Senzori de mișcare liniară - nuanțe principale
Departamentul de Inginerie și Tehnologie Electronică
ABSTRACT
Pe subiect:
„Senzori de mișcare »
MINSK, 2008
Una dintre componentele care determină precizia oricărui sistem de poziționare sunt senzorii de deplasare. Senzorii de deplasare sunt proiectați pentru a converti cantitățile mișcare liniară sau unghiul de rotație al șurubului de plumb într-un cod unitar: o succesiune simplă de impulsuri electrice de durată și amplitudine egală, al căror număr este direct proporțional cu cantitatea de mișcare unghiulară sau liniară.
Senzori inductivi
Pentru a converti cantitățile aflate în schimbare continuă în impulsuri electrice discrete, senzorii inductivi și optici sunt utilizați pe scară largă.
Circuitul senzorului inductiv este prezentat în Figura 1.
Figura 1 - Circuitul senzorului inductiv.
Pe partea mobilă a mașinii este instalată o șină subțire din material magnetic moale. Proeminențele rack-ului 1 modulează rezistența magnetică a spațiului de lucru la mișcare. Miezul magnetic al miezului în formă de W 2 are două înfășurări legate între ele și alimentate de la transformatorul Tr. Diagonala punții inductive este inclusă metru. În poziția de mijloc, puntea de măsurare este echilibrată și acul instrumentului 3 va fi la zero. Un dezechilibru ușor face ca acul instrumentului să se devieze. Un senzor bine realizat va detecta mișcări de ~2 µm. Pentru circuitele discrete, este necesar un convertor digital-analogic (DAC).
Senzori foto-optici de deplasare.
Pe șurubul de plumb există un disc cu un număr mare de sloturi (de la 100 la 800). Lumina de la lampă este direcționată printr-o lentilă cilindrică sub forma unui fascicul îngust către disc și fotodetector (fotodiodă). Cu un pas de șurub de 2 mm și un număr de fante pe disc de 400, fiecare impuls electric va avea o discretitate de ~0,001 mm, numărul de fante crește la 2000 și diametrul discului crește la 600 mm, ceea ce este inacceptabil.
Puteți instala discul de numărare nu pe șurubul de plumb, ci pe arborele de mare viteză asociat cu acesta. Dar acest lucru va reduce precizia citirii din cauza erorilor de transmisie.
Senzori de mișcare liniară de precizie
Senzorii de deplasare liniară de precizie sunt construiți pe baza unor scale raster, rețele de difracție metrologică și interferometre laser. Primele două tipuri de DLP se bazează pe același principiu de control al mișcării. Au o scară lungă sub formă de lovituri aplicate periodic și o scară de vedere scurtă cu aceeași perioadă sau mai multe perioade de lovituri și găuri. Dacă frecvența spațială a dispoziției curselor pe scale nu depășește 50-100 mm -1, acestea se numesc scale raster, iar dacă este peste 100 mm -1 - rețele de difracție metrologică (sau rețele de difracție). Deoarece discretitatea mișcărilor este adesea mai mică de 1 micron, s-ar părea că cu cât frecvența loviturilor este mai mare, cu atât este mai ușor să proiectați circuite pentru generarea de impulsuri electrice. Cu toate acestea, simpla înlocuire a scărilor raster cu rețele de difracție este complicată de o serie de efecte care apar în acest caz, făcând DLP-ul sensibil la modificările distanței dintre măsură și scara de vizualizare, lungimea de undă etc. Sisteme bazate pe scale raster. rețelele de difracție au două varietăți - sisteme de acumulare și sisteme care utilizează picturile cu efect moire
Sisteme de acumulare
Sistemele de acumulare folosesc un sistem de rețele optice reflectorizante sau transmisoare. Designul unui DLP optic cu un grătar reflectorizant este prezentat în Fig. 2. Diafragma capului de scanare conține 4 fante. Fantele sunt plasate astfel încât semnalele de ieșire ale fotodetectorilor să fie deplasate cu un sfert din perioada de măsurare a rețelei. Deci semnalele, datorită deplasării fantelor, sunt deplasate în fază și semnalele cvasi-sinusoidale ale fotodetectorilor. Rezoluția unor astfel de sisteme este de 0,5 microni, care cu o eroare totală de cel mult 1 micron pentru măsurarea mișcărilor în intervalul 1-2 cm.
Dezavantajul metodei: este necesară paralelismul strict al liniilor de zgârietură și al riglei motorului. Al doilea sistem de grătare folosește metoda franjuri moiré.
Metoda dungi Moire.
Dungile moiré sunt un sistem de zone întunecate formate prin suprapunerea și evidențierea a două grătare identice ușor decalate la un unghi unul față de celălalt.

