. Ciò è spiegato dal fatto che ciascun polo del motore descritto può essere considerato, in prima approssimazione, come un trasformatore, il cui avvolgimento primario è l'avvolgimento statorico, e l'avvolgimento secondario è una spira cortocircuitata. Il flusso dell'avvolgimento dello statore induce una fem nella bobina cortocircuitata E a (Fig. 4.65, c), a seguito della quale si verifica una corrente IO k e MDS F k, piegatura con MDS F n avvolgimenti dello statore. Componente di corrente reattiva IO k riduce il flusso Ф p2 e quello attivo lo sposta in fase rispetto alla MMF F p Poiché il flusso Ф p1 non copre la spira cortocircuitata, l'angolo γ 1 ha un valore relativamente piccolo (4-9°) - circa uguale all'angolo di sfasamento tra il flusso del trasformatore e l'MMF del primario. avvolgimento in modalità velocità al minimo. L'angolo γ 2 è molto più grande (circa 45°), cioè lo stesso di un trasformatore con avvolgimento secondario cortocircuitato (ad esempio in un trasformatore di misura di corrente). Ciò si spiega con il fatto che le perdite di potenza, da cui dipende l'angolo γ 2, sono determinate non solo dalle perdite di potenza magnetica nell'acciaio, ma anche dalle perdite elettriche nella spira cortocircuitata.
Riso. 4.65. Schemi di progetto di un motore monofase a poli schermati e suoi
diagramma vettoriale:
1
- statore; 2 -
avvolgimento dello statore; 3 -
cortocircuitato
giro; 4 -
rotore; 5
- palo
I flussi Фп1 e Фп2, spostati nello spazio di un angolo β e sfasati nel tempo di un angolo γ = γ 2 - γ l, formano un campo magnetico rotante ellittico (vedi Capitolo 3), che produce una coppia agente sul rotore di il motore nel senso dalla prima espansione polare, non coperta dalla spira cortocircuitata, alla seconda punta (secondo l'alternanza dei flussi massimi delle “fasi”).
Per aumentare la coppia di spunto del motore in questione avvicinando il suo campo rotante ad uno circolare, vari modi: tra le espansioni polari dei poli adiacenti sono installati shunt magnetici che rafforzano la connessione magnetica tra l'avvolgimento principale e la spira cortocircuitata e migliorano la forma del campo magnetico nel traferro; aumentare il traferro sotto la punta, che non viene coperto dalla spira cortocircuitata; usa due e Di più cortocircuitato accende una punta con angoli di copertura diversi. Esistono anche motori senza spire cortocircuitate sui poli, ma con sistema magnetico asimmetrico: diverse configurazioni delle singole parti del polo e diversi traferri. Tali motori hanno una coppia di spunto inferiore rispetto ai motori con poli schermati, ma la loro efficienza è maggiore poiché non presentano perdite di potenza nelle spire cortocircuitate.
I progetti considerati di motori con poli schermati sono irreversibili. Per implementare la retromarcia in tali motori, invece delle spire cortocircuitate, vengono utilizzate le bobine B1, B2, B3 E B4(Fig. 4.65, V), ognuno dei quali copre mezzo palo. Cortocircuitare una coppia di bobine B1 E B4 O B2 E B3,è possibile schermare l'una o l'altra metà del polo e modificare così il senso di rotazione del campo magnetico e del rotore.
Un motore con poli ombreggiati presenta una serie di svantaggi significativi: relativamente grande dimensioni complessive e massa; basso cos φ ≈ 0,4 ÷ 0,6; basso rendimento η = 0,25 ÷ 0,4 a causa delle grandi perdite nella bobina cortocircuitata; piccola coppia di avviamento, ecc. I vantaggi del motore sono la semplicità del design e, di conseguenza, l'elevata affidabilità di funzionamento. A causa dell'assenza di denti sullo statore, il rumore del motore è insignificante, quindi viene spesso utilizzato nei dispositivi per la riproduzione di musica e parlato.