Numirea unui motor electric asincron. Motoare asincrone
Motoarele asincrone sunt numite motoare în care viteza rotorului este în urmă față de viteza câmpului magnetic al statorului atunci când un curent trifazat trece prin înfășurările sale.
Când un curent trifazat trece prin înfășurările statorului unei mașini trifazate, apare un câmp magnetic rotativ, sub influența căruia un electricitate. Ca urmare a interacţiunii rotaţiei camp magnetic stator cu curenți induși în conductoarele rotorului, ia naștere o forță mecanică care acționează asupra conductorului cu curent, care creează un cuplu care pune rotorul în mișcare. În același timp, viteza rotorului a unui motor asincron este întotdeauna mai mică decât viteza câmpului magnetic rotativ al statorului din cauza alunecării rotorului, care pentru motoarele moderne este de aproximativ 2-5%.
Astfel, un motor cu inducție primește energie furnizată rotorului printr-un flux magnetic rotativ (inductiv), spre deosebire de motoarele curent continuu, în care energia este furnizată prin fire. Motoare asincrone spre deosebire de sincrone, acestea sunt excitate de curent alternativ.
Un motor asincron, ca un motor sincron, este format din două părți principale: un stator cu înfășurări de fază prin care trece un curent alternativ trifazat și un rotor, a cărui axă este așezată în rulmenți. Rotorul poate fi scurtcircuitat și fază (Fig. 170).
Rotor cu colivie (Fig. 170, în) reprezinta un cilindru de-a lungul circumferintei caruia conductoare sunt situate paralel cu axa sa, inchise intre ele pe ambele parti ale rotorului prin inele (sub forma unei roti de veverita).
Un motor asincron cu un astfel de rotor se numește motor cu veveriță. Dezavantajele sale includ: cuplu scăzut de pornire și curent ridicat în înfășurările statorului în timpul pornirii. Dacă doresc să mărească cuplul de pornire sau să reducă curentul de pornire, folosesc motoare asincrone cu rotor de fază (Fig. 170, G). Aceste motoare au aceeași înfășurare pe rotor ca și pe stator. În acest caz, capetele înfășurărilor sunt conectate la inele colectoare (Fig. 170, e) situat pe arborele motorului. Inelele de contact sunt conectate la reostatul de pornire folosind perii.
Pentru a porni motorul, în circuitul de alimentare este inclus un stator, după care rezistența reostatului de pornire este îndepărtată treptat din circuitul rotorului. Când motorul este pornit, inelele de contact sunt scurtcircuitate de contactele demarorului,
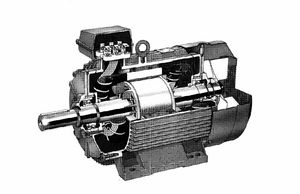
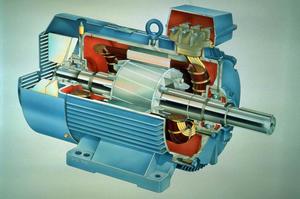
Tăiere pe lungime motor asincron cu rotor de fază
Pe fig. 171 prezintă o secţiune longitudinală a unui motor cu inducţie cu un rotor de fază. In caz 6 înfășurarea statorului 5 este plasată, așezată în caneluri 4 oțel pentru stator. în caneluri 2 rotorul de oțel se înfășoară 3 rotor.
Pornirea motorului cu rotor cu colivie poate fi efectuată prin pornirea directă a demarorului la maxim tensiune de operare circuite (metoda de pornire directă). Cu toate acestea, datorită creșterii accentuate a e. d.s. și curent de pornire tensiunea din țintă la momentul de pornire scade, ceea ce afectează negativ funcționarea motorului de antrenare și a altor consumatori alimentați de acest circuit.
În cazul unui curent de pornire mare, pentru a-l reduce, motoarele asincrone cu rotor în cușcă veveriță sunt de obicei pornite în două moduri: prin comutarea înfășurărilor statorului în momentul pornirii de la o stea la un triunghi, dacă înfășurările statorului sunt conectat în deltă în timpul funcționării normale a motorului electric, sau prin pornirea motorului electric printr-un reostat de pornire (sau autotransformator) în circuitele statorice.
