أجهزة استشعار الحركة الخطية - الفروق الدقيقة الرئيسية
قسم الهندسة الإلكترونية والتكنولوجيا
خلاصة
حول الموضوع:
"أجهزة استشعار الحركة »
مينسك، 2008
أحد المكونات التي تحدد دقة أي نظام تحديد المواقع هو أجهزة استشعار الإزاحة. تم تصميم أجهزة استشعار الإزاحة لتحويل الكميات حركة خطيةأو زاوية دوران المسمار الرئيسي في رمز وحدوي: تسلسل بسيط من النبضات الكهربائية ذات المدة والسعة المتساوية، ويتناسب عددها بشكل مباشر مع مقدار الحركة الزاوية أو الخطية.
أجهزة الاستشعار الاستقرائية
لتحويل الكميات المتغيرة باستمرار إلى نبضات كهربائية منفصلة، يتم استخدام أجهزة الاستشعار الحثية والضوئية على نطاق واسع.
تظهر دائرة الاستشعار الاستقرائي في الشكل 1.
الشكل 1 - دائرة الاستشعار الاستقرائي.
يتم تثبيت سكة رفيعة مصنوعة من مادة مغناطيسية ناعمة على الجزء المتحرك من الماكينة. تعمل نتوءات الحامل 1 على تعديل المقاومة المغناطيسية لفجوة العمل عند الحركة. يحتوي القلب المغناطيسي للنواة 2 على شكل حرف Ш على ملفين متصلين ببعضهما البعض ويتم تغذيتهما من المحول Tr. يتم تضمين قطري الجسر الاستقرائي متر. في الموضع الأوسط، يكون جسر القياس متوازنًا وستكون إبرة الجهاز 3 عند الصفر. يؤدي عدم التوازن الطفيف إلى انحراف إبرة الأداة. سوف يكتشف المستشعر الجيد الصنع الحركات التي تصل إلى 2 ميكرومتر تقريبًا. بالنسبة للدوائر المنفصلة، يلزم وجود محول رقمي إلى تناظري (DAC).
أجهزة استشعار الإزاحة الضوئية.
يوجد على المسمار الرئيسي قرص به عدد كبير من الفتحات (من 100 إلى 800). يتم توجيه الضوء من المصباح عبر عدسة أسطوانية على شكل شعاع ضيق إلى القرص والكاشف الضوئي (الصمام الثنائي الضوئي). مع خطوة لولبية من الرصاص تبلغ 2 مم وعدد الفتحات على القرص 400، سيكون لكل نبضة كهربائية تمييز ~ 0.001 مم، ويزيد عدد الفتحات إلى 2000 ويزداد قطر القرص إلى 600 مم، مما غير مقبول.
لا يمكنك تثبيت قرص العد على المسمار الرئيسي، ولكن على العمود عالي السرعة المرتبط به. ولكن هذا سوف يقلل من دقة القراءة بسبب أخطاء الإرسال.
أجهزة استشعار الحركة الخطية الدقيقة
تم تصميم مستشعرات الإزاحة الخطية الدقيقة على أساس المقاييس النقطية وشبكات الحيود المترولوجية ومقاييس التداخل الليزرية. يعتمد النوعان الأولان من DLP على نفس مبدأ التحكم في الحركة. لديهم مقياس طويل على شكل ضربات مطبقة بشكل دوري ومقياس رؤية قصير مع نفس أو فترات متعددة من الضربات والثقوب. إذا كان التردد المكاني لترتيب الضربات على المقاييس لا يتجاوز 50-100 مم -1، فإنها تسمى المقاييس النقطية، وإذا كان أعلى من 100 مم -1 - شبكات الحيود المترولوجية (أو شبكات الحيود). نظرًا لأن اختلاف الحركات غالبًا ما يكون أقل من 1 ميكرون، فيبدو أنه كلما زاد تكرار السكتات الدماغية، أصبح من الأسهل تصميم دوائر لتوليد نبضات كهربائية. ومع ذلك، فإن الاستبدال البسيط لمقاييس البيانات النقطية بشبكات الحيود يكون معقدًا بسبب عدد من التأثيرات التي تنشأ في هذه الحالة، مما يجعل معالجة البيانات الرقمية حساسة للتغيرات في المسافة بين المقياس ومقياس الرؤية، والطول الموجي، وما إلى ذلك. لشبكات الحيود نوعان - أنظمة تراكمية وأنظمة تستخدم لوحات تأثير تموج في النسيج
أنظمة التجميع
تستخدم الأنظمة المتراكمة نظام شبكات بصرية عاكسة أو ناقلة. يظهر تصميم DLP البصري مع شبكة عاكسة في الشكل 2. يحتوي الحجاب الحاجز لرأس المسح على 4 شقوق. يتم وضع الشقوق بحيث يتم إزاحة إشارات الخرج الخاصة بالكاشفات الضوئية بمقدار ربع فترة قياس القياس. وبالتالي فإن الإشارات، بسبب إزاحة الشقوق، يتم إزاحتها في الطور والإشارات شبه الجيبية للكاشفات الضوئية. دقة هذه الأنظمة هي 0.5 ميكرون، مع خطأ إجمالي لا يزيد عن 1 ميكرون لقياس الحركات في حدود 1-2 سم.
عيب الطريقة: مطلوب التوازي الصارم بين خطوط الصفر ومسطرة المحرك. يستخدم نظام الشبكة الثاني طريقة هامش تموج في النسيج.
طريقة شريط تموج في النسيج.
خطوط تموج في النسيج هي نظام من المناطق المظلمة التي يتم تشكيلها عن طريق تركيب وإبراز شبكتين متماثلتين متباعدتين قليلاً بزاوية بالنسبة لبعضهما البعض.

