सिंगल-फेज इलेक्ट्रिक मोटर्स के प्रकार। एकल-चरण अतुल्यकालिक मोटर्स। उपकरण और संचालन का सिद्धांत
3-7. अतुल्यकालिक सिंगल-फेज इलेक्ट्रिक मोटर्स का उपकरण
अंजीर पर। 3-16 AOLB प्रकार के एक अतुल्यकालिक एकल-चरण इलेक्ट्रिक मोटर के उपकरण को एक अंतर्निहित प्रारंभिक रोकनेवाला के साथ दिखाता है। इलेक्ट्रिक मोटर के स्टेटर को इलेक्ट्रिकल स्टील 15 की स्टैम्प्ड शीट से इकट्ठा किया जाता है, जिसे डबल दीवारों के साथ एक एल्यूमीनियम शेल (स्टेटर हाउसिंग) में दबाया और डाला जाता है। स्टेटर की सतह को ठंडा करने के लिए दीवारों के बीच चैनल बनते हैं। स्टेटर हाउसिंग को तेज करने के लिए एल्यूमीनियम मिश्र धातु से बने दो कवर 2 और 17 लगाए गए हैं।
अंत में छेद वाली एक मुद्रांकित टोपी 18 को सामने के कवर 17 पर रखा गया है। इन छिद्रों के माध्यम से, जब रोटर घूमता है, रोटर शाफ्ट के अंत में लगा पंखा 19 हवा लेता है। पंखे को एल्यूमीनियम मिश्र धातु से कास्ट किया जाता है और एक स्क्रू के साथ शाफ्ट पर लगाया जाता है।
स्टेटर शीट्स में, 24 नाशपाती के आकार के खांचे पर मुहर लगाई जाती है। इनमें से 16 स्लॉट्स पर वर्किंग वाइंडिंग के तारों का कब्जा है, और 8 स्लॉट्स पर स्टार्टिंग वाइंडिंग के तारों का कब्जा है। वर्किंग और स्टार्टिंग वाइंडिंग के आउटपुट सिरों को टर्मिनल बॉक्स 11 में स्थित कॉन्टैक्ट स्क्रू 4 में लाया जाता है। रोटर कोर को इलेक्ट्रिकल स्टील की शीट 12 से इकट्ठा किया जाता है और शाफ्ट 1 के मध्य भाग की नालीदार सतह पर दबाया जाता है। एक एल्युमिनियम वाइंडिंग 14 को क्लोजिंग रिंग्स और फैन ब्लेड्स के साथ रोटर के खांचे में डाला जाता है। पंखे का उद्देश्य गर्म हवा को केस की ठंडी बाहरी दीवारों की ओर फेंकना है।

रोटर पर स्टार्टिंग वाइंडिंग का एक सेंट्रीफ्यूगल स्विच लगा होता है। इसमें काउंटरवेट 9 के साथ दो लीवर 7 होते हैं, जो एक्सल 8 पर बैठे होते हैं, जिन्हें चार पंखे के ब्लेड में दबाया जाता है। लीवर को प्लास्टिक की आस्तीन 5 पर पिन 6 से दबाया जाता है, जो शाफ्ट पर स्वतंत्र रूप से बैठता है। रोटर के त्वरण के दौरान, जब इसके रोटेशन की आवृत्ति नाममात्र के करीब पहुंचती है, तो केन्द्रापसारक बल की कार्रवाई के तहत काउंटरवेट कुल्हाड़ियों के चारों ओर लीवर को मोड़ते हैं।
इस मामले में, आस्तीन 5 दाईं ओर चलती है, वसंत 10 को संपीड़ित करती है, और वसंत संपर्क 4 जारी करती है, जो प्रारंभिक घुमावदार सर्किट को बंद कर देती है। यह संपर्क, जब रोटर स्थिर होता है, एक निश्चित संपर्क के साथ आस्तीन के अंत तक बंद हो जाता है।
चल और स्थिर संपर्क विद्युत मोटर 2 के पीछे के कवर पर एक इन्सुलेट बोर्ड पर लगाए जाते हैं। इस पर एक थर्मल रिले तय किया जाता है, जो अधिक गरम होने पर नेटवर्क से इलेक्ट्रिक मोटर को डिस्कनेक्ट कर देता है। स्टैंड 16 चार स्टड के साथ मोटर को माउंट करने के लिए उपयोग किया जाता है।
इलेक्ट्रिक मोटर को शामिल करने की योजना अंजीर में दिखाई गई है। 3-17.
