かご型誘導電動機とは。 非同期モーター
電気自動車、変換中 電気エネルギー 交流電流機械エネルギーへの変換は AC モーターと呼ばれます。
業界では、最も普及している 非同期モーター 三相電流.これらのエンジンの装置と動作原理を考えてみましょう。
非同期モーターの動作原理は、回転の使用に基づいています 磁場.
このようなエンジンの動作を理解するために、次の実験を行います。
ハンドルで回転できるように、馬蹄形磁石を軸に固定します。 磁石の極の間に、自由に回転できる銅の円柱を軸に配置します。
図 1. 回転磁場を得るための最も単純なモデル
ハンドルで磁石を時計回りに回転させてみましょう。 磁石の磁場も回転し始め、回転中にその力線で銅のシリンダーを横切ります。 シリンダーでは、電磁誘導の法則に従って、渦電流が発生し、それが独自の磁場、つまりシリンダーの磁場を作り出します。 この磁場は永久磁石の磁場と相互作用し、シリンダーを磁石と同じ方向に回転させます。
円筒の回転速度は、磁場の回転速度よりもわずかに遅いことが確立されています。
実際、シリンダーが磁場と同じ速度で回転する場合、磁力線はそれを横切らないため、シリンダーに渦電流が発生せず、シリンダーが回転します。
磁場の回転速度は通常、磁石の回転速度と等しいため同期と呼ばれ、シリンダーの回転速度は非同期(非同期)と呼ばれます。 したがって、モーター自体は誘導モーターと呼ばれていました。 シリンダー(ローター)の回転速度は、磁場の同期回転速度とわずかに異なります。これはスリップと呼ばれます。
ローターの回転速度を n1 で、フィールドの回転速度を n で表すと、次の式を使用してスリップ量をパーセントで計算できます。
s = (n - n1) / n.
上記の実験では、永久磁石の回転により回転磁場とそれによって引き起こされる円筒の回転が得られたため、そのようなデバイスはまだ電気モーターではありません。 お奨めの力 電気回転磁場を作り、それを使ってローターを回転させます。 この課題は、M. O. Dolivo-Dobrovolsky によって見事に解決されました。 彼は、この目的のために三相電流を使用することを提案しました。
非同期電気モーターの装置 M. O. Dolivo-Dobrovolsky
図 2. 非同期電気モーター Dolivo-Dobrovolsky のスキーム
電気モーターの固定子と呼ばれる環状鉄心の極に 3 つの巻線が配置され、3 相電流ネットワークは 120 ° の角度で互いに配置されています。
コアの内側には、電気モーターのローターと呼ばれる軸に金属製のシリンダーが固定されています。
図に示すように巻線が相互に接続され、三相電流ネットワークに接続されている場合、3 つの極によって生成される全磁束が回転することがわかります。
図3は、モータ巻線の電流変化と回転磁界発生過程をグラフ化したものです。
このプロセスを詳しく見てみましょう。
図 3. 回転磁場の取得
グラフの位置「A」では、第 1 フェーズの電流はゼロ、第 2 フェーズでは負、第 3 フェーズでは正です。 極コイルを流れる電流は、図の矢印の方向に流れます。
電流によって生成される磁束の方向を右手の法則によって決定したので、S 極 (S) が 3 番目のコイルの (回転子に面する) 極の内側の端に作成されることを確認します。 2 番目のコイルの極に N 極 (C) が作成されます。 全磁束は、2 番目のコイルの極から回転子を通って 3 番目のコイルの極に向けられます。
グラフの位置「B」では、第 2 フェーズの電流はゼロ、第 1 フェーズでは正、第 3 フェーズでは負です。 極コイルを流れる電流は、最初のコイルの端に S 極 (S) を作成し、3 番目のコイルの端に N 極 (C) を作成します。 全磁束は、3 番目の極から回転子を通って最初の極に向けられます。つまり、極は 120°移動します。
グラフの位置「B」では、第 3 フェーズの電流はゼロ、第 2 フェーズでは正、第 1 フェーズでは負です。 ここで、1 番目と 2 番目のコイルを流れる電流は、1 番目のコイルの極の端に N 極 (C) を作成し、2 番目のコイルの極の端に S 極 (S) を作成します。全磁場の 120 ° 移動します。 グラフの「G」の位置では、磁場はさらに 120 °移動します。
したがって、固定子巻線(極)の電流の方向が変化すると、全磁束の方向が変化します。
この場合、巻線の電流変化の 1 周期で、磁束は完全に 1 回転します。 回転磁束はシリンダーを引きずります。このようにして、 非同期電動機.
