От какво е направен постояннотоковият двигател? Безчетков DC мотор
електрически мотор постоянен токе изобретен преди други видове машини, които конвертират електрическа енергияв механични. Въпреки факта, че по-късно двигателите са били най-широко използвани променлив ток, има приложения, при които няма алтернатива на постояннотокови двигатели.
DC и AC двигател
История на изобретението
Електрически двигател Jacobi.
За да разберем принципа на работа на електродвигателите с постоянен ток (DC двигатели), се обръщаме към историята на неговото създаване. И така, първото експериментално доказателство, че електрическата енергия може да се преобразува в механична, беше демонстрирано от Майкъл Фарадей. През 1821 г. той провежда експеримент с проводник, спуснат в съд, пълен с живак, на дъното на който има постоянен магнит. След като приложи електричество към проводника, той започна да се върти около магнита, демонстрирайки реакцията си към магнитното поле, присъстващо в съда. Експериментът на Фарадей не намери практическо приложение, но доказа възможността за създаване на електрически машини и даде началото на развитието на електромеханиката.
Първият Електрически двигателпостоянен ток, който се основава на принципа на въртене на движещата се част (ротор), е създаден от руския физик-механик Борис Семенович Якоби през 1834 г. Това устройство работеше по следния начин:
Описаният принцип е използван в двигател, който Якоби монтира в лодка с 12 пътници през 1839 г. Корабът се движеше рязко със скорост 3 км/ч срещу течението (според други източници - 4,5 км/ч), но успешно прекоси реката и стовари пътници на брега. Като източник на енергия е използвана батерия с 320 галванични клетки, а движението се извършва с гребни колела.
По-нататъшното проучване на проблема накара изследователите да разрешат множество въпроси относно това кои източници на енергия е най-добре да се използват, как да се подобри неговата производителност и да се оптимизират размерите му.
През 1886 г. Франк Джулиан Спраг за първи път проектира електрически двигател с постоянен ток, подобен по дизайн на тези, използвани днес. Той реализира принципа на самовъзбуждане и принципа на обратимостта на електрическата машина. До този момент всички двигатели от този тип са преминали към захранване от по-подходящ източник - генератор на постоянен ток.
Устройството за събиране на четки осигурява електрическа връзкароторни вериги с вериги, разположени в неподвижната част на машината
Устройство и принцип на действие
В съвременните DPT се използва същият принцип на взаимодействие на зареден проводник с магнитно поле. С подобряването на технологиите устройството се допълва само с някои елементи, които подобряват производителността. Например, в днешно време постоянните магнити се използват само в двигатели с ниска мощност, тъй като в големите машини биха заели твърде много място.
Основният принцип
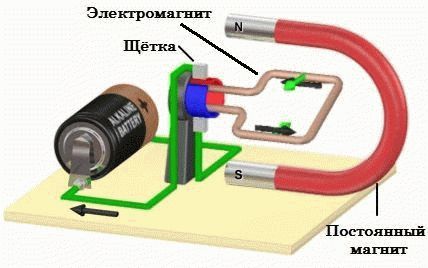
Първоначалните прототипи на двигатели от този тип бяха значително по-прости от съвременните устройства. Тяхното примитивно устройство включва само статор от два магнита и арматура с намотки, към които се прилага ток. След като проучиха принципа на взаимодействие на магнитните полета, дизайнерите определиха следния алгоритъм на работа на двигателя:
- Захранването създава електромагнитно поле върху намотките на котвата.
- Полюс електро магнитно полеотблъснати от същите полюси на полето на постоянен магнит.
- Котвата, заедно с вала, върху който е закрепена, се върти в съответствие с отблъскващото поле на намотката.
Този алгоритъм работеше перфектно на теория, но на практика създателите на първите двигатели се сблъскаха със специфични проблеми, които попречиха на работата на машината:
- Мъртво положение, от което двигателят не може да се стартира - когато полюсите са точно ориентирани един срещу друг.
- Невъзможност за стартиране поради силно съпротивление или слабо отблъскване на стълбовете.
- Роторът спира след един оборот. Това се дължи на факта, че след преминаване на половината кръг, привличането на магнита не се ускори, а забави въртенето на ротора.
Решението на първия проблем беше намерено доста бързо - за това беше предложено да се използват повече от два магнита. По-късно в устройството на двигателя бяха включени няколко намотки и възел колектор-четка, които захранваха само една двойка намотки в определен момент от време.
Системата за подаване на ток на колектор-четка също решава проблема със спирането на ротора - превключването на полярността се извършва до момента, в който въртенето на ротора започне да се забавя. Това означава, че по време на един оборот на двигателя има поне две смени на полярността.
Проблемът с ниските пускови токове е разгледан по-долу в отделен раздел.
Дизайн
И така, постоянен магнит е фиксиран върху корпуса на двигателя, образувайки с него статор, вътре в който е разположен роторът. След подаване на мощност към намотката на котвата възниква електромагнитно поле, което взаимодейства с магнитното поле на статора, което води до въртене на ротора, който е твърдо монтиран на вала. За предаване електрически токот източника до арматурата, двигателят е оборудван с колекторно-четков възел, състоящ се от:
- Колекционер. Това е пръстен за събиране на ток от няколко секции, разделени от диелектричен материал, свързани към намотките на котвата и монтирани директно върху вала на двигателя.
- Графитни четки. Те затварят веригата между колектора и източника на захранване с помощта на четки, които се притискат към контактните площадки на колектора с пружини за натиск.
Намотките на котвата са свързани в единия край една към друга, а в другия край към колекторните секции, като по този начин образуват верига, по която протича токът по следния маршрут: входна четка -> намотка на ротора -> изходна четка.
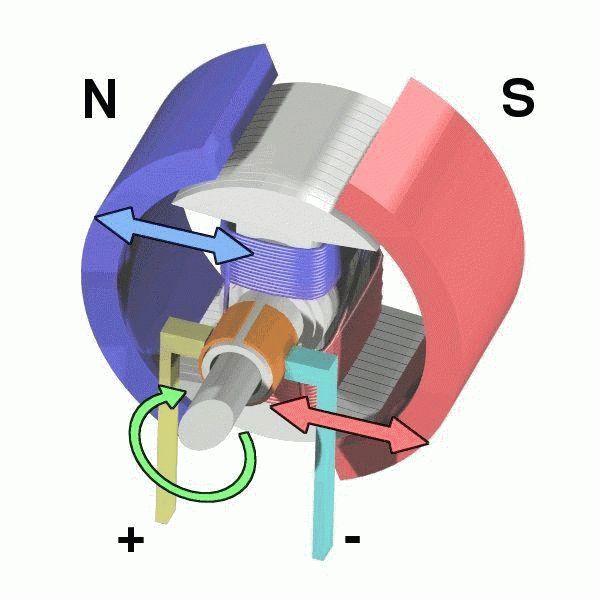
Намалена електрическа схема(Фиг. 3) демонстрира принципа на работа на примитивен DC двигател с колектор от две секции:
- В този пример ще разгледаме началната позиция на ротора, както е показано на диаграмата. И така, след подаване на захранване към долната четка, маркирана с „+“, токът протича през намотката и създава електромагнитно поле около нея.