الشكل 2 - عمليات إزاحة DLP باستخدام شبكة عاكسة.
1 - مصدر ضوء، 2 - عدسات مكثفة، 3 - مقياس فولاذي بشبكة، 4 - حاجز، 5 - كاشف ضوئي.
عندما يتم إزاحة الشبكات بالنسبة لبعضها البعض، فإن المناطق (المظلمة والفاتحة) تتحرك بالنسبة لبعضها البعض لأعلى ولأسفل بمسافة l. P هي درجة الميل، θ هي زاوية الميل.
المزايا الرئيسية للطريقة: (البصريات العاكسة)
1. لا يعتمد نمط التموج في النسيج على الطول الموجي للضوء عبر نطاق واسع نسبيًا من الأطوال الموجية. وهذا يسمح باستخدام المصابيح المتوهجة المصغرة العادية كمصدر للضوء.
2. يتم الحفاظ على التباين العالي لنمط تموج في النسيج مع وجود فجوات كبيرة نسبيًا (تصل إلى عشرة مم) بين الشبكات.
3. يمكن أن تتوافق خطوة نمط تموج في النسيج مع قيمة إزاحة أصغر بعدة مرات من المسافة بين ضربات الشبكة.
يتم تشكيل نمط تموج في النسيج عند مخرج شبكة شفافة. العرض الخطي لفترة نمط تموج في النسيج هو:
 , (1)
, (1)
حيث d 1 هو ثابت الشبكة الشفافة، θ هي زاوية دوران السكتات الدماغية.
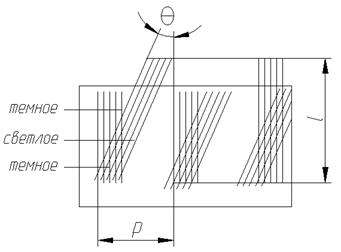
الشكل 3 - مخطط تشكيل خطوط تموج في النسيج.
في DLP، تبلغ هذه الزاوية حوالي 10 -4، بحيث تتوافق حركة الشبكة البالغة 1 ميكرومتر مع تحول نمط تموج في النسيج بمقدار 10 مم، والذي يمكن تسجيله بسهولة بواسطة كاشف ضوئي.
عادةً ما يكون جهازان للكشف الضوئي كافيين. عند التحرك فيها، يتم إنشاء الإشارات:
أنا 1 = ك 1 (ه 0 + إيكوس2πX/ε)(2)
أنا 2 = ك 2 (E 0 ± Esin2πX/ε)، (3)
حيث k 1، k 2 هي حساسية الكاشف الضوئي، E 0 هو مستوى المكون الثابت وسعة المكون المتغير لإضاءة نمط تموج في النسيج، X هو مقدار الحركة،
- سعر فترة رسم تموج في النسيج.d 2 هو ثابت محزوز الانعكاس، q i هو ترتيب الحد الأقصى للحيود.
بما أن 80% من الطاقة المنعكسة تحدث عند الحد الأقصى الثاني للانعكاس مع وجود مخاطر متساوية الساقين، فإن q = 2, ε = d 2 /4.
عند تحديد الموضع بدقة ±ε، تنشأ صعوبات الاستيفاء بسبب التقلبات في الإضاءة الثابتة E 0، والتي تعتمد على العديد من العوامل، بما في ذلك التقلبات في سطوع مصدر الضوء، وتغير انعكاس الشبكات، وما إلى ذلك.
لذلك، في بعض الأحيان يتم استخدام أجهزة الكشف الضوئية الموجودة على طول نمط التموج في DLP مع إزاحة ربع الفترة ويتم إنشاء إشارتين، تمثل كل منهما الفرق في إشارات اثنين من أجهزة الكشف الضوئية الموجودة على مسافة نصف الفترة نمط تموج في النسيج.
أنظمة تحديد المواقع مع مقاييس التداخل الليزرية
إن الرغبة في زيادة دقة أنظمة تحديد المواقع، والقضاء على اعتماد معلماتها على دقة تصنيع الأدلة وارتداءها أثناء التشغيل، أدت إلى إنشاء نوع جديد من أنظمة تحديد المواقع باستخدام مقاييس التداخل الليزرية.
دعونا نشرح بشكل نوعي، دون اللجوء إلى الصيغ، كيفية عمل مقياس تداخل الليزر.
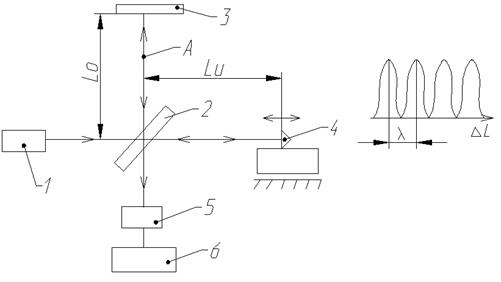
الشكل 4 - رسم تخطيطي بصري لمقياس تداخل الليزر.
1 – ليزر، 2 – مرآة شفافة، 3 – مرآة عاكسة ثابتة، 4 – عاكس مثبت على جزء متحرك، 5 – كاشف ضوئي، 6 – جهاز معالجة بيانات إلكتروني.
يتم تقسيم الشعاع الصادر من ليزر الهليوم-نيون منخفض الطاقة بواسطة مرآة شفافة إلى شعاعين - شعاع مرجعي وشعاع قياس. يمرر الشعاع المرجعي A المسار البصري من المرآة 2 إلى المرآة 3 ومن ثم إلى الكاشف الضوئي 5. ويذهب شعاع القياس B إلى العاكس المثبت على الجزء المتحرك، ثم يعود ويدخل الكاشف الضوئي. ونتيجة لذلك، تلتقي كلا الحزمتين وتتداخلان في الكاشف الضوئي. تعتمد شدة الضوء المسجلة بواسطة الكاشف الضوئي على الفرق في أطوال المسارات البصرية لكلا الحزمتين.
Δl = L و – L o . (4)
لنفترض أنه في وقت ما، اجتمعت الحزمتان المرجعية والقياسية في نفس المرحلة. وهذا يعني أنه في هذه اللحظة سيسجل الكاشف الضوئي أقصى شدة للضوء. ولكن إذا بدأ الجزء مع العاكس 4 في التحرك، فإن طول مسار القياس L يبدأ أيضًا في التغير. بمجرد أن يتغير Δl بمقدار نصف الطول الموجي للضوء الناتج عن الليزر، ستحدث إضافة الحزم في الكاشف الضوئي في الطور المضاد وسيسجل الكاشف الضوئي الحد الأدنى من الإشعاع - "الظلام". يتغير مسار شعاع القياس بمقدار نصف آخر من الطول الموجي ويصبح الضوء مرة أخرى في الكاشف الضوئي؛ إلخ. - ضوء الظلام، ضوء الظلام.
وبالتالي، عندما تتغير Δl بمقدار /2، تتغير شدة الضوء في الكاشف الضوئي من الحد الأقصى إلى الحد الأدنى أو العكس. إذا تم تحريك العاكس N مرات، فهذا يعني أن الجزء (الدعم) قد تحرك مسافة lectN/2. يتم حساب الرقم N بواسطة الجهاز الإلكتروني 6. وبالتالي يتم قياس حركة الجزء بالأطوال الموجية.
باستخدام مقاييس التداخل الليزرية، يتم قياس الإزاحات من مئات الميكرونات إلى عدة عشرات من الأمتار.
ومن الناحية العملية، عادةً ما يعمل مقياس التداخل الليزري جنبًا إلى جنب مع جهاز التحكم ببرنامج الآلة. لذلك، في وقت واحد مع التحكم في الحركة، يتم إجراء التصحيح التلقائي.
1 - رأس العمل (الأنبوب)؛ 2, 3 – عربات. 4 - المرايا. 6 - قياس الرؤوس؛ 7 - فاصل. 8 - الليزر. 9 – المنشور.
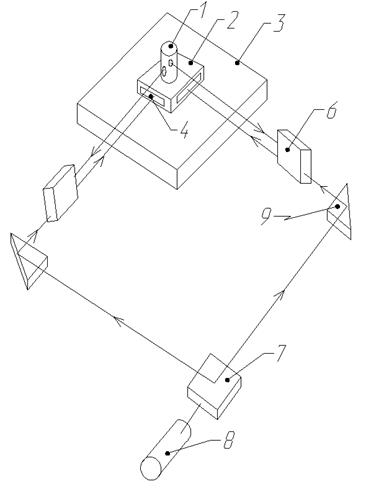
الشكل 5 - رسم تخطيطي لجدول إحداثيات مع مقياس تداخل ليزر.
يوضح الشكل 5 رسمًا تخطيطيًا لجدول الإحداثيات باستخدام مقياس تداخل ليزر. يحتوي هذا الجدول على مرآتين متعامدين بشكل متبادل مثبتتين على الحامل العلوي، وهما أذرع متحركة لمقاييس التداخل. يتم تثبيت مرآتين ثابتتين أو مقاييس تداخل على أنبوب رأس العمل.
وبالتالي، تحسب مقاييس التداخل الحركات المتبادلة على طول محورين للعربة العلوية بالنسبة إلى نظام إحداثيات ثابت. يمكن تصنيع المرايا بدرجة عالية من التسطيح، تصل إلى أعشار الميكرون. إنها لا تتآكل أثناء التشغيل، لذلك يتم الحفاظ على الدقة المتأصلة فيها لفترة طويلة. لضمان التعامد المتبادل للمرايا بدقة أجزاء من الثواني القوسية، يتم استخدام تقنيات بصرية خاصة. تعتمد دقة جدول الإحداثيات إلى حد كبير على دقة مقاييس التداخل. تتأثر دقة حساب الحركة بعاملين - عدم استقرار تردد إشعاع الليزر والتغيرات في الطول الموجي للإشعاع بسبب التقلبات في درجة الحرارة المحيطة والضغط والرطوبة. مشكلة استقرار التردد إشعاع الليزرتم حل المشكلة تقريبًا حاليًا، بالإضافة إلى أنه من الممكن تصحيح الخطأ باستخدام معلومات من أجهزة استشعار درجة الحرارة والضغط والرطوبة باستخدام الكمبيوتر.
الأدب
1. تصميم المعدات الراديوية الإلكترونية: كتاب مدرسي. دليل للجامعات / O. V. Alekseev، A. A. Golovkov، I. Yu. إد. أو في ألكسيفا. - م: أعلى. المدرسة، 2000. – 479 ص.
2. تكنولوجيا الأجهزة الإلكترونية الراديوية وأتمتة الإنتاج: كتاب مدرسي / أ.ب. دوستانكو، V. L. لانين، أ. خميل، ل.ب. أنوفرييف. تحت العام إد. أ.ب. دوستانكو. – من: أعلى. المدرسة، 2002
3. دليل مصمم REA: المبادئ العامةتصميم / إد. آر جي. فارلاموفا. - م: الإذاعة، 2000.
من السهل إرسال عملك الجيد إلى قاعدة المعرفة. استخدم النموذج أدناه
سيكون الطلاب وطلاب الدراسات العليا والعلماء الشباب الذين يستخدمون قاعدة المعرفة في دراساتهم وعملهم ممتنين جدًا لك.
تم النشر على http://www.allbest.ru/
وزارة التعليم والعلوم في الاتحاد الروسي
الدولة الفيدرالية المستقلة مؤسسة تعليميةالتعليم العالي
"جامعة تومسك البوليتكنيك الوطنية للبحوث"
معهد الطاقة
اتجاه التدريب (التخصص) 140400 "هندسة القوى الكهربائية والهندسة الكهربائية" (الأجهزة الكهربائية والإلكترونية)
قسم مجمعات الهندسة الكهربائية والمواد
ملاحظة توضيحية
لمشروع الدورة / العمل
في تخصص "الأجهزة الإلكترونية والكهربائية لأنظمة التشغيل الآلي"
حول هذا الموضوع" الاستشعارحركة خطية"
أكملها الطالب غرام. 5G 2G
في.أ. غونشاروف
مشرف
إ.ب. بوجدانوف
تومسك 2015
1. مستشعر الحركة
1.1 أجهزة استشعار الإزاحة بالسعة
1.2 مجسات الحركة الضوئية
1.3 أجهزة استشعار الإزاحة الاستقرائية
1.4 أجهزة استشعار الإزاحة الحالية الدوامة
1.5 أجهزة استشعار الإزاحة بالموجات فوق الصوتية
1.6 أجهزة استشعار الإزاحة المغناطيسية
1.7 أجهزة استشعار تأثير هول
1.8 أجهزة استشعار الإزاحة المغناطيسية
1.9 أجهزة استشعار الإزاحة الجهدية
1.10 جهاز استشعار حثينوع الحركات سلسلة LVDT SM
2. جزء الحساب
2.1 البيانات الأولية للحساب
2.2 الحساب الكهرومغناطيسي
2.3 الحساب الحراري
3. تعريف المعلمات وبناء الخصائص
3.1 تحديد اللاخطية لخاصية جهد الخرج لمستشعر الإزاحة الخطية LDT
3.2 خاصية إخراج الاستشعار
3.3 الرسم البياني لمعامل المنحدر الناتج
3.4 بناء خاصية الحمل
خاتمة
مراجع
1. مستشعر الحركة
مستشعر الحركةهو جهاز مصمم لتحديد حجم الحركة الميكانيكية الخطية أو الزاوية لجسم ما. بالطبع، تحتوي هذه الأجهزة على عدد هائل من التطبيقات العملية في مجموعة واسعة من المجالات، لذلك هناك العديد من فئات أجهزة استشعار الحركة التي تختلف في مبدأ التشغيل والدقة والسعر وغيرها من المعلمات. تجدر الإشارة على الفور إلى أنه يمكن تقسيم جميع أجهزة استشعار الإزاحة إلى فئتين رئيسيتين - أجهزة استشعار الحركة الخطيةو أجهزة استشعار الزاوية(الترميز). في هذه المراجعة، سيكون التركيز الرئيسي على أجهزة استشعار الحركة الخطية.
وفقًا لمبدأ التشغيل، يمكن أن تكون أجهزة استشعار الإزاحة:
بالسعة
بصري
· الاستقرائي
· التيار الدوامي
بالموجات فوق الصوتية
مقاوم للمغناطيسية
قياس الجهد
تقبُّض مغناطيسي
استنادا إلى تأثير هول
1.1 أجهزة استشعار الإزاحة بالسعة
يعتمد تشغيل أجهزة الاستشعار من هذا النوع على العلاقة بين سعة المكثف وتكوينه الهندسي. في أبسط الحالات، نحن نتحدث عن تغيير في المسافة بين اللوحات بسبب التأثير الجسدي الخارجي (الشكل 1). نظرًا لأن سعة المكثف تختلف عكسيًا مع حجم الفجوة بين اللوحين، فإن تحديد السعة باستخدام معلمات أخرى معروفة يسمح لنا بالحكم على المسافة بين اللوحين. يمكن تسجيل التغير في السعة بطرق مختلفة (على سبيل المثال، عن طريق قياس ممانعتها)، ولكن في أي حال يجب تضمين المكثف في الدائرة الكهربائية.
أرز. 1. مستشعر الإزاحة الخطية السعوية مع حجم فجوة متغير.
دائرة أخرى حيث تكون معلمة الإخراج السعة الكهربائية، عبارة عن دائرة تحتوي على مكثف بعازل متحرك (الشكل 2). يؤدي تحريك اللوحة العازلة بين ألواح المكثف أيضًا إلى تغيير في سعته. قد تكون اللوحة متصلة ميكانيكيًا بالجسم موضع الاهتمام، وفي هذه الحالة يشير التغير في السعة إلى حركة الجسم. بالإضافة إلى ذلك، إذا كان الكائن نفسه له خصائص عازلة وأبعاد مناسبة، فيمكن استخدامه مباشرة كوسط عازل في مكثف.
أرز. 2. مستشعر الإزاحة الخطية السعوية مع عازل متحرك.
1.2 أجهزة استشعار الحركة البصرية
هناك العديد من الاختلافات في دوائر مستشعر الحركة بناءً على تأثيرات بصرية مختلفة. ولعل الأكثر شيوعًا هو نظام التثليث البصري - فمستشعر الموضع هو في الواقع جهاز تحديد المدى الذي يحدد المسافة إلى الجسم محل الاهتمام، ويسجل الإشعاع المتناثر على سطح الجسم ويحدد زاوية الانعكاس، مما يجعله من الممكن تحديد الطول د - المسافة إلى الجسم (الشكل 3) . من المزايا الهامة لمعظم أجهزة الاستشعار البصرية القدرة على إجراء قياسات عدم الاتصال، بالإضافة إلى ذلك، عادة ما تكون هذه المستشعرات دقيقة للغاية ولها أداء عالٍ.
أرز. 3. مستشعر الإزاحة الضوئية المعتمد على دائرة التثليث الضوئية.
يستخدم تطبيق آخر للمستشعر البصري، المصمم لتسجيل وتحديد معلمات الحركات والاهتزازات الصغيرة، بنية شبكية مزدوجة، بالإضافة إلى مصدر ضوء وكاشف ضوئي (الشكل 4). إحدى الشبكة ثابتة، والثانية متحركة ويمكن تثبيتها ميكانيكيًا على الجسم محل الاهتمام أو نقل حركتها بطريقة ما إلى المستشعر. تؤدي الإزاحة الصغيرة للشبكة المتحركة إلى تغير في شدة الضوء المسجلة بواسطة الكاشف الضوئي، ومع انخفاض فترة الشبكة، تزداد دقة المستشعر، لكن نطاقه الديناميكي يضيق.
الشكل 4. جهاز استشعار الإزاحة البصرية على أساس حواجز شبكية الحيود.
تتمتع أجهزة الاستشعار البصرية التي تأخذ في الاعتبار استقطاب الضوء بإمكانيات تطبيق إضافية. يمكن لمثل هذه المستشعرات تنفيذ خوارزمية لاختيار الكائنات بناءً على الخصائص العاكسة للسطح، أي. يستطيع المستشعر "الانتباه" فقط إلى الكائنات ذات الانعكاس الجيد، ويتم تجاهل الكائنات الأخرى. وبطبيعة الحال، فإن الحساسية للاستقطاب تؤثر سلبا على تكلفة هذه الأجهزة.
1.3 أجهزة استشعار الإزاحة الاستقرائية
في أحد تكوينات هذا النوع من أجهزة الاستشعار، يكون عنصر الاستشعار عبارة عن محول أساسي متحرك. يؤدي تحريك جسم خارجي إلى تحرك النواة، مما يؤدي إلى تغيير في رابط التدفق بين اللفات الأولية والثانوية للمحول (الشكل 5). وبما أن سعة الإشارة في الملف الثانوي تعتمد على وصلة التدفق، فيمكن استخدام سعة الملف الثانوي للحكم على موضع القلب، وبالتالي موضع الجسم الخارجي.
أرز. 5. مستشعر الإزاحة الحثي على المحول.
تكوين آخر لديه المزيد رسم تخطيطي بسيطومع ذلك، فهو مناسب فقط لعدد صغير من التطبيقات حيث يكون من الضروري اكتشاف الحركات أو الاهتزازات الصغيرة للأشياء التي تتكون من مادة مغناطيسية حديدية. في هذه الدائرة، يلعب الجسم المغناطيسي محل الاهتمام دور الدائرة المغناطيسية، التي يؤثر موضعها على محاثة ملف القياس (الشكل 6).
أرز. 6. مستشعر الإزاحة الحثي للأشياء المصنوعة من المواد المغناطيسية.
1.4 أجهزة استشعار الإزاحة الحالية الدوامة