図 3 では固定子巻線が「星」で接続されていることを思い出してください。ただし、「三角形」で接続されている場合も回転磁界が形成されます。
第 2 相と第 3 相の巻線を入れ替えると、磁束の回転方向が逆になります。
固定子巻線を交換せずに、ネットワークの第 2 相の電流を固定子の第 3 相に、ネットワークの第 3 相の電流を固定子の第 2 相に流すことによって、同じ結果を得ることができます。
このように、任意の2相を切り替えることにより、磁場の回転方向を変えることができる。
固定子に 3 つの巻線を備えた非同期モーターのデバイスを検討しました。 この場合、回転磁界はバイポーラであり、1 秒間の回転数は 1 秒間の電流変化周期の数に等しくなります。
固定子の周囲に 6 つの巻線を配置すると、4 極の回転磁界が発生します。 巻線が 9 個の場合、フィールドは 6 極になります。
三相電流周波数 f が 1 秒あたり 50 周期、または 1 分間あたり 3000 に等しい場合、1 分間あたりの回転磁場の回転数 n は次のようになります。
二極固定子 n \u003d (50 x 60) / 1 \u003d 3000 rpm、
4極固定子n \u003d(50 x 60)/ 2 \u003d 1500 rpm、
6極固定子n \u003d(50 x 60)/ 3 \u003d 1000 rpm、
固定子極の対の数が p に等しい場合: n = (f x 60) / p、
そのため、磁場の回転速度と、モーターステーターの巻線数への依存性を確立しました。
エンジンのローターは、ご存じのとおり、回転がやや遅れます。
ただし、ローターラグは非常に小さいです。 たとえば、 アイドリングエンジン、速度の差はわずか 3%、負荷は 5 ~ 7% です。 その結果、誘導電動機の速度は、負荷が変化したときに非常に小さな制限内で変化します。これは、その利点の 1 つです。
非同期電気モーターのデバイスを考えてみましょう
最新の非同期電気モーターの固定子には、表現されていない極があります。つまり、固定子の内面は完全に滑らかに作られています。
渦電流損失を低減するために、ステータコアは薄いプレス鋼板で作られています。 組み立てられたステータコアはスチールケースに固定されています。
銅線巻線が固定子スロットに配置されています。 電気モーターの固定子の相巻線は、「星」または「三角形」によって接続され、巻線のすべての始点と終点がハウジング、つまり特別な絶縁シールドに接続されます。 このような固定子装置は、さまざまな標準電圧で巻線をオンにできるため、非常に便利です。
誘導電動機の回転子は、固定子と同様に、打ち抜かれた鋼板から組み立てられます。 巻線はローターの溝に配置されます。
ローターの設計に応じて、非同期電気モーターはかご型ローターと位相ローターを備えたモーターに分けられます。
かご形ローターの巻線は、ローターの溝に配置された銅の棒でできています。 ロッドの端は銅リングで接続されています。 このような巻き方を「かご巻き」と呼びます。 溝の銅棒は絶縁されていないことに注意してください。
一部のエンジンでは、「リスケージ」がキャストローターに置き換えられています。
フェーズローター(スリップリング付き)を備えた非同期モーターは、通常、高出力の電気モーターで使用されます。 発進時に電気モーターが大きな力を発生させる必要がある場合。 これは、巻線の 相モーター開始レオスタットがオンになります。
かご形誘導電動機は、次の 2 つの方法で始動します。
1) 直結 三相電圧モーター固定子へのネットワーク。 この方法は、最も簡単で最も一般的な方法です。
2) 固定子巻線に供給される電圧を下げる。 電圧は、たとえば、固定子巻線をスターからデルタに切り替えることによって減少します。
ステーター巻線がスター結線された状態でエンジンが始動し、ローターが通常の速度に達するとステーター巻線がデルタ結線に切り替わります。
エンジンを始動するこの方法での電源ワイヤの電流は、「デルタ」によって接続された固定子巻線を使用してネットワークに直接接続してエンジンを始動するときに発生する電流と比較して、3 分の 1 に減少します。 ただし、この方法は、巻線が「三角形」に接続されている場合にステータが通常の動作用に設計されている場合にのみ適しています。
