तुल्यकालिक डीसी मोटर्स। तेल और गैस का बड़ा विश्वकोश। तुल्यकालिक रैखिक स्टेपर मोटर्स
एक या दूसरे को विद्युत उपकरणकाम किया, इसके लिए एक विशेष ड्राइव तंत्र की आवश्यकता होती है। ऐसा ही एक तंत्र है स्टेपर मोटर। इस सामग्री में, आप सीखेंगे कि यह क्या है, इसके संचालन का क्या सिद्धांत है और इसे किन श्रेणियों में विभाजित किया गया है।
स्टेपर मोटर एकध्रुवीय या द्विध्रुवी हो सकती है। यह एक इलेक्ट्रिक और ब्रशलेस डीसी मोटर है जो एक पूर्ण क्रांति को कई समान चरणों में विभाजित करने में सक्षम है। इसमें निम्नलिखित विवरण शामिल हैं:
आदर्श वर्तमान जनरेटर एक वर्तमान जनरेटर को इस प्रतीक द्वारा दर्शाया जा सकता है, जहां तीर की दिशा वर्तमान की दिशा को इंगित करती है: एक आदर्श जनरेटर। घटक जिनमें निश्चित विद्युत बलविद्युत जनित्र कहलाते हैं। वे विद्युत घटनाओं और एक अलग प्रकृति की घटनाओं के बीच बातचीत का घर हैं, जो ऊर्जा के अन्य रूपों से रूपांतरण द्वारा बिजली उत्पादन का एहसास करते हैं। वे सक्रिय द्विध्रुव हैं, उनके पास टर्मिनल हैं जो अन्य विद्युत घटकों से कनेक्शन की अनुमति देते हैं, और दो श्रेणियों में आते हैं: वर्तमान-से-वर्तमान।

स्टेपर मोटर मुख्य रूप से निम्नलिखित उद्देश्यों के लिए उपयोग की जाती है:
- मिलिंग मशीन का काम;
- पीसने की मशीन का काम;
- विभिन्न घरेलू उपकरणों के संचालन को सुनिश्चित करता है;
- औद्योगिक यांत्रिक साधनों का कार्य;
- परिवहन प्रदान करता है।
आदर्श वोल्टेज जनरेटर एक वोल्टेज जनरेटर को निम्नलिखित प्रतीकों में से एक द्वारा इंगित किया जा सकता है। वर्तमान जनरेटर का प्रतिनिधित्व। किस प्रकार के जनरेटर हैं? विशाल हवा के खेतपावर ग्रिड से जुड़े सैकड़ों व्यक्तिगत पवन टर्बाइनों से मिलकर बनता है। अपतटीय पवन अधिक स्थिर होती है, अधिक ऊर्जा प्रदान करती है और इसका दृश्य प्रभाव कम होता है, लेकिन निर्माण लागत और रखरखावउल्लेखनीय रूप से उच्च। छोटे तटवर्ती पवन फार्म पृथक स्थानों में बिजली प्रदान करते हैं।
ड्राइव सिद्धांत
 इस ड्राइव के संचालन का सिद्धांत इस प्रकार है। जब टर्मिनलों पर वोल्टेज लगाया जाता है, तो स्टेपर मोटर पर ब्रश लगातार चलने लगते हैं। यन्त्र निष्क्रिय चालएक अद्वितीय संपत्ति है: it आने वाली दालों को परिवर्तित करता हैसंलग्न ड्राइव शाफ्ट की पूर्व निर्धारित स्थिति के लिए, मुख्य रूप से आयताकार अभिविन्यास वाले।
इस ड्राइव के संचालन का सिद्धांत इस प्रकार है। जब टर्मिनलों पर वोल्टेज लगाया जाता है, तो स्टेपर मोटर पर ब्रश लगातार चलने लगते हैं। यन्त्र निष्क्रिय चालएक अद्वितीय संपत्ति है: it आने वाली दालों को परिवर्तित करता हैसंलग्न ड्राइव शाफ्ट की पूर्व निर्धारित स्थिति के लिए, मुख्य रूप से आयताकार अभिविन्यास वाले।
बिजली कंपनियां तेजी से छोटे घरेलू पवन टर्बाइनों द्वारा उत्पादित अधिशेष बिजली खरीद रही हैं। पवन ऊर्जा एक वैकल्पिक जीवाश्म ईंधन ऊर्जा है जो समृद्ध, नवीकरणीय और हरित अर्थव्यवस्था द्वारा समर्थित है, व्यापक, स्वच्छ है, संचालन के दौरान ग्रीनहाउस गैसों का उत्सर्जन नहीं करती है और इसके लिए अत्यधिक उच्च की आवश्यकता होती है भूमि का भाग. पर्यावरण आम तौर पर कम समस्याग्रस्त है वातावरण. हवा के झोंके, ये अच्छे दिग्गज हमेशा चलते रहते हैं, आकर्षण और जिज्ञासु में असमर्थ होते हैं।
आने वाले प्रत्येक आवेग एक निश्चित कोण पर शाफ्ट को स्थानांतरित करने में सक्षम हैं। इस तरह के गियरबॉक्स से लैस उपकरणों में अधिकतम दक्षता होती है, बशर्ते कि कई गियर इलेक्ट्रोमैग्नेट हों जो लोहे के एक केंद्रीय टुकड़े के आसपास स्थित हों, जिसमें गियर का आकार हो। बाहरी नियंत्रण सर्किट विद्युत चुंबक को सक्रिय करता है। यदि मोटर शाफ्ट को चालू करना आवश्यक है, तो जिस विद्युत चुंबक पर ऊर्जा लगाई जाती है, वह पहिया के दांतों को आकर्षित करता है। जब वे विद्युत चुंबक के साथ संरेखित होते हैं, तो वे मोटर के बाद के चुंबकीय भाग के संबंध में ऑफसेट होते हैं।