- Според правилото на gimlet северният полюс на котвата се формира в долната лява част, а южният полюс се формира в горната дясна част. Разположени близо до едноименните полюси на статора, те започват да се отблъскват, като по този начин привеждат ротора в движение, което продължава, докато противоположните полюси са на минимално разстояние един от друг, т.е. достигат крайната позиция (фиг. 1).
- Дизайнът на колектора на този етап ще доведе до обръщане на полярността на намотките на котвата. В резултат на това полюсите на магнитните полета отново ще бъдат на близко разстояние и ще започнат да се отблъскват.
- Роторът прави пълен оборот, а колекторът отново обръща полярността, продължавайки движението си.
Части за постояннотокови двигатели
Тук, както вече беше отбелязано, се демонстрира принципът на работа на примитивен прототип. Истинските двигатели използват повече от два магнита, а комутаторът се състои от повече контактни площадки, което осигурява плавно въртене.
При двигатели с голяма мощност използването на постоянни магнити е невъзможно поради големия им размер. Алтернатива за тях е система от няколко проводящи пръта, всеки от които има собствена намотка, свързана към захранващите шини. Полюсите със същото име са включени в мрежата последователно. На тялото могат да присъстват от 1 до 4 чифта полюси, като техният брой трябва да съответства на броя на токосъбиращите четки на колектора.
Електрическите двигатели, предназначени за висока мощност, имат редица функционални предимства пред своите "по-леки" събратя. Например, локалното разположение на токосъбиращите четки ги завърта под определен ъгъл спрямо вала, за да компенсира спирането на вала, наречено "реакция на котвата".
Пускови токове
Постепенното оборудване на ротора на двигателя с допълнителни елементи, които осигуряват неговата непрекъсната работа и изключват секторното спиране, възниква проблемът с неговото стартиране. Но всичко това увеличава теглото на ротора - като се вземе предвид съпротивлението на вала, става по-трудно да го избутате от мястото му. Първото решение на този проблем, което ви идва на ум, може да бъде увеличаване на подавания ток в началото, но това може да доведе до неприятни последици:
- прекъсвачът на линията няма да издържи на тока и ще се изключи;
- проводниците за намотаване ще изгорят от претоварване;
- комутационните сектори на колектора ще бъдат заварени от прегряване.
Следователно подобно решение може да се нарече по-скоро рискована полумярка.
Като цяло този проблем е основният недостатък на постояннотоковите двигатели, но включва основното им предимство, поради което те са незаменими в някои области. Това предимство се крие в директното предаване на въртящия момент веднага след стартиране - валът (ако започне да се движи) ще се върти при всякакво натоварване. AC двигателите не са способни на това.
Досега този проблем не е напълно решен. Към днешна дата за стартиране на такива двигатели се използва автоматичен стартер, чийто принцип на работа е подобен на автомобилна скоростна кутия:
- Първо, токът постепенно се повишава до началната стойност.
- След „изместване“ от мястото текущата стойност рязко пада и отново плавно се повишава „регулиране на въртенето на вала“.
- След покачване до граничната стойност, силата на тока отново намалява и се „настройва“.
Този цикъл се повтаря 3-5 пъти(фиг. 4) и решава необходимостта от стартиране на двигателя без възникване на критични натоварвания в мрежата. Всъщност все още няма "мек" старт, но оборудването работи безопасно и основното предимство на DC двигателя - въртящият момент - се запазва.
Електрически схеми
Свързването на DC двигател е малко по-трудно, отколкото при двигатели с AC спецификация.
За двигатели с висока и средна мощност, като правило, има специални контакти на възбуждащата намотка (OV) и котви, поставени в клемна кутия. Най-често изходното напрежение на източника се прилага към арматурата, а токът, като правило, регулиран от реостат, се прилага към OB. Скоростта на въртене на двигателя директно зависи от силата на тока, приложен към намотката на възбуждане.
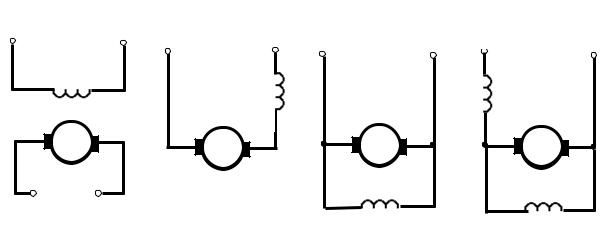
Има три основни схеми за включване на котвата и възбуждащата намотка на двигателите с постоянен ток:
- Серийното възбуждане се използва в двигатели, които изискват голям ток при стартиране (електрически превозни средства, оборудване под наем и др.). Тази схемаосигурява серийна връзка OV и котви към източника. След прилагане на напрежение токове със същата величина преминават през намотките на котвата и OB , Трябва да се има предвид, че намаляването на натоварването на вала дори с една четвърт с последователно възбуждане ще доведе до рязко увеличаване на скоростта, което може да доведе до повреда на двигателя, поради което тази верига се използва при условия на постоянно натоварване.
- Паралелното възбуждане се използва в двигатели, които осигуряват работата на машинни инструменти, вентилатори и друго оборудване, което не упражнява голямо натоварване върху вала по време на стартиране. В тази схема се използва независима намотка за възбуждане на OF, която най-често се регулира от реостат.
- Независимото възбуждане е много подобно на паралелното възбуждане, но в този случай се използва независим източник за захранване на OB, което елиминира появата на електрическа връзка между арматурата и намотката на възбуждане.
В съвременните електродвигатели с постоянен ток могат да се използват смесени вериги въз основа на трите описани.
Регулиране на скоростта на въртене
Начинът за регулиране на скоростта на DPT зависи от схемата на неговото свързване:
- При двигатели с паралелно възбуждане намаляването на скоростта спрямо номиналната стойност може да се извърши чрез промяна на напрежението на котвата и увеличаване чрез отслабване на възбудителния поток. За да се увеличи скоростта (не повече от 4 пъти спрямо номиналната стойност), към веригата OB се добавя реостат.
- При серийно възбуждане настройката се извършва лесно чрез променливо съпротивление в арматурната верига. Вярно е, че този метод е подходящ само за намаляване на скоростта и само в съотношения 1: 3 или 1: 2 (в допълнение, това води до големи загуби в реостата). Увеличаването се извършва с помощта на регулиращ реостат в OB веригата.
Тези схеми рядко се използват в модерно високотехнологично оборудване, тъй като имат тесен диапазон на регулиране и други недостатъци. В наши дни за тези цели все повече се създават електронни схеми за управление.