تحتوي أجهزة الاستشعار من هذا النوع على مولد المجال المغنطيسيومسجل يتم من خلاله تحديد حجم تحريض المجالات المغناطيسية الثانوية. بالقرب من الجسم محل الاهتمام، يقوم المولد بإنشاء مجال مغناطيسي، والذي يخترق مادة الجسم، ويولد في حجمه تيارات دوامية (تيارات فوكو)، والتي بدورها تنشئ مجالًا مغناطيسيًا ثانويًا (الشكل 7). يتم تحديد معلمات المجال الثانوي بواسطة المسجل، وعلى أساسها يتم حساب المسافة إلى الجسم، حيث أنه كلما كان الجسم أقرب، كلما زاد التدفق المغناطيسي الذي يخترق حجمه، مما سيعزز التيارات الدوامية والتحريض من المجال المغناطيسي الثانوي. يتم استخدام مبدأ مماثل في أجهزة الكشف عن عيوب التيار الدوامي، ومع ذلك، لا تتأثر معلمات المجال المغناطيسي الثانوي بالمسافة إلى الجسم، ولكن بوجود عيوب مخفية في بنيته الداخلية. الطريقة هي عدم الاتصال، ولكن يمكن استخدامها فقط للأجسام المعدنية.
أرز. 7. مستشعر إزاحة التيار الدوامي.
1.5 أجهزة استشعار الإزاحة بالموجات فوق الصوتية
لف المحولات الاستشعار الكهرومغناطيسي
تطبق أجهزة الاستشعار بالموجات فوق الصوتية مبدأ الرادار - يتم تسجيل الموجات فوق الصوتية المنعكسة من جسم ما، وبالتالي يتم تمثيل المخطط الهيكلي عادة بمصدر للموجات فوق الصوتية ومسجل (الشكل 8)، والتي عادة ما تكون محاطة بجسم مدمج. يتيح لك تحديد التأخير الزمني بين لحظات إرسال واستقبال نبضة بالموجات فوق الصوتية قياس المسافة إلى الجسم بدقة أعشار المليمتر. إلى جانب أجهزة الاستشعار البصرية، ربما تكون أجهزة الاستشعار بالموجات فوق الصوتية هي أداة قياس عدم الاتصال الأكثر تنوعًا وتقدمًا من الناحية التكنولوجية اليوم. يمكن العثور على استخدام مبدأ القياس هذا مرة أخرى في أجهزة كشف العيوب، ولكن هذه المرة فقط في أجهزة كشف العيوب بالموجات فوق الصوتية.
أرز. 8. مستشعر الإزاحة بالموجات فوق الصوتية.
1.6 أجهزة استشعار الإزاحة المغناطيسية
تستخدم مستشعرات الإزاحة المغناطيسية اعتماد المقاومة الكهربائية للصفائح المقاومة المغناطيسية على اتجاه وحجم تحريض المجال المغناطيسي الخارجي. يتكون المستشعر، كقاعدة عامة، من مغناطيس دائم ودائرة كهربائية تحتوي على لوحات مقاومة مغناطيسية متصلة عبر دائرة جسر ومصدر الجهد المستمر(الشكل 9). جسم محل الاهتمام، يتكون من مادة مغناطيسية حديدية، تتحرك في مجال مغناطيسي، يغير تكوينه، ونتيجة لذلك تتغير مقاومة الصفائح، وتسجل دائرة الجسر عدم تطابق، يمكن استخدام حجمه للحكم على موضع الكائن.
أرز. 9. أجهزة استشعار الإزاحة المغناطيسية.
1.7 أجهزة استشعار تأثير هول
أجهزة الاستشعار من هذا النوع لها تصميم مماثل لتصميم أجهزة الاستشعار المقاومة المغناطيسية، ولكن عملها يعتمد على تأثير هول - مرور التيار عبر موصل معرض لمجال مغناطيسي خارجي يؤدي إلى ظهور فرق الجهد في المقطع العرضيموصل.
1.8 أجهزة استشعار الإزاحة المغناطيسية
كقاعدة عامة، يعد مستشعر التضيق المغناطيسي عبارة عن قناة ممتدة - دليل موجي، حيث يمكن للمغناطيس الدائري الدائم أن يتحرك بحرية. يوجد داخل الدليل الموجي موصل قادر على إنشاء مجال مغناطيسي بطوله بالكامل عند تطبيق نبضات كهربائية عليه (الشكل 10). تتم إضافة المجال المغناطيسي الناتج إلى مجال المغناطيس الدائم، ويخلق المجال الناتج عزم دوران القناة التي تحتوي على الدليل الموجي (تأثير فايدمان). تنتشر نبضات الدوران على طول القناة في كلا الاتجاهين بسرعة صوت مادة القناة. إن تسجيل التأخير الزمني بين إرسال نبضة كهربائية واستقبال نبضة دورانية يجعل من الممكن تحديد المسافة إلى المغناطيس الدائم، أي. تحديد موقفها. القناة يمكن أن يكون تماما طول أطول(يصل إلى عدة أمتار)، ويمكن تحديد موضع المغناطيس بدقة عدة ميكرومترات. تتمتع أجهزة الاستشعار المغنطيسية بقابلية تكرار ممتازة، ودقة وضوح، ومتانة في البيئات القاسية، وحساسية منخفضة للتغيرات في درجات الحرارة.
أرز. 10. مستشعر الإزاحة المغناطيسية.
1.9 أجهزة استشعار الإزاحة الجهد
يعتمد المستشعر من هذا النوع على دائرة كهربائية تحتوي على مقياس الجهد (الشكل 11). تؤدي الحركة الخطية لجسم ما إلى تغيير في مقاومة مقياس الجهد ( المقاوم المتغير). إذا تم تمرير تيار مباشر عبر مقياس الجهد، فإن انخفاض الجهد عبره سيكون متناسبًا مع قيمة المقاومة، وبالتالي مع مقدار الحركة الخطية للكائن المعني.
أرز. 11. مستشعر الإزاحة الجهدية.
إلى جانب أجهزة استشعار الإزاحة الميكانيكية، تُستخدم أجهزة استشعار قياس الجهد على نطاق واسع نظرًا لبساطتها وتكلفتها المنخفضة، ولكن بالنسبة للقياسات العالمية والدقة وعدم الاتصال، فقد تم مؤخرًا استخدام أجهزة الاستشعار القائمة على التأثيرات البصرية بشكل متزايد.
عند تشغيل أنظمة التشغيل الآلي ومعدات قياس المعلومات، هناك حاجة لقياس وتحليل مختلف الكميات الفيزيائية. في كثير من الأحيان، من الضروري إحضارهم إلى النموذج والشكل المناسب لمزيد من المعالجة، ولكن غير قابل للإدراك المباشر. وتستخدم أجهزة الاستشعار لهذه الأغراض.
يُقصد بالمستشعر العنصر الذي يحول القيمة الخاضعة للتحكم من نوع واحد إلى قيمة من نوع آخر، وهو أكثر ملاءمة للتأثير على العنصر التشغيلي لنظام التحكم الآلي. في المستشعر الكهربائي، يؤدي التغيير في المعلمة الخاضعة للتحكم (غالبًا غير الكهربائية) عند الإدخال إلى تغيير معين في المعلمة الكهربائية للخرج، مما يؤدي إلى تغيير (تبديل) التيار أو المجالات الكهرومغناطيسية في الدائرة الكهربائيةفي إخراج الاستشعار. ولذلك، تصنف أجهزة الاستشعار عادة على أنها أجهزة كهربائية.
اعتمادًا على نوع الكمية التي يتم التحكم فيها، يتم تمييز المستشعرات: الإزاحة الميكانيكية الخطية أو الزاويّة، والسرعة، والتسارع، وعزم الدوران، ودرجة الحرارة، والضغط، وما إلى ذلك.
تنقسم أجهزة الاستشعار إلى مجموعتين كبيرتين:
سلبي أو حدودي.
نشط، أو مولد.
تتضمن المجموعة الأولى أجهزة استشعار غير قادرة على إنشاء إشارة كهربائية بشكل مستقل عند الإخراج. يقوم المستشعر، تحت تأثير القيمة الخاضعة للتحكم، بتغيير معلماته الداخلية فقط، مما يؤدي في النهاية إلى تغيير في إشارة الخرج. لا تحتاج المستشعرات النشطة إلى مصدر طاقة خارجي؛ فهي تحت تأثير القيمة المقاسة، فهي تولد إشارة كهربائية، عادة في شكل قوة دافعة كهربية.
مراجعة التصاميم الحالية
من بين مجموعة واسعة من تعديلات التصميم لأجهزة استشعار الإزاحة الخطية (LMS) مع المعلمات التشغيلية والمترولوجية المحسنة والوظائف الواسعة، تبرز LMS القائمة على الأنظمة المغناطيسية الموزعة. الأكثر انتشارًا بين هذه الفئة من DLP هي أجهزة الاستشعار التفاضلية نوع المحولوالتي يتم تقييم خصائصها عادةً باستخدام عدة خصائص.
1. درجة التطابق بين دوال التحويل الحقيقية والمحسوبة، والتي يمكن وصفها بنسبة اللاخطية إلى كسب Ki. ل أجهزة الاستشعار الخطيةدقة عالية، يجب ألا تتجاوز اللاخطية لخاصية الإخراج 0.1-0.2٪.
2. تحول الطور لجهد الخرج بالنسبة لجهد الإثارة؛ التغير في تحول الطور عند تحريك الجزء المتحرك من DLP.
3. حساسية DLP. عند جهد الإثارة الثابت، يتم تعريفه على أنه ظل منحدر خاصية الخرج.
بالإضافة إلى ما سبق المعلمات الهامةاعتمادًا على مجال تطبيق DLP، يتم أيضًا تضمين قيمة القوى التفاعلية على الجزء المتحرك، والأبعاد الإجمالية والوزن، وتكرار الخصائص، والموثوقية، وكثافة الطاقة، وما إلى ذلك.
إن اعتماد معلمة الإخراج Y للمستشعر على قيمة الإدخال X هو السمة الرئيسية للمستشعر. اعتمادًا على نوع المستشعر، يمكن أن يكون خطيًا أو غير خطي.
تسمى نسبة زيادة قيمة الإخراج إلى زيادة قيمة الإدخال بحساسية المستشعر:
تحدد مدة العملية العابرة سرعة المستشعر. عادةً، يتعين على أجهزة الاستشعار أن تتمتع بأقصى قدر من الحساسية والسرعة. بالإضافة إلى ذلك، أحد المتطلبات الرئيسية هو أن تظل معلمات وخصائص المستشعر مستقرة بمرور الوقت وعندما تتغير ظروف التشغيل (درجة الحرارة والضغط والرطوبة وموضع المستشعر وما إلى ذلك).
في الوقت الحاضر، يتم استخدام المحول التفاضلي الهوائي (ADT) على نطاق واسع. في الدائرة المغناطيسية لهذا المحول، يتكون القلب فقط من مادة مغناطيسية حديدية؛ والنير غائب أو هو الهواء.
تُستخدم المحولات التفاضلية على نطاق واسع في صناعة الأدوات، لأنه بدون نير موصل مغناطيسيًا، تحسنت الخطية لخاصية الخرج بشكل كبير وانخفض "تأثير الملف اللولبي" بشكل حاد.
أفضل الخصائص لها محول تفاضلي ثلاثي الملفات، كما هو موضح في الشكل 1. يتكون المستشعر من دائرة مغناطيسية خارجية 1، ونواة متحركة 2 وملف يتم تثبيت ملف الإثارة 3 وأقسام ملف التشغيل (RO) 4 عليه. تقع ومتصلة على التوالي بطريقة معاكسة للتيار.
عندما يتم تشغيل لف الإثارة الاستشعار من المصدر تكييفومتوسط موضع القلب، فإن المجالات الكهرومغناطيسية المستحثة في أقسام ملف العمل الموجودة على جانبي القلب متساوية في الحجم ومعاكسة في الطور. ولذلك، فإن EMF الناتج وجهد الخرج يكونان في حدهما الأدنى. إذا تم إزاحة القلب من الموضع الأوسط، يتعطل التوازن ويزداد جهد الخرج.
يتم تحديد المنحدر والخطية لجهد الخرج من خلال توحيد الاقتران الكهرومغناطيسي بين اللفات، والذي يتم ضمانه من خلال التوزيع الموحد لأجزاء ملف العمل فوق ملف الإثارة ونسبة دورات هذه اللفات فوق القلب .
من تحليل تصميمات المستشعرات الموجودة، يترتب على ذلك أن تصميم المستشعر من نوع LDT (المحول التفاضلي الخطي) (الشكل 12) يمكن أن يؤخذ كأساس للتصميم، نظرًا لأن التصميمات الأخرى لا توفر المتطلبات المطلوبة الأبعاد الشاملة. بالإضافة إلى أجهزة الاستشعار نوع مماثلوتتميز بالبساطة النسبية في التصميم والموثوقية العالية واستقرار المعلمات.
المستشعر عبارة عن محول تفاضلي خطي (LDT) مع نير هوائي. يتكون المستشعر من مبيت 1، دائرة مغناطيسية 2، ملف 3، زجاج 4. مخطط كهربائييظهر المستشعر في الشكل. 13.
أرز. 12. محول تفاضلي ثلاثي الملفات.
أرز. 13. الدائرة الكهربائية لمستشعر LDT.
الجسم عبارة عن أسطوانة مجوفة بسمك جدار 1 مم. ولضمان متطلبات البيانات الأولية ومقاومتها للمؤثرات الخارجية، فهي مصنوعة من أنبوب غير مغناطيسي (فولاذ 12X18PI10T).
لتقليل الطاقة التي يستهلكها المستشعر وتقليل تأثير المجالات المغناطيسية الخارجية على معلماته، يتم وضع دائرة مغناطيسية خارجية داخل المبيت، وهي عبارة عن أنبوب مصنوع من مادة مغناطيسية 79 نانومتر بسمك 0.35 ملم. تعتبر سبيكة 79NM أقل شأنا من المواد المغناطيسية الناعمة الأخرى من حيث النفاذية المغناطيسية، ولكنها تتمتع بمواصفات عالية المقاومة الكهربائيةواعتماد صغير لـ m على التردد. وبالإضافة إلى ذلك، فهو يتميز بانقباض مغناطيسي منخفض وإكراه منخفض. تضمن لزوجة المادة ولدونتها استخدام طرق متقدمة لتصنيع الدائرة المغناطيسية (الرسم، الختم، الثني، إلخ).
يتكون الملف من إطار مصنوع من البلاستيك الفينولي، حيث يتم وضع اللف الأساسي OB (لف الإثارة) وقسمين من اللف الثانوي P 01 و P 02 (أقسام لف العمل). ترتبط اللفات العاملة في سلسلة في اتجاهين متعاكسين. يتم لحام خيوط اللف إلى بتلات الوسادة، وبعد ذلك سلك التثبيتاخرج. الزجاج عبارة عن أسطوانة مجوفة مصنوعة من الفولاذ غير المغناطيسي، يوضع بداخلها الجزء المتحرك مع وجود فجوة مضمونة.
الجزء المتحرك من المستشعر عبارة عن قلب مصنوع من ألواح مغناطيسية ناعمة. يستخدم المستشعر المعني نظرة جديدةالأساسية، باعتبارها متقدمة تقنيًا وتحسين الخطية لخاصية الإخراج. القلب عبارة عن أنبوب مجوف بقضيب مصنوع من الفولاذ المقاوم للصدأ(قضيب) مملوء بصفائح رقيقة من مادة مغناطيسية ناعمة ومملوءة بمركب لعدم الحركة.
المستشعر من نوع المحول التفاضلي، ويعتمد مبدأ تشغيله على التغير في الحث المتبادل بين أقسام ملف العمل ولف الإثارة عندما يتحرك القلب. عندما يتم تغذية ملف الإثارة للمستشعر من مصدر تيار متردد ويكون القلب في الموضع الأوسط (موضع الصفر)، فإن المجال الكهرومغناطيسي المستحث في أقسام ملف العمل يكون متساويًا في الحجم ومعاكسًا في الطور، وبالتالي فإن المجال الكهرومغناطيسي الناتج والجهد الناتج هو الحد الأدنى. إذا تم إزاحة القلب من الموضع الأوسط، يتعطل التوازن ويزداد جهد الخرج.
يتغير جهد الخرج بشكل متناسب مع مقدار حركة النواة. عندما يمر القلب عبر موضع الصفر، يتغير طور جهد الخرج بمقدار 180 درجة.
يتطلب الاستخدام المنفصل للمشغل والمستشعر وجود وصلة وسيطة بين هذه الأجهزة، بالإضافة إلى زيادة عدد الأسلاك الموردة. وهذا يؤدي إلى زيادة كتلة الأجزاء المتحركة، وانخفاض الأبعاد والموثوقية وزيادة التكلفة. لذلك، يتم دمج المشغل والمستشعر في جهاز واحد، يسمى محول الطاقة الكهرومغناطيسي الخطي مع مستشعر موضع مدمج (LEP) (الشكل 14).
أرز. 14. منظر عام لخطوط الكهرباء.
أرز. 15. مخطط تصميم أجهزة الاستشعار.
أرز. 16. رسم تخطيطي لتصميم المحرك.
يتكون خط الكهرباء من اثنين العناصر الرئيسية: المستشعر 1 والمحرك 4 مدمجان في جهاز واحد. المستشعر عبارة عن أسطوانة يوجد بها الجزء المتحرك 3 والملف 2. يتكون المحرك من مبيت يوجد بداخله عضو متحرك 5. الجزء المتحرك من المستشعر وعضو الإنتاج متصلان ببعضهما البعض بشكل صارم ويمكن أن تتحرك. ترتبط المرساة بالجسم العامل للوحدة، ويتم قياس حركتها.
عندما يتم تطبيق إشارة التحكم على المشغل، يبدأ عضو الإنتاج في التحرك إلى اليسار أو اليمين. تتم إزالة الجهد المتردد من ملف المستشعر، والذي تتناسب سعته مع مقدار حركة الجزء المتحرك.
يظهر الرسم التخطيطي لتصميم المستشعر في الشكل. 15.
تم اعتماد النظام الكهرومغناطيسي كأساس لتصميم المشغل، لأنه يلبي متطلبات المواصفات الفنية بشكل كامل. يظهر الرسم التخطيطي لتصميم المشغل (المشار إليه فيما يلي باسم المحول) في الشكل. 16.
يتكون المحول من غلاف فولاذي 1، يتم لصق المغناطيس الدائم 4 على سطحه الداخلي، من أجل الموثوقية، يتم ضغط المغناطيس بجوز 3. يوجد داخل السكن محرك يتكون من إطار غير مغناطيسي 7 مع. اللف الموجود عليه العاصمة 5. يمكن أن يتحرك عضو الإنتاج بحرية في السكن على البطانات البرونزية 8، 9. ويتم التوصيل الكهربائي بين الدائرة الخارجية والملف باستخدام موصلات مرنة.