स्टेपर मोटर्स के प्रकार
और इसलिए, संदेह करने के लिए, हम बताएंगे कि वे कैसे काम करते हैं। सबसे पहले, हम दो प्रकार के पवन टर्बाइनों को अलग करके शुरू करते हैं: ऊर्ध्वाधर अक्ष और क्षैतिज अक्ष। आधुनिक पवन खेतों में आमतौर पर देखे जाने वाले टर्बाइनों में एक टॉवर और तीन क्षैतिज अक्ष ब्लेड होते हैं, जिनसे उनका नाम लिया जाता है। कम आम ऊर्ध्वाधर अक्ष टर्बाइन हैं, पूर्व की तुलना में कम कुशल हैं, लेकिन वे सभी दिशाओं में हवा को निर्देशित करने में सक्षम हैं, और हल्की हवाओं के साथ भी वे जल्दी से घूम सकते हैं।
तुल्यकालिक रैखिक स्टेपर मोटर्स
इनमें एक केंद्रीय टावर होता है जिसके चारों ओर लंबवत ब्लेड होते हैं। विद्युत मोटर प्रत्यावर्ती धाराएक विद्युत मोटर है जो प्रत्यावर्ती धारा का उपयोग करके संचालित हो सकती है। केवल स्टेटर वाइंडिंग के साथ ये मोटर इस प्रकार के लिए सबसे अधिक उपयोग की जाने वाली बिजली आपूर्ति में से एक हैं और कई पहलुओं में विभाजित हैं: चरणों की संख्या तीन चरण मोटर.
पहला इलेक्ट्रोमैग्नेट बंद हो जाता है, और फिर दूसरा चालू हो जाता है, जिसके बाद पिछले पहिये के साथ संरेखित करते हुए गियर घूमना शुरू कर देता है। फिर यह क्रिया दोहराई जाती है।आवश्यक संख्या बार। इनमें से प्रत्येक घुमाव को एक स्थिर चरण कहा जाता है, और एक स्टेपर मोटर की घूर्णी गति की गणना इसकी क्रांति को पूरा करने के लिए आवश्यक चरणों की संख्या की गणना करके की जा सकती है।
तीन-चरण प्रेरण मोटर एक अतुल्यकालिक तीन-चरण मोटर में स्टेटर चुंबक एक तीन-चरण मोटर एक प्रकार की विद्युत मोटर होती है जिसके लिए धाराओं की तीन-चरण प्रणाली की आवश्यकता होती है, जो समय और स्थान में 120 ° के कोण के साथ चरणबद्ध होती है। एसिंक्रोनस मोटर एक एसी मोटर है, कोणीय गतिइसका रोटर स्टेटर वाइंडिंग द्वारा उत्पन्न चुंबकीय क्षेत्र के रोटेशन की गति से कम है, जिसमें से यह अतुल्यकालिक है। एक इंडक्शन मोटर को इसके कार्य सिद्धांत के कारण इंडक्शन मोटर भी कहा जाता है जैसा कि नीचे वर्णित है।
स्टेपर मोटर के संचालन को नियंत्रित करने के लिए एक विशेष ड्राइवर का उपयोग किया जाता है। यह उन मामलों में आवश्यक है जहां आप मशीन को संचालित करने के लिए ड्राइव स्थापित कर रहे हैं या इसका उपयोग पवन जनरेटर शुरू करने के लिए कर रहे हैं।
स्टेपर मोटर्स के प्रकार
स्टेपर मोटर्स को निम्न प्रकारों में विभाजित किया गया है:
स्टेपर मोटर को जोड़ने की विशेषताएं
एक इंडक्शन मोटर का उपयोग कैपेसिटर के उपयोग के साथ या बिना अल्टरनेटर के रूप में किया जा सकता है, यह इस बात पर निर्भर करता है कि यह मेन से जुड़ा है या नहीं। इसका उपयोग छोटी शक्तियों के लिए उन स्थितियों में किया जाता है जहां प्रदर्शन की कीमत पर भी सिंक्रोनस मोटर के उपयोग में आसानी को प्राथमिकता दी जाती है।
एक एकल-चरण मोटर एक प्रकार की विद्युत मोटर है जिसमें विद्युत चरण और एक तटस्थ तार के साथ विद्युत लाइन के उपयोग की आवश्यकता होती है, इन मोटरों में अलग-अलग अनुप्रयोग और डिज़ाइन हो सकते हैं, आमतौर पर गैर-विद्युत विशेषता दो-चरण मोटर्स को ध्यान में रखते हुए इन मोटरों को चलाने के लिए उपयोग किया जाता है, जहां वे एक संधारित्र का उपयोग करके दूसरा चरण प्राप्त करते हैं।
- एक स्थायी चुंबक के साथ;
- तुल्यकालिक हाइब्रिड ड्राइव;
- परिवर्तनशील मोटर।
वे सभी अपने काम के सिद्धांतों सहित एक दूसरे से कुछ अलग हैं।
उदाहरण के लिए, स्थायी चुंबक ड्राइव रोटर में एक विशेष चुंबकीय भाग से सुसज्जित होते हैं। ऐसा इंजन आकर्षण या प्रतिकर्षण के सिद्धांत पर काम करते हैंइलेक्ट्रोमैग्नेट पर आधारित मोटर का स्टेटर और रोटर।
