Moteurs à courant continu synchrones. Grande encyclopédie du pétrole et du gaz. Moteurs pas à pas linéaires synchrones
A l'un ou à l'autre Appareil électroménager travaillé, il nécessite un mécanisme d'entraînement spécial. Un de ces mécanismes est le moteur pas à pas. Dans ce matériel, vous apprendrez ce que c'est, quel principe de son fonctionnement et dans quelles catégories il est divisé.
Le moteur pas à pas peut être unipolaire ou bipolaire. Il s'agit d'un moteur à courant continu électrique et sans balais capable de diviser une révolution complète en plusieurs étapes identiques. Il comprend les détails suivants :
Générateurs de courant idéaux Un générateur de courant peut être représenté par ce symbole, où le sens de la flèche indique le sens du courant : un générateur idéal. Composants dans lesquels certains forces électriques sont appelés générateurs électriques. Ils abritent l'interaction entre des phénomènes électriques et des phénomènes de nature différente, qui réalisent la génération d'électricité par conversion à partir d'autres formes d'énergie. Ce sont des bipôles actifs, dotés de bornes permettant la connexion à d'autres composants électriques et se répartissant en deux catégories : courant à courant.

Le moteur pas à pas est principalement utilisé aux fins suivantes :
- travail de la fraiseuse;
- travaux de meulage;
- assure le fonctionnement des divers appareils électroménagers;
- travaux de moyens mécaniques industriels;
- assure le transport.
Générateurs de tension idéaux Un générateur de tension peut être indiqué par l'un des symboles suivants. Représentation du générateur de courant. Quels types de générateurs existe-t-il ? Grand parcs éoliens se composent de centaines d'éoliennes individuelles connectées à un réseau électrique. L'éolien offshore est plus stable, fournit plus d'énergie et a moins d'impact visuel, mais les coûts de construction et Entretien significativement plus élevés. Les petits parcs éoliens terrestres fournissent de l'électricité dans des endroits isolés.
Principe d'entraînement
 Le principe de fonctionnement de ce variateur est le suivant. Lorsque la tension est appliquée aux bornes, les balais du moteur pas à pas lui-même commencent à bouger constamment. moteur mouvement oisif possède une propriété unique : il convertit les impulsions entrantes, ayant une orientation principalement rectangulaire, à une position prédéterminée de l'arbre d'entraînement attaché.
Le principe de fonctionnement de ce variateur est le suivant. Lorsque la tension est appliquée aux bornes, les balais du moteur pas à pas lui-même commencent à bouger constamment. moteur mouvement oisif possède une propriété unique : il convertit les impulsions entrantes, ayant une orientation principalement rectangulaire, à une position prédéterminée de l'arbre d'entraînement attaché.
Les compagnies d'électricité achètent de plus en plus l'électricité excédentaire produite par les petites éoliennes domestiques. L'énergie éolienne est une énergie fossile alternative riche, renouvelable et soutenue par une économie verte, répandue, propre, n'émet pas de gaz à effet de serre pendant son fonctionnement et nécessite des terrain. L'environnement est généralement moins problématique que environnement. Lames du vent, ces bons géants sont toujours en mouvement, incapables de charmer et curieux.
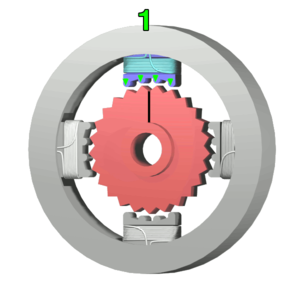
Chacune des impulsions entrantes est capable de déplacer l'arbre selon un certain angle. Les appareils qui sont équipés d'une telle boîte de vitesses ont une efficacité maximale, à condition qu'il y ait plusieurs électro-aimants à engrenages qui sont situés autour d'une pièce centrale en fer qui a une forme d'engrenage. Le circuit de commande externe alimente l'électroaimant. S'il est nécessaire de faire tourner l'arbre du moteur, l'électro-aimant auquel l'énergie est appliquée attire les dents de la roue. Lorsqu'ils sont alignés avec l'électroaimant, ils sont décalés par rapport à la partie magnétique ultérieure du moteur.