لزيادة القوة التي يطورها عضو الإنتاج، وكذلك لتقليل الطاقة التي يستهلكها المحول، يتم تثبيت دائرة مغناطيسية إضافية 6 بين المغناطيس وعضو الإنتاج، وهي عبارة عن أسطوانة مجوفة مصنوعة من سبيكة مغناطيسية حديدية 50НХС.
لتوصيل ملفات المستشعر والمحول بالدائرة الخارجية، يتم تثبيت القابس 2 على السكن.
يعتمد مبدأ تشغيل المحول على تفاعل اثنين من التدفقات: التدفق المستقطب الناتج عن المغناطيس الدائم والتدفق العامل الناتج عن ملف عضو الإنتاج. نتيجة لهذا التفاعل، يطور عضو الإنتاج قوة يتناسب حجمها مع حجم التيار المتدفق خلال الملف.
1.10 نوع مستشعر الإزاحة الحثيLVDTمسلسلم.
تعتبر المحولات التفاضلية الخطية المتغيرة (LVDTs) (الشكل 17) مثالية للتطبيقات في البيئات الصناعية القاسية مثل درجات الحرارة المرتفعة أو الضغط أو الديناميكيات الثابتة أو دورات الإنتاج الطويلة.
أرز. 17. جهاز استشعار الإزاحة الحثي من نوع LVDT من سلسلة SM.
تحديد :
الإزاحة الاسمية (Lnom) 0-2…200، مم
اللاخطية،٪: 0.2 أو 0.3
نطاق درجة الحرارة الاسمية، _ درجة مئوية: -40...+120 (+150)
المواد: فولاذ مطلي بالنيكل
فئة الحماية: IP67 (IP68)
تردد العرض كيلو هرتز: 2…10
الفولطية (Unom)، الخامس: 3
الأبعاد الكلية مم لا أكثر: القطر 12 × (220 - 1593)
بعد تحليل الهياكل الموجودة، تم اتخاذ أساس التصميم لتصميم جهاز استشعار من نوع LDT (المحول التفاضلي الخطي) وتم إجراء المزيد من الحسابات باستخدام هذا المستشعر.
2. جزء الحساب
2.1 البيانات الأولية لحساب
1. جهد الإمداد U 1 = 7 فولت؛
2. تردد جهد الإمداد و= 2000 هرتز؛
3. الاستهلاك الحالي أنا 1 = 0.02A؛
4. حجم جهد الخرج في وضع الصفر U max = 0.7 فولت؛
5. المنحدر المميز للإخراج K=0.05mm -1؛
6. شوط العمل للجزء المتحرك l p =10?10 -3 m;
7. الطول الأساسي l c =20?10 -3;
8. النفاذية المغناطيسية الفعالة للنواة (لسبائك 50 HXC)
10. المقطع العرضي الأساسي S c =S B =7?10 -6 m2;
11. قطر الإطار على طول حواف الملف الأساسي D k 1 =10?10 -3 m;
12. قطر الإطار تحت اللف الثانوي D k 2 = 8؟ 10 -3 م؛
13. قطر إطار السيارة D = 8?10 -3 م.
2.2 الحساب الكهرومغناطيسيت
المفاعلة الحثي للملف الأولي:
محاثة اللف الأولية:
عدد دورات اللف الأساسي تحت القلب:
لضمان الخطية العالية للخاصية، من الضروري أن يكون محاثة الملف الأولي قيمة ثابتة عندما يتحرك القلب خلال شوط العمل بأكمله. لذلك، يجب أن يتم لف اللف بإحكام بحيث يدور على طول الإطار بالكامل. طول الإطار:
عند اللف عند خدود الإطار، يتم الحصول على لف غير خطي بطول حوالي 1.5 مم عند كل خد. وفي هذا الصدد، يجب زيادة طول الإطار بمقدار 3 ملم. نحن نأخذ l k = 43 ملم. إجمالي عدد دورات اللف الأولي:
بالنسبة لللف، يتم اختيار سلك من درجة PET - 155 بقطر السلك d = 0.125 مم وقطر العزل d = 0.155 مم.
عدد اللفات في الطبقة الواحدة:
عدد طبقات اللف الأولي:
يجب أن يكون عدد الطبقات عددًا صحيحًا، ولأسباب تتعلق بالتصميم، يجب أن يكون متساويًا، بحيث تكون بداية ونهاية اللف على نفس خد الإطار. نأخذ ن 1 = 6 طبقات.
عدد محدد من دورات اللف الأساسي:
العدد المحدد من دورات اللف الأساسي تحت القلب:
قيمة الحث المحددة:
إجمالي الحث الأولي:
المقاومة النشطة للملف الأساسي:
مقاومة الدائرة الأولية:
استهلاك الاستشعار الحالي:
الكثافة الحالية لللف الأولي:
عدد دورات قسم اللف الثانوي عند تحريك القلب بالشوط الكامل:
عدد اللفات في الطبقة:
عدد طبقات قسم اللف الثانوي:
يجب أن يكون عدد دورات اللف عددًا صحيحًا وحتى. نحن نقبل ن 2 = 8.
عدد دورات قسم اللف الثانوي:
المقاومة النشطة لقسم اللف الثانوي:
محاثة قسم اللف الثانوي:
الحث الكلي للملف الثانوي:
القطر الخارجي لملف الاستشعار:
الفولتية عند أطراف ملف العمل في الموضع الصفري للجزء المتحرك:
2.3 الحساب الحراري
عندما يتدفق التيار عبر الأجزاء الحية من جهاز كهربائي، تحدث خسائر الطاقة الكهربائيةعلى شكل حرارة. في حالة عامة الطاقة الحراريةيتم إنفاقه على زيادة درجة حرارة الجهاز ويتبدد جزئيًا في البيئة.
مع ارتفاع درجة الحرارة، يحدث ذلك تسارع الشيخوخةعزل الموصلات وتقليل قوتها الميكانيكية. على سبيل المثال، يتم تقليل عمر خدمة العزل مع زيادة درجة الحرارة على المدى الطويل بمقدار 8 درجات مئوية فقط فوق القيمة الاسمية بمقدار النصف. لذلك، في جميع أوضاع التشغيل الممكنة، يجب ألا تتجاوز درجة حرارتها هذه القيم التي تضمن مدة تشغيل الجهاز المحددة.
دعونا نحسب ارتفاع درجة حرارة ملف الاستشعار.
وفقًا لقانون نيوتن-ريتشمان، يتم تعريف ارتفاع درجة حرارة الملف على النحو التالي:
يستخدم ملف هذا المستشعر العزل من الفئة A، درجة الحرارة المسموح بهاالتدفئة ش=105 _ ج؛
ثم المقاومة الأسلاك النحاسيةعند درجة حرارة 105_C:
المقاومة النشطة عند درجة حرارة اللفات 105_C:
الإثارة:
العمال:
مقاومة الدائرة للملفات الأولية والثانوية:
الطاقة المتحررة في اللفات الأولية والثانوية:
إجمالي الطاقة:
سطح تبريد الملف:
تسخين الملف:
درجة حرارة سطح الحالة المستقرة:
أولئك. لا تتجاوز درجة الحرارة درجة الحرارة المسموح بها لفئة العزل هذه.
خاتمة : استنادا إلى البيانات التي تم الحصول عليها من الحسابات الكهرومغناطيسية والحرارية، يمكننا القول أن المعلمات التي تم الحصول عليها مقبولة لهذا النوع من أجهزة الاستشعار، لأن استيفاء المتطلبات المحددة، وبالتالي يمكنك الانتقال إلى المرحلة التالية من تصميم الدورة التدريبية.
3. تعريف المعلمات وبناء الخصائص
الشكل 18. مقعد المختبر للتوصيف
3.1 تحديد اللاخطية لخاصية جهد الخرج لمستشعر الإزاحة الخطية LDT
مقاومة حمل الحساس 10 كيلو أوم:
نطاق تشغيل المستشعر: ±30 مم؛
"+" - حركة القضيب نحو المستشعر؛
"-" - حركة القضيب داخل المستشعر.
يتم تحديد اعتماد جهد الخرج لمستشعر LDT-3522 على الحركة عند النقاط:
30;-25;-20;-15;-10;-5;0;5;10;15;20;25;30 ملم.
يتم إدخال نتائج القياس في الجدول 1.
الجدول 1. البيانات التجريبية.
يتم حساب اللاخطية للخصائص (الشكل 19) بالصيغة:
حيث Ui هو الجهد المقاس عند النقاط الموضحة في الجدول، V؛
لى - النقاط المبينة في الجدول، مم؛
K هو ميل خاصية جهد الخرج في نهاية نطاق التشغيل؛ lk = 30 ملم - نطاق العمل.
مثال لحساب نقطة واحدة:
معامل ليتم حسابه بشكل منفصل في الاتجاهات الإيجابية والسلبية باستخدام الصيغة:
أين ش خارج - الجهد في نهاية نطاق التشغيل.
أرز. 19. عدم خطية الخاصية عند تحريك المستشعر
3.2 خاصية إخراج الاستشعار
خاصية الخرج للمستشعر هي اعتماد جهد الخرج على موضع الجزء المتحرك ويتم وصفه بالتعبير: يتم رسم Uout=f(l i) وفقًا للبيانات التي تم الحصول عليها من التجربة (الشكل 20).
أرز. 20. خاصية إخراج المستشعر.
3.3 الرسم البياني لمعامل المنحدر الناتج
أرز. 21. الاعتماد الرسومي لمعامل الانحدار لخاصية الخرج على حركة المستشعر.
3.4 بناء خاصية الحمل
تعتبر خاصية الحمل ضرورية لتحديد الحدود التي يمكن من خلالها تغيير الحمل بحيث يتغير جهد الخرج للمستشعر بشكل طفيف.
يتم وصف خاصية الحمل بالتعبير: Uout=f(R n) (الشكل 22).
الجدول 2
|
الجهد U BbIX، V |
أرز. 22. خاصية التحميل.
خاتمة: ونتيجة لدراسة معلمات وخصائص حساس الإزاحة الخطية، تم بناء 4 خصائص مختلفة. توضح الرسوم البيانية لهذه الخصائص أن اللاخطية للخاصية تتناقص مع اقتراب قضيب الاستشعار من موضع الصفر. خاصية الخرج ليست خطية ويتم إزاحة الحد الأدنى لها من موضع الصفر للقضيب. يمكن تفسير هذه النتائج من خلال بعض التفاوت في الاقتران الكهرومغناطيسي بين اللفات، والذي قد يكون سببه التوزيع غير المتكافئ لأجزاء ملف العمل فوق ملف المجال ونسبة دورات هذه اللفات تحت القلب.
تظهر خاصية الحمل أنه عندما يتغير الحمل من 2 إلى 10 كيلو أوم، يتغير Uout قليلاً، وهذا التغيير غير خطي، وهو ما يفسره تشبع النواة عندما تتدفق تيارات كبيرة عند حمل أقل.
خاتمة
في مشروع الدورة هذا، تم تصميم جهاز عدم الاتصال باستخدام مثال مستشعر الإزاحة الخطية. يتيح لك مشروع الدورة فهم الميزات واستيعابها بشكل أفضل أجهزة الاستشعار الكهرومغناطيسيةاكتساب مهارات حساب وتصميم مستشعرات المحولات الخطية ودراسة أوضاع تشغيلها. خلال مشروع الدورة، تم إجراء الحسابات الكهرومغناطيسية والحرارية، وتم اختيار المعلمات. تم تحديد اللاخطية للخاصية وحساب معامل الانحدار لخاصية الخرج، وتم بناء خصائص الخرج والحمل.
يلبي التناظري المصمم لمستشعر الإزاحة الخطية جميع المتطلبات المنصوص عليها في المهمة.
مراجع
1. بوجدانوف إي.بي. ورشة عمل معملية في تخصص "الأجهزة الكهربائية غير المتصلة" لطلبة التخصص 18020 - "الأجهزة الكهربائية والإلكترونية" - تومسك: دار النشر TPU، 2003.-58ص.
2. بوجدانوف إي.بي. إرشادات لإكمال مشروع مقرر دراسي في التخصص حول موضوع: "الأجهزة الكهربائية غير التلامسية" لطلبة التخصص 18020 - "الأجهزة الكهربائية والإلكترونية" - تومسك: دار النشر TPU، 2003. - 20 ص.
3. بول ب.ك. أساسيات نظرية الأجهزة الكهربائية. - م.: تخرج من المدرسه, 1970.
4. كوليكوفسكي إل إف، زاريبوف إم إف محولات الإزاحة الاستقرائية ذات المعلمات الموزعة. - م: الطاقة، 1966.
5. ماتالين أ.أ. تكنولوجيا الهندسة الميكانيكية. - ل.: الهندسة الميكانيكية 1985.
6. سافتشينكو إم. جي.، فيليبوف في. آي.، ماريانوف جي. إم. تصميم أجهزة إمدادات الطاقة والقيادة الكهربائية. - م: الطاقة، 1973.
7. تشونيخين أ.أ. الأجهزة الكهربائية. - م: الطاقة الذرية، 1988.
8. الأنظمة والأجهزة الإلكترونية والكهروميكانيكية: السبت. علمي وقائع المجلس الوطني لنواب الشعب "بوليوس"، تومسك، 1997.
تم النشر على موقع Allbest.ru
وثائق مماثلة
تصميم ومبدأ تشغيل أجهزة استشعار الإزاحة بأنواعها المختلفة: السعة، والبصرية، والحثي، والتيار الدوامي، والموجات فوق الصوتية، والمقاومة المغناطيسية، والتضييق المغناطيسي، وقياس الجهد، بناءً على تأثير هول. مجالات استخدام الأجهزة.
الملخص، تمت إضافته في 06/06/2015
تطوير واختيار مخطط وظيفي لمستشعر مقياس التدفق الكهرومغناطيسي. تشكيل والبحث التناظرية، الدائرة الرقمية. حساب مصدر الطاقة للجهاز. الإجراء الخاص بتطوير خوارزمية التشغيل و برمجةمتحكم.
تمت إضافة الدورة التدريبية في 19/08/2012
مشروع قناة قياس بمحول إزاحة - رمز لجهاز استشعار كهروضوئي دوار يوفر التحكم في معلمات حركة الجسم العامل وفقًا لإحداثيات الموضع والسرعة. حساب شبكة بت المحول.
تمت إضافة العمل المخبري في 04/04/2012
تطوير نظام مصمم للتحكم في دوران جهاز الروبوت المتحرك. اختيار وحساب وظيفة النقل للمعالج الدقيق، مكبر الصوت، صمام الملف اللولبي، الاسطوانة الهيدروليكية. حساب الاستشعار تعليقواستقرار النظام.
تمت إضافة الدورة التدريبية في 20/10/2013
مفهوم و الميزات الوظيفيةأجهزة استشعار قياس الجهد وأنواعها وخصائصها المميزة والغرض ومبدأ التشغيل. الخصائص الثابتة والديناميكية لمستشعر قياس الجهد الخطي والعكس والوظيفي.
تمت إضافة العرض في 24/12/2011
وصف الخصائص التقنية ومبدأ التشغيل لمستشعر التسارع الخطي. تبرير الرسم الفني. حساب المعلمات الثابتة والديناميكية للجهاز وأجهزة استشعار الإزاحة. تحليل مصادر الأخطاء و الطرق الممكنةتخفيضهم.
تمت إضافة الاختبار في 21/05/2013
تصنيف الظواهر الفيزيائية والتأثيرات المستخدمة في تصميم الأجهزة للحصول على معلومات القياس الأولية. أنواع العناصر المرنة. حساب العنصر الحساس لمستشعر الضغط ومحول القياس الأساسي.
تمت إضافة الدورة التدريبية في 16/04/2012
الغرض ومبدأ تشغيل مقاييس الجهد. اعتماد جهد الخرج على حركة المنزلق. الدائرة الكهربائية لجهاز استشعار الجهد. الخصائص الثابتة لمقاييس الجهد المحملة. أنواع عكسية وغير قابلة للعكس من إدراجها.
تمت إضافة العرض بتاريخ 10/05/2016
أساسي المواصفات الفنيةالأنظمة التنظيمية. اختيار المعالج الدقيق، القابض الآلي، المحرك الهيدروليكي، علبة التروس، المحرك، مستشعر الضغط والحركة الخطية، مكبر الصوت التشغيلي. تحديد استقرار النظام المنفصل.
تمت إضافة الدورة التدريبية في 20/10/2013
التسلسل والمنهجية لتطوير أجهزة استشعار المسافة واللمس. مبدأ تشغيل أجهزة الاستشعار التي تم التحقق منها والأدوات القياسية (الميكرومتر أو مؤشر الاتصال ICH-25). يتم التحقق من نسبة قراءات المستشعر. معالجة نتائج القياس.
أجهزة استشعار الحركة الخطية لها عدة مستويات تصنيف، ولكن المستوى الرئيسي هو مبدأ التشغيل، الذي يحدد الغرض الوظيفي ونطاق استخدام الأجهزة.
وفقًا لمبدأ التشغيل، يمكن تقسيم أجهزة التحكم وقياس الإزاحة إلى:
- بالسعة.
- البصرية (الكتروضوئية).
- تعريفي.
- أجهزة استشعار من النوع المغنطيسي.
- بالموجات فوق الصوتية.
- مقاوم ، مقاوم مغناطيسي وقياس الجهد.
- الأجهزة التي تستخدم تأثير Hall في عملها لا تُستخدم عمليًا في الحياة اليومية.
في المنزل أنظمة الأمنوأجهزة التحكم في الوصول والحركة، يتم استخدام المجموعات الأربع الأولى من أجهزة الاستشعار في الغالب.
مجال تطبيق أجهزة الاستشعار
تم تصميم أي مستشعر للحركة، بغض النظر عن مبدأ التشغيل، لتحويل الحركة الخطية إلى حركة رقمية أو إشارة تناظرية، والتي تنتقل بعد ذلك إلى وحدة القياس أو التشغيل الإلكترونية. تعتمد دقة القياس على مبدأ التشغيل.
في كثير من الأحيان ليست هناك حاجة لقياس كمية معينة من الحركة.على سبيل المثال، في أنظمة الأمان، من السهل جدًا تحديد وجود حركة في منطقة التحكم. تسمى هذه الأجهزة بأجهزة استشعار الحركة. ولا يشترط أن تكون لديهم دقة عالية في قياس القيم. ولذلك، فإن الأجهزة السعوية أو البصرية أو الحثية الرخيصة هي الأكثر شيوعًا هنا.
في أنظمة التحكم الآلي للإنتاج الصناعي، هناك حاجة إلى قياسات الإزاحة.