सिंक्रोनस मोटर एक कम उपयोग की जाने वाली सिंगल-फेज मोटर है जिसे स्टेटर चुंबकीय क्षेत्र के साथ सिंक्रनाइज़ किए गए चुंबकीय क्षेत्र द्वारा प्रेरित चुंबकीय क्षेत्र द्वारा विशेषता वाले कई अनुप्रयोगों को दिया जाता है, जो तब उसी आवृत्ति पर घूमता है। जब वाइंडिंग से करंट प्रवाहित होता है, तो रोटर के चारों ओर एक चुंबकीय क्षेत्र बनाया जाता है। रोटर के बाएँ भाग को बाएँ चुंबक द्वारा दूर फेंक दिया जाता है और दाईं ओर खींचा जाता है। इसी तरह, नीचे दाईं ओर। युगल रोटेशन उत्पन्न करता है। जब आर्मेचर क्षैतिज रूप से संरेखित होता है, तो स्विच घुमावदार के माध्यम से वर्तमान की दिशा को उलट देता है, चुंबकीय क्षेत्र को भी बदलता है।
चर इंजन में एक पारंपरिक लोहे का रोटर होता है और इसका संचालन मौलिकता के सिद्धांत पर बनाया गया है। जब न्यूनतम अंतराल के साथ न्यूनतम स्तर के प्रतिकर्षण की अनुमति दी जाती है, जबकि रोटर के बिंदुओं में स्टेटर ध्रुवों के लिए आकर्षण होता है।
लेकिन एक हाइब्रिड ड्राइव ऑपरेशन के दोनों सिद्धांतों को जोड़ सकती है, इसे स्टेपर मोटर्स का सबसे महंगा मॉडल माना जाता है।
एक रैखिक मोटर एक विद्युत मोटर है जिसमें रोटर और स्टेटर, गोलाकार होने के बजाय, "चारों ओर मुड़ते हैं" और टोक़ बनाने के बजाय, वे एक रैखिक बल बनाते हैं। रैखिक मोटर्स के लिए कई डिज़ाइन समाधान हैं, जिन्हें दो श्रेणियों में विभाजित किया जा सकता है: कम त्वरण और उच्च त्वरण।
प्रमुख इंजन विनिर्देश
इलेक्ट्रिक मोटर प्रस्तुति। इलेक्ट्रिक वाहन अलग हो सकते हैं और जरूरतों के आधार पर या डिज़ाइन विशेषताएँ 1, 2, 3, 4 या अधिक पहियों पर। सबसे आम वाहन प्रकार क्या हैं? इलेक्ट्रिक मोटरसाइकिल, शून्य मोटरसाइकिल एक इलेक्ट्रिक स्कूटर या इलेक्ट्रिक मोटरसाइकिल एक दो या तीन पहियों वाला वाहन है जो उपयोग करता है विद्युत इंजनआंदोलन के लिए।
दो चरण स्टेपर मोटर्स
 दो-चरण मोटर बहुत सरल है, इसे बिना किसी विशेष अनुभव के व्यक्ति द्वारा स्थापित किया जा सकता है। चाहे आपने इसे स्वयं इकट्ठा किया हो या इसे शेल्फ से खरीदा हो, इसमें दो प्रकार की कॉइल वाइंडिंग होती है:
दो-चरण मोटर बहुत सरल है, इसे बिना किसी विशेष अनुभव के व्यक्ति द्वारा स्थापित किया जा सकता है। चाहे आपने इसे स्वयं इकट्ठा किया हो या इसे शेल्फ से खरीदा हो, इसमें दो प्रकार की कॉइल वाइंडिंग होती है:
लेख पॉलीफ़ेज़ एसिंक्रोनस मोटर्स, मोटर्स में यादृच्छिक ओवरकुरेंट और शॉर्ट टर्म टोक़ अधिभार से संबंधित है एकदिश धाराऔर पॉलीफ़ेज़ सिंक्रोनस मोटर्स। इन मशीनों को नियंत्रण और सुरक्षा उपकरणों के साथ मिलाने के लिए रोटरी मशीनों की वर्तमान अधिभार क्षमता का संकेत दिया गया है। घुमावदार मशीनों में थर्मल प्रभाव लगभग समय और दूसरी वर्तमान शक्ति के परिणामस्वरूप भिन्न होता है। रेटेड वर्तमान से अधिक वर्तमान तापमान में वृद्धि करेगा। जब तक अन्यथा न कहा जाए, यह माना जा सकता है कि मशीन अपने जीवनकाल के दौरान केवल कुछ ही समय के लिए वर्तमान अधिभार पर काम करेगी।
- एकध्रुवीय;
- द्विध्रुवी।
यदि एक स्टेपर मोटर में प्रत्येक चरण को प्रभावित करने वाले केंद्रीय चुंबकीय नल के साथ एक वाइंडिंग होती है, तो यह एक यूनिपोलर ड्राइव है। चुंबकीय क्षेत्र की सही दिशा सुनिश्चित करने के लिए प्रत्येक घुमावदार खंड को चालू किया जाना चाहिए। इस ड्राइव में, चुंबकीय ध्रुव अतिरिक्त स्विचिंग की आवश्यकता के बिना कार्य करने में सक्षम है, इसलिए वर्तमान दिशा और सर्किट स्विचिंग को बहुत सरल बनाया गया हैप्रत्येक वाइंडिंग के लिए एक ट्रांजिस्टर का उपयोग करना। निम्नलिखित चरण परिवर्तनों को ध्यान में रखा जाता है:
यदि एसी मशीन का उपयोग जनरेटर के रूप में किया जाना है न कि मोटर के रूप में, तो ओवरलोडिंग एक समझौते का विषय होना चाहिए। 315 kW तक की रेटेड पावर और 1 kV तक के रेटेड वोल्टेज वाले मोटर्स पॉलीफ़ेज़ मोटर्स का सामना करना चाहिए: कम से कम 2 मिनट के लिए रेटेड करंट के 1.5 गुना के बराबर करंट। 315 kW से अधिक और सभी के लिए रेटेड पावर वाले पॉलीफ़ेज़ मोटर्स के लिए एकल चरण मोटर्सकोई आकस्मिक अतिप्रवाह नहीं है।
मोटरों का क्षणिक मरोड़ वाला अधिभार
निम्नलिखित स्थितियों के उपयुक्त संयोजन के तहत स्विच को 60 के लिए रेटेड वर्तमान के 1.5 गुना का सामना करना चाहिए। पॉलीफ़ेज़ अतुल्यकालिक मोटर्सऔर डीसी मोटर्स मोटर्स, उनके लोड और डिज़ाइन के प्रकार की परवाह किए बिना, बिना रुके या टॉर्क अधिभार में अचानक परिवर्तन के बिना 15 सेकंड का सामना करना चाहिए, उनके रेटेड टोक़ का 60%, वोल्टेज और आवृत्ति के साथ बनाए रखा नाममात्र मूल्य. डीसी मोटर्स के लिए, टोक़ को ओवरकुरेंट के संदर्भ में व्यक्त किया जाना चाहिए।
- प्रति चरण तीन तार;
- प्रति उत्पादन छह।
ट्रांजिस्टर को एक विशेष क्रम में सक्रिय करने के लिए ड्राइव मोटर माइक्रोकंट्रोलर का उपयोग किया जा सकता है।
और वाइंडिंग को ड्राइव के स्थायी चुम्बकों के साथ कनेक्शन तारों को छूकर भी जोड़ा जा सकता है। कॉइल टर्मिनलों को जोड़ते समय, शाफ्ट को मोड़ना मुश्किल होगा। कॉइल एंड और कॉमन वायर के बीच प्रतिरोध आधे प्रतिरोध के बराबरतार और तार समाप्त होता है। ऐसा इसलिए दिखता है क्योंकि आम तारयह है बड़ी लंबाईकॉइल को जोड़ने के लिए इस्तेमाल किए गए आधे टुकड़े की तुलना में।
उच्च टोक़ की आवश्यकता वाले विशेष अनुप्रयोगों के लिए अभिप्रेत मोटर्स का मिलान किया जाना चाहिए। एसिंक्रोनस शॉर्ट-सर्किट मोटर्स के मामले में विशेष रूप से 4.5 गुना अधिक से कम एक प्रारंभिक वर्तमान प्राप्त करने के लिए डिज़ाइन किया गया वर्तमान मूल्यांकित, टोक़ अधिभार पहले पैराग्राफ में दिए गए मान के 60% से कम हो सकता है, लेकिन 50% से कम नहीं।
विशेष प्रकार के एसिंक्रोनस मोटर्स के मामले में विशेष प्रारंभिक विशेषताओं के साथ, जैसे कि चर गति मोटर्स या स्थिर कन्वर्टर्स द्वारा संचालित एसिंक्रोनस मोटर्स, ओवरटॉर्क मान पर सहमति होनी चाहिए। जब तक अन्यथा निर्दिष्ट नहीं किया जाता है, एक पॉलीफ़ेज़ सिंक्रोनस मोटर 15 सेकंड के लिए लोड की परवाह किए बिना, रेटेड लोड के अनुरूप मूल्य पर उत्तेजना बनाए रखते हुए सिंक्रनाइज़ेशन के नुकसान के बिना नीचे वर्णित अधिभार टोक़ का सामना करेगा।
बाइपोलर स्टेपर मोटर्स में एक फेज वाइंडिंग होती है, जिसमें एक चुंबकीय ध्रुव का उपयोग करके उलटे तरीके से करंट की आपूर्ति की जाती है। इस मामले में नियंत्रण प्रणाली एक कनेक्टिंग ब्रिज का उपयोग करके जटिल होगी। प्रति चरण दो तार हैं, लेकिन वे आम नहीं हैं। उच्च आवृत्तियों पर स्टेपर मोटर सिग्नल को मिलाकर, सिस्टम के घर्षण प्रभाव को कम किया जा सकता है।
इसके अलावा, एक अन्य प्रकार की स्टेपर मोटर तीन-चरण है, लेकिन इसका दायरा बहुत संकीर्ण है:
- सीएनसी मिलिंग मशीनों के संचालन के दौरान;
- कुछ वाहनों पर जहां थ्रॉटल वाल्व का उपयोग किया जाता है;
- कुछ ब्रांडों के ड्राइव और प्रिंटर पर।
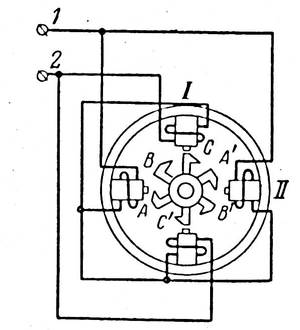
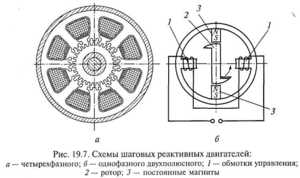
प्रतिक्रियाशील स्टेपर मोटर्स: संचालन की विशेषताएं और सिद्धांत
 यह ध्यान देने योग्य है कि सक्रिय स्टेपर ड्राइव में एक बड़ी खामी है: यह एक बड़ा कदम है, जो कई दसियों डिग्री तक पहुंचता है। इसके विपरीत, प्रतिक्रियाशील स्टेपर मोटर्स रोटर आवृत्ति को कम करने में सक्षम हैं, जिसके कारण चरण एक डिग्री से कम कोणीय हो जाता है।
यह ध्यान देने योग्य है कि सक्रिय स्टेपर ड्राइव में एक बड़ी खामी है: यह एक बड़ा कदम है, जो कई दसियों डिग्री तक पहुंचता है। इसके विपरीत, प्रतिक्रियाशील स्टेपर मोटर्स रोटर आवृत्ति को कम करने में सक्षम हैं, जिसके कारण चरण एक डिग्री से कम कोणीय हो जाता है।