Types de moteurs pas à pas
Et donc, afin de douter, nous allons vous expliquer comment ils fonctionnent. Tout d'abord, nous commençons par distinguer deux types d'éoliennes : à axe vertical et à axe horizontal. Les éoliennes couramment utilisées dans les parcs éoliens modernes se composent d'une tour et de trois pales à axe horizontal, d'où leur nom. Moins courantes sont les éoliennes à axe vertical, moins efficaces que les premières, mais elles sont capables de diriger le vent dans toutes les directions, et même avec des vents légers elles peuvent tourner rapidement.
Moteurs pas à pas linéaires synchrones
Ils sont constitués d'une tour centrale autour de laquelle sont disposées des pales verticales. moteur électrique courant alternatif est un moteur électrique qui peut fonctionner en courant alternatif. Avec enroulement statorique uniquement Ces moteurs sont l'une des alimentations les plus utilisées pour ce type et se divisent en plusieurs aspects : Nombre de phases Moteur triphasé.
Le premier électroaimant s'éteint, puis le second s'allume, après quoi l'engrenage commence à tourner, tout en s'alignant avec la roue précédente. Alors cette action est répétée. nombre de fois requis. Chacune de ces rotations est appelée un pas constant, et la vitesse de rotation d'un moteur pas à pas peut être calculée en comptant le nombre de pas nécessaires pour terminer sa révolution.
Moteur à induction triphasé Aimant de stator dans un moteur triphasé asynchrone Un moteur triphasé est un type de moteur électrique qui nécessite pour démarrer un système de courants triphasés, phasés dans le temps et dans l'espace avec un angle de 120°. Un moteur asynchrone est un moteur à courant alternatif, vitesse angulaire son rotor est inférieur à la vitesse de rotation du champ magnétique généré par les bobinages du stator, dont il est asynchrone. Un moteur à induction est également appelé moteur à induction en raison de son principe de fonctionnement décrit ci-dessous.
Pour contrôler le fonctionnement du moteur pas à pas, un pilote spécial est utilisé. Cela est nécessaire dans les cas où vous configurez un entraînement pour faire fonctionner une machine ou l'utilisez pour démarrer une éolienne.
Types de moteurs pas à pas
Les moteurs pas à pas sont divisés en types suivants :
Caractéristiques de connexion d'un moteur pas à pas
Un moteur à induction peut être utilisé comme alternateur avec ou sans l'utilisation de condensateurs, selon qu'il est connecté au secteur ou non. Il est utilisé pour les petites puissances dans des situations où la facilité d'utilisation d'un moteur synchrone est privilégiée même au détriment des performances.
Un moteur monophasé est un type de moteur électrique qui nécessite l'utilisation d'une ligne électrique avec une phase électrique et un fil neutre, ces moteurs peuvent avoir différentes applications et conceptions, en tenant généralement compte de la caractéristique non électrique Moteurs biphasés sont utilisés pour entraîner ces moteurs, où ils reçoivent une deuxième phase en utilisant un condensateur.
- avec un aimant permanent ;
- entraînement hybride synchrone ;
- moteur variable.
Tous sont quelque peu différents les uns des autres, y compris les principes de leur travail.
Par exemple, les entraînements à aimants permanents sont équipés d'une pièce magnétique spéciale dans le rotor. Tel les moteurs fonctionnent sur le principe de l'attraction ou de la répulsion stator et rotor d'un moteur basé sur un électroaimant.
Le moteur synchrone est un moteur monophasé moins utilisé compte tenu de plusieurs applications caractérisées par un champ magnétique induit par un champ magnétique synchronisé avec le champ magnétique du stator, qui tourne alors à la même fréquence. Lorsque le courant circule dans les enroulements, un champ magnétique est créé autour du rotor. La partie gauche du rotor est rejetée par l'aimant gauche et attirée par la droite. De même, en bas à droite. Le couple génère la rotation. Lorsque l'armature s'aligne horizontalement, le commutateur inverse la direction du courant à travers les enroulements, modifiant également le champ magnétique.
Le moteur variable a un rotor en fer conventionnel et son fonctionnement est construit sur le principe de la fondamentalité. Lorsque le niveau minimum de répulsion est autorisé avec le plus petit écart, alors que les points du rotor ont une attraction sur les pôles du stator.