Заден ход
За да обърнете (обратно) въртенето на DC двигател, трябва:
- със серийно възбуждане - просто променете полярността на входните контакти;
- със смесено и паралелно възбуждане - необходимо е да се промени посоката на тока в намотката на котвата; разкъсването на RH може да доведе до критично увеличение на инжектирания електродвижеща силаи разрушаване на изолацията на проводника.
Обхват на приложение, обхват на прилагане
Както вече разбрахте, използването на двигатели с постоянен ток е препоръчително в условия, при които не е възможно постоянна непрекъсната връзка с мрежата. Добър пример тук би бил стартер на кола, който бута двигател вътрешно горене"от място", или детски играчки с мотор. В тези случаи за стартиране на двигателя се използват презареждащи се батерии. За промишлени цели DPT се използват във валцови мелници.
Основната област на приложение на DPT е електрическият транспорт. Параходите, електрическите локомотиви, трамваите, тролейбусите и други подобни имат много голямо стартово съпротивление, което може да бъде преодоляно само с помощта на постояннотокови двигатели с техните меки характеристикии широк диапазон на регулиране на въртенето. Като се има предвид бързото развитие и популяризиране на екологичните транспортни технологии, обхватът на DPT само се увеличава.
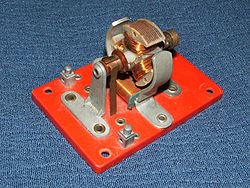
Най-простият монтаж на четка-колектор
Предимства и недостатъци
Обобщавайки всичко по-горе, е възможно да се опишат предимствата и недостатъците, характерни за двигателите с постоянен ток спрямо техните колеги, предназначени да работят с променлив ток.
Основни предимства:
- DCT са незаменими в ситуации, когато е необходим силен стартов въртящ момент;
- скоростта на въртене на котвата е лесно регулируема;
- DC моторът е универсален електрическа машина, тоест може да се използва като генератор.
Основни недостатъци:
- DPT имат висока производствена цена;
- използването на възел четка-колектор води до необходимостта от честа поддръжка и ремонт;
- Изисква DC захранване или токоизправители за работа.
Електродвигателите с постоянен ток, разбира се, губят от своите "променливи" колеги по отношение на разходите и надеждността, но те се използват и ще бъдат използвани, тъй като предимствата на използването им в определени области категорично зачеркват всички недостатъци.
възниква искра. Това намалява надеждността на машините и ограничава техния обхват.
Съществен недостатък на DCT е необходимостта от предварително преобразуване на променлива електрическа енергия в постоянна електрическа енергия за тях.
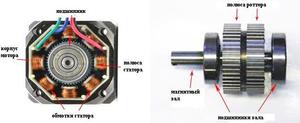
13.2. Устройството и принципът на работа на двигатели с постоянен ток
DC двигателите се състоят от три основни части:
– неподвижната част е рамка с индуктор;
– въртяща се част - котва;
– колектор, монтиран на вала на котвата и въртящ се с него.
Индуктор - система от фиксирани електромагнити (полюси), монтирани около обиколката на рамката на машината, която се състои от сърцевини, полюсни елементи, необходими за създаване на необходимото разпределение на магнитния поток и намотки,
наречени възбудителни намотки.
Ядрата и полюсните накрайници са изработени от листова електротехническа стомана.
Леглото - лято или заварено - е изработено от чугун или стомана, върху него са монтирани стълбове и лагерни щитове, в които са фиксирани лагерите на арматурния вал. Леглото е и ярема на машината, осигуряващ затварянето на магнитната верига.
Целта на индуктора е да създаде магнитен поток, когато токът преминава през възбуждащата намотка.
Арматурата се състои от назъбена сърцевина и положени намотки
в жлебове на ядрото, които се наричатанкерни намотки.Сърцевината на арматурата е направена от електротехническа ламарина
стомана (с дебелина 0,5 мм), от която са щамповани дискове с жлебове. Дисковете са покрити с изолационен лак за намаляване на загубите от вихрови токове.
Намотките на котвата са секции под формата на намотки, изработени от изолирана медна жица.
Схемите на навиване са кръгови или вълнови, бобините могат да бъдат свързани последователно и паралелно. Една проста контурна намотка има двуполюсни машини с ниска мощност
(до 1 kW) и машини с мощност над 500 kW; проста вълнова намотка се използва за машини с ниска и средна мощност (до 500 kW) при напрежение 110 V и повече.
Целта на котвата е да създаде електромагнитен въртящ момент чрез взаимодействие на тока в намотката на котвата с магнитното поле на полюсите, създадено от тока на възбуждане.
Колекторът е кух цилиндър, състоящ се от клиновидни медни пластини (под формата на "лястовича опашка"), изолирани една от друга и от тялото. Колекторните плочи също са изолирани от вала на машината.
Сглобеният колектор е монтиран на арматурния вал. Началото и краищата на намотката, поставени в жлебовете на арматурата, са запоени към колекторните плочи.
На колектора са монтирани неподвижни електрографитни четки. Намотката на въртящата се котва е свързана към външната верига чрез плъзгащ контакт между четките и комутатора.
Четките разделят затворената намотка на котвата на успоредни клони, броят на успоредните клони е равен на броя на четките, така че ЕМП на четките (ЕМП на машината) е равна на ЕМП на един паралелен клон.
Колекторът е електромеханичен преобразувател и осигурява създаването на постоянен въртящ момент в посока (за двигатели) чрез промяна на посоката на тока в проводниците на намотката на котвата, движещи се от зоната на единия полюс
в областта на друг.
AT В генераторите колекторът осигурява коригиране на променливата ЕМП, индуцирана във въртящата се намотка на котвата.
Включено обозначение на DPT електрически схемии принципът на неговото действие са показани на фиг. 97 а, б.
F EM |
||
Напрежението от източник на постоянен ток се прилага към клемите на неподвижната арматура. Нека посоката на тока в котвата I I е както е показано на фиг. 97б.
AT намотка на възбужданеразположен на полюсите на индуктора също се захранва с постоянен ток, който създава магнитно поле, проникващо в котвата. Ако полюсите на индуктора са направени от твърд магнитен материалтогава може да няма намотка на възбуждане върху тях, магнитното поле все още ще бъде създадено от противоположно намагнетизирани полюси (N и S).
Поради взаимодействието на магнитното поле на полюсите и тока на котвата се образуват електромагнитни сили F EM, които създават въртящ момент
M C F I ,
където C m е коефициентът на пропорционалност; F е потокът на възбуждане на DPT; I I е токът на котвата на DPT.
В DPT котва, въртяща се в магнитно поле, се индуцира ЕМП, която е противоположна на посоката на тока на котвата, следователно тази ЕМП се нарича обратна или противоположна ЕМП
E CE F n,
където C E е коефициентът на пропорционалност; Ф – поток на възбуждане на DPT, n – честота на въртене на DPT.
