Синхронни постояннотокови двигатели. Голяма енциклопедия на нефта и газа. Синхронни линейни стъпкови двигатели
На един или друг електрически уредработи, изисква специален задвижващ механизъм. Един такъв механизъм е стъпковият двигател. В този материал ще научите какво представлява, какъв е принципът на действие и на какви категории е разделен.
Стъпковият двигател може да бъде униполярен или биполярен. Това е електрически и безчетков постояннотоков двигател, способен да разделя пълен оборот на няколко еднакви стъпки. Той включва следните подробности:
Идеални генератори на ток Един генератор на ток може да бъде представен с този символ, където посоката на стрелката показва посоката на тока: идеален генератор. Компоненти, в които определени електрически силисе наричат електрически генератори. Те са дом на взаимодействието между електрически явления и явления от различно естество, които реализират генерирането на електричество чрез преобразуване от други форми на енергия. Те са активни двуполюсници, имат клеми, които позволяват свързване с други електрически компоненти, и попадат в две категории: ток към ток.

Стъпковият двигател се използва главно за следните цели:
- работа на фрезата;
- работа с шлифовъчна машина;
- осигурява работата на различни домакински уреди;
- работа на промишлени механични средства;
- осигурява транспорт.
Идеални генератори на напрежение Генератор на напрежение може да бъде обозначен с един от следните символи. Представяне на генератора на ток. Какви видове генератори има? Голям вятърни парковесе състои от стотици отделни вятърни турбини, свързани към електрическа мрежа. Офшорният вятър е по-стабилен, осигурява повече енергия и има по-малко визуално въздействие, но разходите за строителство и Поддръжказначително по-висока. Малки вятърни паркове на сушата осигуряват електричество на изолирани места.
Принцип на задвижване
 Принципът на работа на това устройство е следният. При подаване на напрежение към клемите четките на самия стъпков двигател започват да се движат постоянно. двигател празен ходима уникално свойство: то преобразува входящите импулси, имащ предимно правоъгълна ориентация, до предварително определена позиция на прикрепения задвижващ вал.
Принципът на работа на това устройство е следният. При подаване на напрежение към клемите четките на самия стъпков двигател започват да се движат постоянно. двигател празен ходима уникално свойство: то преобразува входящите импулси, имащ предимно правоъгълна ориентация, до предварително определена позиция на прикрепения задвижващ вал.
Електрическите компании все повече купуват излишната електроенергия, произведена от малки домашни вятърни турбини. Вятърната енергия е алтернативна енергия от изкопаеми горива, която е богата, възобновяема и поддържана от зелена икономика, широко разпространена, чиста, не отделя парникови газове по време на работа и изисква прекалено високи поземлен имот. Средата като цяло е по-малко проблематична от околен свят. Остриета на вятъра, тези добри гиганти са винаги в движение, неспособни да очароват и любознателни.
Всеки от входящите импулси е в състояние да премести вала под определен ъгъл. Устройствата, които са оборудвани с такава скоростна кутия, имат максимална ефективност, при условие че има няколко зъбни електромагнита, които са разположени около централно парче желязо, което има форма на зъбно колело. Външната верига за управление захранва електромагнита. Ако е необходимо да се завърти валът на двигателя, електромагнитът, към който се прилага енергията, привлича зъбите на колелото. Когато са подравнени с електромагнита, те са изместени по отношение на следващата магнитна част на двигателя.
Видове стъпкови двигатели
И така, за да се съмняваме, ще обясним как работят. На първо място, започваме с разграничаване на два вида вятърни турбини: вертикална ос и хоризонтална ос. Турбините, които обикновено се срещат в съвременните вятърни паркове, се състоят от кула и три лопатки с хоризонтална ос, от които са кръстени. По-рядко срещани са турбини с вертикална ос, по-малко ефективни от първите, но те могат да насочват вятъра във всички посоки и дори при слаб вятър могат да се въртят бързо.
Синхронни линейни стъпкови двигатели
Те се състоят от централна кула, около която са разположени вертикални остриета. електрически мотор променлив токе електрически двигател, който може да работи с променлив ток. Само със статорна намотка Тези двигатели са едни от най-използваните захранвания за този тип и са разделени на няколко аспекта: Брой фази Трифазен двигател.