最も単純で、最も安価で信頼性の高いのは、かご形の非同期モーターですが、このモーターには、起動力が低く、起動電流が大きいという欠点があります。 これらの欠点は、位相回転子を使用することによって大幅に解消されますが、そのような回転子を使用すると、エンジンのコストが大幅に増加し、始動加減抵抗器が必要になります。
動作原理
非同期電気モーターの動作原理は、ローターの誘導電流とステーターの磁束との相互作用に基づいています。 巻き上げ時 三相モーター三相交流電源の電圧下では、固定子ボア内に回転磁界が形成され、その回転周波数は
n1=60fp
ここで、n1 は磁場の回転数 rpm です。 f - 現在の周波数、Hz; p はモーターの磁極の対の数です。
回転磁界の力線は、ローターの短絡巻線のロッドを横切り、そこにEMFが誘導され、モーターローターに電流と磁束が現れます。
ステータの磁場とロータの磁束との相互作用により、機械的なトルクが発生し、その影響を受けてロータが回転し始めます。 回転子の速度は、磁場の速度よりわずかに遅くなります。 したがって、モーターは非同期と呼ばれます。
相対単位での磁場からの回転子の遅れを特徴付ける値はスリップと呼ばれ、次の式で計算されます
S = (n1−n2)/n1、
どこで S - スリップ (相対 角速度); n1 - 磁場の回転数、rpm; n2 - 公称ローター速度、rpm。
モーターをネットワークに接続するには、その固定子巻線を「スター」または「デルタ」に接続する必要があります。
米。 4 接続図:
a - 三角形、b - 星。
「三角形」スキームに従ってエンジンをオンにするには、最初の巻き始めを2番目の終わりに、2番目の巻き始めを3番目の終わりに、3番目の巻き始めを接続する必要があります最初の終わり。 巻線の接続点は、ネットワークの3つのフェーズに接続されています(図4、a)。
「スター」スキームに従ってエンジンをネットワークに接続するには、巻線のすべての端を電気的に1点に接続し、巻線のすべての始点をネットワークのフェーズに接続する必要があります(図4) 、b)。
配線図は、モーター端子ボックスを閉じるカバーの裏側に常に表示されています。
三相非同期モーターの回転方向を変更するには、モーターのスイッチング回路に関係なく、ネットワークの任意の 2 つのフェーズを交換するだけで十分です。 モーターの回転方向をすばやく変更するには、反転スイッチ、バッチスイッチ、または反転磁気スターターが使用されます。
かご型ローターを備えた三相非同期電気モーターには、設計の単純さ、動作の高い信頼性、耐久性、低コスト、および汎用性に加えて、重大な欠点が 1 つあります。始動時に突入電流が発生し、これは 5~7回公称以上。 大始動電流 電気ネットワーク通常は計算されませんが、電圧が大幅に低下し、隣接する電気受信機の安定した動作に悪影響を及ぼします。
高出力三相非同期かご形モーターの始動電流を減らすために、それらはスターからデルタへの回路スイッチを使用してオンにされます。 この場合、最初にモーター巻線が「スター」スキームに従って接続され、次にモーターローターが定格速度に達した後、その巻線が「トライアングル」スキームに切り替えられます。
却下 始動電流モーターの巻線をスターからデルタに切り替えると、特定の主電源電圧を対象とした「三角形」回路の代わりに、各モーター巻線が √3 分の 1 の電圧でオンになり、消費される電流が 1 分の 1 に減少するためです。 3つ。 始動時に電気モーターによって生成される出力も 3 分の 1 に減少します。 したがって、上記の始動電流の低減方法は、定格の 1/3 以下の負荷でのみ使用できます。
非同期機は AC 電気機械であり、その回転子速度は固定子巻線電流によって生成される磁場の速度と等しくありません (モーター モードでは小さい)。
多くの国では、整流子機も非同期機として分類されています。 非同期機の 2 番目の名前は、回転子巻線の電流が固定子の回転磁界によって誘導されるという事実による誘導です。 今日の非同期機は、電気機械の大部分を占めています。 それらは主に電気モーターとして使用され、電気エネルギーを機械エネルギーに変換する主要なコンバーターです。
利点: 製造が簡単. 機械の静的部分との機械的接触がありません.
短所: 始動トルクが小さい. 始動電流が大きい.