Mais un entraînement hybride peut combiner les deux principes de fonctionnement, il est considéré comme le modèle de moteur pas à pas le plus cher.
Un moteur linéaire est un moteur électrique dans lequel le rotor et le stator, au lieu d'être circulaires, "tournent" et au lieu de créer un couple, ils créent une force linéaire. Il existe de nombreuses solutions de conception pour les moteurs linéaires, qui peuvent être divisées en deux catégories : faible accélération et forte accélération.
Principales spécifications du moteur
Présentation du moteur électrique. Les véhicules électriques peuvent être différents et selon les besoins ou caractéristiques de conception sur 1, 2, 3, 4 roues ou plus. Quels sont les types de véhicules les plus courants ? Moto électrique, moto zéro Un scooter électrique ou moto électrique est un véhicule à deux ou trois roues qui utilise Moteur électrique pour le mouvement.
Moteurs pas à pas biphasés
 Le moteur biphasé est très simple, il peut être installé par une personne sans expérience particulière. Que vous l'ayez assemblé vous-même ou que vous l'ayez acheté dans le commerce, il dispose de deux types d'enroulements de bobine :
Le moteur biphasé est très simple, il peut être installé par une personne sans expérience particulière. Que vous l'ayez assemblé vous-même ou que vous l'ayez acheté dans le commerce, il dispose de deux types d'enroulements de bobine :
L'article traite des surintensités aléatoires et des surcharges de couple à court terme dans les moteurs asynchrones polyphasés, les moteurs courant continu et moteurs synchrones polyphasés. La capacité de surcharge actuelle des machines tournantes est indiquée pour assortir ces machines avec des dispositifs de commande et de protection. L'effet thermique dans les bobinoirs varie approximativement en fonction du temps et de la puissance du second courant. Un courant dépassant le courant nominal augmentera la température. Sauf indication contraire, on peut supposer que la machine ne fonctionnera à des surcharges de courant pendant sa durée de vie que pendant quelques courtes périodes de temps.
- unipolaire;
- bipolaire.
Si un moteur pas à pas a un enroulement avec une prise magnétique centrale affectant chaque phase, il s'agit alors d'un entraînement unipolaire. Chaque section d'enroulement doit être allumée pour assurer la bonne direction du champ magnétique. Dans ce variateur, le pôle magnétique est capable de fonctionner sans nécessiter de commutation supplémentaire, donc les directions du courant et la commutation des circuits sont rendues très simples, en utilisant un transistor pour chaque enroulement. Les changements de phase suivants sont pris en compte :
Si une machine à courant alternatif doit être utilisée comme générateur et non comme moteur, la surcharge doit faire l'objet d'un accord. Moteurs Les moteurs polyphasés d'une puissance nominale jusqu'à 315 kW et d'une tension nominale jusqu'à 1 kV doivent supporter : un courant égal à 1,5 fois le courant nominal pendant au moins 2 minutes. Pour les moteurs polyphasés de puissance nominale supérieure à 315 kW et pour tous moteurs monophasés il n'y a pas de surintensité accidentelle.
Surcharge de torsion momentanée des moteurs
L'interrupteur doit supporter 1,5 fois le courant nominal pendant 60 secondes dans une combinaison appropriée des conditions suivantes. Polyphasé moteurs asynchrones et moteurs à courant continu Les moteurs, quels que soient leur type de charge et leur conception, doivent supporter 15 secondes sans arrêt ni changement brusque de surcharge de couple, 60 % de leur couple nominal, avec tension et fréquence maintenues avec valeurs nominales. Pour les moteurs à courant continu, le couple doit être exprimé en termes de surintensité.
- trois fils par phase ;
- six par sortie.
Le microcontrôleur du moteur d'entraînement peut être utilisé pour activer le transistor dans une séquence particulière.
Et les enroulements peuvent également être connectés en touchant les fils de connexion avec les aimants permanents du variateur. Lors de la connexion des bornes de la bobine, il sera difficile de faire tourner l'arbre. Résistance entre l'extrémité de la bobine et le fil commun égal à la moitié de la résistance extrémités de bobine et de fil. Cela ressemble à ça parce que fil commun Il a grande longueur que la demi-pièce utilisée pour connecter les bobines.