Motorul este oprit prin oprirea contactorului. După ce motorul se oprește, reostatul de pornire sau autotransformatorul este complet cuplat. Viteza de rotație a motoarelor asincrone este reglată prin modificarea rezistenței reostatului inclus în circuitul rotorului (pentru motoarele electrice cu rotor de fază) și comutarea înfășurărilor statorului pentru a modifica numărul de perechi de poli (pentru motoarele electrice cu veveriță). -rotor cușcă).
Inversarea sensului de rotație a motoarelor cu inducție se realizează prin schimbarea direcției câmpului magnetic rotativ al statorului prin comutarea oricăror două dintre cele trei faze ale înfășurării statorului (folosind fire care conectează clemele înfășurării statorului la circuit) utilizând un bipolar convențional. intrerupator.
Motoarele asincrone au un design simplu, au dimensiuni și greutate mai mici în comparație cu motoarele de curent continuu, drept urmare sunt mult mai ieftine. În plus, sunt mai fiabile în funcționare, necesită mai puțină atenție în timpul întreținerii din cauza absenței unui colector rotativ și a unui aparat cu perie; au o eficienta mai mare, echipamentul lor de control este mult mai simplu si mai ieftin decat cel al motoarelor de curent continuu. Motoarele asincrone funcționează fără scântei, ceea ce este posibil la mașinile de curent continuu cu comutare întreruptă, astfel încât sunt mai sigure în ceea ce privește focul.
Principalele avantaje enumerate ale motoarelor asincrone explică tendință modernă introducere pe scară largă curent alternativ pe nave maritime. Trebuie remarcat faptul că în industrie, motoarele asincrone au câștigat de multă vreme o poziție dominantă în comparație cu alte tipuri de motoare electrice.
Motoarele asincrone sunt construite cu putere de la fracțiuni de kilowatt la multe mii de kilowați. Pe nave marina Se folosesc în principal motoare asincrone cu colivie, care sunt disponibile în versiuni impermeabile și rezistente la stropire și sunt evaluate la 380/220 V.
1. Care este principiul generatorului DC?
2. Care sunt principalele părți ale unei mașini electrice de curent continuu și care este scopul lor?
3. Cum sunt împărțite mașinile DC după design?
4. Care este principiul de funcționare al motorului DC?
5. Care sunt regulile de bază ale serviciului mașini electrice curent continuu?
6. Ce mașini se numesc sincrone și care este principiul funcționării lor?
7. Pentru ce sunt transformatoarele, care sunt proiectarea și principiul lor de funcționare?
8. Ce motoare se numesc asincrone și care este principiul funcționării lor?
9. Cum sunt împărțite motoarele asincrone în funcție de designul rotorului?
Cel mai popular dintre motoarele electrice existente este încă motorul asincron, creat în secolul al XIX-lea. Designul său s-a dovedit a fi ingenios de simplu și atât de reușit încât toate transformările ulterioare nu au vizat principiul funcționării, afectând doar tehnologia de fabricație a anumitor piese. De exemplu, rulmenții pe care era atașat arborele motorului puteau fi modificați, forma înfășurărilor rotorului și statorului s-a schimbat, dar principiul de funcționare al unui motor asincron a rămas același.
Indiferent de dimensiunile acestui tip de motor electric, dispozitivul său va fi același. Este mai ușor de luat ca exemplu motor electric trifazat. Astfel de motoare funcționează în etajele fabricii - pe transportor și în mașini-unelte, pun în mișcare vagonul liftului - în case și mine, pompează apă prin rotirea turbinei pompei - atât într-un puț mic, cât și la stații puternice de captare a apei. Scopul aplicatiei aparate trifazate larg.
Diferite tipuri de motor
Spre deosebire de un motor asincron trifazat, monofazat este adesea folosit în aparatele de uz casnic - aspiratoare, mașini de spălat, ventilatoare, robote de bucatarie, blendere etc. Ele sunt, de asemenea, utilizate în casetofone și playere de discuri de vinil. Chiar și ca parte a unui computer personal, puteți găsi mai mult de un motor asincron. Dar vom reveni la dispozitivul acestei versiuni a motorului puțin mai târziu.
Primul care s-a născut a fost un motor electric trifazat, al cărui principiu de funcționare a fost construit privind interacțiunea câmpurilor electromagnetice. Principalele părți ale unui motor cu inducție sunt statorul și rotorul. În consecință, partea care rămâne nemișcată a fost numită stator. Ea este situată direct sub carcasa exterioară a dispozitivului și are forma unui cilindru. În această parte, trei înfășurări sunt situate într-un cerc - la un unghi de 120 ° una față de cealaltă.