Основно уравнение на двигателя
Uc \u003d E + Iya Rya,
където U s е мрежовото напрежение; I i е токът на котвата; R i е съпротивлението на намотката на котвата.
Откъде идва токът на котвата
I i Uс R i E.

Замествайки стойността E в този израз, получаваме скоростта на DC двигателя:
U c | аз | |||
C EF |
||||
От този израз може да се види, че скоростта на въртене на DCT зависи от величината на входното напрежение, възбуждащия ток (поток
Ф I c ), съпротивление на котвената верига R i и натоварване върху вала I i .
13.3. Видове постояннотокови двигатели
Според метода на свързване на намотката на възбуждане и намотката на котвата, DCT се разделят на следните типове:
– DPT с независимо възбуждане (фиг. 98, а);
– DPT с последователно възбуждане (фиг. 98, b);
– DPT с паралелно възбуждане (фиг. 98, c);
– DPT със смесено възбуждане (фиг. 98, d).
При DPT с независимо възбужданенамотка на възбужданеи намотката на котвата се захранва от различни източници. Намотката на възбуждане е обозначена: H1 - H2 (фиг. 98, а).
Двигателите с висока мощност обикновено се изпълняват с независимо възбуждане.
При Свързана намотка за възбуждане на серия DCTпоследователнокъм намотката на котвата, се нарича сериен (C1 - C2, фиг. 98, b).
При двигатели с последователно възбуждане, въртящият момент под товар се увеличава повече от този на двигатели с паралелно възбуждане,докато оборотите на двигателя се намаляват.Това свойство определя широкото използване на DPT в машиностроителните електрически локомотиви, градския транспорт.
Стартирането на двигателя със серийно възбуждане без натоварване обаче е неприемливо, тъй като скоростта на двигателя може да надвиши допустимата честота и това може да доведе до злополука - двигателят работи "извън ред".
При DCT с паралелно свързана възбуждаща намоткауспоредно с намотката на котвата, наречена шунт
(W1 - W2, Фиг. 98, c).
Двигателите с паралелно възбуждане осигуряват стабилна скорост при различни натоварвания и възможност за плавно регулиране на тази скорост. Следователно DCT с паралелно възбуждане се използват за електрическо задвижване, което изисква постоянна скорост при различни натоварвания.
и плавно широко регулиране на него. Z1
DCT със смесено възбуждане имат най-висок стартов момент и се използват там, където са необходими значителни стартови моменти или са възможни краткотрайни претоварвания и големи ускорения - например за стартиране на компресори.
В зависимост от изискванията, паралелните и последователните възбудителни намотки могат да бъдат свързани "съответно" или "срещу". При "съгласно" включване магнитните потоци на намотките са насочени по същия начин и се сумират, с "брояч" - те се изваждат.
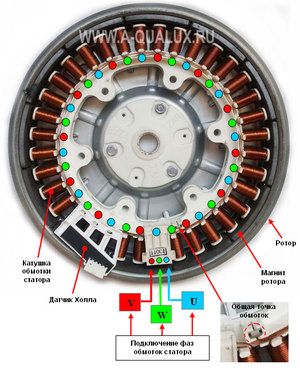
Не всеки електродвигател може недвусмислено да се нарече способен да работи на постоянен ток. Отнася се за типа колектор. Устройството, принципът на работа на DC електродвигател, се основава на него. Статорът се състои от набор от намотки, всяка от които работи само върху ограничена част от дъгата на вала. В противен случай концепцията не може да бъде реализирана.
Работа на колекторен двигател
Колекторните двигатели се използват навсякъде от домакинските уреди. 90% от домашните приложения са в този сегмент. Двигатели за перални, прахосмукачки, електроинструменти. Изключение, да наречем хладилници, вентилатори, вентилатори, някои абсорбатори. Причинени от изискванията за мълчание. Който е чувал как се движи малка акумулаторна кола, разбира. През нощта можете да чуете всяко шумолене, колекторен двигателби вдигнала врява. Опитайте да включите мелницата за една-две секунди в шест сутринта - ще разберете.
Според закона нивото на звуковото налягане не надвишава 30 dB през нощта. В противен случай техниката ще пречи спокоен сън. Шумът се причинява от триенето на четките върху колектора, роторът на двигателя е сравнително тежък, най-малкото несъответствие се дава в лагерите. Има луфт, подвижната част е по-масивна, акустичният ефект е по-забележим. Колекторните двигатели имат много недостатъци, но могат да работят с постоянен ток. За да намалите размерите, намалете броя на намотките. Необходими са минимум три полюса, за да се определи уникално посоката на въртене и те никога не работят паралелно.
Колекторният двигател на домакинските уреди има голям брой роторни полюси. По-долу е даден опростен чертеж за DC. Колекторният двигател работи в подобен режим, има повече статорни магнити, всички са електрически. Захранването се осигурява от променливо напрежение от 220 волта. Елате до основната тайна! Няма значение колекторният двигател да се захранва с променлив постоянен ток. От гледна точка на лаика. Има някои характеристики:
- При захранване с постоянен ток ефективността се увеличава. Входящата мощност е пропорционално намалена, като се постига по-голяма ефективност на използване. Намотката на статора е оборудвана с не два - три извода. При захранване с постоянен ток се използват част от завоите. Променливият ток преминава през цялата намотка на статора.
- При постоянни полета ефектът на обръщане на намагнитването изчезва. Драстично намалява нагряването на електрическата стомана на магнитните вериги на DC двигателя. Това се отразява в ниските изисквания към изработката на носещата основа на ротора и статора. Възможно е магнитопроводите да не се разделят на плочи с лакова изолация. Както и да е, повечето DC колекторни двигатели са подходящи и за AC работа. Магнитните вериги са съставени от пластини от електротехническа стомана.
- Косвен плюс е по-високата скоростна стабилност. За регулиране на скоростта на въртене при постоянен ток се използва промяна в амплитудата на напрежението, при променлив ток част от синусоидата по протежение на захранващата линия се прекъсва с помощта на тиристорен ключ. Последната опция се използва от перални машини.
- Обратното на променлив ток се извършва чрез превключване на намотките. Промяна на посоката на включване един спрямо друг. Процедури в пералняизпълняват специални релета. В двигателите с постоянен ток полюсът на статора се заменя с железен (неодимов) магнит. Достатъчно е да промените полярността на захранването, за да получите обратното. Операцията може да се извърши с помощта на реле или контактор. Ако намотките се захранват с електричество, прекомутацията се използва за промяна на посоката на въртене на вала.
В колекторния двигател на домакинските уреди статорът е свързан последователно с ротора. За прехвърляне на енергия към вала се използва колектор на ток под формата на барабан, разделен на секции. Като електроди ще служат графитни четки със затягащи пружини. На корпуса изводите на статора и ротора са разделени, което дава възможност за реализиране на реверсната функция. Сред контактите може да има спомагателни: три изхода на сензора на Хол (два тахометъра), края на термичния предпазител.