Les moteurs destinés à des applications spéciales nécessitant un couple élevé doivent être adaptés. Dans le cas des moteurs asynchrones en court-circuit conçus spécifiquement pour atteindre un courant de démarrage moins de 4,5 fois supérieur courant nominal, la surcharge de couple peut être inférieure à 60 % de la valeur indiquée au premier alinéa, mais pas inférieure à 50 %.
Dans le cas de types spéciaux de moteurs asynchrones avec des caractéristiques de démarrage spéciales, tels que les moteurs à vitesse variable ou les moteurs asynchrones alimentés par des convertisseurs statiques, la valeur de surcouple doit être convenue. Sauf indication contraire, un moteur synchrone polyphasé doit supporter, quelle que soit la charge, pendant 15 secondes le couple de surcharge décrit ci-dessous sans perte de synchronisation tout en maintenant l'excitation à une valeur correspondant à la charge nominale.
Les moteurs pas à pas bipolaires ont un enroulement monophasé, dans lequel le courant est fourni de manière inversée à l'aide d'un pôle magnétique. Le système de contrôle dans ce cas sera complexe à l'aide d'un pont de liaison. Il y a deux fils par phase, mais ils ne sont pas communs. En mélangeant le signal du moteur pas à pas à des fréquences élevées, l'effet de frottement du système peut être réduit.
De plus, un autre type de moteur pas à pas est triphasé, mais sa portée est trop étroite :
- pendant le fonctionnement des fraiseuses CNC;
- sur certains véhicules où un papillon des gaz est utilisé ;
- sur le lecteur et les imprimantes de certaines marques.
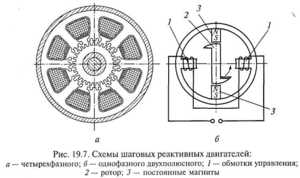
Moteurs pas à pas réactifs : caractéristiques et principe de fonctionnement
 Il convient de noter que les moteurs pas à pas actifs présentent un gros inconvénient: il s'agit d'un pas important, atteignant plusieurs dizaines de degrés. En revanche, réactif les moteurs pas à pas sont capables de réduire la fréquence du rotor, grâce à quoi le pas devient angulaire de moins d'un degré.
Il convient de noter que les moteurs pas à pas actifs présentent un gros inconvénient: il s'agit d'un pas important, atteignant plusieurs dizaines de degrés. En revanche, réactif les moteurs pas à pas sont capables de réduire la fréquence du rotor, grâce à quoi le pas devient angulaire de moins d'un degré.
La principale caractéristique de la propulsion par jet est que les dents sont placées sur les pôles du stator. Le moment de synchronisation dans celui-ci est fourni par la différence de résistance magnétique le long de l'axe transversal et longitudinal de l'entraînement.
Le moteur pas à pas réactif a un inconvénient majeur : il pas de couple de synchronisation si les enroulements du stator sont hors tension.
Il est possible d'augmenter le degré de réduction du moteur, quel qu'il soit, actif ou réactif, en utilisant des structures à plusieurs packages, lorsque les dents du stator sont décalées l'une vers l'autre d'une partie de la division et que le rotor de chaque package ne le fait pas se déplacent et les axes de leurs pôles sont les mêmes. Similaire le design est très complexe en termes de création et n'est pas bon marché sous forme finie, il nécessitera également un commutateur complexe.
À ce jour, vous pouvez trouver en vente un grand nombre de modèles de moteurs différents, qui diffèrent par des paramètres tels que:
- nombre de phases ;
- type de placement d'enroulement ;
- manières de fixer le rotor, etc.
Dans les moteurs pas à pas à induction, le couple est créé par l'interaction d'un champ magnétique, qui est créé par les enroulements du stator, et d'un aimant permanent situé dans la partie dentée de l'entrefer.
Le couple de synchronisation dans un moteur inducteur est lui-même réactif, ce qui entraîne un enroulement statorique, tandis que l'aimant permanent est capable de produire un couple de fixation, maintenant ainsi le rotor en place. position souhaitée sans courant.
Contrairement à un moteur pas à pas réactif, un inducteur, avec un pas similaire, a un couple de synchronisation plus important, ainsi qu'une amélioration Caractéristiques.