La motoarele moderne, multe înfășurări pot fi numărate, cu toate acestea, acestea sunt conectate între ele, astfel încât fiecare succesiv să difere de precedentul în fază, iar defazajul între înfășurările adiacente este de 120 °. Înfășurările sunt înfășurate sârmă de cupru, iar tensiunea din faza sa este conectată la fiecare dintre grupuri. Astfel, se dovedește că câmpul magnetic se mișcă de-a lungul acestor înfășurări, ca și cum s-ar închide într-un inel.
Statorul are, de asemenea, propriile înfășurări. Din moment ce electricitatea nu este furnizată la stator, acesta are dreptul să conductor închis, care se formează uneori sub forma unei așa-numite cuști de veveriță în loc de înfășurări. Pentru a fi mai precis, acest detaliu nu seamănă cu cușca în sine pentru un rozător agil, ci cu o roată de veveriță, concepută pentru ca animalul să-și împrăștie energia ireprimabilă. În rotorul dispozitivului, „cușca veveriței” se formează prin turnarea aluminiului topit în canelurile miezului, realizate din foi de oțel tipizate. Un astfel de dispozitiv se numește rotor cu cușcă de veveriță.
Dacă statorul este realizat cu înfășurări reale, atunci este de obicei realizat cu mai mulți poli. Un astfel de rotor se numește rotor de fază. Înfășurările acestui rotor sunt închise cu o stea sau un triunghi.
Rotorul are propriul arbore, care este susținut de rulmenți din spate și din față. Ei, la rândul lor, atașat la carcasa motorului astfel încât rotorul din interiorul statorului să se poată roti liber. Principiul de funcționare al motoarelor asincrone se bazează pe faptul că un câmp magnetic este indus în înfășurări sau „roata veveriță” de către stator. Sub acțiunea sa, în conductorii rotorului apare un curent și, odată cu acesta, propriul său câmp magnetic.
Câmpul magnetic alternativ al statorului trage rotorul împreună cu acesta și începe să se rotească. Dar câmpul magnetic al rotorului întârzie întotdeauna în raport cu câmpul statorului, iar rotația ambelor câmpuri nu poate avea loc sincron. Acest lucru forțează rotorul să depășească multe forțe care acționează asupra acestuia:
- forța gravitațională;
- frecare de rulare (dacă se folosește un rulment cu bile sau cu role);
- frecare de alunecare (dacă se folosește o bucșă de bronz ca rulment);
- forța de reacție a echipamentului antrenat.
Această din urmă forță depinde de multe momente, așa că nu poate fi redusă la niciun parametru fizic simplu. Dacă trebuie să mutați tramvaiul, atunci motorul trebuie să preia sarcina angrenajului, care trebuie deztors, din mașina în sine, care trebuie mutată, în plus, nu trebuie uitat de forța de frecare de rulare pe care o experimentează roțile vehiculului.
În cazul în care există o descriere a activității unei mașini de tocat carne profesională, care este acționată de un motor asincron, atunci rezistența cutiei de viteze în sine și acea bucată de carne sau chiar os care trebuie măcinată este depășită aici. .
Deoarece există un decalaj între stator și rotor, rotorul sub sarcină rămâne pur și simplu în urma statorului în ceea ce privește viteza unghiulară. Prin urmare, viteza rotorului depinde de sarcina pe arborele motorului. Principiul sincronismului este încălcat, de unde și numele dispozitivului în sine: „motor asincron”.
Principiul de funcționare încorporat în motorul asincron oferă o serie de avantaje acest aparat:
Dezavantajele motoarelor cu inducție
Motoarele electrice cu acest design au și dezavantajele lor. Acestea includ pierderile de căldură. Ei într-adevăr se poate supraîncălzi mai ales sub sarcină. Pentru a face acest lucru, carcasele lor sunt adesea făcute cu nervuri - astfel încât să radieze mai bine căldură în spațiul înconjurător. De asemenea, un dispozitiv asincron este adesea echipat cu un ventilator așezat pe același arbore pentru a sufla rotorul, deoarece carcasa poate elimina doar căldura din stator, deoarece nu există un spațiu de aer între ele, ceea ce nu se poate spune despre rotor.
Incapacitatea de a menține stabilă viteza de rotație face ca motorul asincron să nu fie aplicabil în unele dispozitive.