非同期機には、エア ギャップで分離された固定子と回転子があります。 そのアクティブな部分は、巻線と磁気回路 (コア) です。 他のすべての部品は構造的であり、必要な強度、剛性、冷却、回転の可能性などを提供します。
固定子巻線は三相(一般に多相)巻線であり、その導体は固定子の周囲に均等に配置され、120 el. deg. の角度距離で溝に段階ごとに配置されます。 固定子巻線の相は、標準の「三角形」または「星」方式に従って接続され、三相電流ネットワークに接続されます。 ステータ磁気回路は、ステータ巻線の電流を変更する過程で再磁化されるため、磁気損失を最小限に抑えるために電磁鋼板から採用されています。 磁気回路をパッケージに組み込む主な方法はブレンディングです。
ローターの設計によると、非同期機は、かご型ローターと位相ローターの 2 つの主なタイプに分けられます。 どちらのタイプも固定子の設計は同じで、回転子巻線の設計のみが異なります。 ローターの磁気回路は、ステーターの磁気回路と同様に電気鋼板で作られています。
動作原理
固定子巻線に電圧が印加され、その作用でこれらの巻線に電流が流れ、回転磁界が生成されます。 磁場は回転子巻線に作用し、電磁誘導の法則に従って、それらに EMF を誘導します。 ローター巻線では、誘導されたEMFの作用で電流が発生します。 回転子巻線の電流は独自の磁場を作成し、固定子の回転磁場と相互作用します。 その結果、ローター磁気回路の各歯に力が作用し、円周方向に合計されて、ローターを回転させる回転電磁モーメントが発生します。
電気モーターの中で最も普及していたのは、有名なロシアの電気技師 M. O. Dolivo-Dobrovolsky によって最初に設計された三相非同期モーターでした。
非同期モーターは、そのシンプルな設計とメンテナンスのしやすさが特徴です。 他の AC マシンと同様に、誘導モーターは 2 つの主要部分で構成されています。 ステーターとローター。 固定子は機械の静止部分であり、回転子は回転部分です。 非同期マシンには、可逆性の特性があります。つまり、ジェネレーター モードとエンジン モードの両方で使用できます。 多くの重大な欠点があるため、非同期発電機はほとんど使用されていませんが、前述のように非同期モーターは非常に普及しています。
したがって、エンジンモードでの非同期機の動作、つまり電気エネルギーを機械エネルギーに変換するプロセスを検討します。
多相 AC 巻線は回転磁界を生成し、その回転速度は毎分
ローターが磁場の回転速度に等しい速度n2で回転する場合(n2 = n1)、この速度は同期と呼ばれます。
ローターが磁場の回転速度と等しくない速度で回転する場合( n2n1 )、この速度は非同期と呼ばれます。
非同期モーターでは、作業プロセスは非同期速度、つまり、磁場の回転速度と等しくないローターの回転速度でのみ進行できます。
ローターの速度はジュールの速度とほとんど変わらないかもしれませんが、エンジンが作動しているときは常に遅くなります (n2 誘導電動機の動作は、アラゴ・レンツ・ディスクと呼ばれる現象に基づいています (図 108)。 この現象は次のとおりです。銅ディスク 1 を永久磁石の極の前に置き、軸 2 に自由に座って、ハンドルでその軸の周りに磁石を回転させ始めると、銅ディスクは同じ方向に回転します。方向。 これは、磁石が回転すると、その磁場の磁力線が北極から南に閉じてディスクを貫通し、渦電流と磁気との相互作用の結果として、ディスクに渦電流を誘導するという事実によって説明されます。磁石の磁場、ディスクを回転させる力が発生します。 レンツの法則に基づいて、誘導電流の方向は、それを引き起こした原因に逆らう方向になります。 したがって、ディスク本体の渦電流は磁石の回転を遅らせる傾向がありますが、それができないため、ディスクは磁石に追従するように回転します。 この場合、ディスクの回転速度は常に磁石の回転速度よりも遅くなります。 何らかの理由でこれらの速度が同じになった場合、磁気リーシュはディスクを横切らず、その結果、渦電流が発生しません。 非同期モーターでは、永久磁石は、交流ネットワークに接続されたときに三相固定子巻線によって生成される回転磁界に置き換えられます。 固定子の回転磁界は、回転子巻線の導体を横切り、それらに起電力を誘導します。 と。 回転子巻線が抵抗に対して閉じているか、短絡している場合、 誘導されたeの影響下で。 d.s. 電流が流れます。 その結果、トルクがステータ巻線フィールドによって生成され、その影響下でロータが回転し始めます。 たとえば、巻線の 1 つの導体がある回転子の円周の一部を選択してみましょう。 