Докато валът се върти, четките постепенно преминават към следващата секция, полюсът на ротора се измества. Статорът остава на същото място. Моля, имайте предвид, че полярността се променя с двойна честота на мрежата (50 Hz), характерът на взаимодействието остава същият. Като полюсите отблъскват, за разлика от полюсите привличат. Благодарение на специалното разпределение на намотката, комутация с колектора, се осигурява желаната посока на въртене. Проявява се независимостта на двигателя от вида на захранващото напрежение (DC или AC). Някои характеристики на колекторното оборудване, които са уникални за този тип устройство, прочетете по-долу.
Когато четките се движат през барабана, се генерира искра.
Принцип на действие
Варисторите се използват за гасене на искри.
Стойността на ЕМП нараства до неприемливи размери, защитното съпротивление намалява с десетки хиляди пъти, излишният ток се свързва на късо от корпуса. Варисторите се използват по двойки. Комбинирайте двете четки през корпуса на колекторния двигател. Щепселите на прахосмукачки често са лишени от заземяващ терминал, те успешно се доставят с варисторна защита. Искрата е затворена от стоманена кутия, поради големи размери, няма масово отопление. Смъртно опасно е да хванете с една ръка колекторен двигател с такива украшения, а с другата ръка да хванете заземени метални конструкции (пожарни стълби; водопроводни, канализационни, газопроводи; гръмоотводни гуми; оплетки от антенни кабели).
Свалящи се бузи по тялото
Калъфът на електрическия инструмент е снабден с подвижни бузи, четките се сменят за минути. Спестява проблемите с разглобяването на инструмента за Поддръжка. Признак за износване на четката е силно искрене. Оборудването е износено. Новите четки имат много искри при триене. При износване се наблюдава спад на мощността. Свредлото спира да върти свредлото, барабанът на пералнята спира на номиналното тегло на зареденото пране. Не винаги е възможно да получите оригинални четки, компонентите могат да бъдат заточени до необходимия размер с шлифовъчен инструмент.
Искрящи революции, застой
При мръсен барабан се наблюдават искрене, задръстване. Роторът се сваля и почиства с подходящ препарат (спирт).
Устройството на постояннотоковия двигател не се различава от моделите, работещи под променливо напрежение. Горното се отнася за всякакъв вид оборудване.
Работа на постояннотоков двигател
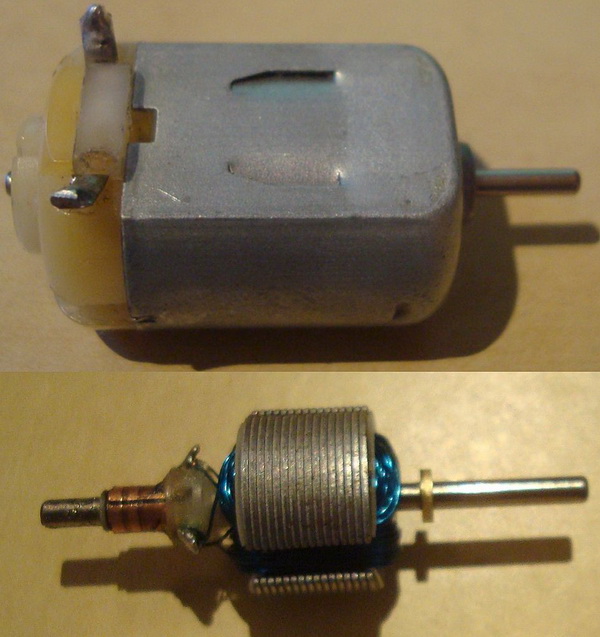
Под токоприемника на най-простия двигател има две секции. Колекторният барабан е дегенерирал. Всяка контактна ламела (плоча на вала) прави половин оборот. Едната четка се захранва с положителен потенциал, втората с отрицателен, като посоката на магнитното поле на полюсите се променя съответно. Две са активни по всяко време (в конструкцията, описана по-горе). Статорът може да бъде образуван от постоянно електрическо поле или метален магнит. Последният се използва от детски коли.
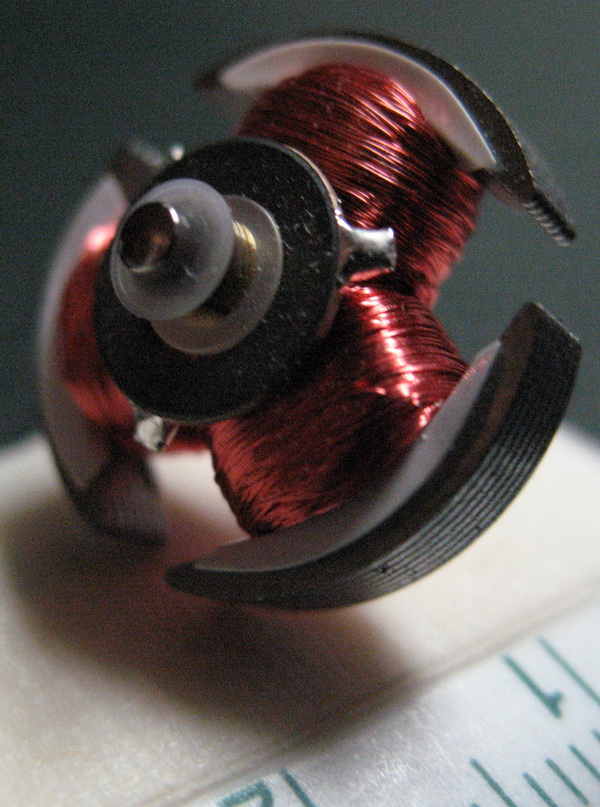
Как работи DC мотор. Да предположим, че в началния момент намотките са разположени, както е показано на фигурата. В нашия пример вече няма два полюса, както беше обсъдено по-горе, а три. Минималният брой за стабилен старт на DC електродвигател в желаната посока. Намотките са свързани чрез звездна верига, всяка двойка има една обща точка. Силата на полето образува два отрицателни полюса, единият положителен. Постоянният магнит стои, както е показано на фигурата.
![]()
Опростен чертеж на корпуса на DC
На всеки трети оборот полето се преразпределя така, че полюсите се изместват според промяната на захранващото напрежение на ламелите. На втората диаграма виждаме: номерата на намотките са се изместили, картината в пространството е останала. Залог за стабилност: единият полюс се привлича от постоянен магнит, вторият се отблъсква. Ако трябва да получите реверс, полярността на свързване на батерията (акумулатора) се променя. Резултатът е два положителни полюса, един отрицателен. Валът ще се движи обратно на часовниковата стрелка.