Conexiune motor monofazat
 În aparatele noastre de uz casnic, puteți găsi cel mai adesea același dispozitiv asincron. Dar cum „înțelege” în ce direcție ar trebui să înceapă să se rotească atunci când o pornește, dacă pe ea sunt pornite doar o fază și zero? Într-un astfel de motor asincron, principiul de funcționare este același cu cel al unui motor trifazat - rotația câmpului magnetic. Pentru a face acest lucru, fiecare motor are încă un contact - pornire.
În aparatele noastre de uz casnic, puteți găsi cel mai adesea același dispozitiv asincron. Dar cum „înțelege” în ce direcție ar trebui să înceapă să se rotească atunci când o pornește, dacă pe ea sunt pornite doar o fază și zero? Într-un astfel de motor asincron, principiul de funcționare este același cu cel al unui motor trifazat - rotația câmpului magnetic. Pentru a face acest lucru, fiecare motor are încă un contact - pornire.
Statorul are două înfășurări cu un unghi de 90° între ele. Ambele grupuri de bobine sunt conectate la aceeași fază, totuși, pentru a asigura aceeași deplasare de 90° între înfășurări, una dintre ele fiind conectată printr-un condensator. Acest lucru face ca câmpul magnetic să se rotească.
Motoare similare sunt folosite, de exemplu, în râșnițele de cafea sau storcatoarele. Poți auzi cum se schimbă sunetul motorului cu inducțieîn aceste dispozitive când sunt sub sarcină. La ralanti, viteza rotorului este clar mai mare.
În concluzie, este important să spunem că motoarele electrice asincrone au câștigat o mare popularitate. Desigur, nu trebuie să uităm de unele dintre deficiențe. Cu toate acestea, toate se suprapun datorită numeroaselor avantaje.
Mașini electrice care convertesc energie electrica curentul alternativ în energie mecanică se numesc motoare cu curent alternativ.
În industrie, motoarele asincrone trifazate sunt cele mai utilizate. Să luăm în considerare dispozitivul și principiul de funcționare al acestor motoare.
Principiul de funcționare al unui motor asincron se bazează pe utilizarea unui câmp magnetic rotativ.
Pentru a înțelege funcționarea unui astfel de motor, vom face următorul experiment.
Fixăm magnetul de potcoavă pe axă, astfel încât să poată fi rotit de mâner. Intre polii magnetului asezam pe axa un cilindru de cupru care se poate roti liber.
Figura 1. Cel mai simplu model pentru obținerea unui câmp magnetic rotativ
Să începem să rotim magnetul de mâner în sensul acelor de ceasornic. Câmpul magnetului va începe și el să se rotească și, în timpul rotației, va traversa cilindrul de cupru cu liniile sale de forță. În cilindru, conform legii inducției electromagnetice, vor apărea curenți turbionari, care vor crea propriul lor câmp magnetic - câmpul cilindrului. Acest câmp va interacționa cu câmpul magnetic al magnetului permanent, determinând cilindrul să se rotească în aceeași direcție cu magnetul.
S-a stabilit că viteza de rotație a cilindrului este puțin mai mică decât viteza de rotație a câmpului magnetic.
Într-adevăr, dacă cilindrul se rotește cu aceeași viteză cu câmpul magnetic, atunci liniile magnetice de forță nu îl traversează și, prin urmare, în el nu apar curenți turbionari, determinând rotația cilindrului.
Viteza de rotație a câmpului magnetic este de obicei numită sincronă, deoarece este egală cu viteza de rotație a magnetului, iar viteza de rotație a cilindrului se numește asincronă (nesincronă). Prin urmare, motorul în sine a fost numit motor cu inducție. Viteza de rotație a cilindrului (rotorului) diferă de viteza sincronă de rotație a câmpului magnetic printr-o cantitate mică, numită alunecare.
Indicând viteza de rotație a rotorului prin n1 și viteza de rotație a câmpului prin n, putem calcula cantitatea de alunecare în procente folosind formula:
s = (n - n1) / n.
În experimentul de mai sus, am obținut un câmp magnetic rotativ și rotația cilindrului cauzată de acesta din cauza rotației unui magnet permanent, deci un astfel de dispozitiv nu este încă un motor electric. Este necesar să forțați un curent electric pentru a crea un câmp magnetic rotativ și să îl utilizați pentru a roti rotorul. Această sarcină a fost rezolvată cu brio de M. O. Dolivo-Dobrovolsky la vremea lui. El a sugerat folosirea unui curent trifazat în acest scop.