علاوة على ذلك، يجب إجراء القياس (على سبيل المثال، في الأجهزة ذات التحكم العددي) بدقة عالية ويتم إجراؤه بشكل مستمر أو منفصل - على فترات زمنية معينة. في هذه الحالة، يتم استخدام أجهزة التضيق المغناطيسي على نطاق واسع.
أجهزة الاستشعار بالسعة أبسط مستشعر سعوي في تصميمه يشبه المكثف.
- عندما يتحرك الكائن الذي يتم التحكم فيه، يمكن أن تتغير قدرته من خلال:
- التغييرات في الفجوة بين اللوحات.
- التغييرات في الموضع النسبي للصفائح، ونتيجة لذلك، زيادة (نقصان) في مساحة التداخل المتبادل. التغييراتثابت العزل الكهربائي
طبقة عازلة. عندما تتغير سعة الجهاز، يمكن لهذه القيمة في حد ذاتها أن تكون بمثابة إشارة مرسلة إليهالوحدات الإلكترونية

التحكم، وقد يشتمل على مولد نبض، وهو قابل للمعالجة الإضافية بسهولة أكبر.
- أجهزة التحكم في الحركة السعوية الأكثر انتشارًا هي:
- كمصدر إشارة في أنظمة مراقبة تعبئة الخزانات بالمنتجات السائلة أو المسحوقية.
- كجهاز يتحكم في بداية ونهاية شوط عمل الهيئة التنفيذية للأنظمة الروبوتية والآلات والخطوط الأوتوماتيكية.
- لتحديد المواقع الكائنات المختلفة.
- مثل مفتاح القرب العادي. في أنظمة التحكم وإنذار ضد السرقة
باعتباره "جهاز استشعار الوجود".
نظرًا لانخفاض تكلفتها وموثوقيتها، تُستخدم الأجهزة السعوية على نطاق واسع في الأنظمة الفردية لمجمع دعم الحياة المنزلي الذكي.
- تشمل مزاياها مقارنة بالأجهزة التي تستخدم مبدأ تشغيل مختلفًا ما يلي:
- تكنولوجيا الإنتاج الضخم المبسطة، باستخدام مواد غير مكلفة ومتوفرة على نطاق واسع.
- حساسية عالية مع استهلاك منخفض للطاقة.
- حجم صغير ووزن منخفض.
- المتانة والبساطة وموثوقية التشغيل.
العوامل الرئيسية التي تحد من الاستخدام الواسع النطاق في أنظمة التحكم عالية الدقة هي:
- عامل تحويل منخفض نسبيًا.
- الحاجة إلى التدريع الدقيق لعناصر الاستشعار.
- تحسين دقة الجهاز عند الترددات الأعلى مقارنة بالتردد الصناعي 50.0 هرتز.
- احتمالية عالية لإنذارات كاذبة عند تغير الظروف الجوية (الثلج، المطر)، الأمر الذي يتطلب حماية متزايدة لمصدر الإشارة.
أجهزة الاستشعار الحثية
إشارة في أجهزة الاستشعار الحثيةيتم تشكيلها عن طريق تغيير محاثة الملف. وتتميز الأجهزة من هذا النوع بالدقة العالية، وبأبعاد صغيرة. أجهزة المراقبة التعريفية قادرة على أخذ القياسات عن بعد، وتنقسم حسب النوع إلى بسيطة وتفاضلية.
أحد تصميمات هذه الأجهزة عبارة عن محول، جوهره لديه القدرة على الحركة.
عندما يتحرك القلب، تتغير محاثة الملف وهذا التغيير هو إشارة. تتغير قيمة الحث بشكل متناسب مع مستوى الحركة الأساسية.إذا تم التحكم في الحركة فيما يتعلق بالأشياء ذات المغناطيسية الحديدية، فلن تكون هناك حاجة إلى نواة.
الجزء الذي يقع في مجال الإشعاع الكهرومغناطيسي للملف يغير محاثته ويولد إشارة تحكم. تُستخدم مستشعرات التحكم من النوع التعريفي على نطاق واسع في الأجهزة التي يتم التحكم فيها بواسطة الكمبيوتر، وأنظمة الأمان غير التلامسية، ولقياس الحركة الفعلية، مع تقرير بقيمتها وفقًا لـمقياس رقمي
أو مع المعلومات المعروضة على شاشة عرض الكريستال السائل.
أجهزة التحكم في الحركة البصرية والضوئية
تُستخدم أجهزة المثلثات الضوئية، وهي في الأساس أداة تحديد المدى الضوئية التقليدية (الليزر)، على نطاق واسع لمراقبة الحركة وقياس المسافات. ولرصد التغيرات الصغيرة في الكميات الخطية، يتم استخدام أجهزة ذات شبكة استقطابية. بالإضافة إلى ذلك، تُستخدم أجهزة الاستشعار الضوئية على نطاق واسع في أنظمة الأمان باعتبارها "حاجزًا شعاعيًا".
- تشمل مزايا هذه الفئة من الأجهزة ما يلي:
- تنفيذ التحكم اللاتلامسي.
- دقة عالية.
توليد إشارة تحكم بشكل فوري تقريبًا (لا يوجد وقت تأخير للاستجابة).
- عيوب أجهزة الاستشعار البصرية عالية الدقة هي:
- تكلفة كبيرة. الحرجة للظروف.
بيئة
أكبر شركة روسية لتصنيع أجهزة مراقبة الحركات هي شركة "ELTECH" (سانت بطرسبرغ)، المتخصصة في أجهزة مراقبة وقياس حجم الحركة الخطية للأنواع الاستقرائية والمقاومة والسعوية.
توفر مقاييس الجهد الخطية لخطوط طراز Longfellow-2 وDuraStar قياس الإزاحة ضمن نطاق يصل إلى 610.0 ملم وبدقة تبلغ 0.5%.