Вярваме, че принципът на работа на DC електродвигател вече е ясен. Добавяме, че двигателите с клапани са често срещани днес. Мнозина мислеха, че за да се редуват полетата на статора, роторът ще бъде постоянен магнит. Като първо приближение двигател с клапани. Постоянният ток се подава към желаните намотки на статора чрез комутирани тиристорни ключове. В резултат на това се създава желаното разпределение на полето.
Предимствата на схемата са в намаляването на броя на триещите се части, които причиняват необходимостта от поддръжка и ремонт. Блокът за управление на тиристора е доста сложен. Разрешено е да се организира превключване с помощта на ламели. В същото време дизайнът ще служи като груб сензор за положение на вала (плюс или минус разстоянието между контактните площадки на оста на вала). Клапанните двигатели не са нови. Широко използван в специфични индустрии. Помага за точно поддържане на честотата на въртене. В ежедневието безчетковите двигатели са трудни за намиране. Известно сходство може да се види в пералнята. Говорим за дренажна помпа (роторът е магнитен, само променлив ток).
Техническите характеристики на постояннотокови двигатели са по-добри, отколкото при захранване с променлив ток. Класът на устройството е широко използван. По-често се използват постояннотокови двигатели, когато се захранват от различни видове батерии. Когато няма избор. Предимствата на захранващата верига ще позволят на батериите да издържат по-дълго.
Намотките на статора и ротора са свързани последователно, паралелно. Последното се прилага, когато валът е натоварен в изходно състояние. Има рязко увеличение на скоростта, което може да доведе до негативни последици, ако роторът се движи твърде лесно. Те споменаха подобни тънкости в темата за проектиране на двигатели със собствените си ръце.
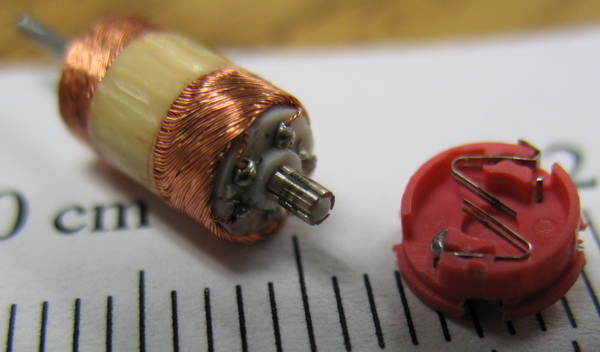
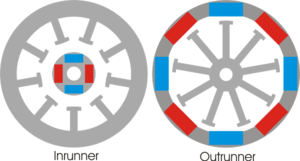
DC моторът е електрически двигател, който се захранва от постоянен ток. Ако е необходимо, вземете двигател с висок въртящ момент и относително ниска скорост. Структурно Inrunners са по-прости поради факта, че неподвижният статор може да служи като корпус. Към него могат да се монтират монтажни устройства. При Outrunners цялата външна част се върти. Двигателят е закрепен с неподвижна ос или статорни части. В случай на моторно колело, закрепването се извършва за неподвижната ос на статора, проводниците се довеждат до статора през куха ос, която е по-малка от 0,5 mm.
Има следните видове двигатели с постоянен ток:
AC двигател се нарича електрически двигател, захранван от променлив ток. Има следните видове AC двигатели:
Има и UKD (универсален колекторен двигател) с функция за режим на работа както на променлив, така и на постоянен ток.
Друг тип двигател е стъпков двигател с краен брой позиции на ротора. Определено указано положение на ротора се фиксира чрез захранване на необходимите съответни намотки. Когато захранващото напрежение се отстрани от една намотка и се прехвърли към други, възниква процес на преход към друга позиция.
AC мотор, когато се захранва от търговска мрежа, обикновено не постига скорости над три хиляди оборота в минута. Поради тази причина, когато е необходимо да се получат по-високи честоти, се използва колекторен двигател, чиито допълнителни предимства са лекота и компактност при запазване на необходимата мощност.
 Понякога се използва и специален предавателен механизъм, наречен мултипликатор, който променя кинематичните параметри на устройството до необходимите технически показатели. Колекторните възли понякога заемат до половината от пространството на целия двигател, така че двигателите с променлив ток са намалени по размер и с по-леко тегло чрез използването на честотен преобразувател, а понякога и благодарение на наличието на мрежа с повишена честотадо 400 Hz.
Понякога се използва и специален предавателен механизъм, наречен мултипликатор, който променя кинематичните параметри на устройството до необходимите технически показатели. Колекторните възли понякога заемат до половината от пространството на целия двигател, така че двигателите с променлив ток са намалени по размер и с по-леко тегло чрез използването на честотен преобразувател, а понякога и благодарение на наличието на мрежа с повишена честотадо 400 Hz.
Всеки ресурс асинхронен двигателпроменливият ток е значително по-висок от колектора. Определено е състояние на изолацията на намотките и лагерите. Синхронният двигател, когато се използва инвертор и сензор за положение на ротора, се счита за електронен аналог на класически колекторен двигател, който поддържа работа с постоянен ток.
Безчетков DC мотор. Обща информация и устройство на устройството
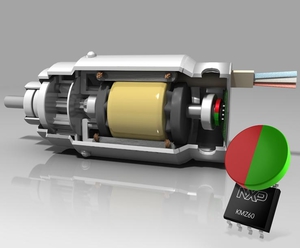 Безчетковият постояннотоков двигател се нарича още трифазен безчетков двигател. Това е синхронно устройство, чийто принцип на действие се основава на самосинхронизирано регулиране на честотата, поради което се управлява векторът (започвайки от положението на ротора) на магнитното поле на статора.
Безчетковият постояннотоков двигател се нарича още трифазен безчетков двигател. Това е синхронно устройство, чийто принцип на действие се основава на самосинхронизирано регулиране на честотата, поради което се управлява векторът (започвайки от положението на ротора) на магнитното поле на статора.
Моторните контролери от този тип често се захранват от постоянно напрежениеот което са получили името си. В англоезичната техническа литература безчетковият двигател се нарича PMSM или BLDC.
Безчетковият мотор е създаден предимно за оптимизиране на всеки DC двигателв общи линии. Бяха поставени много високи изисквания към задвижващия механизъм на такова устройство (особено при високоскоростен микродиск с прецизно позициониране).
Това може би доведе до използването на такива специфични DC устройства, безчеткови трифазни двигатели, наричан още BDPT. Те са почти идентични по дизайн. синхронни двигателипроменлив ток, където въртенето на магнитния ротор се извършва в конвенционален ламиниран статор в присъствието на трифазни намотки, а броят на оборотите зависи от напрежението и натоварванията на статора. Въз основа на определени координати на ротора се превключват различни намотки на статора.
 Безчетковите постояннотокови двигатели могат да съществуват без отделни сензори, но понякога те присъстват на ротора, като например сензор на Хол. Ако устройството работи без допълнителен сензор, тогава намотките на статора действат като фиксиращ елемент. Тогава токът възниква поради въртенето на магнита, когато роторът индуцира ЕМП в намотката на статора.