Moteurs pas à pas linéaires synchrones
 Afin d'automatiser certains processus de production dans une entreprise, il devient parfois nécessaire de déplacer des objets dans un avion. Pour faire ça vous devez utiliser un convertisseur spécial mouvement de rotation en translation, qui est obtenu en appliquant la cinématique.
Afin d'automatiser certains processus de production dans une entreprise, il devient parfois nécessaire de déplacer des objets dans un avion. Pour faire ça vous devez utiliser un convertisseur spécial mouvement de rotation en translation, qui est obtenu en appliquant la cinématique.
Avec les moteurs pas à pas linéaires, vous pouvez convertir la commande d'impulsion directement en mouvement linéaire, ce qui simplifiera grandement le schéma cinématique de divers entraînements électriques.
Le stator de cet entraînement se présente sous la forme d'une plaque magnétiquement douce et les fils sont magnétisés par le fonctionnement d'un aimant permanent.
Les divisions des dents dans le stator et la partie mobile sont les mêmes, tandis que ils peuvent être décalés d'une demi-division dans un fil de rotor. Le flux de polarisation et sa résistance magnétique, dans ce cas, ne dépendent pas de l'emplacement de la partie mobile du moteur.
Pour déplacer un objet dans un plan selon deux coordonnées, des moteurs de type bicoordonnées sont utilisés.
La suspension pneumatique magnétique est également utilisée dans les moteurs linéaires. En raison de la force d'attraction magnétique, le rotor est attiré vers le stator. Plus loin de l'air est soufflé sous le rotor à travers les buses sous une forme comprimée, à la suite de quoi une force apparaît qui repousse le rotor du stator. Ainsi, entre eux, il y a un coussin d'air et le rotor est suspendu au-dessus du stator avec un écart minimum. Cela offre une résistance minimale au mouvement du rotor et un positionnement de haute précision.
 Le variateur est capable de fonctionner de manière stable à condition qu'il n'y ait pas de perte de pas pendant le traitement des coins lorsque des trains d'impulsions sont appliqués aux enroulements de commande. A chaque étape le rotor a un équilibre sûr par rapport au vecteur d'induction magnétique lié à champ magnétique stator.
Le variateur est capable de fonctionner de manière stable à condition qu'il n'y ait pas de perte de pas pendant le traitement des coins lorsque des trains d'impulsions sont appliqués aux enroulements de commande. A chaque étape le rotor a un équilibre sûr par rapport au vecteur d'induction magnétique lié à champ magnétique stator.
Le mode de traitement de chaque pas doit correspondre au nombre d'impulsions de commande qui sont appliquées aux enroulements moteurs, et en même temps, jusqu'à l'arrivée de l'impulsion suivante, il doit calculer l'angle de rotation qui lui est donné. Au début de chaque pas, la vitesse angulaire du moteur doit être nulle.
Les oscillations de l'arbre d'entraînement angulaire par rapport à la valeur établie sont autorisées. Ils sont causés par la présence d'énergie cinétique, qui est accumulée par l'arbre du moteur lors de la sortie du coin. Dans ce cas, l'énergie qui peut être convertie en pertes :
- magnétique;
- mécanique;
- électrique.
Plus leur valeur est élevée, plus le processus de transition consistant à exécuter une étape par les extrémités du lecteur est rapide.
Au démarrage, le rotor peut être en retard sur le flux du stator d'un pas ou même plus, ce qui entraîne un écart entre le nombre de pas du rotor et le flux du stator.
Les principales caractéristiques d'un moteur pas à pas sont :
- caractéristique mécanique ultime ;
- Récupérer.
La caractéristique limite est la dépendance du couple de synchronisation maximal possible aux fréquences des impulsions de commande.
Et la reprise correspond à la fréquence de ces impulsions, ce qui élimine la possibilité de perte ou d'ajout d'une étape lors du traitement. Ramasser considéré comme un indicateur clé mode de transition dans le moteur. Il est capable de croître avec le couple de synchronisation, la réduction du pas, le moment d'inertie des particules déplacées ou tournées linéairement, ainsi que le moment de résistance statique.
Caractéristiques de connexion d'un moteur pas à pas
 Vous pouvez connecter un moteur de type pas à pas selon l'un ou l'autre schéma, qui dépend du nombre de fils et des méthodes de démarrage.