जेट ड्राइव की मुख्य विशेषता यह है कि दांतों को स्टेटर पोल पर रखा जाता है। इसमें सिंक्रोनाइज़िंग पल ड्राइव के अनुप्रस्थ और अनुदैर्ध्य अक्ष के साथ चुंबकीय प्रतिरोध में अंतर द्वारा प्रदान किया जाता है।
प्रतिक्रियाशील स्टेपर मोटर में एक प्रमुख दोष है: it कोई सिंक्रनाइज़िंग टोक़ नहींयदि स्टेटर वाइंडिंग डी-एनर्जीकृत हैं।
इंजन की कमी की डिग्री को बढ़ाना संभव है, चाहे सक्रिय या प्रतिक्रियाशील, मल्टी-पैकेज संरचनाओं का उपयोग करके, जब स्टेटर दांत विभाजन के हिस्से से एक दूसरे की ओर स्थानांतरित हो जाते हैं, और प्रत्येक पैकेज का रोटर नहीं करता है चलते हैं और उनके ध्रुवों की कुल्हाड़ियाँ समान होती हैं। एक जैसा निर्माण के मामले में डिजाइन बहुत जटिल हैऔर तैयार रूप में सस्ता नहीं है, इसके लिए एक जटिल स्विच की भी आवश्यकता होगी।
आज तक, बिक्री पर आप विभिन्न इंजन डिज़ाइनों की एक बड़ी संख्या पा सकते हैं, जो इस तरह के मापदंडों में भिन्न हैं:
- चरणों की संख्या;
- घुमावदार प्लेसमेंट प्रकार;
- रोटर को ठीक करने के तरीके, आदि।
प्रारंभ करनेवाला स्टेपर मोटर्स में, टोक़ एक चुंबकीय क्षेत्र की बातचीत द्वारा बनाया जाता है, जो स्टेटर वाइंडिंग्स द्वारा बनाया जाता है, और अंतराल के दांत वाले हिस्से में स्थित एक स्थायी चुंबक होता है।
एक प्रारंभ करनेवाला मोटर में सिंक्रोनाइज़िंग टॉर्क स्वयं प्रतिक्रियाशील होता है, जिसके परिणामस्वरूप स्टेटर वाइंडिंग होती है, जबकि स्थायी चुंबक एक फिक्सिंग टॉर्क का उत्पादन करने में सक्षम होता है, जिससे रोटर को जगह में रखा जाता है। मनचाहा पदबिना करंट के।
एक प्रतिक्रियाशील स्टेपर मोटर के विपरीत, एक प्रारंभ करनेवाला, एक समान कदम के साथ, एक बड़ा सिंक्रोनाइज़िंग टॉर्क होता है, साथ ही साथ अधिक बेहतर होता है विशेष विवरण.
तुल्यकालिक रैखिक स्टेपर मोटर्स
 एक उद्यम में कुछ उत्पादन प्रक्रियाओं को स्वचालित करने के लिए, कभी-कभी वस्तुओं को एक विमान में स्थानांतरित करना आवश्यक हो जाता है। यह करने के लिए आपको एक विशेष कनवर्टर का उपयोग करने की आवश्यकता हैट्रांसलेशनल में घूर्णी गति, जो किनेमेटिक्स को लागू करके हासिल की जाती है।
एक उद्यम में कुछ उत्पादन प्रक्रियाओं को स्वचालित करने के लिए, कभी-कभी वस्तुओं को एक विमान में स्थानांतरित करना आवश्यक हो जाता है। यह करने के लिए आपको एक विशेष कनवर्टर का उपयोग करने की आवश्यकता हैट्रांसलेशनल में घूर्णी गति, जो किनेमेटिक्स को लागू करके हासिल की जाती है।
रैखिक स्टेपर मोटर्स के साथ, आप पल्स कमांड को सीधे में बदल सकते हैं रैखिक गति, जो विभिन्न इलेक्ट्रिक ड्राइव की गतिज योजना को बहुत सरल करेगा।
इस ड्राइव में स्टेटर को चुंबकीय रूप से नरम प्लेट के रूप में प्रस्तुत किया जाता है, और तारों को स्थायी चुंबक के संचालन द्वारा चुंबकित किया जाता है।
स्टेटर और मूविंग पार्ट में दांतों का विभाजन समान होता है, जबकि उन्हें आधे भाग द्वारा स्थानांतरित किया जा सकता हैएक रोटर तार के भीतर। इस मामले में पूर्वाग्रह प्रवाह और इसका चुंबकीय प्रतिरोध, इस बात पर निर्भर नहीं करता है कि मोटर का गतिमान भाग कहाँ स्थित है।
किसी वस्तु को समतल में दो निर्देशांकों के अनुसार स्थानांतरित करने के लिए दो-निर्देशांक प्रकार के इंजनों का उपयोग किया जाता है।
इसके अलावा रैखिक मोटर्स में चुंबकीय वायु निलंबन का उपयोग किया जाता है। चुंबकीय आकर्षण बल के कारण रोटर स्टेटर की ओर आकर्षित होता है। आगे हवा को रोटर के नीचे नोजल के माध्यम से उड़ाया जाता हैएक संकुचित रूप में, जिसके परिणामस्वरूप एक बल प्रकट होता है जो रोटर को स्टेटर से पीछे हटा देता है। तो उनके बीच एक एयर कुशन होता है और रोटर स्टेटर पर न्यूनतम निकासी के साथ लटकता है। यह रोटर की गति और उच्च-सटीक स्थिति के लिए न्यूनतम प्रतिरोध प्रदान करता है।