Първият електромагнит се изключва, а след това вторият се включва, след което зъбното колело започва да се върти, докато се подравнява с предишното колело. Тогава това действие се повтаря.необходим брой пъти. Всяко от тези завъртания се нарича постоянна стъпка, докато скоростта на въртене на стъпков двигател може да се изчисли чрез преброяване на броя стъпки, необходими за завършване на оборота.
Трифазен асинхронен двигател Магнит на статора в асинхронен трифазен двигател Трифазният двигател е вид електродвигател, който изисква стартиране на трифазна система от токове, фазирани във времето и пространството под ъгъл от 120°. Асинхронният двигател е AC двигател, ъглова скоростнеговият ротор е по-малък от скоростта на въртене на магнитното поле, генерирано от намотките на статора, от които е асинхронен. Индукционният двигател се нарича още асинхронен двигател поради неговия принцип на работа, както е описан по-долу.
За управление на работата на стъпковия двигател се използва специален драйвер. Това е необходимо в случаите, когато настройвате задвижване за работа на машина или го използвате за стартиране на вятърен генератор.
Видове стъпкови двигатели
Стъпковите двигатели са разделени на следните видове:
Характеристики на свързване на стъпков двигател
Асинхронният двигател може да се използва като алтернатор със или без използване на кондензатори в зависимост от това дали е свързан към електрическата мрежа или не. Използва се за малки мощности в ситуации, в които се предпочита лекотата на използване на синхронен двигател дори за сметка на производителността.
Еднофазният двигател е вид електрически двигател, който изисква използването на електрическа линия с електрическа фаза и неутрален проводник, тези двигатели могат да имат различни приложения и конструкции, обикновено като се вземат предвид неелектрическите характеристики Двуфазни двигатели се използват за задвижване на тези двигатели, където те получават втора фаза чрез използване на кондензатор.
- с постоянен магнит;
- синхронно хибридно задвижване;
- променлив двигател.
Всички те са донякъде различни един от друг, включително принципите на тяхната работа.
Например задвижванията с постоянен магнит са оборудвани със специална магнитна част в ротора. Такива двигателите работят на принципа на привличане или отблъскванестатор и ротор на двигател, базиран на електромагнит.
Синхронният двигател е по-рядко използван еднофазен двигател с няколко приложения, характеризиращи се с магнитно поле, индуцирано от магнитно поле, синхронизирано с магнитното поле на статора, което след това се върти със същата честота. Когато токът протича през намотките, около ротора се създава магнитно поле. Лявата част на ротора се изхвърля от левия магнит и се тегли от десния. По същия начин долу вдясно. Двойката генерира ротация. Когато арматурата се подравни хоризонтално, превключвателят обръща посоката на тока през намотките, променяйки също и магнитното поле.
Променливият двигател има конвенционален железен ротор и работата му е изградена на принципа на фундаменталността. Когато минималното ниво на отблъскване е разрешено с най-малката празнина, докато точките на ротора имат привличане към полюсите на статора.
Но хибридното задвижване може да комбинира и двата принципа на работа, счита се за най-скъпия модел на стъпкови двигатели.
Линейният двигател е електрически двигател, при който роторът и статорът, вместо да са кръгли, се „въртят“ и вместо да създават въртящ момент, те създават линейна сила. Има много конструктивни решения за линейни двигатели, които могат да бъдат разделени на две категории: ниско ускорение и високо ускорение.
Основни спецификации на двигателя
Представяне на електродвигател. Електрическите превозни средства могат да бъдат различни и в зависимост от нуждите или характеристики на дизайнана 1, 2, 3, 4 или повече колела. Кои са най-често срещаните видове превозни средства? Електрически мотоциклет, нулев мотоциклет Електрическият скутер или електрическият мотоциклет е дву- или триколесно превозно средство, което използва Електрически двигателза движение.
Двуфазни стъпкови двигатели
 Двуфазният двигател е много прост, може да бъде инсталиран от човек без специален опит. Независимо дали сте го сглобили сами или сте го закупили от рафта, той има два вида намотки на бобината:
Двуфазният двигател е много прост, може да бъде инсталиран от човек без специален опит. Независимо дали сте го сглобили сами или сте го закупили от рафта, той има два вида намотки на бобината:
Статията се занимава със случайно свръхток и краткотрайно претоварване с въртящ момент в многофазни асинхронни двигатели, двигатели постоянен токи многофазни синхронни двигатели. Токовият капацитет на претоварване на ротационните машини е показан, за да съответства на тези машини с контролни и защитни устройства. Топлинният ефект в навиващите машини варира приблизително в резултат на времето и секундната мощност на тока. Токът, надвишаващ номиналния ток, ще повиши температурата. Освен ако не е посочено друго, може да се приеме, че машината ще работи при текущи претоварвания през целия си живот само за няколко кратки периода от време.