Figura 2 - Deplasări DLP cu un grătar reflectorizant.
1 – sursa de lumina, 2 – lentile condensatoare, 3 – scara de otel cu grilaj, 4 – diafragma, 5 – fotodetector.
Când grătarele sunt deplasate unul față de celălalt, zonele (întunecate și luminoase) se deplasează una față de alta în sus și în jos cu o distanță l. P este pasul rețelei, θ este unghiul de înclinare.
Principalele avantaje ale metodei: (optic reflectorizant)
1. Modelul moiré nu depinde de lungimea de undă a luminii pe o gamă relativ largă de lungimi de undă. Acest lucru permite utilizarea lămpilor incandescente obișnuite în miniatură ca sursă de lumină.
2. contrastul ridicat al modelului moiré este menținut cu spații relativ mari (până la zece mm) între grătare.
3. Pasul modelului moiré poate corespunde unei valori de deplasare de câteva ori mai mică decât distanța dintre cursele grătarului.
Un model moiré se formează la ieșirea dintr-un grătar transparent. Lățimea liniară a perioadei modelului moiré este:
 , (1)
, (1)
unde d 1 este constanta rețelei transparente, θ este unghiul de rotație al curselor.
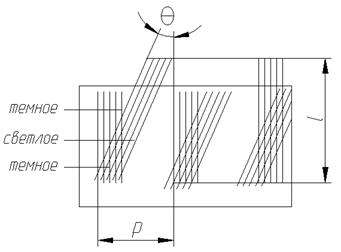
Figura 3 - Schema formării dungilor moire.
În DLP, acest unghi este de aproximativ 10 -4, astfel încât o mișcare a rețelei de 1 μm corespunde unei deplasări a modelului moiré cu 10 mm, care este ușor de înregistrat de un fotodetector.
De obicei sunt suficiente doi fotodetectori. Când vă deplasați în ele, sunt generate semnale:
I 1 = k 1 (E 0 + Ecos2πX/ε)(2)
I 2 = k 2 (E 0 ± Esin2πX/ε), (3)
unde k 1, k 2 este sensibilitatea fotodetectorului, E 0 este nivelul componentei constante și amplitudinea componentei variabile a iluminării modelului moiré, X este cantitatea de mișcare,
- prețul perioadei de pictură moiré.d 2 este constanta rețelei de reflectare, q i este ordinul maximului de difracție.
Deoarece 80% din energia de reflectare apare la al 2-lea maxim de reflexie cu riscuri isoscele, atunci q = 2, ε = d 2 /4.
La determinarea poziției cu o precizie de ±ε, apar dificultăți de interpolare din cauza fluctuațiilor iluminării constante E 0, care depinde de mulți factori, inclusiv fluctuațiile luminozității sursei de lumină, schimbarea reflectivității rețelelor etc.
Prin urmare, uneori fotodetectoarele situate de-a lungul modelului moire sunt utilizați în DLP cu o deplasare de un sfert din perioadă și sunt generate două semnale, fiecare dintre acestea reprezentând diferența dintre semnalele a doi fotodetectori situati la o distanță de jumătate din perioada intervalului. model moire.
Sisteme de poziționare cu interferometre laser
Dorința de a crește acuratețea sistemelor de poziționare, de a elimina dependența parametrilor acestora de precizia fabricării ghidajelor și uzura lor în timpul funcționării a condus la crearea unui nou tip de sisteme de poziționare cu interferometre laser.
Să explicăm calitativ, fără a apela la formule, cum funcționează un interferometru laser.
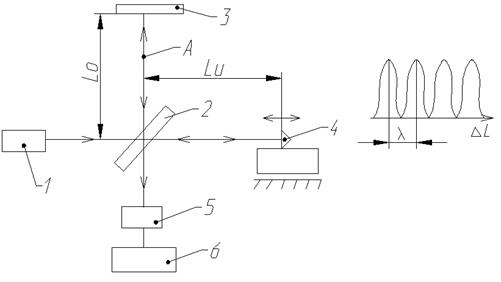
Figura 4 - Schema optică a interferometrului laser.
1 – laser, 2 – oglindă translucidă, 3 – oglindă reflectorizantă fixă, 4 – reflector montat pe o parte mobilă, 5 – fotodetector, 6 – dispozitiv electronic de prelucrare a datelor.
Fasciculul care iese dintr-un laser cu heliu-neon de putere redusă este împărțit de o oglindă translucidă în două fascicule - un fascicul de referință și un fascicul de măsurare. Fasciculul de referință A trece pe calea optică de la oglinda 2 la oglinda 3 și apoi la fotodetectorul 5. Fasciculul de măsurare B se îndreaptă către reflectorul montat pe piesa mobilă, apoi revine și intră în fotodetector. Ca rezultat, ambele fascicule se întâlnesc și interferează în fotodetector. Intensitatea luminii înregistrată de fotodetector depinde de diferența dintre lungimile căilor optice ale ambelor fascicule.
Δl = L și – L o . (4)
Să presupunem că la un moment dat ambele fascicule, grinzile de referință și cele de măsurare, s-au întâlnit în aceeași fază. Aceasta înseamnă că în acest moment fotodetectorul va înregistra intensitatea maximă a luminii. Dar dacă piesa, împreună cu reflectorul 4, începe să se miște, și lungimea traseului de măsurare L începe să se modifice. De îndată ce Δl se modifică cu jumătate din lungimea de undă a luminii generate de laser, adăugarea de fascicule în fotodetector va avea loc în antifază, iar fotodetectorul va înregistra radiația minimă - „întuneric”. Calea fasciculului de măsurare se modifică cu o altă jumătate a lungimii de undă și este din nou lumină în fotodetector, următoarea jumătate a lungimii de undă este din nou întunecată. etc. – lumină-întuneric, deschis-întuneric.
Astfel, când Δl se modifică cu λ/2, intensitatea luminii din fotodetector se modifică de la maxim la minim sau invers. Dacă reflectorul este deplasat de N ori, aceasta înseamnă că piesa (suportul) s-a deplasat la o distanță λN/2. Numărul N este numărat de dispozitivul electronic 6. Astfel, mișcarea piesei este măsurată în lungimi de undă.
Folosind interferometre laser, se măsoară deplasările de la sutimi de microni la câteva zeci de metri.
În practică, un interferometru laser funcționează de obicei împreună cu un dispozitiv de control al software-ului mașinii. Prin urmare, simultan cu controlul mișcării, se realizează corectarea automată a acestora.
1 – cap de lucru (tub); 2, 3 – vagoane; 4 – oglinzi; 6 – capete de măsurare; 7 – separator; 8 - laser; 9 – prismă.
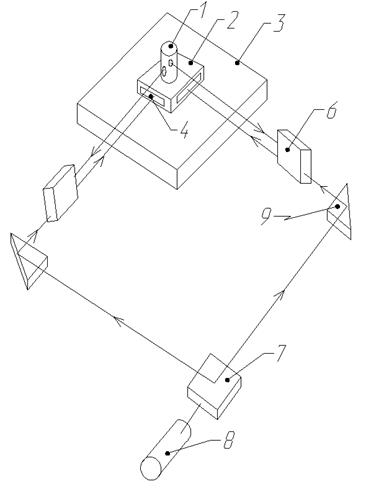
Figura 5 - Diagrama unui tabel de coordonate cu un interferometru laser.
Figura 5 prezintă o diagramă a unui tabel de coordonate cu un interferometru laser. O astfel de masă are două oglinzi perpendiculare reciproc instalate pe căruciorul superior, care sunt brațe mobile ale interferometrelor. Două oglinzi fixe sau interferometre sunt instalate pe tubul capului de lucru.
Astfel, interferometrele numără mișcările reciproce de-a lungul a două axe ale căruciorului superior în raport cu un sistem de coordonate fix. Oglinzile pot fi fabricate cu o planeitate destul de mare, care se încadrează în zecimi de micron. Nu se uzează în timpul funcționării, astfel încât precizia inerentă acestora este menținută pentru o lungă perioadă de timp. Pentru a asigura perpendicularitatea reciprocă a oglinzilor cu o precizie de fracțiuni de secunde de arc, se folosesc tehnici optice speciale. Precizia tabelului de coordonate depinde în mare măsură de precizia interferometrelor. Precizia numărării mișcărilor este influențată de doi factori - instabilitatea frecvenței radiației laser și modificările lungimii de undă ale radiației datorate fluctuațiilor temperaturii, presiunii și umidității ambiante. Problemă de stabilizare a frecvenței radiatii laserîn prezent este aproape rezolvată, în plus, corectarea erorilor este posibilă folosind informații de la senzorii de temperatură, presiune și umiditate folosind un computer.
LITERATURĂ
1. Proiectarea echipamentelor radio-electronice: Manual. manual pentru universități / O.V. Alekseev, A.A. Pivovarov, etc.; Ed. O.V. Alekseeva. – M.: Mai sus. şcoală, 2000. – 479 p.
2. Tehnologia dispozitivelor radio-electronice și automatizarea producției: Manual / A.P. Dostanko, V.L. Lanin, A.A. Khmyl, L.P. Anufriev; Sub general ed. A.P. Dostanko. – Mn.: Mai sus. scoala, 2002
3. Manualul designerului REA: Principii generale design / Ed. R.G. Varlamova. - M.: Radio, 2000.
Este ușor să trimiți munca ta bună la baza de cunoștințe. Utilizați formularul de mai jos
Studenții, studenții absolvenți, tinerii oameni de știință care folosesc baza de cunoștințe în studiile și munca lor vă vor fi foarte recunoscători.
Postat pe http://www.allbest.ru/
Ministerul Educației și Științei al Federației Ruse
Stat federal autonom institutie de invatamant studii superioare
„Universitatea Națională de Cercetare Politehnică din Tomsk”
Institutul de Energie
Direcția de formare (specialitatea) 140400 „Inginerie electrică și inginerie electrică” (Dispozitive electrice și electronice)
Departamentul de Complexe și Materiale de Inginerie Electrică
NOTĂ EXPLICATIVE
pentru un proiect/lucrare de curs
la disciplina „Dispozitive electronice și electrice ale sistemelor de automatizare”
pe subiect" Senzormișcare liniară"
Completat de student gr. 5G 2G
V.A. Goncharov
Supraveghetor
E.P. Bogdanov
Tomsk 2015
1. Senzor de mișcare
1.1 Senzori capacitivi de deplasare
1.2 Senzori optici de mișcare
1.3 Senzori inductivi de deplasare
1.4 Senzori de deplasare cu curent Eddy
1.5 Senzori de deplasare cu ultrasunete
1.6 Senzori de deplasare magnetorezistiv
1.7 Senzori cu efect Hall
1.8 Senzori de deplasare magnetostrictivi
1.9 Senzori potențiometrici de deplasare
1.10 Senzor inductiv mișcări tip LVDT seria SM
2. Partea de calcul
2.1 Date inițiale pentru calcul
2.2 Calcul electromagnetic
2.3 Calcul termic
3. Definirea parametrilor și construcția caracteristicilor
3.1 Determinarea neliniarității caracteristicii tensiunii de ieșire a senzorului de deplasare liniară LDT
3.2 Caracteristica ieșirii senzorului
3.3 Graficul coeficientului pantei de ieșire
3.4 Construcția caracteristicii de sarcină
Concluzie
Referințe
1. Senzor de mișcare
Senzor de mișcare este un dispozitiv conceput pentru a determina magnitudinea mișcării mecanice liniare sau unghiulare a unui obiect. Desigur, astfel de dispozitive au un număr colosal de aplicații practice într-o mare varietate de domenii, așa că există multe clase de senzori de mișcare care diferă prin principiul de funcționare, precizie, preț și alți parametri. Trebuie remarcat imediat că toți senzorii de deplasare pot fi împărțiți în două categorii principale - senzori de mișcare liniarăŞi Senzori de deplasare unghiulară(codificatoare). În această revizuire, accentul principal se va pune pe senzorii de mișcare liniară.
Conform principiului de funcționare, senzorii de deplasare pot fi:
Capacitiv
Optic
· Inductiv
· Curent turbionar
cu ultrasunete
Magnetorezistiv
Potențiometrice
Magnetostrictive
Bazat pe efectul Hall
1.1 Senzori capacitivi de deplasare
Funcționarea senzorilor de acest tip se bazează pe relația dintre capacitatea condensatorului și configurația geometrică a acestuia. În cel mai simplu caz, vorbim despre o modificare a distanței dintre plăci datorită influenței fizice externe (Fig. 1). Deoarece capacitatea condensatorului variază invers proporțional cu dimensiunea spațiului dintre plăci, determinarea capacității cu alți parametri cunoscuți ne permite să judecăm distanța dintre plăci. O modificare a capacității poate fi înregistrată în diferite moduri (de exemplu, prin măsurarea impedanței acesteia), dar în orice caz condensatorul trebuie inclus în circuitul electric.
Orez. 1. Senzor de deplasare liniar capacitiv cu dimensiune variabilă a golului.
Un alt circuit în care este parametrul de ieșire capacitate electrică, este un circuit care conține un condensator cu un dielectric în mișcare (Fig. 2). Deplasarea plăcii dielectrice între plăcile condensatorului duce, de asemenea, la o schimbare a capacității sale. Placa poate fi conectată mecanic la obiectul de interes, caz în care modificarea capacității indică mișcarea obiectului. În plus, dacă obiectul în sine are proprietăți dielectrice și are dimensiuni adecvate, acesta poate fi utilizat direct ca mediu dielectric într-un condensator.
Orez. 2. Senzor de deplasare liniar capacitiv cu un dielectric mobil.
1.2 Senzori optici de mișcare
Există multe variații ale circuitelor senzorilor de mișcare bazate pe diferite efecte optice. Poate cea mai populară este schema de triangulare optică - senzorul de poziție este, de fapt, un telemetru care determină distanța până la obiectul de interes, înregistrând radiația împrăștiată de suprafața obiectului și determinând unghiul de reflexie, ceea ce îl face posibil să se determine lungimea d - distanța până la obiect (Fig. 3) . Un avantaj important al majorității senzorilor optici este capacitatea de a face măsurători fără contact în plus, astfel de senzori sunt de obicei destul de precisi și au performanțe ridicate;
Orez. 3. Senzor optic de deplasare bazat pe circuit de triangulare optic.
O altă implementare a unui senzor optic, conceput pentru a înregistra și determina parametrii micilor mișcări și vibrații, folosește o structură dublă grătar, precum și o sursă de lumină și un fotodetector (Fig. 4). O grilă este staționară, a doua este mobilă și poate fi fixată mecanic de obiectul de interes sau poate transmite într-un fel mișcarea acestuia la senzor. O mică deplasare a rețelei în mișcare duce la o modificare a intensității luminii înregistrate de fotodetector, iar odată cu scăderea perioadei de rețea, precizia senzorului crește, dar intervalul său dinamic se îngustează.
Figura 4. Senzor de deplasare optică bazat pe rețele de difracție.
Senzorii optici care țin cont de polarizarea luminii au posibilități suplimentare de aplicare. Astfel de senzori pot implementa un algoritm pentru selectarea obiectelor pe baza proprietăților reflectorizante ale suprafeței, de exemplu. senzorul poate „acorda atenție” doar obiectelor cu reflectivitate bună, alte obiecte sunt ignorate. Desigur, sensibilitatea la polarizare afectează negativ costul unor astfel de dispozitive.
1.3 Senzori inductivi de deplasare
Într-o configurație a acestui tip de senzor, elementul de detectare este un transformator cu miez mobil. Deplasarea unui obiect extern face ca miezul să se miște, ceea ce provoacă o modificare a legăturii fluxului dintre înfășurările primare și secundare ale transformatorului (Fig. 5). Deoarece amplitudinea semnalului în înfășurarea secundară depinde de legătura fluxului, amplitudinea înfășurării secundare poate fi utilizată pentru a judeca poziția miezului și, prin urmare, poziția obiectului extern.
Orez. 5. Senzor inductiv de deplasare pe transformator.
O altă configurație are mai multe schema simpla, cu toate acestea, este potrivit doar pentru un număr mic de aplicații în care este necesar să se detecteze mișcări sau vibrații mici ale obiectelor constând din material feromagnetic. În acest circuit, obiectul feromagnetic de interes joacă rolul unui circuit magnetic, a cărui poziție afectează inductanța bobinei de măsurare (Fig. 6).
Orez. 6. Senzor inductiv de deplasare pentru obiecte din materiale feromagnetice.
1.4 Senzori de deplasare cu curent Eddy
Senzorii de acest tip conțin un generator câmp magneticși un înregistrator, cu ajutorul căruia se determină mărimea inducției câmpurilor magnetice secundare. În apropierea obiectului de interes, generatorul creează un câmp magnetic, care, pătrunzând în materialul obiectului, generează în volumul acestuia curenți turbionari (curenți Foucault), care, la rândul lor, creează un câmp magnetic secundar (Fig. 7). Parametrii câmpului secundar sunt determinați de înregistrator, iar pe baza lor se calculează distanța până la obiect, deoarece cu cât obiectul este mai aproape, cu atât fluxul magnetic va pătrunde în volum mai mare, ceea ce va spori curenții turbionari și inducția. a câmpului magnetic secundar. Un principiu similar este utilizat în detectoarele de defecte curenți turbionari, cu toate acestea, acolo parametrii câmpului magnetic secundar sunt influențați nu de distanța până la obiect, ci de prezența imperfecțiunilor ascunse în structura sa internă. Metoda este fără contact, dar poate fi folosită numai pentru corpuri metalice.