 ड्राइव स्थिर रूप से संचालित करने में सक्षम है बशर्ते कि कोण से बाहर काम करने के दौरान कदमों का कोई नुकसान न हो जब पल्स ट्रेनों को नियंत्रण वाइंडिंग पर लागू किया जाता है। प्रत्येक चरण के दौरान रोटर में एक आश्वस्त संतुलन हैसे संबंधित चुंबकीय प्रेरण के वेक्टर के संबंध में चुंबकीय क्षेत्रस्टेटर
ड्राइव स्थिर रूप से संचालित करने में सक्षम है बशर्ते कि कोण से बाहर काम करने के दौरान कदमों का कोई नुकसान न हो जब पल्स ट्रेनों को नियंत्रण वाइंडिंग पर लागू किया जाता है। प्रत्येक चरण के दौरान रोटर में एक आश्वस्त संतुलन हैसे संबंधित चुंबकीय प्रेरण के वेक्टर के संबंध में चुंबकीय क्षेत्रस्टेटर
प्रत्येक चरण को संसाधित करने का तरीका ड्राइव वाइंडिंग पर लागू होने वाले नियंत्रण दालों की संख्या के अनुरूप होना चाहिए, और साथ ही, अगली पल्स आने तक, इसे दिए गए रोटेशन के कोण को काम करना चाहिए। प्रत्येक चरण की शुरुआत में, कोणीय मोटर वेग शून्य होना चाहिए।
स्थापित मूल्य के संबंध में कोणीय ड्राइव शाफ्ट के दोलनों की अनुमति है। वे गतिज ऊर्जा की उपस्थिति के कारण होते हैं, जो मोटर शाफ्ट द्वारा कोने से बाहर काम करने के दौरान जमा होती है। इस मामले में, ऊर्जा जिसे नुकसान में परिवर्तित किया जा सकता है:
- चुंबकीय;
- यांत्रिक;
- विद्युत।
उनका मूल्य जितना बड़ा होगा, ड्राइव द्वारा एक कदम आगे बढ़ने की संक्रमण प्रक्रिया उतनी ही तेजी से समाप्त होगी।
स्टार्टअप पर, रोटर स्टेटर फ्लक्स से एक कदम या उससे भी अधिक पीछे रह सकता है, जिसके परिणामस्वरूप रोटर चरणों की संख्या और स्टेटर फ्लक्स के बीच एक विसंगति हो सकती है।
स्टेपर मोटर की मुख्य विशेषताएं हैं:
- अंतिम यांत्रिक विशेषता;
- उठाना।
सीमित विशेषता नियंत्रण दालों की आवृत्तियों पर अधिकतम संभव सिंक्रोनाइज़िंग टॉर्क की निर्भरता है।
और पिकअप इन दालों की आवृत्ति है, जो प्रसंस्करण के दौरान एक कदम के नुकसान या जोड़ की संभावना को समाप्त करता है। उठाना एक प्रमुख संकेतक माना जाता हैइंजन में संक्रमण मोड। यह सिंक्रोनाइज़िंग टॉर्क, पिच रिडक्शन, रैखिक रूप से विस्थापित या घुमाए गए कणों के जड़त्वीय क्षण के साथ-साथ प्रतिरोध के स्थिर क्षण के साथ बढ़ने में सक्षम है।
स्टेपर मोटर को जोड़ने की विशेषताएं
 आप एक स्टेपर प्रकार की मोटर को एक या किसी अन्य योजना के अनुसार जोड़ सकते हैं, जो तारों की संख्या और प्रारंभ विधियों पर निर्भर करता है।
आप एक स्टेपर प्रकार की मोटर को एक या किसी अन्य योजना के अनुसार जोड़ सकते हैं, जो तारों की संख्या और प्रारंभ विधियों पर निर्भर करता है।
मोटर्स में चार से आठ तार हो सकते हैं। यदि उनमें से केवल चार हैं, तो इंजन का उपयोग केवल द्विध्रुवीय उपकरण के साथ ही संभव है। प्रत्येक चरण घुमावदार, जिनमें से केवल दो हैं, दो तारों से सुसज्जित हैं। वायर्ड जोड़े को मीटर का उपयोग करके निर्धारित किया जाना चाहिए, फिर ड्राइवर कदम से कदम जुड़ा हुआ है।
छह तारों से सुसज्जित मोटर में प्रत्येक वाइंडिंग के लिए दो तार और उनमें से प्रत्येक के लिए एक केंद्रीय नल भी शामिल है। इसे एकध्रुवीय और द्विध्रुवी दोनों उपकरणों से जोड़ा जा सकता है। स्प्लिट ड्राइव के लिए विशेष उपकरण का उपयोग किया जाना चाहिए।मापने के लिए। एक यूनिपोलर डिवाइस के लिए, ड्राइव को सभी छह तारों का उपयोग करके जोड़ा जा सकता है, और एक यूनिपोलर डिवाइस के लिए प्रत्येक वाइंडिंग से एक छोर और एक केंद्रीय नल पर्याप्त होगा।
पांच-तार मोटर व्यावहारिक रूप से पिछले एक से भिन्न नहीं होती है, हालांकि, इसके केंद्रीय टर्मिनल अंदर से एक ठोस केबल के रूप में जुड़े होते हैं और एक तार से एक आउटपुट होता है। वाइंडिंग को एक दूसरे से अलग न करें, अन्यथा आप उन्हें तोड़ सकते हैं। इसके बजाय, तार के केंद्र की पहचान करना और इसे अन्य कंडक्टरों से जोड़ना बेहतर है, यह सबसे कुशल कनेक्शन समाधान होगा। उसके बाद, आप डिवाइस को स्वयं कनेक्ट कर सकते हैं और इसे संचालन के लिए जांच सकते हैं।