- еднополюсен;
- биполярно.
Ако стъпковият двигател има една намотка с централен магнитен кран, засягащ всяка фаза, тогава това е еднополюсно задвижване. Всяка секция на намотката трябва да бъде включена, за да се осигури правилната посока на магнитното поле. Следователно в това задвижване магнитният полюс може да функционира без необходимост от допълнително превключване текущите посоки и превключването на вериги са направени много прости, използвайки по един транзистор за всяка намотка. Взети са предвид следните фазови промени:
Ако AC машина трябва да се използва като генератор, а не като двигател, тогава претоварването трябва да бъде въпрос на споразумение. Двигатели Многофазните двигатели с номинална мощност до 315 kW и номинално напрежение до 1 kV трябва да издържат на: ток, равен на 1,5 пъти номиналния ток за най-малко 2 минути. За многофазни двигатели с номинална мощност над 315 kW и за всички монофазни двигателиняма случаен свръхток.
Моментно торсионно претоварване на двигателите
Превключвателят трябва да издържа 1,5 пъти номиналния ток за 60 секунди при подходяща комбинация от следните условия. Полифазен асинхронни двигателии постояннотокови двигатели. Двигателите, независимо от техния тип натоварване и конструкция, трябва да издържат 15 секунди без спиране или внезапна промяна на въртящия момент, претоварване, 60% от техния номинален въртящ момент, с напрежение и честота, поддържани с номинални стойности. За двигатели с постоянен ток въртящият момент трябва да бъде изразен като свръхток.
- три проводника на фаза;
- шест на изход.
Микроконтролерът на задвижващия двигател може да се използва за активиране на транзистора в определена последователност.
И намотките могат да бъдат свързани и чрез докосване на свързващите проводници заедно с постоянните магнити на задвижването. При свързване на клемите на бобината ще бъде трудно да завъртите вала. Съпротивление между края на бобината и общия проводник равно на половината от съпротивлениетонамотки и краища на проводници. Изглежда така, защото общ проводникТо има голяма дължинаотколкото половината част, използвана за свързване на бобините.
Двигателите, предназначени за специални приложения, изискващи висок въртящ момент, трябва да бъдат съчетани. В случай на асинхронни двигатели с късо съединение, проектирани специално за постигане на стартов ток, по-малък от 4,5 пъти по-висок номинален ток, претоварването на въртящия момент може да бъде по-малко от 60% от стойността, посочена в първия параграф, но не по-малко от 50%.
В случай на специални типове асинхронни двигатели със специални стартови характеристики, като двигатели с променлива скорост или асинхронни двигатели, захранвани от статични преобразуватели, трябва да се съгласува стойността на свръхвъртящия момент. Освен ако не е посочено друго, многофазният синхронен двигател трябва да издържа, независимо от натоварването, в продължение на 15 секунди на въртящия момент на претоварване, описан по-долу, без загуба на синхронизация, като същевременно поддържа възбуждане на стойност, съответстваща на номиналния товар.
Биполярните стъпкови двигатели имат една фазова намотка, в която токът се подава по реверсивен начин с помощта на магнитен полюс. Системата за управление в този случай ще бъде сложна с помощта на свързващ мост. Има два проводника на фаза, но те не са често срещани. Чрез смесване на сигнала на стъпковия двигател с високи честоти, ефектът на триене на системата може да бъде намален.
В допълнение, друг тип стъпков двигател е трифазен, но неговият обхват е твърде тесен:
- по време на работа на фрезови машини с ЦПУ;
- на някои превозни средства, където се използва дроселна клапа;
- на устройството и принтерите на някои марки.
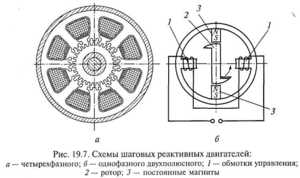
Реактивни стъпкови двигатели: характеристики и принцип на работа
 Струва си да се отбележи, че активните стъпкови задвижвания имат голям недостатък: това е голяма стъпка, достигаща няколко десетки градуса. За разлика от тях, реактивен стъпковите двигатели са в състояние да намалят честотата на ротора, поради което стъпалото става ъглово по-малко от градус.