Dispozitivul unui motor electric asincron M. O. Dolivo-Dobrovolsky
Figura 2. Schema unui motor electric asincron Dolivo-Dobrovolsky
Trei înfășurări sunt plasate pe polii unui miez inelar de fier, numit statorul unui motor electric, rețele de curent trifazat 0 situate una față de alta la un unghi de 120 °.
În interiorul miezului, pe ax este fixat un cilindru metalic, numit rotorul motorului electric.
Dacă înfășurările sunt conectate între ele așa cum se arată în figură și conectate la o rețea de curent trifazat, atunci fluxul magnetic total creat de cei trei poli se va dovedi a fi în rotație.
Figura 3 prezintă un grafic al modificărilor curenților în înfășurările motorului și procesul de apariție a unui câmp magnetic rotativ.
Să aruncăm o privire mai atentă asupra acestui proces.
Figura 3. Obținerea unui câmp magnetic rotativ
În poziția „A” din grafic, curentul în prima fază este zero, în a doua fază este negativ, iar în a treia fază este pozitiv. Curentul prin bobinele polilor va curge în direcția indicată de săgețile din figură.
După ce am determinat prin regula din dreapta direcția fluxului magnetic creat de curent, ne vom asigura că polul sud (S) va fi creat la capătul interior al polului (cu fața spre rotor) al celei de-a treia bobine, iar polul nord (C) va fi creat la polul celei de-a doua bobine. Fluxul magnetic total va fi direcționat de la polul celei de-a doua bobine prin rotor către polul celei de-a treia bobine.
În poziția „B” din grafic, curentul în a doua fază este zero, în prima fază este pozitiv, iar în a treia fază este negativ. Curentul care curge prin bobinele polilor creează un pol sud (S) la capătul primei bobine și un pol nord (C) la capătul celei de-a treia bobine. Fluxul magnetic total va fi direcționat acum de la al treilea pol prin rotor către primul pol, adică polii se vor mișca cu 120°.
În poziția „B” de pe grafic, curentul în a treia fază este zero, în a doua fază este pozitiv, iar în prima fază este negativ. Acum, curentul care curge prin prima și a doua bobină va crea un pol nord (C) la capătul polului primei bobine și un pol sud (S) la capătul polului celei de-a doua bobine, adică polaritatea. din câmpul magnetic total se va deplasa cu încă 120 °. În poziția „G” pe grafic, câmpul magnetic se va deplasa cu încă 120 °.
Astfel, fluxul magnetic total își va schimba direcția cu o schimbare a direcției curentului în înfășurările (polii) statorului.
În acest caz, într-o perioadă de schimbare a curentului în înfășurări, fluxul magnetic va face o revoluție completă. Fluxul magnetic rotativ va trage cilindrul odata cu el si in acest fel vom obtine un motor electric asincron.
Amintiți-vă că în Figura 3 înfășurările statorului sunt conectate printr-o „stea”, totuși, un câmp magnetic rotativ se formează și atunci când sunt conectate printr-un „triunghi”.
Dacă schimbăm înfășurările fazei a doua și a treia, atunci fluxul magnetic își va schimba direcția de rotație în sens opus.
Același rezultat poate fi obținut fără a schimba înfășurările statorului, ci prin direcționarea curentului celei de-a doua faze a rețelei în a treia fază a statorului și a treia fază a rețelei în a doua fază a statorului.
Astfel, direcția de rotație a câmpului magnetic poate fi schimbată prin comutarea oricăror două faze.
Am considerat dispozitivul unui motor asincron cu trei înfășurări pe stator. În acest caz, câmpul magnetic rotativ este bipolar și numărul de rotații într-o secundă este egal cu numărul de perioade de schimbare a curentului într-o secundă.
Dacă șase înfășurări sunt plasate în jurul circumferinței statorului, va fi creat un câmp magnetic rotativ cu patru poli. Cu nouă înfășurări, câmpul va fi cu șase poli.