प्रमुख इंजन विनिर्देश
 डायरेक्ट करंट पर प्राइमरी वाइंडिंग बनाता है रेटेड वोल्टेज. और ड्राइव टॉर्क की शुरुआती गति करंट के साथ बदलती रहती है। उच्च गति पर रैखिक टोक़ को कम करने का समय इस बात पर निर्भर करता है कि मोटर सर्किट क्या है और इसकी वाइंडिंग के अधिष्ठापन पर। IP65 सुरक्षा वाले कुछ ब्रांड के मोटर्स सबसे कठिन परिस्थितियों में काम करने में सक्षम हैं।
डायरेक्ट करंट पर प्राइमरी वाइंडिंग बनाता है रेटेड वोल्टेज. और ड्राइव टॉर्क की शुरुआती गति करंट के साथ बदलती रहती है। उच्च गति पर रैखिक टोक़ को कम करने का समय इस बात पर निर्भर करता है कि मोटर सर्किट क्या है और इसकी वाइंडिंग के अधिष्ठापन पर। IP65 सुरक्षा वाले कुछ ब्रांड के मोटर्स सबसे कठिन परिस्थितियों में काम करने में सक्षम हैं।
यदि आप घरेलू उत्पादन का तैयार स्टेपर मोटर मॉडल चुनना चाहते हैं, मुख्य तकनीकी विशेषताओं पर ध्यान देंसबसे प्रसिद्ध मॉडल:
- ShD-1 - चरण की डिग्री 15, 4 चरण है, टोक़ 40 Nt है;
- डीएसएच-0.04 ए - डिग्री चरण 22.5, 4 चरण, टोक़ 100 एनटी;
- डीएसएचआई 200 - डिग्री चरण 1.8, 4 चरण, टोक़ 0.25 एनटी;
- डीएसएच -6 - चरण डिग्री - 18, 4 चरण, टोक़ 2300 एनटी।
खरीदारों के बीच भी लोकप्रिय ऐसे मॉडल हैं:
- चार चरण डीएसएचआर -40;
- एसएम-200-0.22;
- एनकोडर के साथ प्योरलॉजिक आर एंड डी;
- नेमा 23;
- एसटीएच-39डी1112;
- एसपी -57;
- SanyoDenkiSM28.
चयन करते समय वांछित इंजन, शक्ति, वोल्टेज और टोक़ के मापदंडों की गणना करना आवश्यक है।
स्टेपर मोटर के संचालन के साथ समस्याओं में से एक नियंत्रक की अनुपस्थिति में उपकरणों का नियंत्रण है। इससे निपटने के लिए, आपको चाहिए एक विशेष तार्किक कनेक्शन ब्लॉक लें, जो उपयुक्त माइक्रोक्रिकिट के अभाव में इंजन को नियंत्रित करने में मदद करता है। हालांकि, एक विशेष नियंत्रक का उपयोग करके स्टेपर मोटर्स के संचालन को नियंत्रित करना सबसे अच्छा है।
रूस और यूक्रेन के बड़े शहरों में एक स्टेपर ड्राइव की औसत लागत
इस उपकरण की लागत सीधे ऐसे संकेतकों पर निर्भर करती है जैसे:

एकध्रुवीय स्टेपर मोटर की औसत लागत है:
- मास्को - 3000 अमरीकी डालर;
- सेंट पीटर्सबर्ग - 3500 अमरीकी डालर;
- कीव - 3500 अमरीकी डालर;
- खार्किव - 4000 घन मीटर
तो, हमने बताया कि स्टेपर मोटर क्या है, यह किस सिद्धांत पर काम करती है, इसे किन श्रेणियों में विभाजित किया गया है और यह किन गुणों से भिन्न है। हमें उम्मीद है कि इससे आपके लिए यह चुनना आसान हो जाएगा कि आपको इस डिवाइस को कब खरीदना है।
पेज 3
VNIIPTmash ट्रैक्शन व्हील्स के मुख्य आयाम और विशेषताएं तालिका में दी गई हैं। 6.2. चार-पोल इलेक्ट्रिक मोटर को एक एकीकृत विद्युत चुम्बकीय ब्रेक के साथ एक दो-पोल इलेक्ट्रिक मोटर के साथ बदलकर, ट्रॉली की गति को 2 गुना बढ़ाया जा सकता है, और जब इलेक्ट्रिक मोटर्स का उपयोग ध्रुवों की एक चर संख्या के साथ किया जाता है, तो संचालन के दो चरण गति प्राप्त की जा सकती है।
| भूमिगत क्लस्टर की योजना। |
सबमर्सिबल स्क्रू इलेक्ट्रिक पंपों की स्थापना में, 1500 आरपीएम (सिंक्रोनस) की शाफ्ट गति वाले चार-पोल इलेक्ट्रिक मोटर्स का उपयोग किया जाता है, और सबमर्सिबल सेंट्रीफ्यूगल इलेक्ट्रिक पंपों की स्थापना में, 3000 आरपीएम की शाफ्ट गति वाले दो-पोल इलेक्ट्रिक मोटर्स का उपयोग किया जाता है।
ये सभी कम्प्रेसर सिंगल-सिलेंडर हैं, जिनका सिलेंडर व्यास 36 मिमी, पिस्टन कोड 19 मिमी, पिस्टन द्वारा वर्णित मात्रा, 0 87 डीएम 3 - एस है। तीन-चरण दो-पोल इलेक्ट्रिक मोटर्स AVK2 - 0 7 का उपयोग किया जाता है; AEC2 - 0.7 और AEC2 - 1 (क्रमशः), जिनकी विशेषताएं तालिका में दी गई हैं। वी-14.