Orez. 7. Senzor de deplasare cu curent Eddy.
1.5 Senzori de deplasare cu ultrasunete
înfășurarea senzorului electromagnetic al transformatorului
Senzorii cu ultrasunete implementează principiul radar - undele ultrasonice reflectate de un obiect sunt înregistrate, prin urmare diagrama structurală este de obicei reprezentată de o sursă de unde ultrasonice și un înregistrator (Fig. 8), care sunt de obicei închise într-o carcasă compactă. Determinarea intervalului de timp dintre momentele de trimitere și primire a unui impuls ultrasonic vă permite să măsurați distanța până la un obiect cu o precizie de zecimi de milimetru. Alături de senzorii optici, senzorii cu ultrasunete sunt poate cel mai versatil și cel mai avansat instrument de măsurare fără contact în prezent. Utilizarea acestui principiu de măsurare poate fi găsită din nou în detectoarele de detectare a defectelor, doar de această dată în detectoarele de defecte cu ultrasunete.
Orez. 8. Senzor de deplasare cu ultrasunete.
1.6 Senzori de deplasare magnetorezistivi
Senzorii de deplasare magnetorezistiv utilizează dependența rezistenței electrice a plăcilor magnetorezistive de direcția și magnitudinea inducției unui câmp magnetic extern. Senzorul, de regulă, constă dintr-un magnet permanent și un circuit electric care conține plăci magnetorezistive conectate printr-un circuit de punte și o sursă. tensiune DC(Fig. 9). Un obiect de interes, constând dintr-un material feromagnetic, care se mișcă într-un câmp magnetic, își schimbă configurația, în urma căruia rezistența plăcilor se modifică, iar circuitul punții înregistrează o nepotrivire, a cărei mărime poate fi folosită pentru a judeca pozitia obiectului.
Orez. 9. Senzori de deplasare magnetorezistivi.
1.7 Senzori cu efect Hall
Senzorii de acest tip au un design similar cu cel al senzorilor magnetorezistivi, dar funcționarea lor se bazează pe efectul Hall - trecerea curentului printr-un conductor care este expus unui câmp magnetic extern duce la apariția unei diferențe de potențial în secţiune transversală conductor.
1.8 Senzori de deplasare magnetostrictivi
De regulă, un senzor magnetostrictiv este un canal extins - un ghid de undă, de-a lungul căruia un magnet inel permanent se poate mișca liber. În interiorul ghidului de undă există un conductor capabil să creeze un câmp magnetic pe toată lungimea sa atunci când i se aplică impulsuri electrice (Fig. 10). Câmpul magnetic rezultat este adăugat câmpului unui magnet permanent, iar câmpul rezultat creează un cuplu de rotație al canalului care conține ghidul de undă (efectul Weidemann). Impulsurile de rotație se propagă de-a lungul canalului în ambele direcții la viteza sunetului materialului canalului. Înregistrarea intervalului de timp dintre trimiterea unui impuls electric și primirea unui impuls de rotație face posibilă determinarea distanței până la magnetul permanent, adică determina pozitia acestuia. Canalul poate avea destul lungime mai mare(până la câțiva metri), iar poziția magnetului poate fi determinată cu o precizie de câțiva micrometri. Senzorii magnetostrictivi au o repetabilitate excelentă, rezoluție, robustețe la medii dure și sensibilitate scăzută la schimbările de temperatură.
Orez. 10. Senzor de deplasare magnetostrictiv.
1.9 Senzori potențiometrici de deplasare
Un senzor de acest tip se bazează pe un circuit electric care conține un potențiometru (Fig. 11). Mișcarea liniară a unui obiect duce la o modificare a rezistenței potențiometrului ( rezistor variabil). Dacă trece un curent continuu prin potențiometru, atunci căderea de tensiune pe acesta va fi proporțională cu mărimea rezistenței și, în consecință, cu mărimea mișcării liniare a obiectului de interes.
Orez. 11. Senzor potențiometric de deplasare.
Alături de senzorii mecanici de deplasare, senzorii potențiometrici sunt cei mai folosiți datorită simplității și costului redus, dar pentru măsurători universale, de precizie și fără contact, senzorii bazați pe efecte optice au fost utilizați în ultima perioadă din ce în ce mai mult.
Atunci când se operează sisteme de automatizare și echipamente de măsurare a informațiilor, este necesar să se măsoare și să analizeze diverse mărimi fizice. Adesea, este necesar să le aduceți într-o formă și formă care este convenabilă pentru prelucrare ulterioară, dar care nu este susceptibilă de percepție directă. Senzorii sunt utilizați în aceste scopuri.
Prin senzor se înțelege un element care convertește o valoare controlată de un tip într-o valoare de alt tip, mai convenabilă pentru influențarea elementului operațional al sistemului de control automat. Într-un senzor electric, o modificare a unui parametru controlat (adesea non-electric) la intrare determină o anumită modificare a parametrului electric de ieșire, ceea ce duce la o modificare (comutare) a curentului sau a EMF în circuit electric la ieșirea senzorului. Prin urmare, senzorii sunt de obicei clasificați ca dispozitive electrice.
În funcție de tipul mărimii controlate, se disting senzorii: deplasare mecanică liniară sau unghiulară, viteză, accelerație, cuplu, temperatură, presiune etc.
Senzorii sunt împărțiți în două grupuri mari:
Pasiv sau parametric.
Activ sau generator.
Primul grup include senzori care nu sunt capabili să creeze în mod independent un semnal electric la ieșire. Senzorul, sub influența valorii controlate, își modifică doar parametrii interni, ceea ce provoacă în cele din urmă o modificare a semnalului de ieșire. Senzorii activi nu necesită o sursă de alimentare externă sub influența valorii măsurate, ei înșiși generează un semnal electric, de obicei sub formă de fem.
Revizuirea modelelor existente
Printre varietatea largă de modificări de proiectare ale senzorilor de deplasare liniară (LMS) cu parametri operaționali și metrologici îmbunătățiți și funcționalitate largă, se remarcă LMS bazat pe sisteme magnetice distribuite. Cei mai răspândiți dintre această clasă de DLP sunt senzorii diferențiali tip transformator, ale căror proprietăți sunt de obicei evaluate folosind mai multe caracteristici.
1. Gradul de corespondență dintre funcțiile de conversie reală și calculată, care poate fi caracterizat prin raportul dintre neliniaritate și câștigul Ki. Pentru senzori liniari precizie ridicată, neliniaritatea caracteristicii de ieșire nu trebuie să depășească 0,1-0,2%.
2. Schimbarea de fază a tensiunii de ieșire în raport cu tensiunea de excitare;
3. Sensibilitatea DLP. La o tensiune de excitație fixă, este definită ca tangenta pantei caracteristicii de ieșire.
Pe lângă cele de mai sus parametri importantiÎn funcție de domeniul de aplicare a DLP, sunt incluse și valoarea forțelor reactive asupra piesei mobile, dimensiunile generale și greutatea, repetabilitatea caracteristicilor, fiabilitatea, intensitatea energiei etc.
Dependența parametrului de ieșire Y al senzorului de valoarea de intrare X este principala caracteristică a senzorului. În funcție de tipul de senzor, acesta poate fi liniar sau neliniar.
Raportul dintre creșterea valorii de ieșire și creșterea valorii de intrare se numește sensibilitatea senzorului:
Durata procesului tranzitoriu determină viteza senzorului. De obicei, senzorii trebuie să aibă sensibilitate și viteză maxime. În plus, una dintre cerințele principale este ca parametrii și caracteristicile senzorului să rămână stabili în timp și atunci când condițiile de funcționare se schimbă (temperatură, presiune, umiditate, poziția senzorului etc.).
În zilele noastre, transformatorul diferenţial cu jug de aer (ADT) este utilizat pe scară largă. În circuitul magnetic al acestui transformator, doar miezul este din material feromagnetic, jugul este absent sau este aer.
Transformatoarele diferențiale sunt utilizate pe scară largă în fabricarea instrumentelor, deoarece fără un jug conducător magnetic, liniaritatea caracteristicii de ieșire s-a îmbunătățit semnificativ, iar „efectul solenoid” a scăzut brusc.
Cele mai bune caracteristici au un transformator diferențial cu trei bobine, prezentat în figura 1. Senzorul este format dintr-un circuit magnetic extern 1, un miez mobil 2 și o bobină pe care sunt înfășurate de excitație 3 și secțiuni ale înfășurării de operare (RO) 4. situat, conectat în serie, în contracurent.
Când înfășurarea de excitație a senzorului este alimentată de la o sursă AC iar poziția medie a miezului, EMF indus în secțiunile înfășurării de lucru situate pe ambele părți ale miezului sunt egale ca mărime și opuse ca fază. Prin urmare, EMF rezultat și tensiunea de ieșire sunt minime. Dacă miezul este deplasat din poziția de mijloc, echilibrul este perturbat și tensiunea de ieșire crește.
Panta și liniaritatea tensiunii de ieșire sunt determinate de uniformitatea cuplării electromagnetice dintre înfășurări, care este asigurată de distribuția uniformă a secțiunilor înfășurării de lucru deasupra înfășurării de excitație și de raportul spirelor acestor înfășurări deasupra miezului. .
Din analiza modelelor de senzori existente rezultă că proiectarea unui senzor de tip LDT (transformator diferențial liniar) (Fig. 12) poate fi luată ca bază pentru proiectare, deoarece alte modele nu oferă cele necesare. dimensiunile de gabarit. În plus, senzori tip similar Se disting prin simplitatea comparativă a designului, fiabilitatea ridicată și stabilitatea parametrilor.
Senzorul este un transformator diferențial liniar (LDT) cu un jug de aer. Senzorul este format dintr-o carcasă 1, un circuit magnetic 2, o bobină 3, o cupă 4. Schema electrica senzorul este prezentat în fig. 13.
Orez. 12. Transformator diferenţial cu trei bobine.
Orez. 13. Circuitul electric al senzorului LDT.
Corpul este un cilindru gol cu o grosime de perete de 1 mm. Pentru a asigura cerințele datelor inițiale și rezistența la influențe externe, este realizat dintr-o țeavă nemagnetică (oțel 12X18PI10T).
Pentru a reduce puterea consumată de senzor și a reduce influența câmpurilor magnetice externe asupra parametrilor acestuia, în interiorul carcasei este plasat un circuit magnetic extern, care este un tub din material feromagnetic 79NM cu o grosime de 0,35 mm. Aliajul 79NM este inferior altor materiale magnetice moi în ceea ce privește permeabilitatea magnetică, dar are o specificitate ridicată. rezistenta electricași o mică dependență a lui m de frecvență. În plus, are magnetostricție scăzută și coercivitate scăzută. Vâscozitatea și plasticitatea materialului asigură utilizarea unor metode avansate de realizare a circuitului magnetic (desenare, ștanțare, îndoire etc.).
Bobina este formată dintr-un cadru din plastic fenolic, pe care sunt amplasate înfășurarea primară OB (înfășurarea de excitație) și două secțiuni ale înfășurării secundare P 01 și P 02 (secțiuni ale înfășurării de lucru). Înfășurările de lucru sunt conectate în serie în direcții opuse. Cablurile de înfășurare sunt lipite de petalele tamponului și apoi fir de instalare scos afară. Sticla este un cilindru gol din oțel nemagnetic, în interiorul căruia se află partea mobilă cu un spațiu garantat.
Partea mobilă a senzorului este un miez format din plăci magnetice moi. Senzorul în cauză folosește aspect nou de bază, ca fiind avansat din punct de vedere tehnic și îmbunătățind liniaritatea caracteristicii de ieșire. Miezul este un tub tubular cu o tijă de oţel inoxidabil(tijă), umplut cu plăci subțiri de material magnetic moale, umplut cu un compus pentru imobilitate.
Senzorul este de tip transformator diferențial, al cărui principiu de funcționare se bazează pe modificarea inductanței reciproce între secțiunile înfășurării de lucru și înfășurarea de excitație atunci când miezul se mișcă. Când înfășurarea de excitație a senzorului este alimentată de la o sursă de curent alternativ, iar miezul se află în poziția de mijloc (poziție zero), EMF indus în secțiunile înfășurării de lucru este egală ca mărime și opusă ca fază, deci EMF rezultată iar tensiunea de ieșire este minimă. Dacă miezul este deplasat din poziția de mijloc, echilibrul este perturbat și tensiunea de ieșire crește.
Tensiunea de ieșire se modifică proporțional cu cantitatea de mișcare a miezului. Când miezul trece prin poziția zero, faza tensiunii de ieșire se modifică cu 180°.
Utilizarea separată a actuatorului și a senzorului necesită o legătură intermediară între aceste dispozitive, în plus, numărul de fire furnizate crește. Acest lucru duce la o creștere a masei pieselor mobile, a dimensiunilor, la scăderea fiabilității și la creșterea costurilor. Prin urmare, actuatorul și senzorul sunt combinate într-un singur dispozitiv, numit traductor electromagnetic liniar cu un senzor de poziție încorporat (LEP) (Fig. 14).
Orez. 14. Vedere generală a liniilor electrice.
Orez. 15. Diagrama de proiectare a senzorului.
Orez. 16. Schema de proiectare a actuatorului.
Linia de alimentare este formată din două elementele principale: senzorul 1 și actuatorul 4, combinate într-un singur dispozitiv. Senzorul este un cilindru în care sunt amplasate o piesă mobilă 3 și o bobină 2. Dispozitivul de acționare este format dintr-o carcasă, în interiorul căreia se află o armătură mobilă 5. Partea mobilă a senzorului și armătura sunt conectate rigid și se poate mișca. Ancora este conectată la corpul de lucru al unității, a cărui mișcare este măsurată.
Când un semnal de control este aplicat actuatorului, armătura începe să se miște la stânga sau la dreapta. Din bobina senzorului este eliminată o tensiune alternativă, a cărei amplitudine este proporțională cu cantitatea de mișcare a părții mobile.
Schema de proiectare a senzorului este prezentată în Fig. 15.
Sistemul magnetoelectric a fost adoptat ca bază pentru proiectarea actuatorului, deoarece satisface cel mai pe deplin cerințele specificațiilor tehnice. Schema de proiectare a actuatorului (denumită în continuare convertor) este prezentată în Fig. 16.
Convertorul este format dintr-o carcasă de oțel 1, pe suprafața interioară a cărei magneți permanenți 4 sunt lipiți. înfăşurare situată pe ea DC 5. Armătura se poate deplasa liber în carcasă pe bucșe din bronz 8, 9. Legătura electrică între circuitul exterior și bobină se realizează cu ajutorul conductorilor flexibili.
Pentru a crește forța dezvoltată de armătură, precum și pentru a reduce puterea consumată de convertor, între magneți și armătură este instalat un circuit magnetic suplimentar 6, care este un cilindru gol din aliaj feromagnetic 50НХС.
Pentru a conecta înfășurările senzorului și convertorului la circuitul extern, pe carcasă este instalat mufa 2.