Безчетковите постояннотокови двигатели могат да съществуват без отделни сензори, но понякога те присъстват на ротора, като например сензор на Хол. Ако устройството работи без допълнителен сензор, тогава намотките на статора действат като фиксиращ елемент. Тогава токът възниква поради въртенето на магнита, когато роторът индуцира ЕМП в намотката на статора.
Ако една от намотките е изключена, тогава индуцираният сигнал ще бъде измерен и допълнително обработен, но такъв принцип на работа е невъзможен без професор по обработка на сигнала. Но за обръщане или спиране на такъв електродвигател не е необходима мостова верига - достатъчно е да подадете управляващи импулси в обратна последователност към намотките на статора.
При VD (превключен двигател) индукторът под формата на постоянен магнит е разположен на ротора, а намотката на котвата е на статора. Въз основа на позицията на ротора, се формира захранващото напрежение на всички намоткиелектрически мотор. Когато се използва в такива конструкции на колектора, неговата функция ще се изпълнява в двигателя на клапана от полупроводников ключ.
Основната разлика между синхронните и безчетковите двигатели е самосинхронизирането на последния с помощта на DPR, което определя пропорционалната честота на въртене на ротора и полето.
Най-често безчетковият DC двигател намира приложение в следните области:

статор
Това устройство има класически дизайн и наподобява същото устройство на асинхронна машина. Съставът включва медна намотка(положен по периметъра в жлебовете), което определя броя на фазите и корпуса. Обикновено фазите на синуса и косинуса са достатъчни за въртене и самозапускане, но често двигателят на вентила се прави трифазен и дори четирифазен.
Електрическите двигатели с обратна електродвижеща сила според вида на навиване на намотката на статора се разделят на два вида:
- синусоидална форма;
- трапецовидна форма.
В съответните видове двигатели електрическият фазов ток също се променя според метода на захранване синусоидално или трапецовидно.
Ротор
 Обикновено роторът е направен от постоянни магнити с две до осем двойки полюси, които от своя страна се редуват от север на юг или обратно.
Обикновено роторът е направен от постоянни магнити с две до осем двойки полюси, които от своя страна се редуват от север на юг или обратно.
Най-често срещаните и най-евтини за производството на ротора са феритните магнити, но техният недостатък е ниско нивомагнитна индукция, следователно устройства, направени от сплави на различни редкоземни елементи, сега заместват такъв материал, тъй като те могат да осигурят високо нивомагнитна индукция, което от своя страна позволява да се намали размерът на ротора.
ДНР
Сензорът за положение на ротора осигурява обратна връзка. Според принципа на работа устройството е разделено на следните подвидове:
- индуктивен;
- фотоелектрически;
- Сензор за ефект на Хол.
Последният тип е най-популярен поради своята почти абсолютни безинерционни свойстваи способността да се отървете от забавянето в каналите за обратна връзка чрез позицията на ротора.
Контролна система
Системата за управление се състои от превключватели на мощността, понякога също от тиристори или мощни транзистори, включително изолиран затвор, водещ до събиране на токов инвертор или инвертор на напрежение. Най-често се прилага процесът на управление на тези ключове с помощта на микроконтролер, което изисква огромно количество изчислителни операции за управление на двигателя.
Принцип на действие
Работата на двигателя се състои в това, че контролерът превключва определен брой намотки на статора по такъв начин, че векторът на магнитните полета на ротора и статора да е ортогонален. С PWM (широчинно-импулсна модулация) контролерът управлява тока, протичащ през двигателяи регулира въртящия момент, упражняван върху ротора. Посоката на този действащ момент се определя от знака на ъгъла между векторите. При изчисленията се използват електрически градуси.
 Превключването трябва да се извършва по такъв начин, че Ф0 (потокът на възбуждане на ротора) да се поддържа постоянен спрямо потока на котвата. При взаимодействие на такова възбуждане и потока на котвата се образува въртящ момент М, който се стреми да завърти ротора и паралелно да осигури съвпадението на възбуждането и потока на котвата. Въпреки това, по време на въртенето на ротора, различните намотки се превключват под въздействието на сензора за положение на ротора, в резултат на което потокът на котвата се обръща към следващата стъпка.
Превключването трябва да се извършва по такъв начин, че Ф0 (потокът на възбуждане на ротора) да се поддържа постоянен спрямо потока на котвата. При взаимодействие на такова възбуждане и потока на котвата се образува въртящ момент М, който се стреми да завърти ротора и паралелно да осигури съвпадението на възбуждането и потока на котвата. Въпреки това, по време на въртенето на ротора, различните намотки се превключват под въздействието на сензора за положение на ротора, в резултат на което потокът на котвата се обръща към следващата стъпка.
В такава ситуация резултантният вектор се измества и става неподвижен по отношение на роторния поток, което от своя страна създава необходимия въртящ момент върху вала на двигателя.
Управление на двигателя
Контролерът на безчетков електродвигател с постоянен ток регулира момента, действащ върху ротора, като променя стойността на широчинно-импулсната модулация. Превключването се контролира и извършвани по електронен път, за разлика от обичайното четков моторпостоянен ток. Също така често срещани са системите за управление, които прилагат широчинно-импулсна модулация и алгоритми за регулиране на ширината на импулса за работния процес.
 Двигателите с векторно управление осигуряват най-широкия известен диапазон за самоконтрол на скоростта. Регулирането на тази скорост, както и поддържането на връзката на потока на необходимото ниво, се дължи на честотния преобразувател.
Двигателите с векторно управление осигуряват най-широкия известен диапазон за самоконтрол на скоростта. Регулирането на тази скорост, както и поддържането на връзката на потока на необходимото ниво, се дължи на честотния преобразувател.
Характеристика на регулирането на електрическото задвижване, базирано на векторно управление, е наличието на контролирани координати. Те са във фиксирана система и превърнати във въртящи се, подчертавайки постоянна стойност, пропорционална на контролираните параметри на вектора, поради което се формира управляващо действие и след това обратният преход.
Въпреки всички предимства на такава система, тя е придружена и от недостатък под формата на сложност на управлението на устройството за управление на скоростта в широк диапазон.
Предимства и недостатъци
В днешно време в много индустрии този тип двигател е много търсен, тъй като безчетковият DC двигател съчетава почти всички най- най-добри качествабезконтактни и други видове двигатели.
Безспорните предимства на безчетковия мотор са:
Въпреки значителните позитиви, безчетков DC моторсъщо има няколко недостатъка:

Въз основа на горното и недостатъчното развитие на съвременната електроника в региона, мнозина все още смятат за подходящо използването на конвенционален асинхронен двигател с честотен преобразувател.
Трифазен безчетков DC двигател
Този тип двигател има отлична производителност, особено при извършване на управление с помощта на сензори за положение. Ако моментът на съпротива варира или изобщо не е известен, а също и ако е необходимо да се постигне по-висок стартов въртящ моментизползва се сензорно управление. Ако сензорът не се използва (обикновено при вентилатори), управлението елиминира необходимостта от кабелна комуникация.