Струва си да се отбележи, че активните стъпкови задвижвания имат голям недостатък: това е голяма стъпка, достигаща няколко десетки градуса. За разлика от тях, реактивен стъпковите двигатели са в състояние да намалят честотата на ротора, поради което стъпалото става ъглово по-малко от градус.
Основната характеристика на реактивното задвижване е, че зъбите са разположени върху полюсите на статора. Синхронизиращият момент в него се осигурява от разликата в магнитното съпротивление по напречната и надлъжната ос на задвижването.
Реактивният стъпков двигател има един основен недостатък: той няма синхронизиращ моментако намотките на статора са без напрежение.
Възможно е да се увеличи степента на намаляване на двигателя, независимо кой, активен или реактивен, като се използват многопакетни структури, когато зъбите на статора са изместени един към друг с част от разделението, а роторът на всеки пакет не се движат и осите на полюсите им са еднакви. Подобен дизайнът е много сложен по отношение на създаванетои не е евтин в завършен вид, той също ще изисква сложен превключвател.
Към днешна дата в продажба можете да намерите огромен брой различни конструкции на двигатели, които се различават по такива параметри като:
- брой фази;
- тип поставяне на навиване;
- начини за фиксиране на ротора и др.
В индукторните стъпкови двигатели въртящият момент се създава от взаимодействието на магнитно поле, което се създава от намотките на статора, и постоянен магнит, разположен в зъбната част на междината.
Синхронизиращият въртящ момент в индукторен двигател сам по себе си е реактивен, което води до статорна намотка, докато постоянният магнит е в състояние да произведе фиксиращ въртящ момент, като по този начин държи ротора на място. желана позициябез ток.
За разлика от реактивния стъпков двигател, индукторният, с подобна стъпка, има по-голям синхронизиращ момент, както и по-усъвършенстван спецификации.
Синхронни линейни стъпкови двигатели
 За да се автоматизират някои производствени процеси в едно предприятие, понякога става необходимо да се преместват обекти в равнина. Да го направя трябва да използвате специален конверторвъртеливо движение в транслационно, което се постига чрез прилагане на кинематика.
За да се автоматизират някои производствени процеси в едно предприятие, понякога става необходимо да се преместват обекти в равнина. Да го направя трябва да използвате специален конверторвъртеливо движение в транслационно, което се постига чрез прилагане на кинематика.
С линейните стъпкови двигатели можете да преобразувате импулсната команда директно в линейно движение, което значително ще опрости кинематичната схема на различни електрически задвижвания.
Статорът в това устройство е представен под формата на магнитно мека плоча, а проводниците са магнетизирани чрез действието на постоянен магнит.
Деленията на зъбите в статора и движещата се част са еднакви, докато те могат да бъдат изместени с половин делениев рамките на един проводник на ротора. Потокът на отклонение и неговото магнитно съпротивление в този случай не зависят от това къде се намира движещата се част на двигателя.
За преместване на обект в равнина по две координати се използват двукоординатни двигатели.
Също така в линейните двигатели се използва магнитно въздушно окачване. Поради силата на магнитното привличане роторът се привлича към статора. По-нататък въздухът се издухва под ротора през дюзитев компресирана форма, в резултат на което се появява сила, която отблъсква ротора от статора. Така че между тях има въздушна възглавница и роторът виси над статора с минимална хлабина. Това осигурява минимално съпротивление на движението на ротора и високо прецизно позициониране.
 Задвижването е в състояние да работи стабилно, при условие че няма загуба на стъпки по време на обработката на ъгъла, когато импулсни серии се прилагат към управляващите намотки. По време на всяка стъпка роторът има уверен баланспо отношение на вектора на магнитната индукция, свързана с магнитно полестатор.
Задвижването е в състояние да работи стабилно, при условие че няма загуба на стъпки по време на обработката на ъгъла, когато импулсни серии се прилагат към управляващите намотки. По време на всяка стъпка роторът има уверен баланспо отношение на вектора на магнитната индукция, свързана с магнитно полестатор.
Режимът на обработка на всяка стъпка трябва да съответства на броя на управляващите импулси, които се прилагат към задвижващите намотки, и в същото време, докато пристигне следващият импулс, той трябва да изработи дадения му ъгъл на въртене. В началото на всяка стъпка ъгловата скорост на двигателя трябва да бъде нула.