Vous pouvez connecter un moteur de type pas à pas selon l'un ou l'autre schéma, qui dépend du nombre de fils et des méthodes de démarrage.
Les moteurs peuvent avoir quatre à huit fils. S'il n'y en a que quatre, l'utilisation du moteur n'est possible qu'avec un appareil bipolaire. Chaque enroulement de phase, dont il n'y en a que deux, est équipé de deux fils. Les paires câblées doivent être déterminées à l'aide d'un compteur, puis le pilote est connecté étape par étape.
Le moteur, équipé de six fils, comprend deux fils pour chaque enroulement et une prise centrale, également pour chacun d'eux. Il peut être connecté à des appareils unipolaires et bipolaires. Pour entraînement divisé un dispositif spécial doit être utilisé. pour mesurer. À un appareil unipolaire, le variateur peut être connecté à l'aide des six fils, et à un appareil unipolaire, une extrémité et une prise centrale de chaque enroulement suffiront.
Le moteur à cinq fils ne diffère pratiquement pas du précédent, cependant, ses bornes centrales sont connectées de l'intérieur comme un câble solide et ont une sortie vers l'un des fils. Ne séparez pas les enroulements les uns des autres, sinon vous risquez de les casser. Au lieu de cela, il est préférable d'identifier le centre du fil et de le connecter à d'autres conducteurs, ce sera la solution de connexion la plus efficace. Après cela, vous pouvez connecter l'appareil lui-même et vérifier son fonctionnement.
Principales spécifications du moteur
 L'enroulement primaire à courant continu crée Tension nominale. Et la vitesse initiale du couple moteur varie avec le courant. Le temps de réduction du couple linéaire à des vitesses plus élevées dépend de ce qu'est le circuit du moteur et de l'inductance de ses enroulements. Certaines marques de moteurs avec protection IP65 sont capables de fonctionner dans les conditions les plus difficiles.
L'enroulement primaire à courant continu crée Tension nominale. Et la vitesse initiale du couple moteur varie avec le courant. Le temps de réduction du couple linéaire à des vitesses plus élevées dépend de ce qu'est le circuit du moteur et de l'inductance de ses enroulements. Certaines marques de moteurs avec protection IP65 sont capables de fonctionner dans les conditions les plus difficiles.
Si vous souhaitez choisir un modèle de moteur pas à pas prêt à l'emploi de production nationale, attention aux principales caractéristiques techniques les modèles les plus connus :
- ShD-1 - le degré de pas est de 15, 4 phases, le couple est de 40 Nt ;
- DSh-0,04A - pas de degré 22,5, 4 phases, couple 100 Nt ;
- DSHI 200 - pas de 1,8 degrés, 4 phases, couple 0,25 Nt ;
- DSh-6 - degré de pas - 18, 4 phases, couple 2300 Nt.
Les modèles tels que:
- DShR-40 à quatre phases ;
- SM-200-0.22 ;
- R&D Purelogic avec encodeur ;
- NEMA 23 ;
- STH-39D1112 ;
- SP-57 ;
- SanyoDenkiSM28.
Lors de la sélection moteur souhaité, il faut calculer les paramètres de puissance, de tension et de couple.
L'un des problèmes liés au fonctionnement d'un moteur pas à pas est le contrôle des appareils en l'absence de contrôleur. Pour faire face à cela, vous devez prendre un bloc de connexion logique spécial, qui aide à contrôler le moteur en l'absence d'un microcircuit approprié. Cependant, il est préférable de contrôler le fonctionnement des moteurs pas à pas à l'aide d'un contrôleur spécial.
Le coût moyen d'un moteur pas à pas dans les grandes villes de Russie et d'Ukraine
Le coût de cet appareil dépend directement d'indicateurs tels que:

Le coût moyen d'un moteur pas à pas unipolaire est de :
- Moscou - 3000 USD;
- Saint-Pétersbourg - 3500 USD;
- Kyiv - 3500 USD ;
- Kharkiv - 4000 cu.
Nous avons donc expliqué ce qu'est un moteur pas à pas, sur quel principe il fonctionne, dans quelles catégories il est divisé et de quelles propriétés il diffère. Nous espérons que cela vous permettra de choisir plus facilement quand vous devez acheter cet appareil.