Principiul de funcționare al convertorului se bazează pe interacțiunea a două fluxuri: cel polarizant, creat de magneți permanenți, și cel de lucru, creat de înfășurarea armăturii. Ca rezultat al acestei interacțiuni, armătura dezvoltă o forță, a cărei mărime este proporțională cu mărimea curentului care curge prin înfășurare.
1.10 Tip senzor inductiv de deplasareLVDTserieS.M.
Transformatoarele diferențiale variabile liniare (LVDT) (Figura 17) sunt ideale pentru aplicații în medii industriale dure, cum ar fi temperaturi ridicate, presiune, dinamică constantă sau cicluri lungi de producție.
Orez. 17. Senzor de deplasare inductiv de tip LVDT seria SM.
Specificații :
Deplasare nominală (Lnom) 0-2…200, mm
Neliniaritate, %: 0,2 sau 0,3
Interval de temperatură nominală, _ C: -40...+120 (+150)
Material: otel placat cu nichel
Clasa de protectie: IP67 (IP68)
Frecvența de alimentare, kHz: 2…10
Tensiune nominală (Unom), V: 3
Dimensiuni totale, mm, nu mai mult: diametru 12 x (220 - 1593)
După o analiză a structurilor existente, proiectarea unui senzor de tip LDT (transformator diferențial liniar) a fost luată ca bază pentru proiectare și au fost efectuate calcule suplimentare folosind acest senzor.
2. Partea de calcul
2.1 Datele inițiale pentrucalcul
1. Tensiune de alimentare U 1 =7 V;
2. Frecvența tensiunii de alimentare f= 2000 Hz;
3. Consum de curent I 1 = 0,02A;
4. Mărimea tensiunii de ieșire în poziția zero U max = 0,7 V;
5. Panta caracteristicii de iesire K=0,05mm -1;
6. Cursa de lucru a piesei mobile l p =10?10 -3 m;
7. Lungimea miezului lc =20-10-3;
8. Permeabilitatea magnetică efectivă a miezului (pentru aliaj 50 HXC)
10. Secţiunea transversală a miezului S c = S B = 7-10 -6 m2;
11. Diametrul cadrului de-a lungul marginilor înfăşurării primare D k 1 =10?10 -3 m;
12. Diametrul cadrului sub înfăşurarea secundară D k 2 = 10 -3 m;
13. Diametru cadru D car =8?10 -3 m.
2.2 Calcul electromagneticT
Reactanța inductivă a înfășurării primare:
Inductanța înfășurării primare:
Numărul de spire ale înfășurării primare sub miez:
Pentru a asigura o liniaritate ridicată a caracteristicii, este necesar ca inductanța înfășurării primare să fie o valoare constantă atunci când miezul se mișcă pe întreaga cursă de lucru. Prin urmare, înfășurarea trebuie înfășurată strâns pentru a se întoarce pe toată lungimea cadrului. Lungimea cadrului:
La înfășurarea la obrajii cadrului, se obține o înfășurare neliniară pe o lungime de aproximativ 1,5 mm la fiecare obraz. În acest sens, lungimea cadrului trebuie mărită cu 3 mm. Acceptăm l k =43 mm. Numărul total de spire ale înfășurării primare:
Pentru înfășurare, este selectat un fir de calitate PET - 155 cu un diametru al firului d = 0,125 mm și un diametru de izolație d = 0,155 mm.
Numărul de ture într-un strat:
Numărul de straturi de înfășurare primară:
Numărul de straturi trebuie să fie întreg și, din motive de proiectare, egal, astfel încât începutul și sfârșitul înfășurării să fie la același obraz al cadrului. Luăm n 1 =6 straturi.
Numărul specificat de spire ale înfășurării primare:
Numărul specificat de spire ale înfășurării primare sub miez:
Valoarea specificată a inductanței:
Inductanța primară totală:
Rezistența activă a înfășurării primare:
Impedanta circuitului primar:
Consumul de curent al senzorului:
Densitatea de curent a înfășurării primare:
Numărul de spire ale secțiunii de înfășurare secundară la deplasarea miezului pe toată cursa:
Numărul de ture într-un strat:
Numărul de straturi ale secțiunii de înfășurare secundară:
Numărul de spire ale înfășurării trebuie să fie întreg și par. Acceptăm n 2 =8.
Numărul de spire ale secțiunii de înfășurare secundară:
Rezistența activă a secțiunii de înfășurare secundară:
Inductanța secțiunii înfășurării secundare:
Inductanța totală a înfășurării secundare:
Diametrul exterior al bobinei senzorului:
Tensiuni la bornele înfășurării de lucru în poziția zero a părții mobile:
2.3 Calcul termic
Când curentul trece prin părțile sub tensiune ale unui aparat electric, apar pierderi energie electrica sub formă de căldură. ÎN caz general energie termică este cheltuită pentru creșterea temperaturii aparatului și este parțial disipată în mediu.
Pe măsură ce temperatura crește, apare îmbătrânire accelerată izolarea conductoarelor şi reducerea rezistenţei lor mecanice. De exemplu, durata de viață a izolației cu o creștere a temperaturii pe termen lung cu doar 8 ° C peste valoarea nominală este redusă la jumătate. Prin urmare, în toate modurile de funcționare posibile, temperatura lor nu trebuie să depășească astfel de valori care să asigure durata specificată de funcționare a dispozitivului.
Să calculăm creșterea temperaturii bobinei senzorului.
Conform legii Newton-Richmann, creșterea temperaturii bobinei este definită astfel:
Bobina acestui senzor folosește izolație clasa A, temperatura admisaîncălzire u=105 _ C;
Apoi rezistivitate fir de cupru la o temperatură de 105_C:
Rezistență activă la o temperatură de 105_C înfășurări:
Excitare:
Muncitori:
Impedanța circuitului înfășurărilor primare și secundare:
Puterea eliberată pe înfășurările primare și secundare:
Putere totala:
Suprafata de racire a bateriei:
Incalzire bobina:
Temperatura de suprafață la starea de echilibru:
Aceste. temperatura nu depășește temperatura admisă pentru această clasă de izolație.
Concluzie : Pe baza datelor obtinute din calcule electromagnetice si termice, putem spune ca parametrii obtinuti sunt acceptabili pentru acest tip de senzor, deoarece satisface cerințele specificate, prin urmare, puteți trece la următoarea etapă de proiectare a cursului.
3. Definirea parametrilor și construcția caracteristicilor
Fig. 18. Banc de laborator pentru caracterizare
3.1 Determinarea caracteristicilor de neliniaritate ale tensiunii de ieșire a unui senzor de deplasare liniară LDT
Rezistenta la sarcina senzorului 10 kOhm:
Domeniul de funcționare al senzorului: ±30 mm;
"+" - mișcarea tijei către senzor;
"-" - mișcarea tijei în interiorul senzorului.
Dependența tensiunii de ieșire a senzorului LDT - 3522 de mișcarea în puncte este determinată:
30;-25;-20;-15;-10;-5;0;5;10;15;20;25;30 mm.
Rezultatele măsurătorilor sunt introduse în tabelul 1.
Tabelul 1. Date experimentale.
Neliniaritatea caracteristicilor (Fig. 19) se calculează prin formula:
unde Ui este tensiunea măsurată în punctele indicate în tabel, V;
li - punctele indicate în tabel, mm;
K este panta caracteristicii tensiunii de ieșire la sfârșitul domeniului de funcționare; lk = 30 mm - domeniu de lucru.
Exemplu de calcul pentru un punct:
Coeficient LA se calculează separat în direcții pozitive și negative folosind formula:
Unde U afară - tensiune la sfârșitul intervalului de funcționare.
Orez. 19. Neliniaritatea caracteristicii la deplasarea senzorului
3.2 Caracteristica de ieșire a senzorului
Caracteristica de ieșire a senzorului este dependența tensiunii de ieșire de poziția piesei mobile și este descrisă prin expresia: Uout=f(l i) este reprezentată grafic conform datelor obținute din experiență (Fig. 20).
Orez. 20. Caracteristica de ieșire a senzorului.
3.3 Graficul coeficientului de pantă de ieșire
Orez. 21. Dependența grafică a coeficientului de pantă a caracteristicii de ieșire de mișcarea senzorului.
3.4 Construcția caracteristicii de sarcină
Caracteristica de sarcină este necesară pentru a determina limitele în care sarcina poate fi modificată, astfel încât tensiunea de ieșire a senzorului să se modifice nesemnificativ.
Caracteristica de sarcină este descrisă prin expresia: Uout=f(R n) (Fig. 22).
Tabelul 2
|
Tensiune U BbIX, V |
Orez. 22. Caracteristica de sarcină.
Concluzie: Ca urmare a studierii parametrilor și caracteristicilor senzorului de deplasare liniară, au fost construite 4 caracteristici diferite. Graficele acestor caracteristici arată că neliniaritatea caracteristicii scade pe măsură ce tija senzorului se apropie de poziția zero. Caracteristica de ieșire nu este liniară și minimul său este deplasat din poziția zero a tijei. Astfel de rezultate pot fi explicate printr-o anumită neuniformitate a cuplării electromagnetice dintre înfășurări, a cărei cauză poate fi distribuția neuniformă a secțiunilor înfășurării de lucru deasupra înfășurării de câmp și raportul spirelor acestor înfășurări sub miez.
Caracteristica de sarcină arată că atunci când sarcina se modifică de la 2 la 10 kOhm, Uout se modifică ușor, iar această schimbare este neliniară, ceea ce se explică prin saturația miezului atunci când curg curenți mari la o sarcină mai mică.
Concluzie
În acest proiect de curs, a fost proiectat un dispozitiv fără contact folosind exemplul unui senzor de deplasare liniară. Proiectul de curs vă permite să înțelegeți și să asimilați mai bine caracteristicile senzori electromagnetici, dobândesc abilități în calculul și proiectarea senzorilor cu transformator liniar, studiind modurile de funcționare ale acestora. Pe parcursul proiectului de curs s-au efectuat calcule electromagnetice și termice și au fost selectați parametrii. A fost determinată neliniaritatea caracteristicii și a fost calculat coeficientul de pantă al caracteristicii de ieșire și au fost construite caracteristicile de ieșire și sarcină.
Analogul proiectat al senzorului de deplasare liniară satisface toate cerințele stabilite în sarcină.
Referințe
1. Bogdanov E.P. Atelier de laborator la disciplina „Aparate electrice fără contact” pentru studenții specialității 18020 - „Aparate electrice și electronice” - Tomsk: Editura TPU, 2003.-58p.
2. Bogdanov E.P. Orientări pentru finalizarea unui proiect de curs la disciplina pe tema: „Dispozitive electrice fără contact” pentru studenții specialității 18020 - „Dispozitive electrice și electronice” - Tomsk: Editura TPU, 2003. - 20 p.
3. Bul B.K. Fundamentele teoriei dispozitivelor electrice. - M.: facultate, 1970.
4. Kulikovsky L.F., Zaripov M.F. Traductoare inductive de deplasare cu parametri repartizați. - M.: Energie, 1966.
5. Matalin A.A. Tehnologia ingineriei mecanice. - L.: Inginerie mecanică, 1985.
6. Savcenko M.G., Filippov V.I., Maryanov G.M. Proiectarea dispozitivelor de alimentare și de acționare electrică. - M.: Energie, 1973.
7. Chunikhin A.A. Aparatură electrică. - M.: Energoatomizdat, 1988.
8. Sisteme și dispozitive electronice și electromecanice: Sat. ştiinţific Proceedings, NPC „Polyus”, Tomsk, 1997.
Postat pe Allbest.ru
Documente similare
Proiectarea și principiul de funcționare a senzorilor de deplasare de diferite tipuri: capacitivi, optici, inductivi, curenți turbionari, ultrasonici, magnetorezistivi, magnetostrictivi, potențiometrici, pe baza efectului Hall. Domenii de utilizare a dispozitivelor.
rezumat, adăugat 06.06.2015
Dezvoltarea și selectarea unei scheme funcționale a unui senzor debitmetru electromagnetic. Formarea și cercetarea analogului, circuit digital. Calculul sursei de alimentare a dispozitivului. Procedura de dezvoltare a unui algoritm de operare și software microcontroler.
lucrare curs, adaugat 19.08.2012
Proiectul unui canal de măsurare cu traductor de deplasare - un cod pentru un senzor fotoelectric rotativ care asigură controlul parametrilor de mișcare ai corpului de lucru în funcție de coordonatele poziției și vitezei. Calculul grilei de biți convertorului.
lucru de laborator, adaugat 04.04.2012
Dezvoltarea unui sistem conceput pentru a controla rotația unui dispozitiv de mișcare robot. Selectarea și calculul funcției de transfer a unui microprocesor, amplificator, supapă solenoidală, cilindru hidraulic. Calculul senzorului feedbackși stabilitatea sistemului.
lucrare curs, adaugat 20.10.2013
Concept și caracteristici funcționale senzori potențiometrici, varietățile și caracteristicile lor distinctive, scopul și principiul de funcționare. Caracteristicile statice și dinamice ale senzorului potențiometric liniar, inversor și funcțional.
prezentare, adaugat 24.12.2011
Descrierea caracteristicilor tehnice și a principiului de funcționare a senzorului de accelerație liniară. Justificarea schiței tehnice. Calculul parametrilor statici și dinamici ai dispozitivului, senzori de deplasare. Analiza surselor de erori şi moduri posibile reducerea acestora.
test, adaugat 21.05.2013
Clasificarea fenomenelor și efectelor fizice utilizate în proiectarea dispozitivelor pentru obținerea informațiilor primare de măsurare. Tipuri de elemente elastice. Calculul elementului sensibil al senzorului de presiune și al traductorului primar de măsurare.
lucrare curs, adaugat 16.04.2012
Scopul și principiul de funcționare al potențiometrelor. Dependența tensiunii de ieșire de mișcarea glisorului. Circuitul electric al unui senzor potențiometric. Caracteristicile statice ale potențiometrelor încărcate. Tipuri reversibile și nereversibile ale includerii lor.
prezentare, adaugat 05.10.2016
De bază specificatii tehnice sisteme de reglementare. Selectarea unui microprocesor, roboți de prindere, acționare hidraulică, cutie de viteze, motor, senzor de presiune și deplasare liniară, amplificator operațional. Determinarea stabilității unui sistem discret.
lucrare curs, adaugat 20.10.2013
Secvență și metodologie pentru dezvoltarea senzorilor de distanță și atingere. Principiul de funcționare al senzorilor verificați și al instrumentelor standard (micrometru sau cadran indicator ICH-25). Raportul dintre citirile senzorului care se verifică. Prelucrarea rezultatelor măsurătorilor.
Senzorii de mișcare liniară au mai multe niveluri de clasificare, dar principalul este principiul de funcționare, care determină scopul funcțional și domeniul de utilizare al dispozitivelor.
Conform principiului de funcționare, dispozitivele de control și măsurare a deplasării pot fi împărțite în:
- Capacitiv.
- optice (optoelectronice).
- Inducţie.
- Senzori de tip magnetostrictiv.
- cu ultrasunete.
- Rezistiv, magnetorezistiv și potențiometric.
- Dispozitivele care folosesc efectul Hall în munca lor practic nu sunt folosite în viața de zi cu zi.
În gospodărie sisteme de securitateși dispozitive de control al accesului și al mișcării, se folosesc în mod predominant primele patru grupuri de senzori.
Domeniul de aplicare al senzorilor
Orice senzor de mișcare, indiferent de principiul de funcționare, este conceput pentru a converti mișcarea liniară în digital sau semnal analogic, care apoi merge la unitatea electronică de măsurare sau de declanșare. Precizia măsurării depinde de principiul de funcționare.
Adesea nu este nevoie să măsurați o anumită cantitate de mișcare. De exemplu, în sistemele de securitate este destul de simplu să se determine prezența mișcării în zona de control. Aceste dispozitive se numesc senzori de mișcare. Nu li se cere să aibă o precizie ridicată în valorile de măsurare. Prin urmare, dispozitivele ieftine capacitive, optice sau inductive sunt cele mai comune aici.
În sistemele de control automat de producție industrială, sunt necesare măsurători de deplasare.