تعتمد تكلفة الأجهزة على النطاق المقاس (الطراز) وحجم التسليم ويتم تحديدها عند الطلب.
في الآونة الأخيرة، أصبحت الأدوات الصينية الصنع غير المكلفة ولكنها دقيقة إلى حد ما تحظى بشعبية كبيرة.
- النماذج الأكثر شيوعًا هي:"سلسلة DEPP EP15"
- - الأجهزة الحثية المستخدمة في الأدوات الآلية وأنظمة التحكم الآلي؛جهاز بصري "سلسلة HENGXIA K100"
- يسمح لك بالتحكم في الأبعاد في حدود 50.0...7200.0 ملم؛التشفير الخطي "Roundss Rlc50d"
في جوهره، إنه شريط قياس إلكتروني يسمح لك بقياس الأبعاد بدقة عالية والتحكم في المسافة المقطوعة.
تعتمد تكلفة المنتجات الصينية على سعر صرف الروبل ويتم تحديدها عند الطلب.
جهاز التحكم في الحركة DIYيكاد يكون من المستحيل صنع جهاز لقياس مقدار الحركة بنفسك.
ومع ذلك، غالبا ما يقوم هواة الراديو بتجميع أجهزة استشعار الحركة من المعدات الراديوية والإلكترونية المكسورة، والتي يتم استخدامها بنجاح في أنظمة الأمن ودعم الحياة.
على سبيل المثال، يمكن استخدام جهاز استشعار لتشغيل الضوء في المرحاض عندما يدخل الشخص الحمام. لا تقل شعبية الأجهزة المماثلة لتشغيل وإيقاف الإضاءة في المناطق السكنية. وبالطبع لا غنى عن هذه الأجهزة عند إنشاء نظام الأمان الخاص بك، حيث تسجل أي محاولة (سواء كانت شخصًا أو حيوانًا) للدخول غير المصرح به إلى أراضي الكائن المحمي (قطعة أرض حديقة ، شرفة، مرآب). دعونا نلقي نظرة على صنع مستشعر حركة محلي الصنع باستخدام مثال التجميعجهاز إلكتروني ضوئي
، التحكم في عبور المحيط المحمي.
- الأجزاء اللازمة لصنع الجهاز نفسه هي: مصدر الطاقة منالهاتف المحمول
- مع جهد دخل 5.0 فولت.
- الخلية الكهروضوئية أفضل من المقاومة الضوئية.
- ترانزستور ثنائي القطب مع وصلة "pnp".
- مقياس جهد البناء (المقاومة) مع نطاق ضبط 0...10.0 كيلو أوم.
- يعد مؤشر الليزر الذي ينتج شعاعًا رفيعًا وموجهًا بشكل ضيق مثاليًا كمصدر للإشعاع.
ترتيب توصيل الدائرة هو كما يلي:
- يتم لحام كاثود الخلية الكهروضوئية بالموصل الإيجابي لمصدر الطاقة - وستكون هذه النقطة هي الموصل (الكتلة) المشترك.
- يتم توصيل مقياس الجهد العامي بأنود الخلية الكهروضوئية عندما يتم نقل محركها إلى الموضع الأوسط.
- يتم لحام الاتصال الحر لمقياس الجهد بالموصل السلبي لمصدر الطاقة، والاتصال من شريط التمرير الخاص به إلى قاعدة الترانزستور.
- يتم تشغيل باعث الترانزستور وتوصيله بـ "زائد" الدائرة المشتركة ، ويتم توصيل المجمع بأحد جهات اتصال التتابع.
- يتم لحام جهة اتصال التتابع الثانية بالسلك السالب لمصدر الطاقة.
عند إضاءة نافذة الخلية الكهروضوئية بمؤشر ليزر، فإن تدوير شريط تمرير مقياس الجهد يضمن التشغيل الموثوق للمرحل. يمكنك توصيل أي مصدر إشارة بجهات اتصال تبديل التتابع - العواء، المصباح المتوهج،مؤشر LED . عيبمن هذا الجهاز
هو أنه يشتعل فقط عندما يتقاطع شعاع الضوء.
وهذا يعني أن جميع عناصره تعمل في وضع الاستعداد. من خلال طرق مختلفة لتبديل جهات اتصال التتابع، من الممكن تشغيل الضوء في المرة الأولى التي يعبر فيها الشعاع وإيقاف تشغيله في المرة الثانية. تُستخدم مستشعرات Hall المتكاملة في العديد من مجالات الصناعة الحديثة، على سبيل المثال في الهندسة الميكانيكية، وإلكترونيات السيارات،تكنولوجيا الطيران
. على عكس المستشعرات الميكانيكية والبصرية، تتمتع مستشعرات Hall بميزة مهمة - فهي غير حساسة عمليًا للتأثيرات الميكانيكية والتغيرات في المعلمات البيئية، مع تقليل تكلفة الحل النهائي.
مقدمة
الهيكل والخصائص الرئيسية لأجهزة استشعار القاعة الخطية
عادةً ما يتم تحسين مستشعرات القاعة الخطية (HLS) لقياس حجم المجال المغناطيسي أحادي القطب أو ثنائي القطب. تتميز أقل البلدان نمواً بمعلمتين رئيسيتين - الحساسية والخطية في نطاق درجة حرارة تشغيل معين.
يظهر في الشكل خاصية النقل النموذجية لأقل البلدان نمواً (اعتماد جهد الخرج على سعة المجال المغناطيسي). 1. تحتوي معظم أجهزة الاستشعار ذات الإمداد الفردي على جهد خرج صفر (يقابل صفر قوة المجال المغناطيسي) يساوي نصف نطاق جهد الخرج أو نصف جهد الإمداد. في الحالة الأخيرة، يعتمد حجم الجهد الصفري والحساسية على حجم جهد الإمداد. ويلاحظ هذا في أجهزة الاستشعار ذات الإخراج النسبي، والتي هي عنصر قاعة مع مكبر للصوت الخطي (الشكل 2). وبالتالي، بالنسبة لمستشعر A3515 الشهير، بجهد إمداد +5.0 فولت، يكون الجهد الصفري والحساسية 2.5 فولت و5.0 مللي فولت/جاوس، على التوالي، وعندما يتم زيادة مصدر الطاقة إلى 5.5 فولت، تتغير هذه المعلمات إلى القيم من 2.75 فولت و 5.5 مللي فولت/جاوس. ولهذا السبب، عند استخدام هذا النوع من LDC، من الضروري وضع متطلبات أكثر صرامة على مصدر الطاقة. وفي الوقت نفسه، تسمح المستشعرات بإجراء تعديلات بسيطة على الحساسية دون الحاجة إلى مكونات تضخيم إضافية، وهو ما قد يكون مفيدًا جدًا.