Page 3
Les principales dimensions et caractéristiques des essieux de traction VNIIPTmash sont indiquées dans le tableau. 6.2. En remplaçant le moteur électrique à quatre pôles par un moteur électrique à deux pôles à bride avec un frein électromagnétique intégré, la vitesse du chariot peut être augmentée de 2 fois, et lors de l'utilisation de moteurs électriques à nombre variable de pôles, deux étapes de fonctionnement des vitesses peuvent être obtenues.
| Le schéma du cluster souterrain. |
Dans les installations de pompes électriques à vis submersibles, des moteurs électriques à quatre pôles avec une vitesse d'arbre de 1500 tr/min (synchrone) sont utilisés, et dans les installations de pompes électriques centrifuges submersibles, des moteurs électriques à deux pôles avec une vitesse d'arbre de 3000 tr/min sont utilisés.
Tous ces compresseurs sont monocylindres, ont un diamètre de cylindre de 36 mm, un code piston de 19 mm, un volume décrit par le piston, 0,87 dm3 - s. Des moteurs électriques bipolaires triphasés AVK2 - 0 7 sont utilisés; AEC2 - 0,7 et AEC2 - 1 (respectivement), dont les caractéristiques sont données dans le tableau. V-14.
EPU dispose d'un mécanisme de contrôle automatique du ramassage. L'EPU fonctionne à partir d'un moteur électrique bipolaire monophasé asynchrone Avec démarrage par condensateur Vitesse du rotor 2800 tr/min. Pour réduire le bruit de fond, le moteur électrique est enfermé dans un écran en permalloy.
Si, par exemple, il y a 12 fentes dans le stator d'un moteur électrique bipolaire, alors il y a six fentes par pôle, et ces six fentes doivent accueillir les côtés des bobines des trois phases qui créent ce pôle. Par conséquent, lors de la conception et de l'élaboration de circuits d'enroulement, le nombre d'encoches par pôle et par phase est une valeur caractéristique et décisive.
Moteurs électriques ventilés protégés et fermés avec les mêmes valeurs la puissance et la vitesse de rotation ont les mêmes dimensions d'installation. L'exception à cela règle générale sont des moteurs électriques bipolaires dans une conception fermée et ventilée, dans lesquels la puissance est inférieure d'un cran à celle des moteurs électriques dans une conception protégée. Dans le même temps, pour les moteurs électriques bipolaires A et AO de dimensions 6, 7, 8 et 9 à une puissance de 14, 28, 55 et 100 kW, les dimensions d'installation sont les mêmes.
Nous commençons le calcul avec les moteurs à courant continu, car leur calcul est plus simple et plus clair que les moteurs à courant alternatif. Voici une explication détaillée de toutes les valeurs calculées, que l'on retrouvera ensuite dans les moteurs à courant alternatif. Le calcul est donné pour des moteurs électriques bipolaires à excitation série.
Des pompes électriques à vis sont également utilisées, qui ne diffèrent pas extérieurement des ESP conventionnels. Dans ce cas, le pétrole des puits à la surface est fourni non pas par une pompe centrifuge, mais par une pompe à vis (monovis). Dans de telles pompes, des moteurs électriques synchrones à quatre pôles avec une vitesse d'arbre de 1500 tr/min sont utilisés, et dans les ESP conventionnels, des moteurs électriques à deux pôles avec une vitesse d'arbre de 3000 tr/min sont utilisés.
Les balais doivent être pressés contre la surface du collecteur. C'est à cela que servent les porte-balais. Un ressort spiral en fil fin est placé au-dessus de la brosse. Un capuchon 5 est vissé sur le dessus du tube, ce qui empêche la brosse et le ressort de tomber hors du tube. Le porte-balais est enfoncé dans la paroi du carter du moteur. Dans un moteur bipolaire, il doit y avoir deux porte-balais avec balais. Ils doivent être installés de manière à ce que les balais soient entre les pôles du système magnétique du moteur électrique. Les porte-balais doivent être isolés les uns des autres et du carter du moteur. Pour drainer le courant, un conducteur isolé doit être vissé ou soudé au porte-balais.