Cu o frecvență a curentului trifazat f egală cu 50 de perioade pe secundă sau 3000 pe minut, numărul de rotații n ale câmpului rotativ pe minut va fi:
cu un stator cu doi poli n \u003d (50 x 60) / 1 \u003d 3000 rpm,
cu un stator cu patru poli n \u003d (50 x 60) / 2 \u003d 1500 rpm,
cu un stator cu șase poli n \u003d (50 x 60) / 3 \u003d 1000 rpm,
cu numărul de perechi de poli statori egal cu p: n = (f x 60) / p,
Deci, am stabilit viteza de rotație a câmpului magnetic și dependența acestuia de numărul de înfășurări de pe statorul motorului.
După cum știm, rotorul motorului va rămâne oarecum în urmă în rotație.
Cu toate acestea, decalajul rotorului este foarte mic. Deci, de exemplu, când la ralanti motor, diferența de viteză este de doar 3%, iar la o sarcină de 5 - 7%. În consecință, viteza unui motor cu inducție se modifică în limite foarte mici atunci când sarcina se modifică, ceea ce este unul dintre avantajele sale.
Luați în considerare acum dispozitivul motoarelor electrice asincrone
Statorul unui motor electric asincron modern are poli neexprimați, adică suprafața interioară a statorului este complet netedă.
Pentru a reduce pierderile de curenți turbionari, miezul statorului este fabricat din foi de oțel ștanțate subțiri. Miezul statorului asamblat este fixat într-o carcasă de oțel.
O înfășurare de sârmă de cupru este așezată în fantele statorului. Înfășurările de fază ale statorului motorului electric sunt conectate printr-o „stea” sau „triunghi”, pentru care toate începuturile și capetele înfășurărilor sunt aduse la carcasă - la un scut special izolator. Un astfel de dispozitiv stator este foarte convenabil, deoarece vă permite să-și porniți înfășurările pentru diferite tensiuni standard.
Rotorul unui motor cu inducție, ca și statorul, este asamblat din foi de oțel ștanțate. Înfășurarea este așezată în canelurile rotorului.
În funcție de designul rotorului, motoarele electrice asincrone sunt împărțite în motoare cu un rotor cu colivie și un rotor de fază.
Înfășurarea rotorului cu colivie este realizată din tije de cupru plasate în canelurile rotorului. Capetele tijelor sunt conectate cu un inel de cupru. O astfel de înfășurare se numește înfășurare „cușcă de veveriță”. Rețineți că tijele de cupru din caneluri nu sunt izolate.
La unele motoare, „cușca veveriței” este înlocuită cu un rotor turnat.
Un motor asincron cu rotor de fază (cu inele colectoare) este de obicei folosit la motoarele electrice de mare putere și în acele cazuri; când este necesar ca motorul electric să genereze o forță mare la pornire. Acest lucru se realizează prin faptul că în înfășurări motor de fază reostatul de pornire este pornit.
Motoarele cu inducție cu colivie sunt pornite în două moduri:
1) Conexiune directă tensiune trifazată rețeaua la statorul motorului. Această metodă este cea mai ușoară și cea mai populară.
2) Reducerea tensiunii furnizate infasurarilor statorului. Tensiunea este redusă, de exemplu, prin comutarea înfășurărilor statorului de la stea la triunghi.
Motorul este pornit atunci când înfășurările statorului sunt conectate cu o stea, iar când rotorul atinge turația normală, înfășurările statorului trec la o conexiune delta.
Curentul din firele de alimentare cu această metodă de pornire a motorului este redus de 3 ori față de curentul care ar apărea la pornirea motorului prin conexiune directă la rețea cu înfășurările statorului conectate printr-o „deltă”. Cu toate acestea, această metodă este potrivită numai dacă statorul este proiectat pentru funcționare normală atunci când înfășurările sale sunt conectate într-un „triunghi”.
Cel mai simplu, mai ieftin și mai fiabil este un motor asincron cu colivie, dar acest motor are câteva dezavantaje - forță scăzută de pornire și curent mare de pornire. Aceste deficiențe sunt în mare măsură eliminate prin utilizarea unui rotor de fază, dar utilizarea unui astfel de rotor crește semnificativ costul motorului și necesită un reostat de pornire.
Principiul de funcționare
Principiul de funcționare al unui motor electric asincron se bazează pe interacțiunea curentului indus al rotorului cu fluxul magnetic al statorului. La pornirea bobinajului motor trifazat sub tensiunea unei surse de curent alternativ trifazat, în interiorul orificiului statorului se formează un câmp magnetic rotativ, a cărui frecvență de rotație este egală cu
n1=60fp
unde n1 este frecvența de rotație a câmpului magnetic, rpm; f - frecventa curentului, Hz; p este numărul de perechi de poli magnetici ai motorului.