Допускат се колебания на ъгловия задвижващ вал по отношение на установената стойност. Те се дължат на наличието на кинетична енергия, която се акумулира от вала на двигателя при изработването на ъгъла. В този случай енергията, която може да се преобразува в загуби:
- магнитни;
- механични;
- електрически.
Колкото по-голяма е тяхната стойност, толкова по-бързо завършва преходният процес на изработване на една стъпка от задвижването.
При стартиране роторът може да изостава от статорния поток с една стъпка или дори повече, което води до несъответствие между броя на роторните стъпки и статорния поток.
Основните характеристики на стъпковия двигател са:
- крайна механична характеристика;
- Вдигни.
Ограничителната характеристика е зависимостта на максимално възможния синхронизиращ момент от честотите на управляващите импулси.
И пикап е честотата на тези импулси, което елиминира възможността за загуба или добавяне на стъпка по време на обработка. Вдигни се счита за ключов показателпреходен режим в двигателя. Той може да расте заедно със синхронизиращия въртящ момент, намаляването на стъпката, инерционния момент на линейно изместени или завъртяни частици, както и статичния момент на съпротивление.
Характеристики на свързване на стъпков двигател
 Можете да свържете стъпков тип двигател според една или друга схема, която зависи от броя на проводниците и методите на стартиране.
Можете да свържете стъпков тип двигател според една или друга схема, която зависи от броя на проводниците и методите на стартиране.
Моторите могат да имат четири до осем проводника. Ако има само четири от тях, тогава използването на двигателя е възможно само с биполярно устройство. Всяка фазова намотка, от която има само две, е оборудвана с два проводника. Кабелните двойки трябва да се определят с помощта на измервателен уред, след което драйверът се свързва стъпка по стъпка.
Моторът, оборудван с шест проводника, включва два проводника за всяка намотка и централен кран, също за всеки от тях. Може да се свързва както с еднополярни, така и с биполярни устройства. За разделно задвижване трябва да се използва специално устройство.за измерване. Към еднополярно устройство задвижването може да бъде свързано с помощта на всичките шест проводника, а към еднополярно устройство ще са достатъчни един край и един централен кран от всяка намотка.
Петпроводният двигател практически не се различава от предишния, но неговите централни клеми са свързани отвътре като един твърд кабел и имат един изход към един от проводниците. Не отделяйте намотките един от друг, в противен случай можете да ги счупите. Вместо това е по-добре да идентифицирате центъра на проводника и да го свържете с други проводници, това ще бъде най-ефективното решение за свързване. След това можете да свържете самото устройство и да го проверите за работоспособност.
Основни спецификации на двигателя
 Първичната намотка при постоянен ток създава Номинално напрежение. И началната скорост на задвижващия въртящ момент варира в зависимост от тока. Времето за намаляване на линейния момент при по-високи обороти зависи от това каква е веригата на двигателя и от индуктивността на неговите намотки. Някои марки двигатели със защита IP65 могат да работят в най-трудните условия.
Първичната намотка при постоянен ток създава Номинално напрежение. И началната скорост на задвижващия въртящ момент варира в зависимост от тока. Времето за намаляване на линейния момент при по-високи обороти зависи от това каква е веригата на двигателя и от индуктивността на неговите намотки. Някои марки двигатели със защита IP65 могат да работят в най-трудните условия.
Ако искате да изберете готов модел на стъпков двигател от местно производство, обърнете внимание на основните технически характеристикинай-известните модели:
- ShD-1 - степен на стъпка е 15, 4 фази, въртящ момент е 40 Nt;
- DSh-0.04A - степенна стъпка 22.5, 4 фази, въртящ момент 100 Nt;
- DSHI 200 - степенна стъпка 1.8, 4 фази, въртящ момент 0.25 Nt;
- ДШ-6 - степен на стъпка - 18, 4 фази, въртящ момент 2300 Nt.
Също така популярни сред купувачите са такива модели като:
- четирифазен DShR-40;
- SM-200-0,22;
- Purelogic R&D с енкодер;
- NEMA 23;
- STH-39D1112;
- SP-57;
- SanyoDenkiSM28.
При избора желан двигател, е необходимо да се изчислят параметрите на мощността, напрежението и въртящия момент.