固定子磁場は北極 N で表され、空間内で回転子の周りを毎分 N 回転数 N で時計回りに回転します。 その結果、極Nは回転子巻線の導体に対して左から右に移動し、その結果、この導体に起電力が誘導されます。 右手の法則に従って、視聴者に向けられます(記号「ドット」)。 ローター巻線が閉じている場合は、eのアクションの下で。 d.s. 電流がこの巻線を通って流れ、選択した導体に向けられ、視聴者にも向けられます。 回転子巻線の導体内の電流と磁場との相互作用の結果として、力 F が発生し、左手の法則によって決定される方向、つまり左から右に導体を移動させます。 導体とともにローターも動き出す。 回転子巻線の導体に作用する力 F に、回転子の軸からこの導体までの距離 (力の負荷) を掛けると、この導体の電流によって発生するトルクが得られます。 ローターには多数の導体が配置されているため、ローター軸からこれらの導体までの距離で各導体に作用する力の積の合計が、エンジンによって発生するトルクを決定します。 トルクの作用下で、ローターは磁場の回転方向に回転します。 したがって、モータを逆転させる、つまりロータの回転方向を変えるには、ステータ巻線によって生成される磁場の回転方向を変える必要があります。 これは、固定子巻線の位相シーケンスを変更することによって実現されます。 そのためには、ネットワーク端子に関して、固定子巻線をネットワークに接続する 3 本のワイヤのうち任意の 2 本を交換する必要があります。 可逆モーターにはスイッチが装備されており、これを使用して固定子巻線の相順を変更できるため、回転子の回転方向を変更できます。 回転子の回転方向に関係なく、回転子の速度 n2 は、既に述べたように、常に固定子磁場の速度よりも小さくなります。 ある時点で、回転子の回転数が固定子磁場の回転数に等しいことが判明したと仮定すると、回転子巻線の導体は固定子磁場の磁力線と交差せず、ローターには電流が流れません。 この場合、モーメントの合計である制動トルクと釣り合うトルクが発生するまで、トルクはゼロに等しくなり、ローターの回転速度はステーター フィールドの回転速度と比較して減少します。 シャフトの負荷と機械の摩擦力のモーメント。 既存の電気モーターの中で最も人気があるのは、19 世紀に作成された非同期モーターです。 その設計は巧妙に単純であることが判明したため、それ以降のすべての変更は動作原理には関係なく、特定の部品の製造技術にのみ影響を与えました。 たとえば、モーターシャフトが取り付けられているベアリングを変更したり、ローターとステーターの巻線の形状を変更したりできましたが、非同期モーターの動作原理は同じままでした。 このタイプの電気モーターの寸法に関係なく、そのデバイスは同じになります。 例として考えるとわかりやすい 三相電動機. このようなモーターは、工場のフロアで動作します - コンベアや工作機械で、エレベータカーを動かします - 家屋や鉱山で、ポンプタービンを回して水を汲み上げます - 小さな井戸と強力な取水ステーションの両方で。 三相デバイスの範囲は広いです。 最初に誕生したのは三相電気モーターで、その動作原理が構築されました 電磁場の相互作用について. 誘導電動機の主要部分は固定子と回転子です。 そこで動かない部分をステーターと呼んだ。 デバイスの外殻の真下にあり、円柱の形をしているのは彼女です。 この部分では、3つの巻線が円状に配置されています-互いに120°の角度です。 最新のモーターでは、多くの巻線を数えることができますが、それらは互いに接続されているため、連続する巻線は前の巻線と位相が異なり、隣接する巻線間の位相シフトは120°です。 巻線は銅線で巻かれ、その相からの電圧が各グループに接続されます。 したがって、磁場はこれらの巻線に沿って、まるでリングで閉じているかのように移動することがわかります。 固定子にも独自の巻線があります。 固定子には電気が供給されていないため、 閉導体、巻線の代わりにいわゆるリスケージの形で形成されることもあります。 より正確に言えば、このディテールは機敏な齧歯動物の檻自体に似ているのではなく、動物が抑制できないエネルギーを飛び散らせるように設計されたリスの車輪に似ています。 装置のローターでは、型抜きされた鋼板で作られたコアの溝に溶融アルミニウムを流し込むことによって「リスのかご」が形成されます。 このような装置はリスケージローターと呼ばれます。 固定子が実際の巻線で作られている場合、通常は多極に作られています。 このような回転子は位相回転子と呼ばれます。 このローターの巻線は、星または三角形で閉じられています。 ローターには独自のシャフトがあり、前後のベアリングで支えられています。 