Mai mult, măsurarea (de exemplu, la mașinile cu control numeric) trebuie efectuată cu mare precizie și se efectuează fie continuu, fie discret - la anumite intervale. În acest caz, dispozitivele magnetostrictive sunt cele mai utilizate.
Senzori capacitivi Cel mai simplu senzor capacitiv din designul său seamănă cu un condensator.
- Când obiectul controlat se mișcă, capacitatea acestuia se poate modifica prin:
- Modificări ale spațiului dintre plăci.
- Modificări ale poziției relative a plăcilor și, în consecință, o creștere (scădere) a zonei de suprapunere reciprocă. Schimbări constantă dielectrică
strat izolator. Când capacitatea dispozitivului se modifică, această valoare poate servi în sine ca semnal transmis către unități electronice

control și poate include un generator de impulsuri, care poate fi mai ușor de prelucrat.
- Cele mai răspândite dispozitive capacitive de control al mișcării sunt:
- Ca sursă de semnal în sistemele de monitorizare a umplerii rezervoarelor cu produse lichide sau pulverulente.
- Ca un dispozitiv care controlează începutul și sfârșitul cursei de lucru a corpului executiv al sistemelor robotizate și mașinilor și liniilor automate.
- Pentru pozitionarea diferitelor obiecte.
- Ca un comutator de proximitate obișnuit. În sistemele de control şi alarma antiefractie
ca „senzor de prezenţă”.
Datorită costului redus și fiabilității lor, dispozitivele capacitive sunt utilizate pe scară largă în sistemele individuale ale complexului de suport pentru viața casei inteligente.
- Avantajele lor, în comparație cu dispozitivele care folosesc un alt principiu de funcționare, includ:
- Tehnologie simplificată de producție în masă, folosind materiale ieftine, disponibile pe scară largă.
- Sensibilitate ridicată cu consum redus de energie.
- Dimensiune compactă și greutate redusă.
- Durabilitate, simplitate și fiabilitate a funcționării.
Principalii factori care limitează utilizarea pe scară largă în sistemele de control de înaltă precizie sunt:
- Factor de conversie relativ scăzut.
- Nevoia de ecranare atentă a elementelor senzorilor.
- Îmbunătățirea preciziei dispozitivului la frecvențe mai mari în comparație cu frecvența industrială de 50,0 herți.
- Probabilitate mare de alarme false la schimbarea condițiilor atmosferice (zăpadă, ploaie), ceea ce necesită o protecție sporită a sursei de semnal.
Senzori de inducție
Conectați-vă senzori de inducție se formează prin modificarea inductanței bobinei. Dispozitivele de acest tip se caracterizează prin precizie ridicată, cu dimensiuni reduse. Dispozitivele de monitorizare prin inducție sunt capabile să efectueze măsurători de la distanță, iar după tip sunt împărțite în simple și diferențiale.
Unul dintre modelele acestor dispozitive este un transformator, al cărui miez are capacitatea de a se mișca.
Când miezul se mișcă, inductanța bobinei se modifică și această schimbare este un semnal. Valoarea inductanței se modifică proporțional cu nivelul mișcării miezului. Dacă controlul mișcării este efectuat în legătură cu obiecte ferimagnetice, atunci nu este necesar un miez.
Piesa, căzând în câmpul de radiație electromagnetică al bobinei, își schimbă inductanța și generează un semnal de control. Senzorii de control de tip inducție sunt utilizați pe scară largă în mașinile controlate de computer, sistemele de securitate fără contact și pentru măsurarea efectivă a mișcării, cu un raport al valorii acesteia conform cantar digital
sau cu informații afișate pe un ecran cu cristale lichide.
Dispozitive optice și optoelectronice de control al mișcării
Triangulatoarele optice, care sunt în esență un telemetru optic convențional (laser), sunt cele mai utilizate pe scară largă pentru monitorizarea mișcării și măsurarea distanțelor. Pentru a monitoriza modificările mici ale cantităților liniare, se folosesc dispozitive cu un grătar polarizant. În plus, senzorii optici sunt utilizați pe scară largă în sistemele de securitate ca „barieră de fascicul”.
- Avantajele acestei categorii de dispozitive includ:
- Implementarea controlului fără contact.
- Precizie ridicată.
Generarea aproape instantanee a unui semnal de control (fără timp de întârziere a răspunsului).
- Dezavantajele senzorilor optici de înaltă precizie sunt:
- Cost semnificativ. Criticitate față de condiții.
mediu
Cel mai mare producător rus de dispozitive pentru monitorizarea mișcărilor este compania „ELTECH” (Sankt Petersburg), specializată în dispozitive pentru monitorizarea și măsurarea mărimii mișcării liniare de tipuri inductiv, rezistiv și capacitiv.
Potențiometrele liniare ale modelelor Longfellow-2 și DuraStar oferă măsurarea deplasării într-un interval de până la 610,0 milimetri cu o precizie de 0,5%.