Един от проблемите при работата на стъпков двигател е управлението на устройствата при липса на контролер. За да се справите с това, трябва да вземете специален блок за логическа връзка, което помага да се контролира двигателят при липса на подходяща микросхема. Въпреки това, най-добре е да контролирате работата на стъпковите двигатели с помощта на специален контролер.
Средната цена на стъпковото задвижване в големите градове на Русия и Украйна
Цената на това устройство зависи пряко от такива показатели като:

Средната цена на еднополюсен стъпков двигател е:
- Москва - 3000 USD;
- Санкт Петербург - 3500 USD;
- Киев - 3500 USD;
- Харков - 4000 c.u.
И така, казахме какво е стъпков двигател, на какъв принцип работи, на какви категории е разделен и от какви свойства се различава. Надяваме се, че това ще ви улесни при избора кога трябва да закупите това устройство.
Страница 3
Основните размери и характеристики на тяговите колела на VNIIPTmash са дадени в таблица. 6.2. Чрез замяната на четириполюсния електродвигател с фланцов двуполюсен електродвигател с вградена електромагнитна спирачка, скоростта на количката може да се увеличи 2 пъти, а при използване на електродвигатели с променлив брой полюси, две степени на работа могат да се получат скорости.
| Схемата на подземния клъстер. |
В инсталации на потопяеми винтови електрически помпи се използват четириполюсни електродвигатели с честота на въртене на вала 1500 об / мин (синхронни), а в инсталации на потопяеми центробежни електрически помпи се използват двуполюсни електродвигатели с честота на въртене на вала 3000 об / мин.
Всички тези компресори са едноцилиндрови, имат диаметър на цилиндъра 36 mm, код на буталото 19 mm, обем, описан от буталото, 0,87 dm3 - s. Използват се трифазни двуполюсни електродвигатели АВК2 - 0 7; AEC2 - 0,7 и AEC2 - 1 (съответно), характеристиките на които са дадени в табл. V-14.
EPU има механизъм за автоматично управление на пикапа. EPU работи от асинхронен монофазен двуполюсен електродвигател С кондензаторно пускане Скорост на ротора 2800 об/мин. За да се намали нивото на фона, електродвигателят е затворен в екран от пермалой.
Ако, например, има 12 слота в статора на двуполюсен електродвигател, тогава има шест слота на полюс и тези шест слота трябва да поемат страните на намотките на всичките три фази, които създават този полюс. Следователно, когато се проектират и изготвят вериги за намотки, броят на слотовете на полюс и фаза е характерна и решаваща стойност.
Защитени и затворени вентилирани електродвигатели с същите стойностимощността и скоростта на въртене имат еднакви монтажни размери. Изключение от това общо правилоса двуполюсни електродвигатели в затворено, вентилирано изпълнение, при които мощността е с едно стъпало по-ниска от тази на електродвигателите в защитено изпълнение. В същото време за биполярни електродвигатели A и AO с размери 6, 7, 8 и 9 с мощност 14, 28, 55 и 100 kW инсталационните размери са еднакви.
Започваме изчислението с двигатели с постоянен ток, тъй като тяхното изчисление е по-просто и по-ясно от двигателите с променлив ток. Ето подробно обяснение на всички изчислени стойности, които след това ще бъдат намерени в AC двигатели. Изчислението е дадено за двуполюсни електродвигатели с последователно възбуждане.
Използват се и винтови електрически помпи, които външно не се различават от конвенционалните ESP. В този случай маслото от кладенци на повърхността се подава не от центробежна, а от винтова (едновинтова) помпа. В такива помпи се използват четириполюсни синхронни електродвигатели със скорост на вала 1500 об / мин, а в конвенционалните ESP се използват двуполюсни електродвигатели със скорост на вала 3000 об / мин.
Четките трябва да се притискат към повърхността на комутатора. За това са държачите за четки. Над четката се поставя спираловидна пружина от тънка тел. В горната част на тръбата се завинтва капачка 5, която предпазва четката и пружината от изпадане от тръбата. Четкодържателят се притиска в стената на корпуса на двигателя. Двуполюсният двигател трябва да има два четкодържача с четки. Те трябва да бъдат монтирани така, че четките да са между полюсите на магнитната система на електродвигателя. Четкодържателите трябва да са изолирани един от друг и от корпуса на двигателя. За източване на тока трябва да се завинти или запои изолиран проводник към държача на четката.