أقل البلدان نمواً الحديثة عبارة عن دائرة متكاملة متجانسة، حيث يتم دمج عنصر القاعة ومكبر الصوت الخطي ومرحلة تضخيم الطاقة النهائية من الفئة A على شريحة واحدة (الشكل 3). بالإضافة إلى ذلك، لزيادة دقة التحويل وضمان استقرار درجة الحرارة، تطبق الشريحة نظام تصحيح جهد التحيز التلقائي وتصفية الإشارة بعد مكبر الصوت الخطي.


يوضح الجدول 1 نطاق أجهزة استشعار Hall الخطية الجديدة من Allegro Microsystems. تحتوي المستشعرات A1301 و A1302 على الدائرة الموضحة في الشكل. 3. أنها توفر دقة منخفضة ويمكن استخدامها، على سبيل المثال، في أنظمة تسجيل الحركات الزاوية أو الخطية للأشياء. يمكن أن تتأثر دقة واستقرار خصائص أقل البلدان نمواً مع عنصر Hall واحد بعدة عوامل: اختلال تدرجات المقاومة اعتمادًا على اتجاه التيار، وعدم التجانس الهندسي، وتأثيرات مقاومة الضغط، وحتى التأثيرات الميكانيكية الخارجية على جسم الدائرة الدقيقة. وللتخلص من تأثير هذه العوامل على دقة أقل البلدان نمواً، يتم استخدام نظام تعويض إزاحة التربيع الديناميكي. تم توضيح مبدأ عملها في الشكل. 4. يتم تبديل تيارات عناصر القاعة من اتجاهين (0 درجة و 90 درجة) بالتناوب بتردد حوالي 200 كيلو هرتز إلى مدخلات مكبر الصوت التفاضلي، مما يؤدي إلى "دوران إلكتروني" للعنصر بمقدار 90 درجة. في الوقت نفسه، في لحظة "الدوران"، تعمل دائرة الاحتفاظ بالعينة على إصلاح الجهد عند خرج مكبر الصوت، مما يزيل ضوضاء التبديل. يتم تمرير الإشارة أخيرًا عبر مرشح الترددات المنخفضة للاستعادة الكاملة. تتيح دوائر تعويض التربيع الديناميكي إمكانية القضاء بشكل كامل تقريبًا على تأثير عوامل زعزعة الاستقرار الخارجية، فضلاً عن تحقيق استقرار عالٍ لجهد تحيز الخرج. تشمل عيوب الدائرة وجود ضوضاء في طيف إشارة الخرج في نطاق تردد التبديل F com، مما يحد من الحد الأقصى لتردد إشارة خرج المستشعر بقيمة تساوي عادة 0.1-0.2 F com.

يتم استخدام المبدأ الموصوف لتعويض الإزاحة في أجهزة الاستشعار A1321-A1323 (الشكل 5). تنتمي هذه المنتجات إلى فئة أقل البلدان نمواً ذات المعايرة الدقيقة وتحافظ على دقة عالية وخطية للتحويل في نطاق درجات الحرارة من -40 إلى +150 درجة مئوية. ومع ذلك، كما هو مذكور أعلاه، تؤدي دوائر تعويض الإزاحة الديناميكية إلى زيادة الضوضاء عند خرج المستشعر. لذلك ، إذا كانت سعة ضوضاء الخرج في نطاق 10 كيلو هرتز بالنسبة لأجهزة الاستشعار الخطية A1301 و A1302 لا تتجاوز 150 ميكروفولت ، فإن هذه القيمة بالنسبة إلى A1321-A1323 أعلى بالفعل بأمرين من حيث الحجم - حوالي 25 مللي فولت. وفقًا لذلك، مع نفس معامل التحويل البالغ 2.5 مللي فولت/جاوس، فإن دقة الحد الأدنى لقيمة المجال المغناطيسي المسجل لـ A1301 هي 0.06 غاوس، وبالنسبة لـ A1323 فهي 10 غاوس.

إن استخدام تنظيم جهد الإمداد لتوسيع نطاق تحويل أقل البلدان نمواً يقدم عددًا من تحديات التصميم. أولا، تتزايد بشكل حاد متطلبات استقرار الجهد الكهربائي. ثانيًا، يقوم تموج وضوضاء جهد الإمداد بتعديل إشارة خرج المستشعر بشكل مباشر، مما يؤثر على دقة القياس، الأمر الذي يتطلب استخدام ترشيح معقد، وبالتالي يجعل الدائرة أكثر تكلفة بكثير. أجهزة الاستشعار A1391 و A1392 من الجيل الجديد خالية من مثل هذه العيوب (الشكل 6). تحتوي هذه الدوائر الدقيقة على مدخل منفصل لقياس الجهد المرجعي VREF، والذي يمكنك من خلاله ضبط أي قيمة لمستوى الصفر وعامل التحويل. في هذه الحالة، توفر الدائرة عمقًا لقمع الضوضاء استنادًا إلى جهد الإمداد بحوالي 60 ديسيبل. يشبه تثبيت الانحياز A1321-A1323، ولكن يتم تقليل سعة الضوضاء بنسبة 20%.