Costul dispozitivelor depinde de intervalul măsurat (modelul) și domeniul de livrare și se negociază la comanda.
Recent, instrumentele de fabricație chinezească ieftine, dar destul de precise, au devenit foarte populare.
- Cele mai comune modele sunt:„Seria DEPP EP15”
- — dispozitive de tip inducție utilizate în mașini-unelte și sisteme de control automate; Dispozitiv optic „Seria HENGXIA K100”
- vă permite să controlați dimensiuni în intervalul 50,0...7200,0 milimetri; Encoder liniar "Roundss Rlc50d"
În esență, este o bandă de măsurare electronică care vă permite să măsurați dimensiunile cu mare precizie și să controlați distanța parcursă.
Costul produselor chinezești depinde de cursul de schimb al rublei și este specificat în momentul comenzii.
Dispozitiv de control al mișcării DIY Este aproape imposibil să faci singur un dispozitiv pentru măsurarea cantității de mișcare.
Cu toate acestea, radioamatorii asamblează destul de des senzori de mișcare din echipamente radio și electronice sparte, care sunt utilizate cu succes în sistemele de securitate și de susținere a vieții.
De exemplu, un senzor poate fi folosit pentru a aprinde lumina într-o toaletă atunci când o persoană intră în baie. Nu mai puțin populare sunt dispozitivele similare pentru aprinderea și oprirea iluminatului în zonele rezidențiale. Și, desigur, aceste dispozitive sunt indispensabile atunci când vă creați propriul sistem de securitate, unde înregistrează orice încercare (fie că este vorba de o persoană sau de un animal) de intrare neautorizată pe teritoriul obiectului protejat ( teren de grădină , balcon, garaj). Să ne uităm la realizarea unui senzor de mișcare de casă folosind un exemplu de asamblare dispozitiv optoelectronic
, controlând traversarea perimetrului protejat.
- Piesele necesare pentru realizarea dispozitivului în sine sunt: Alimentare de la telefon mobil
- cu o tensiune de intrare de 5,0 volți.
- O fotocelulă este mai bună decât un fotorezistor.
- Tranzistor bipolar cu joncțiune „pnp”.
- Potențiometru de construcție (rezistență) cu un domeniu de reglare de 0...10,0 kilo-ohmi.
- Un indicator laser care produce un fascicul subțire, îngust direcționat este ideal ca sursă de radiație.
Ordinea de conectare a circuitului este următoarea:
- Catodul fotocelulei este lipit la conductorul pozitiv al sursei de alimentare - acest punct va fi conductorul comun (de masă).
- Un potențiometru colocvial este atașat de anodul fotocelulei atunci când motorul acesteia este mutat în poziția de mijloc.
- Contactul liber al potențiometrului este lipit de conductorul negativ al sursei de alimentare, iar contactul de la glisorul său la baza tranzistorului.
- Emițătorul tranzistorului este pornit și conectat la „plusul” comun al circuitului, iar colectorul este conectat la unul dintre contactele releului.
- Al doilea contact releu este lipit la firul negativ al sursei de alimentare.
La iluminarea ferestrei fotocelulei cu un indicator laser, rotirea glisierei potențiometrului asigură funcționarea fiabilă a releului. Puteți conecta orice sursă de semnal la contactele de comutare releului - urlator, lampă incandescentă, Indicator LED . Dezavantaj a acestui dispozitiv
este că se declanșează numai atunci când un fascicul de lumină se intersectează.
Adică, în modul de așteptare, toate elementele sale funcționează. Cu diferite metode de comutare a contactelor releului, este posibil să aprindeți lumina prima dată când fasciculul traversează și să o opriți a doua oară. Senzorii Hall integrati sunt utilizați în multe domenii ale industriei moderne, de exemplu în inginerie mecanică, electronică auto, tehnologia aviației
. Spre deosebire de senzorii mecanici și optici, senzorii Hall au un avantaj important - practic sunt insensibili la influențele mecanice și la modificările parametrilor de mediu, reducând în același timp costul soluției finite.
Introducere
Structura și principalele caracteristici ale senzorilor Hall liniari
Senzorii liniari Hall (HLS) sunt de obicei optimizați pentru măsurarea mărimii unui câmp magnetic unipolar sau bipolar. LDC-urile sunt caracterizate de doi parametri principali - sensibilitatea și liniaritatea într-un anumit interval de temperatură de funcționare.
O caracteristică tipică de transfer a LDC (dependența tensiunii de ieșire de amplitudinea câmpului magnetic) este prezentată în Fig. 1. Majoritatea senzorilor cu o singură sursă au o tensiune de ieșire zero (corespunzând cu intensitatea câmpului magnetic zero) egală cu jumătate din intervalul tensiunii de ieșire sau jumătate din tensiunea de alimentare. În acest din urmă caz, mărimea tensiunii zero și sensibilitatea depind de mărimea tensiunii de alimentare. Acest lucru se observă la senzorii cu ieșire proporțională, care sunt un element Hall cu un amplificator liniar (Fig. 2). Astfel, pentru popularul senzor A3515, cu o tensiune de alimentare de +5,0 V, tensiunea zero și sensibilitatea sunt de 2,5 V, respectiv 5,0 mV/Gauss, iar atunci când sursa de alimentare este crescută la 5,5 V, acești parametri se schimbă la valori. de 2,75 V și 5,5 mV/Gauss. De aceea, atunci când se utilizează acest tip de LDC, este necesar să se pună cerințe mai stricte asupra sursei de alimentare. În același timp, senzorii permit ajustări simple ale sensibilității fără componente suplimentare de amplificare, ceea ce poate fi foarte util.