Liniile de forță ale câmpului magnetic rotativ traversează tijele înfășurării în scurtcircuit a rotorului și în ele este indus un EMF, ceea ce provoacă apariția curentului și fluxului magnetic în rotorul motorului.
Interacțiunea câmpului magnetic al statorului cu fluxul magnetic al rotorului creează un cuplu mecanic, sub influența căruia rotorul începe să se rotească. Viteza rotorului este puțin mai mică decât viteza câmpului magnetic. Prin urmare, motorul se numește asincron.
Valoarea care caracterizează întârzierea rotorului față de câmpul magnetic în unități relative se numește alunecare, se calculează prin formula
S = (n1−n2)/n1,
unde S - alunecare (relativ viteză unghiulară); n1 - frecvența de rotație a câmpului magnetic, rpm; n2 - turația nominală a rotorului, rpm.
Pentru a conecta motorul la rețea, înfășurările lui statorice trebuie conectate într-o „stea” sau „triunghi”.
Orez. 4 Scheme de conectare:
a - triunghi, b - stea.
Pentru a porni motorul conform schemei „triunghi”, trebuie să conectați începutul primei înfășurări la sfârșitul celei de-a doua, începutul celei de-a doua înfășurări la sfârșitul celei de-a treia și începutul celei de-a treia la sfârşitul primei. Punctele de conectare ale înfășurărilor sunt conectate la trei faze ale rețelei (Fig. 4, a).
Pentru a conecta motorul la rețea conform schemei „stea”, este necesar să conectați toate capetele înfășurărilor electric la un punct și să conectați toate începuturile înfășurărilor la fazele rețelei (Fig. 4). , b).
Schemele de cablare sunt întotdeauna afișate pe partea din spate a capacului care închide cutia de borne a motorului.
Pentru a schimba sensul de rotație al unui motor asincron trifazat, este suficient să schimbați oricare două faze ale rețelei, indiferent de circuitul de comutare al motorului. Pentru a schimba rapid sensul de rotație al motorului, se folosesc comutatoare inversoare, comutatoare batch sau demaroare magnetice inversoare.
Un motor electric asincron trifazat cu rotor cu colivie, împreună cu simplitatea designului, fiabilitatea ridicată în funcționare, durabilitatea, costul scăzut și versatilitatea, are un dezavantaj semnificativ: atunci când este pornit, apare un curent de pornire, valoarea de care este de 5-7 ori mai mult decât nominal. Curent mare de pornire reteaua electrica de obicei, necalculat, provoacă o scădere semnificativă a tensiunii, care, la rândul său, afectează negativ funcționarea stabilă a receptoarelor electrice învecinate.
Pentru a reduce curenții de pornire ai motoarelor trifazate cu colivie asincronă de mare putere, aceștia sunt porniți folosind un comutator de circuit stea-triunghi. În acest caz, mai întâi înfășurările motorului sunt conectate conform schemei „stea”, apoi, după ce rotorul motorului atinge viteza nominală, înfășurările sale sunt comutate la schema „triunghi”.
Scăderea curentului de pornire al motorului la comutarea înfășurărilor sale de la o stea la un triunghi are loc deoarece în loc de circuitul „triunghi” destinat unei anumite tensiuni de rețea, fiecare înfășurare a motorului este pornită la o tensiune de √3 ori mai mică și curentul consumat se reduce de trei ori. Puterea dezvoltată de motorul electric la pornire este, de asemenea, redusă cu un factor de trei. Prin urmare, metoda descrisă de reducere a curentului de pornire poate fi utilizată numai la o sarcină de cel mult 1/3 din cea nominală.
Sistemul de curent alternativ trifazat, care a făcut posibilă crearea unor dispozitive pentru obținerea unui flux magnetic rotativ, a provocat apariția celui mai comun motor electric în prezent, numit asincron. Acest nume se datorează faptului că partea rotativă a mașinii - rotorul - se rotește întotdeauna cu o viteză care nu este egală cu viteza fluxului magnetic, adică. desincronizat cu el. Fabricat de la fracțiuni de watt la mii de kilowați la tensiuni de 127, 220, 380, 500, 600, 3000, 6000, 10.000 V, acest motor electric este simplu în design, fiabil în funcționare și ieftin în comparație cu alte tipuri. Se foloseste in toate tipurile de lucrari in care nu este necesara mentinerea unei viteze constante de rotatie, precum si in viata de zi cu zi, intr-o varianta monofazata pentru putere redusa.