تنفذ المستشعرات A1391 وA1392 وضع إيقاف التشغيل الإلكتروني عبر إدخال SLEEP. عند تطبيق صفر منطقي على هذا الإدخال، تنتقل الدائرة الدقيقة إلى وضع الطاقة المنخفضة (أقل من 25 ميكرو أمبير)، وينتقل خرج المستشعر إلى الحالة الثالثة بمقاومة عالية. يتيح لك ذلك الجمع بين مجموعات من أجهزة الاستشعار بالتوازي عبر المخرجات واستخدام ADC واحد بدون معدد إرسال مدمج (الشكل 7). يمكن إجراء استقصاء المستشعر بواسطة معالج دقيق خارجي عن طريق إصدار إشارة منطقية واحدة لمدخل SLEEP الخاص بالدائرة الدقيقة المقابلة.

تطبيق LDH
من بين مجالات تطبيق أجهزة استشعار هول الخطية، ينبغي تسليط الضوء على اثنين من المجالات الأكثر شيوعا. هذه هي أجهزة لقياس وقياس الإزاحة الخطية أو الزاوية التيار الكهربائي.
قياس الحركة الخطية أو الزاوية
في معظم التطبيقات، تُستخدم أقل البلدان نمواً جنبًا إلى جنب مع المغناطيس الدائم لقياس حركة الأجسام. ويرجع ذلك إلى حقيقة أنه من أجل الحفاظ على الحد الأقصى من الخطية، من الضروري ضمان حدوث تغيير كبير في المجال المغناطيسي عندما تتغير المسافة بين أقل البلدان نمواً والنقطة المرجعية على الجسم المتحرك. يجب اختيار مغناطيس دائم يتمتع بأعلى شدة مجال ممكنة، على سبيل المثال SaCo أو AlNiCo.
هناك عدة خيارات للموضع النسبي للمغناطيس الدائم وأقل البلدان نموًا في أنظمة قياس حركات الأجسام. أبسط طريقة هي الترتيب الخطي للمغناطيس الأقل تقدمًا والمغناطيس على نفس المحور بحيث تتقاطع خطوط المجال المغناطيسي مع المستشعر بزاوية 90 درجة. مع هذا الترتيب، هناك علاقة غير خطية للغاية بين جهد الخرج للـ LDC والمسافة بينه وبين المغناطيس (الشكل 8). بالنسبة للحركات الصغيرة نسبيًا، يكون الانحراف عن الخطية صغيرًا وليس هناك حاجة للجوء إلى خطية إضافية. خلاف ذلك، فمن الضروري استخدام دائرة إضافية لخطية خاصية مسافة الجهد.

الخيار الثاني هو موقع LDH والمغناطيس طائرات متوازية. مع هذا الاتجاه، يحتوي النظام على نقطة مجال صفرية، مما يجعل من الممكن الحصول على معلومات إضافية حول اتجاه الحركة وفقًا لإشارة جهد الخرج (على سبيل المثال، إلى اليمين - زيادة في الجهد، إلى اليسار - انخفاض (الشكل 9)). كما يتبين من الشكل. 9، تتمتع المنطقة المركزية بالنسبة لنقطة الإزاحة الصفرية بخطية عالية، والتي يمكن استخدامها بنجاح في تطبيقات مثل مقاييس الجهد، ومصححات الهواء (الصمامات الهوائية)، وأجهزة استشعار موضع الخانق، وما إلى ذلك. بالمناسبة، في هذا التجسيد، بسبب تغييرات كبيرة في السعة في شدة المجال المغناطيسي بالقرب من نقطة الصفر، فإن جهد الخرج لأقل البلدان نموًا له أيضًا نطاق كبير، مما يبسط معالجة الإشارات اللاحقة.

الخيار الثالث هو تحديد موقع أقل البلدان نمواً بين مغناطيسين متكاملين (الشكل 10). توفر الحقول التكميلية للنظام ثنائي المغناطيس خطية جيدة مع خصائص انحدار عالية. يحتوي هذا النظام أيضًا على نقطة حركة صفرية، مما يتيح معلومات حول اتجاه الحركة. عيب الخيار الموصوف هو النطاق الصغير إلى حد ما للحركات في مثل هذا النظام، مما يحد من نطاق تطبيقه.

تتطلب معظم الخيارات المدروسة بدرجة أو بأخرى خطية اعتماد إشارة الخرج على المسافة. يمكن تنفيذ ذلك باستخدام ADC ووحدة تحكم دقيقة إذا كان الجهاز الذي يتم تطويره يوفر التحكم الرقمي اللاحق. إذا كانت النتيجة إشارة تناظرية خطية مع المسافة، فيمكن تنفيذ عملية الخطية بسهولة باستخدام دائرة متكاملة تناظرية قابلة للبرمجة (PAIC). في هذه الحالة يكفي إزالة الاعتماد التجريبي لوظيفة التحويل مرة واحدة وإدخاله في شكل جدول معاملات في بيئة التطوير. بالإضافة إلى الخطية، يمكن تنفيذ PAIS، إذا لزم الأمر معالجة إضافيةإشارة (التضخيم، والتصفية، والكشف الصفري، وما إلى ذلك).
قياس التيار الكهربائي
موجود عدد كبيرطرق لقياس التيار، لكن ثلاثة منها فقط وجدت استخدامًا واسع النطاق في إنتاج المنتجات بكميات كبيرة. هذه هي طريقة المقاومة وأجهزة استشعار المحولات وأجهزة استشعار تيار تأثير هول. تعتبر طريقة المقاومة هي الأبسط والأكثر اقتصادا، ولكن لها عيوب كبيرة، بما في ذلك فقدان الطاقة الكبير عبر المقاوم وعدم وجود عزل كلفاني لدوائر القياس والقياس. بالإضافة إلى ذلك، تتمتع المقاومات السلكية بمحاثة كبيرة، مما لا يسمح باستخدامها في دوائر قياس التيارات النبضية والتيارات الترددية. إن استخدام مقاومات الأغشية السميكة القوية غير الحثية يقلل من التأثير الاقتصادي لهذه الطريقة إلى الصفر. يعد استخدام محولات التيار حلاً أكثر تكلفة بكثير، كما أنه ممكن فقط عند قياس التيار المتردد عبر نطاق تردد محدود.
تحتل أجهزة استشعار تيار تأثير هول موقعًا متوسطًا في السعر بين الأنواع التي تمت مناقشتها أعلاه. مزاياها الرئيسية هي عدم وجود خسائر التوصيل والقدرة على قياس كل من التيار المباشر والمتناوب. بالإضافة إلى ذلك، يتم عزل عنصر Hall عن الدائرة الحالية، مما يوفر عزلًا كلفانيًا تلقائيًا. ضرورة مصدر طاقة خارجيلا يمكن وصفه بأنه عيب كبير، لأنه في الغالبية العظمى من الحالات لا يكون المستشعر جهازًا طرفيًا وبعده لا تزال هناك مكونات دائرة أخرى تتطلب أيضًا مصدر طاقة.
نظرًا لأن نطاق قيم تحريض المجال المغناطيسي المقاس بواسطة LDH محدود، فمن الضروري عند اختيار التصميم تحديد تكوين الدائرة المغناطيسية للمستشعر بشكل صحيح. ويجب أن تتوافق شدة المجال المتولدة عن المصدر الحالي مع نطاق قياس أقل البلدان نمواً.
عند قياس التيار من عدة عشرات إلى آلاف الأمبيرات، يمكن وضع مستشعر Hall بالقرب من الموصل، دون استخدام دائرة مغناطيسية إضافية. ل الأنواع الموجودةأجهزة الاستشعار، يمكن اعتبار القيمة المثلى لتحريض المجال المغناطيسي حوالي 100 غاوس في منتصف نطاق القياس. سيضمن ذلك حساسية مقبولة للمستشعر من حيث مستوى ضوضاء الخرج. يمكن تقدير تحريض المجال المغناطيسي الناتج عن موصل يحمل تيارًا باستخدام الصيغة المعروفة (في نظام SI):
حيث r هي المسافة بين مراكز الموصل ورقاقة مستشعر Hall (الشكل 11). عند اختيار موضع LDH بالنسبة للموصل، من الضروري أن نأخذ في الاعتبار أن أكبر قدر من الحساسية يتحقق عندما تتقاطع خطوط المجال المغناطيسي مع مستوى المستشعر بزاوية قائمة. من عيوب هذه الطريقة أن أي مصدر خارجي للمجال المغناطيسي سيؤثر على قراءات المستشعر الحالي.

يزيد من الحساسية ويقلل من المؤثرات الخارجية النواة المغناطيسية الحلقيةمع وجود فجوة يتم فيها تركيب دائرة LDH دقيقة معايرة من النوع A1321 – A1323 (الشكل 12). في هذه الحالة، يتركز الحقل بأكمله في الفجوة ولا يوجد أي تأثير خارجي عملياً. يمكن تقدير الحث في الفجوة بالعلاقة:

يتم تطبيق المبدأ الموصوف للقياس الحالي في أجهزة الاستشعار المعيارية من Allegro Microsystems من عائلة ACS (الشكل 13، الجدول 2).


التصميم الموضح في الشكل. 12، لا يسمح بقياس القيم الحالية الصغيرة. ويرجع ذلك إلى محدودية حساسية أقل البلدان نمواً من حيث ضوضاء الخرج. وبالتالي، عند استخدام الدائرة الدقيقة A1323، فإن دقة الحث المغناطيسي، المحدودة بالضوضاء في النطاق 10 كيلو هرتز، تبلغ 10 غاوس، أو حوالي 1.5 أمبير. هناك خياران: إما استخدام LDC مع مضخم خطي غير معوض، أو استخدام مضخم صوت متعدد -تصميم الدوران (الشكل 14). في الحالة الأولى، كما هو موضح أعلاه، ستزداد الحساسية إلى 0.06 غاوس، أو حوالي 10 مللي أمبير. لتحقيق مثل هذه الحساسية في تصميم متعدد المنعطفات، سيكون من الضروري لف أكثر من 150 دورة، مما يؤدي إلى زيادة حادة في الحث وقد يكون غير مقبول. ولذلك في كل حالة محددةهناك مفاضلة بين دقة المستشعر وعرض النطاق الترددي. على سبيل المثال، تحديد نطاق التردد باستخدام مرشح تمرير منخفض RC بسيط عند مخرج LDH A1323 إلى 1 كيلو هرتز سيؤدي إلى زيادة الدقة إلى 0.1 أمبير.

خاتمة
لقد قمنا بفحص التطبيقين الأكثر شيوعًا لأقل البلدان نمواً، مما يجعل من الممكن تبسيط حل مجموعة واسعة من المشكلات بشكل كبير عند تصميم المعدات لأنظمة التحكم الآلي وإمدادات الطاقة وتكنولوجيا المحولات. نأمل أن تكون هذه المادة مفيدة للمطورين عند اختيار حل تقني معين.
الأدب
- سلسلة من المقالات المخصصة للدوائر المتكاملة التناظرية القابلة للبرمجة Anadigm // المكونات والتقنيات. 2005. رقم 1-9.