LDC-urile moderne sunt un circuit integrat monolit, în care un element Hall, un amplificator liniar și o etapă finală de amplificare a puterii de clasă A sunt combinate pe un singur cip (Fig. 3). În plus, pentru a crește acuratețea conversiei și pentru a asigura stabilitatea temperaturii, cipul implementează un sistem automat de corecție a tensiunii de polarizare și filtrare a semnalului după amplificatorul liniar.


Tabelul 1 prezintă gama de noi senzori Hall liniari de la Allegro Microsystems. Senzorii A1301, A1302 au circuitul prezentat în Fig. 3. Ele oferă o precizie scăzută și pot fi utilizate, de exemplu, în sistemele de înregistrare a mișcărilor unghiulare sau liniare ale obiectelor. Precizia și stabilitatea caracteristicilor unui LDC cu un singur element Hall pot fi influențate de mulți factori: dezechilibrul gradienților de rezistență în funcție de direcția curentului, neomogenitatea geometrică, efectele piezoresistive și chiar influențele mecanice externe asupra corpului microcircuitului. Pentru a elimina influența acestor factori asupra acurateței LDC, se utilizează o schemă dinamică de compensare a compensației în cuadratura. Principiul funcționării acestuia este ilustrat în Fig. 4. Curenții elementului Hall din două direcții (0° și 90°) sunt comutați alternativ cu o frecvență de aproximativ 200 kHz la intrările amplificatorului diferențial, realizând o „rotire electronică” a elementului cu 90°. În același timp, în momentul „întoarcerii”, circuitul de reținere a probei fixează tensiunea la ieșirea amplificatorului, eliminând zgomotul de comutare. Semnalul este în cele din urmă trecut printr-un filtru trece-jos pentru restaurarea completă. Circuitul de compensare dinamică în cuadratura face posibilă eliminarea aproape completă a influenței factorilor externi de destabilizare, precum și obținerea unei stabilități ridicate a tensiunii de polarizare de ieșire. Dezavantajele circuitului includ prezența zgomotului în spectrul semnalului de ieșire în banda de frecvență de comutare F com, care limitează frecvența maximă a semnalului de ieșire al senzorului la o valoare de obicei egală cu 0,1–0,2 F com.

Principiul descris al compensării deplasării este utilizat la senzorii A1321–A1323 (Fig. 5). Aceste produse aparțin clasei LDC-urilor calibrate cu precizie și mențin o precizie ridicată și o liniaritate a conversiei în intervalul de temperatură de la –40 la +150 °C. Cu toate acestea, după cum s-a menționat mai sus, circuitele de compensare dinamică ale decalajului au ca rezultat zgomot crescut la ieșirea senzorului. Deci, dacă pentru senzorii liniari A1301, A1302 amplitudinea zgomotului de ieșire într-o bandă de 10 kHz nu depășește 150 μV, atunci pentru A1321–A1323 această valoare este deja cu două ordine de mărime mai mare - aproximativ 25 mV. În consecință, cu același coeficient de conversie de 2,5 mV/Gauss, rezoluția valorii minime a câmpului magnetic înregistrat pentru A1301 este de 0,06 Gauss, iar pentru A1323 este de 10 Gauss.

Utilizarea reglării tensiunii de alimentare pentru a scala câștigul de conversie LDC introduce o serie de provocări de proiectare. În primul rând, cerințele pentru stabilitatea tensiunii de alimentare sunt în creștere bruscă. În al doilea rând, ondulația și zgomotul tensiunii de alimentare modulează direct semnalul de ieșire al senzorului, afectând precizia măsurării, ceea ce necesită utilizarea unei filtre complexe și, prin urmare, face circuitul mult mai scump. Noua generație de senzori A1391, A1392 nu prezintă astfel de deficiențe (Fig. 6). Aceste microcircuite au o intrare separată de scalare a tensiunii de referință VREF, cu care puteți seta orice valoare pentru nivelul zero și factorul de conversie. În același timp, circuitul oferă o adâncime de suprimare a zgomotului pe baza tensiunii de alimentare de aproximativ 60 dB. Stabilizarea polarizării este similară cu A1321–A1323, dar amplitudinea zgomotului este redusă cu 20%.