Характеристики на управление на трифазен безчетков двигател без датчик за положение:

Контролни функции трифазен безчетков двигателс позиционен енкодер на примера на сензор с ефект на Хол:

Заключение
Безчетковият DC двигател има много предимства и ще бъде достоен избор за използване както от специалист, така и от обикновен неспециалист.
Има две позиции на ротора (две "мъртви точки"), от които е невъзможно самозапускане и неравномерен въртящ момент, в първото приближение (магнитното поле на полюсите на статора B е равномерно (хомогенно) и т.н.) равна на
Където - броят на намотките на намотката на ротора, - индукцията на магнитното поле на полюсите на статора, - токът в намотката на ротора [A], - дължината на работната част на намотката на намотката [m], - разстоянието от оста на ротора до работната част на завоя на намотката на ротора (радиус) [m], - синус от ъгъла между посоката на север-южния полюс на статора и същата посока в ротора [rad], - ъглова скорост[рад/сек], - време [сек].
Поради наличието на ъгловата ширина на четките и ъгловата междина между плочите (ламелите) на колектора в двигателя на тази конструкция има части от намотката на ротора, които са динамично постоянно късо съединение от четките. Броят на късо съединените части на намотката на ротора е равен на броя на четките. Тези късо съединени части от намотката на ротора не участват в генерирането на общия въртящ момент.
Общата клетка на ротора в двигатели с един колектор е равна на:
![]() , където n е броят на четките, alfa е ъгловата ширина на една четка [радиан].
, където n е броят на четките, alfa е ъгловата ширина на една четка [радиан].
Без да се вземат предвид частите на въртящия момент, съединени накъсо от четките, средният въртящ момент s на рамките (обороти) с ток на оборот е равен на площта под интегралната крива на въртящия момент, разделена на дължината на периода (1 оборот =):
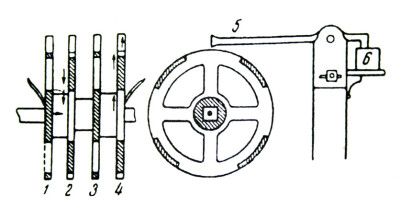
Ориз. 2 DC колекторен двигател с двуполюсен статор и триполюсен ротор
Двигателят на фиг. 2 се състои от един електромагнит на статора (двуполюсен статор) с ясно изразени полюси и една намотка, триполюсен ротор с ясно изразени полюси и три намотки (намотките на ротора могат да бъдат свързани в звезда или триъгълник), четков колектор монтаж с три плочи (ламели) и с две четки. Самостартирането е възможно от всяко положение на ротора. Той има по-малък неравномерен въртящ момент от двигател с двуполюсен ротор (фиг. 1).
Съкращението DCT (DC motor) е неудачно, тъй като името "AC motor" има същото съкращение - DCT. Но тъй като AC двигателите са разделени на асинхронни (AD) и синхронни (SD), съкращението DPT се нарича DC двигатели.
статор
Без да се вземат предвид частите от въртящия момент, съединени накъсо от четките, средният въртящ момент за оборот (период) е равен на площта под интегралната крива на въртящия момент, разделена на дължината на периода:
С s обороти в намотката
Два контура с ток в еднородно магнитно поле на полюсите на статора
Ако инсталирате втора рамка на ротора на машината, изместена спрямо първата под ъгъл π / 2, тогава получавате четириполюсен ротор. Момент от втория кадър:
Общият момент на двата кадъра:
Така се оказва, че въртящият момент зависи от ъгъла на въртене на ротора, но неравностите са по-малки, отколкото при една рамка. Освен това се добавя самостартиране от всяка позиция на ротора. В този случай втората рамка ще изисква втори колектор (възел четка-колектор). И двата възела са свързани паралелно, докато превключването на тока в рамката се извършва в интервали с най-нисък ток в рамката, с серийна връзкапревключване на ток в една от рамките (прекъсване на веригата) възниква по време максимален токв друг кадър. На практика, поради факта, че ъгловата ширина на четката α [rad] е малко по-малка от ъгловата ширина на пролуката β [rad] между колекторните плочи (ламели), осем малки части под кривата на въртящия момент, равна на
 , където Δ = β − α , не участват в създаването на общия въртящ момент.
, където Δ = β − α , не участват в създаването на общия въртящ момент.
Рамка с ток в нееднородно магнитно поле на полюсите на статора
Ако магнитното поле на полюсите на статора е неравномерно и се променя по отношение на прътите на рамката съгласно закона
Тогава въртящият момент за един прът ще бъде равен на
за две пръчки
за рамка от рулони
Четирите части под кривата на въртящия момент са равни на
 .
.
Без да се вземат предвид частите от въртящия момент, съединени накъсо от четките, средният въртящ момент за оборот (период) е равен на площта под интегралната крива, разделена на дължината на периода:
С s обороти в намотката
Два контура с ток в неравномерно магнитно поле на полюсите на статора
За втората (косинусова) рамка,
въртящ момент от втората (косинусова) рамка ще бъде равен на
общият въртящ момент от двете рамки е равен на
Тези. е постоянна и не зависи от ъгъла на завъртане на ротора.
На практика, поради празнината, осемте малки части под кривата на въртящия момент са равни
 всеки
всеки
не участват в създаването на въртящ момент.
Роторът е постоянен магнит и намотките на статора се превключват електронни схеми- инвертори. Безчетковите двигатели могат да бъдат еднофазни (две "мъртви точки"), двуфазни (синус-косинус), три- или повече фази.
Безчетков постояннотоков двигател с токоизправител (мост) може да замени универсален колекторен двигател (UKD).
Управление на DPT
Механична характеристика на DPT
Зависимостта на честотата от момента на DCT вала. Показва се като графика. По хоризонталната ос (абсцисата) е моментът на вала на ротора, по вертикалната ос (ордината) е скоростта на ротора. Механичната характеристика на DPT е права линия с отрицателен наклон.
Механичната характеристика на DCT се изгражда при определено захранващо напрежение на намотките на ротора. В случай на конструиране на характеристики за няколко стойности на захранващото напрежение се говори за семейство DCT механични характеристики.
Регулираща характеристика DPT
Зависимост на скоростта на ротора от захранващото напрежение на роторните намотки на постояннотоковия двигател. Показва се като графика. По хоризонталната ос (абсцисата) е захранващото напрежение на намотките на ротора, по вертикалната ос (ордината) е скоростта на ротора. Контролната характеристика на DPT е права линия с положителен наклон.
Контролната характеристика на DPT се изгражда в определен момент, разработен от двигателя. В случай на конструиране на контролни характеристики за няколко стойности на въртящия момент на вала на ротора, се говори за семейство контролни характеристики на DPT.