彼らは、順番に、 モーターハウジングに取り付けたステーター内のローターが自由に回転できるようにします。 非同期モーターの動作原理は、ステーターによって巻線または「リスホイール」に磁場が誘導されるという事実に基づいています。 その作用の下で、ローターの導体に電流が現れ、それとともに独自の磁場が発生します。 ステーターの交番磁界がローターを引きずり、回転し始めます。 しかし、回転子の磁場は固定子の磁場に対して常に遅れており、両方の磁場の回転は同期して発生することはできません。 これにより、ローターはそれに作用する多くの力を克服します。 後者の力は多くのモーメントに依存するため、単純な物理パラメータに還元することはできません。 トラムを動かす必要がある場合は、エンジンが引き継ぐ必要があります ギア負荷、移動する必要がある車自体から、ねじれを解く必要があるだけでなく、車両の車輪が経験する転がり摩擦力を忘れてはなりません。 非同期モーターで駆動されるプロの肉挽き器の作業の説明がある場合、ギアボックス自体の抵抗、および挽く必要がある肉片または骨さえもここで克服されます. 固定子と回転子の間には隙間があるため、負荷がかかった状態の回転子は、角速度に関して固定子より単純に遅れます。 したがって、回転子の速度はモーター シャフトの負荷に依存します。 同期の原則に違反しているため、デバイス自体の名前は「非同期モーター」です。 非同期モーターに組み込まれた動作原理 多くの利点をもたらしますこの装置: この設計の電気モーターにも欠点があります。 これらには、熱損失が含まれます。 彼らは本当に 過熱する可能性があります特に負荷がかかる。 これを行うために、それらのケースはしばしばリブ付きになり、周囲の空間に熱をよりよく放射します。 また、非同期デバイスには、多くの場合、同じシャフトに座ってローターを吹き飛ばすファンが装備されています。これは、ローターについては言えませんが、ステーターとの間にエアギャップがないため、ハウジングはステーターからのみ熱を除去できるためです。 回転速度を安定に保つことができないため、一部のデバイスでは非同期モーターを適用できません。 固定子には 90° の角度で 2 つの巻線があります。 コイルの両方のグループは同じ位相に接続されていますが、巻線間で同じ 90° シフトを確保するために、それらの 1 つがコンデンサを介して接続されています。 これにより、磁場が回転します。 同様のモーターは、コーヒーグラインダーやジューサーなどで使用されています。 変化が聞こえる 誘導モーター音これらのデバイスに負荷がかかっているとき。 アイドリング時のローター速度は明らかに高いです。 要約すると、非同期電気モーターが非常に人気を博していると言うことが重要です。 もちろん、いくつかの欠点を忘れてはなりません。 ただし、非常に多くの利点があるため、それらはすべて重複しています。
非同期モーターはモーターと呼ばれ、3 相電流が巻線を通過するときに、ローターの速度がステーターの磁場の速度よりも遅れます。 三相電流が三相機の固定子巻線を通過すると、回転磁界が発生し、その影響で回転子に電流が誘導されます。 固定子の回転磁界と回転子導体に誘導される電流との相互作用の結果として、通電導体に作用する機械力が発生し、回転子を動かすトルクが発生します。 同時に、非同期モーターのローター速度は、最新のエンジンでは約 2 ~ 5% であるローターのスリップにより、常にステーターの回転磁界の速度よりも遅くなります。 したがって、誘導モーターは、エネルギーがワイヤを介して供給される DC モーターとは異なり、回転磁束によって (誘導的に) 回転子に供給されるエネルギーを受け取ります。 非同期モーターは、同期モーターとは異なり、交流によって励起されます。 非同期モーターは、同期モーターと同様に、2 つの主要部分で構成されています。3 相交流電流が流れる相巻線を備えた固定子と、軸がベアリングに配置されている回転子です。 ローターは短絡して位相を合わせることができます (図 170)。 リスケージローター(図170、 の)円周に沿って導体がその軸に平行に配置され、ローターの両側でリングによって互いに閉じられている円柱を表します(リスホイールの形で)。 このようなローターを備えた非同期モーターは、かご型モーターと呼ばれます。 その短所には、始動トルクが低いこと、および始動時の固定子巻線の電流が大きいことが含まれます。 始動トルクを増やしたい場合、または始動電流を減らしたい場合は、位相回転子を備えた非同期モーターを使用します (図 170、 G)。これらのモーターは、ローターとステーターに同じ巻線を持っています。 この場合、巻線の端はスリップリングに接続されています(図170、 e)モーターシャフトにあります。 接触リングは、ブラシを使用して始動レオスタットに接続されています。 エンジンを始動するために、電源回路にステーターが含まれ、その後、始動用レオスタットの抵抗がローター回路から徐々に取り除かれます。 エンジンが始動すると、スターターの接点によって接点リングが短絡され、 位相回転子を備えた非同期電気モーターの縦断面 図上。 図171は、相回転子を有する誘導電動機の縦断面を示す。 万一に備えて 6