Senzorii A1391 și A1392 implementează un mod de oprire electronică prin intrarea SLEEP. Când se aplică un zero logic acestei intrări, microcircuitul intră într-un mod de putere redusă (mai puțin de 25 μA), iar ieșirea senzorului intră în a treia stare cu impedanță ridicată. Acest lucru vă permite să combinați grupuri de senzori în paralel între ieșiri și să utilizați un singur ADC fără un multiplexor încorporat (Fig. 7). Sondajul senzorului poate fi efectuat de un microprocesor extern prin emiterea unui semnal logic către intrarea SLEEP a microcircuitului corespunzător.

Aplicarea LDH
Dintre domeniile de aplicare ale senzorilor Hall liniari, trebuie evidențiate două cele mai comune. Acestea sunt dispozitive pentru măsurarea și măsurarea deplasării liniare sau unghiulare curent electric.
Măsurarea mișcării liniare sau unghiulare
În majoritatea aplicațiilor, LDC-urile sunt utilizate împreună cu magneții permanenți pentru a măsura mișcarea obiectelor. Acest lucru se datorează faptului că pentru a menține liniaritatea maximă este necesar să se asigure o modificare mare a câmpului magnetic atunci când se modifică distanța dintre LDC și punctul de referință al obiectului în mișcare. Trebuie selectat un magnet permanent cu cea mai mare putere de câmp posibil, de exemplu SaCo sau AlNiCo.
Există mai multe opțiuni pentru poziția relativă a magnetului permanent și a LDC în sistemele de măsurare a mișcărilor obiectelor. Cea mai simplă metodă este o aranjare liniară a LDC și magnet pe aceeași axă, astfel încât liniile câmpului magnetic să intersecteze senzorul la un unghi de 90°. Cu acest aranjament, există o relație foarte neliniară între tensiunea de ieșire a LDC și distanța dintre acesta și magnet (Fig. 8). Pentru mișcări relativ mici, abaterea de la liniaritate este mică și nu este nevoie să se recurgă la liniarizare suplimentară. În caz contrar, este necesar să se utilizeze un circuit suplimentar pentru liniarizarea caracteristicii distanță-tensiune.

A doua opțiune este locația LDH și a magnetului plane paralele. Cu această orientare, sistemul are un punct de câmp zero, ceea ce face posibilă obținerea de informații suplimentare despre direcția de mișcare în funcție de semnul tensiunii de ieșire (de exemplu, la dreapta - o creștere a tensiunii, la stânga - o scădere (Fig. 9)). După cum se poate observa din fig. 9, regiunea centrală în raport cu punctul de deplasare zero are o liniaritate ridicată, care poate fi utilizată cu succes în aplicații precum potențiometre, corectoare de aer (supape pneumatice), senzori de poziție a accelerației etc. Apropo, în acest exemplu de realizare, datorită modificări de amplitudine mare în intensitatea câmpului magnetic în apropierea punctului zero, tensiunea de ieșire a LDC are, de asemenea, o gamă largă, ceea ce simplifică procesarea ulterioară a semnalului.

A treia opțiune este de a localiza LDC între doi magneți complementari (Fig. 10). Câmpurile complementare ale sistemului cu doi magneti asigură o bună liniaritate cu caracteristici de pantă mare. Acest sistem are și un punct de mișcare zero, care permite informații despre direcția de mișcare. Dezavantajul opțiunii descrise este gama destul de mică de mișcări într-un astfel de sistem, ceea ce îi limitează domeniul de aplicare.

Majoritatea opțiunilor luate în considerare, într-o măsură sau alta, necesită liniarizarea dependenței semnalului de ieșire de distanță. Acest lucru poate fi implementat folosind un ADC și un microcontroler dacă dispozitivul dezvoltat asigură controlul digital ulterior. Dacă rezultatul este un semnal analogic care este liniar cu distanța, procesul de liniarizare poate fi implementat cu ușurință folosind un circuit integrat analog programabil Anadigm (PAIC). În acest caz, este suficient să eliminați dependența experimentală a funcției de transformare o dată și să o introduceți sub forma unui tabel de coeficienți în mediul de dezvoltare. Pe lângă liniarizare, PAIS poate implementa, dacă este necesar prelucrare suplimentară semnal (amplificare, filtrare, detecție zero etc.).
Măsurarea curentului electric
Există număr mare metode de măsurare a curentului, dar numai trei dintre ele și-au găsit o largă aplicație în producția de produse de masă. Acestea sunt metoda rezistivă, senzorii transformator și senzorii de curent cu efect Hall. Metoda rezistivă este cea mai simplă și cea mai economică, dar are dezavantaje semnificative, inclusiv pierderi mari de putere pe rezistor și lipsa izolației galvanice a circuitelor de măsurare și măsurate. În plus, rezistențele de fir au o inductanță semnificativă, ceea ce nu permite utilizarea lor în circuite pentru măsurarea curenților pulsați și RF. Utilizarea rezistențelor puternice, fără inducție, cu peliculă groasă reduce efectul economic al acestei metode la zero. Utilizarea transformatoarelor de curent este o soluție mult mai costisitoare și, de asemenea, este posibilă numai atunci când se măsoară curentul alternativ pe o bandă de frecvență limitată.
Senzorii de curent cu efect Hall ocupă o poziție intermediară în preț între tipurile discutate mai sus. Principalele lor avantaje sunt absența pierderilor de conducție și capacitatea de a măsura atât curentul continuu, cât și curentul alternativ. În plus, elementul Hall este izolat de circuitul de curent, care asigură automat izolare galvanică. Necesitate alimentare externă nu poate fi numit un dezavantaj semnificativ, deoarece în marea majoritate a cazurilor senzorul nu este un dispozitiv terminal și după el mai există și alte componente de circuit care necesită și alimentare.
Deoarece intervalul de valori de inducție a câmpului magnetic măsurat de LDH este limitat, atunci când alegeți un design, este necesar să determinați corect configurația circuitului magnetic al senzorului. Intensitatea câmpului generată de sursa de curent trebuie să corespundă domeniului de măsurare LDC.
La măsurarea curentului de la câteva zeci la mii de amperi, senzorul Hall poate fi amplasat lângă conductor, fără a utiliza un circuit magnetic suplimentar. Pentru tipurile existente senzori, valoarea optimă pentru inducția câmpului magnetic poate fi considerată a fi de aproximativ 100 Gauss la mijlocul intervalului de măsurare. Acest lucru va asigura o sensibilitate acceptabilă a senzorului în ceea ce privește nivelul de zgomot de ieșire. Inducția câmpului magnetic creat de un conductor care poartă curent poate fi estimată folosind formula binecunoscută (în sistemul SI):
unde r este distanța dintre centrele conductorului și cipul senzorului Hall (Fig. 11). Atunci când alegeți poziția LDH în raport cu conductorul, este necesar să țineți cont de faptul că cea mai mare sensibilitate se obține atunci când liniile câmpului magnetic intersectează planul senzorului în unghi drept. Această metodă are dezavantajul că orice sursă externă de câmp magnetic va afecta citirile senzorului de curent.

Crește sensibilitatea și reduce influențele externe miez magnetic toroidal cu un gol în care este instalat un microcircuit LDH calibrat cu precizie de tip A1321–A1323 (Fig. 12). În acest caz, întregul câmp este concentrat în gol și practic nu există nicio influență externă. Inducția în decalaj poate fi estimată prin relația:

Principiul descris de măsurare a curentului este implementat în senzorii modulari de la Allegro Microsystems din familia ACS (Fig. 13, Tabelul 2).


Designul prezentat în Fig. 12, nu permite măsurarea unor valori mici de curent. Acest lucru se datorează limitării sensibilității LDC în ceea ce privește zgomotul de ieșire. Astfel, atunci când se folosește microcircuitul A1323, rezoluția inducției magnetice, limitată de zgomotul în banda de 10 kHz, este de 10 Gauss, sau aproximativ 1,5 A. Există două opțiuni: fie folosiți un LDC cu un amplificator liniar necompensat, fie folosiți un multiplu. -proiectarea virajului (Fig. 14) . În primul caz, așa cum se arată mai sus, sensibilitatea va crește la 0,06 Gauss, sau aproximativ 10 mA. Pentru a obține o astfel de sensibilitate într-un design cu mai multe ture, ar fi necesar să înfășurați mai mult de 150 de spire, ceea ce duce la o creștere bruscă a inductanței și poate fi inacceptabil. Prin urmare, în fiecare caz concret Există un compromis între rezoluția senzorului și lățimea de bandă. De exemplu, limitarea benzii de frecvență folosind un filtru trece-jos simplu RC la ieșirea LDH A1323 la 1 kHz va crește rezoluția la 0,1 A.

Concluzie
Am examinat cele mai populare două aplicații ale LDC-urilor, care fac posibilă simplificarea semnificativă a soluționării unei game largi de probleme la proiectarea echipamentelor pentru sistemele automate de control, alimentarea cu energie și tehnologia convertoarelor. Sperăm că acest material va fi util dezvoltatorilor atunci când aleg o anumită soluție tehnică.
Literatură
- O serie de articole dedicate circuitelor integrate analogice programabile Anadigm // Componente și tehnologii. 2005. Nr. 1–9.