Principiul de funcționare a unui motor cu inducție
Luați în considerare dispozitivul prezentat în fig. Este format dintr-un magnet permanent 1, un disc de cupru 2, un mâner 3 și rulmenți 4. Dacă rotiți magnetul cu mânerul, discul de cupru începe să se rotească în aceeași direcție, dar cu o frecvență mai mică. Un disc de cupru poate fi privit ca un număr nenumărat de spire închise; când magnetul 1 se rotește, liniile sale magnetice de forță (m.s.l.) traversează spirele discului, iar în spire este indusă o forță electromotoare.
Denota:
n, - frecvența de rotație a magnetului (frecvența sincronă), rpm;
n2 - frecvența de rotație a discului, rpm; n - diferența dintre frecvențele de rotație ale magnetului și ale discului, rpm.
Viteza de rotație a discului este mai mică decât viteza de rotație a magnetului și, prin urmare, discul se rotește la o frecvență nesincronă (asincronă). Diferența dintre frecvențele magnetului și discului este frecvența cu care M.S.L. traversează spirele discului. Raportul dintre diferența de frecvență și frecvența sincronă se numește alunecare. Alunecarea poate fi exprimată în fracții de unitate sau ca procent:

În motoare se creează un câmp magnetic rotativ curent trifazat care curge prin înfășurarea statorului, iar rolul discului este îndeplinit de înfășurarea rotorului. Oțelul activ al statorului și rotorului servește ca circuit magnetic, care reduce rezistența la fluxul magnetic de sute de ori.
Sub influența tensiunii de rețea Ul aplicată statorului, în înfășurarea acestuia circulă un curent I. Acest curent creează un flux magnetic rotativ F, care se închide prin stator și rotor. Fluxul creează fem în ambele înfășurări. E( și E2, atât în înfășurările primare, cât și în cele secundare ale transformatorului. Astfel, un motor cu inducție este similar transformator trifazat, în care emf generate de fluxul magnetic rotativ. 
Orez. 2. Funcționarea unui motor asincron la cos f2 = 1
Lăsați fluxul să se rotească în direcția acelui ceasului. Sub influența emf. E2 în curentul de înfășurare a rotorului I2 va curge, a cărui direcție este prezentată în fig. 2. Să presupunem că este în fază cu E2. Interacțiunea curentului I2 și a fluxului Ф creează forțe electromagnetice F care fac rotorul să se rotească, în urma fluxului în rotație. Astfel, un motor cu inducție este un transformator cu o înfășurare secundară rotativă și, prin urmare, este capabil să se transforme putere electrica E2I2 cos f la mecanic.
Rotorul rămâne întotdeauna în urma fluxului magnetic rotativ, deoarece numai în acest caz poate apărea fem. E2, și deci curentul 12 și forța F. Pentru a schimba sensul de rotație al rotorului, trebuie să schimbați sensul de rotație al fluxului. Pentru a face acest lucru, schimbați oricare două fire care furnizează curent de la rețea la stator. În acest caz, succesiunea fazelor ABC se schimbă în ACB sau BAC, iar fluxul se rotește în sens opus.
Rotorul motorului se rotește cu o frecvență asincronă n2 și, prin urmare, motorul se numește asincron. Frecvența de rotație a fluxului magnetic se numește frecvența sincronă n1. Frecvența de rotație ![]() rotor
rotor
Teoretic, alunecarea variază de la 1 la 0 sau de la 100% la 0, deoarece cu un rotor staționar în primul moment al pornirii, n2 - 0; iar dacă ne imaginăm că rotorul se rotește sincron cu curgerea, n2 = nx.
Cu cât sarcina pe arbore este mai mare, cu atât viteza rotorului n2 este mai mică și, în consecință, S mai mare, deoarece cuplul de frânare mai mare trebuie echilibrat de cuplu; acesta din urmă este posibil numai cu o creștere a E2 și I2 și, prin urmare, S. Alunecarea la sarcina nominală SH pentru motoarele asincrone este de la 1 la 7%; numărul mai mic se referă la motoare puternice.