ईपीयू में पिकअप के स्वचालित नियंत्रण के लिए एक तंत्र है। ईपीयू एक एसिंक्रोनस सिंगल-फेज टू-पोल इलेक्ट्रिक मोटर से काम करता है जिसमें कैपेसिटर स्टार्ट-अप रोटर स्पीड 2800 आरपीएम है। पृष्ठभूमि के स्तर को कम करने के लिए, विद्युत मोटर एक पर्मलोय स्क्रीन में संलग्न है।
यदि, उदाहरण के लिए, दो-पोल इलेक्ट्रिक मोटर के स्टेटर में 12 स्लॉट हैं, तो प्रति पोल छह स्लॉट हैं, और इन छह स्लॉट्स को इस पोल को बनाने वाले सभी तीन चरणों के कॉइल पक्षों को समायोजित करना चाहिए। इसलिए, घुमावदार सर्किट को डिजाइन और ड्राइंग करते समय, प्रति पोल और चरण में स्लॉट की संख्या एक विशेषता और निर्णायक मूल्य है।
के साथ संरक्षित और बंद हवादार इलेक्ट्रिक मोटर्स समान मूल्यशक्ति और रोटेशन की गति में समान स्थापना आयाम हैं। इसका अपवाद सामान्य नियमएक बंद, हवादार डिज़ाइन में दो-पोल इलेक्ट्रिक मोटर हैं, जिसमें संरक्षित डिज़ाइन में बिजली इलेक्ट्रिक मोटर की तुलना में एक कदम कम है। इसी समय, 14, 28, 55 और 100 kW की शक्ति पर 6, 7, 8 और 9 आयामों के द्विध्रुवी इलेक्ट्रिक मोटर्स A और AO के लिए, स्थापना आयाम समान हैं।
हम डीसी मोटर्स के साथ गणना शुरू करते हैं, क्योंकि उनकी गणना एसी मोटर्स की तुलना में सरल और स्पष्ट है। यहां सभी परिकलित मूल्यों का विस्तृत विवरण दिया गया है, जो तब एसी मोटर्स में मिलेगा। श्रृंखला उत्तेजना के साथ दो-पोल इलेक्ट्रिक मोटर्स के लिए गणना दी गई है।
स्क्रू इलेक्ट्रिक पंप का भी उपयोग किया जाता है, जो बाहरी रूप से पारंपरिक ईएसपी से अलग नहीं होते हैं। इस मामले में, कुओं से सतह तक तेल की आपूर्ति एक केन्द्रापसारक द्वारा नहीं, बल्कि एक स्क्रू (एकल-पेंच) पंप द्वारा की जाती है। ऐसे पंपों में, 1500 आरपीएम की शाफ्ट गति वाले चार-पोल सिंक्रोनस इलेक्ट्रिक मोटर्स का उपयोग किया जाता है, और पारंपरिक ईएसपी में, 3000 आरपीएम की शाफ्ट गति वाले दो-पोल इलेक्ट्रिक मोटर्स का उपयोग किया जाता है।
ब्रश को कम्यूटेटर की सतह के खिलाफ दबाया जाना चाहिए। ब्रश धारकों के लिए यही है। पतले तार से बना एक सर्पिल स्प्रिंग ब्रश के ऊपर रखा जाता है। ट्यूब के ऊपर एक टोपी 5 खराब कर दी जाती है, जो ब्रश और स्प्रिंग को ट्यूब से बाहर गिरने से बचाती है। ब्रश धारक को मोटर आवास की दीवार में दबाया जाता है। टू-पोल मोटर में ब्रश के साथ दो ब्रश होल्डर होने चाहिए। उन्हें स्थापित किया जाना चाहिए ताकि ब्रश इलेक्ट्रिक मोटर के चुंबकीय प्रणाली के ध्रुवों के बीच हों। ब्रश धारकों को एक दूसरे से और मोटर आवास से अलग किया जाना चाहिए। करंट को निकालने के लिए, एक इंसुलेटेड कंडक्टर को ब्रश होल्डर को खराब या मिलाप करना चाहिए।