固定子巻線5が配置され、溝に配置されます 4
ステーター鋼。 溝に 2
スチールローターは巻き上げ 3
ローター。 かご型ローターを備えた電気モーターの始動は、回路の全動作電圧でスターターを直接オンにすることで実行できます(ダイレクトスタート方式)。 ただし、誘導された e の急激な増加により。 d.s. および始動電流、始動時のターゲットの電圧が低下し、駆動モーターの動作やこの回路によって電力を供給される他の消費者に悪影響を及ぼします。 始動電流が大きい場合、それを減らすために、かご形回転子を備えた非同期モーターは、通常、2 つの方法で始動します。電気モーターの通常の動作中にデルタで接続されるか、またはステーター回路の始動加減抵抗器 (または単巻変圧器) を介して電気モーターをオンにします。 コンタクタをオフにすることでモーターを停止します。 モーターが停止した後、始動用加減抵抗器または単巻変圧器が完全に作動します。 非同期モーターの回転速度は、ローター回路に含まれるレオスタットの抵抗を変更し(位相ローターを備えた電気モーターの場合)、固定子巻線を切り替えて極対の数を変更することによって調整されます(リスを備えた電気モーターの場合) -ケージローター)。 誘導電動機の回転方向を逆にすることは、固定子巻線の 3 つの相のうちの任意の 2 つを切り替えて (固定子巻線クランプを回路に接続するワイヤを使用して)、回転する固定子磁場の方向を変えることによって達成されます。スイッチ。 非同期モーターは設計がシンプルで、DC モーターに比べて寸法と重量が小さいため、はるかに安価です。 さらに、それらは動作の信頼性が高く、回転式コレクターとブラシ装置がないため、メンテナンス中の注意が少なくて済みます。 それらは効率が高く、制御装置はDCモーターよりもはるかにシンプルで安価です。 非同期モーターは、スイッチが壊れている DC マシンで可能なスパークなしで動作するため、火災の点でより安全です。 記載されている非同期モーターの主な利点は、船舶に交流電流が広く導入されている現在の傾向を説明しています。 業界では、非同期モーターが他のタイプの電気モーターと比較して長い間支配的な地位を獲得してきたことに注意する必要があります。 非同期モーターは、数分の 1 キロワットから数千キロワットまでの電力で構築されています。 船舶は主にかご形ローターを備えた非同期モーターを使用しています。これには、防水バージョンと防滴バージョンがあり、定格は 380/220 V です。 テストの質問: 1. 直流発電機の原理は? 2. 直流電気機械の主要部分とその目的は何ですか? 3. DC マシンは設計によってどのように分類されますか? 4. DC モーターの動作原理は何ですか? 5. 直流電気機械の保守に関する基本的な規則は何ですか? 6.同期と呼ばれるマシンとその動作原理は何ですか? 7.変圧器とは何ですか、その設計と動作原理は何ですか? 8.非同期と呼ばれるモーターとその動作原理は何ですか? 9. 回転子の設計に応じて、非同期モーターはどのように分類されますか? 回転磁束を得るための装置を作成することを可能にした三相交流システムは、非同期と呼ばれる現在最も一般的な電気モーターの出現を引き起こしました。 この名前は、機械の回転部分であるローターが常に磁束の速度と等しくない速度で回転するという事実によるものです。 それと同期していません。 127、220、380、500、600、3000、6000、10,000 V の電圧で、数分の 1 ワットから数千キロワットで製造されたこの電気モーターは、設計がシンプルで、操作が信頼でき、他のタイプに比べて安価です。 一定の回転速度を維持する必要のないあらゆる種類の作業や日常生活で、低電力用の単相バージョンで使用されます。 図 1 に示すデバイスを考えてみましょう。 これは、永久磁石 1、銅ディスク 2、ハンドル 3、ベアリング 4 で構成されています。ハンドルで磁石を回転させると、銅ディスクは同じ方向に回転し始めますが、周波数は低くなります。 銅製のディスクは、無数の閉じたターンと見なすことができます。 磁石 1 が回転すると、その磁力線 (m.s.l.) がディスクのターンを横切り、ターンに起電力が誘導されます。 意味: モーターでは、固定子巻線を流れる三相電流によって回転磁界が生成され、回転子巻線はディスクの役割を果たします。 固定子と回転子のアクティブ スチールは磁気回路として機能し、磁束に対する抵抗を数百分の 1 に減らします。 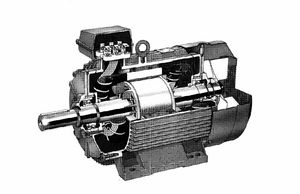
エンジンの種類
三相モーターとは異なり、単相非同期モーターは、掃除機、洗濯機、扇風機、フードプロセッサー、ブレンダーなどの家電製品でよく使用されます。 また、テープレコーダーやビニールディスクプレーヤーにも使用されています。 パソコンの一部であっても、複数の非同期モーターを見つけることができます。 しかし、このバージョンのエンジンのデバイスには少し後で戻ります。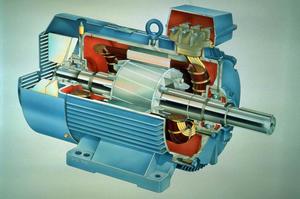
誘導電動機の欠点
単相モーター接続
 私たちの家電製品では、ほとんどの場合、同じ非同期デバイスを見つけることができます。 しかし、1 つのフェーズとゼロだけが開始された場合、開始時にどの方向に回転を開始する必要があるかをどのように「理解」するのでしょうか? このような非同期モーターでは、動作原理は三相モーターと同じです - 磁場の回転. これを行うために、各エンジンにはもう1つの連絡先があります - 始動です。
私たちの家電製品では、ほとんどの場合、同じ非同期デバイスを見つけることができます。 しかし、1 つのフェーズとゼロだけが開始された場合、開始時にどの方向に回転を開始する必要があるかをどのように「理解」するのでしょうか? このような非同期モーターでは、動作原理は三相モーターと同じです - 磁場の回転. これを行うために、各エンジンにはもう1つの連絡先があります - 始動です。
誘導電動機の動作原理
n、 - 磁石の回転周波数(同期周波数)、rpm;
n2 - ディスクの回転数、rpm; n - 磁石とディスクの回転周波数の差、rpm。
ディスクの回転速度は磁石の回転速度よりも遅いため、ディスクは非同期 (非同期) 周波数で回転します。 磁石とディスクの周波数の差が、M.S.L. の周波数です。 ディスクのターンを横切ります。 同期周波数に対する周波数差の比率はスリップと呼ばれます。 スリップは、単位の分数またはパーセンテージで表すことができます。
固定子に印加される本線電圧U1の影響下で、電流Iがその巻線を流れる。 この電流は回転磁束 F を生成し、固定子と回転子を通過します。 この流れにより、両方の巻線に起電力が発生します。 変圧器の一次巻線と二次巻線のように、E(およびE2。したがって、誘導電動機は、起電力が回転磁束によって作成される三相変圧器に似ています。 
米。 2. cos f2 = 1 での非同期モーターの動作
時計の針の方向に流れを回転させます。 emfの影響下で。 回転子巻線電流 I2 の E2 が流れ、その方向を図 1 に示します。 2. E2 と同相であると仮定します。 電流 I2 と流れ Ф の相互作用により、電磁力 F が発生し、回転する流れに従ってロータが回転します。 したがって、非同期モーターは、回転する二次巻線を備えた変圧器であるため、電力 E2I2 cos f を機械力に変換することができます。
この場合にのみ起電力が発生する可能性があるため、回転子は常に回転磁束より遅れます。 E2、したがって電流 12 と力 F. ローターの回転方向を変更するには、流れの回転方向を変更する必要があります。 これを行うには、ネットワークからステータに電流を供給する 2 本のワイヤを交換します。 この場合、一連のフェーズ ABC は ACB または BAC に変わり、流れは反対方向に回転します。
モーターのローターは非同期周波数n2で回転するため、モーターは非同期と呼ばれます。 磁束の回転周波数を同期周波数 n1 と呼びます。 回転数 ![]() ローター
ローター
理論的には、スリップは 1 から 0 または 100% から 0 に変化します。 ローターが流れと同期して回転すると仮定すると、n2 = nx.
シャフトの負荷が大きいほど、回転子速度 n2 が低くなり、その結果、S が大きくなります。これは、より大きなブレーキ トルクをトルクによって釣り合わせる必要があるためです。 後者は、E2 と I2、したがって S が増加した場合にのみ可能です。非同期モーターの定格負荷 SH でのスリップは 1 ~ 7% です。 低い数字は強力なエンジンを表します。