मुख्य वोल्टेज को टर्मिनलों सी 1 और सी 2 को आपूर्ति की जाती है। इन क्लैंप से, संपर्कों के माध्यम से कार्यशील वाइंडिंग को वोल्टेज की आपूर्ति की जाती है थर्मल रिलेआरटी, एक घुमावदार, एक द्विधात्वीय प्लेट और संपर्कों से मिलकर। जब इलेक्ट्रिक मोटर को स्वीकार्य मान से अधिक गर्म किया जाता है, तो प्लेट झुक जाती है और संपर्क खोल देती है। शॉर्ट सर्किट की स्थिति में, थर्मल रिले वाइंडिंग के माध्यम से एक बड़ा करंट प्रवाहित होगा, प्लेट जल्दी से गर्म हो जाएगी और संपर्कों को खोल देगी। इस मामले में, काम कर रहे सी और शुरुआती पी वाइंडिंग को डी-एनर्जेट किया जाएगा, क्योंकि ये दोनों थर्मल रिले के माध्यम से संचालित होते हैं। इस प्रकार, थर्मल रिले मोटर को ओवरलोड और शॉर्ट सर्किट दोनों से बचाता है।
शुरुआती वाइंडिंग टर्मिनलों C 1 और C 2 से जम्पर C 2 -P 1, सेंट्रीफ्यूगल स्विच VTS, जम्पर VTS-RT, थर्मल रिले RT के कॉन्टैक्ट्स के माध्यम से संचालित होती है। इलेक्ट्रिक मोटर शुरू करते समय, जब रोटर नाममात्र के 70-80% की गति तक पहुंच जाता है, तो सेंट्रीफ्यूगल स्विच के संपर्क खुल जाएंगे और शुरुआती वाइंडिंग नेटवर्क से डिस्कनेक्ट हो जाएगी। जब इलेक्ट्रिक मोटर चालू किया जाता है, जब रोटर की गति कम हो जाती है, तो केन्द्रापसारक स्विच के संपर्क फिर से बंद हो जाएंगे और अगली शुरुआत के लिए शुरुआती घुमाव तैयार किया जाएगा।
अंजीर पर। 3-18 एबीई टाइप एसिंक्रोनस मोटर के डिजाइन को दिखाता है। ये मोटर स्थायी रूप से जुड़े सहायक घुमाव वाले नेटवर्क से जुड़े होते हैं, जिसके सर्किट में एक कैपेसिटर श्रृंखला में जुड़ा होता है (चित्र 3-9)। एबीई टाइप मोटर करते हैं कठोर आवास नहीं है और इसलिए उन्हें अंतर्निर्मित कहा जाता है। ड्राइव तंत्र के साथ, इलेक्ट्रिक मोटर्स को एक निकला हुआ किनारा या ब्रैकेट के साथ बांधा जाता है।
इलेक्ट्रिक मोटर का शरीर स्टेटर कोर 1 का एक पैकेज है, जिसे 0.5 मिमी की मोटाई के साथ विद्युत स्टील की चादरों से इकट्ठा किया जाता है। पैकेज को दबाया जाता है और दबाव में एल्यूमीनियम मिश्र धातु से भर दिया जाता है। स्टेटर के सिरों पर दबाव के छल्ले 5 और चार एल्यूमीनियम की छड़ें होती हैं जो उन्हें कसती हैं। स्टेटर स्लॉट्स में वर्किंग और ऑक्ज़िलरी वाइंडिंग के कॉइल 6 डाले जाते हैं। असर ढाल 4 दबाव के छल्ले 5 और . पर केंद्रित हैं 7. बेयरिंग शील्ड में रबर स्लीव 9 के माध्यम से, वाइंडिंग 8 के सिरों को नेटवर्क से जोड़ने के लिए बाहर लाया जाता है। असर वाली ढाल को चार स्टड के साथ कड़ा किया जाता है।
मोटर रोटर को इलेक्ट्रिकल स्टील की शीट से इकट्ठा किया जाता है और एल्यूमीनियम 2 से भरा जाता है। रोटर वाइंडिंग के साथ, मोटर को ठंडा करने के लिए पंखे के पंख डाले जाते हैं। रोटर दो बॉल बेयरिंग में घूमता है 3.
इलेक्ट्रिक मोटर्स में अक्षर और संख्यात्मक प्रकार के पदनाम होते हैं, उदाहरण के लिए, एबीई 041-2 इलेक्ट्रिक मोटर का अर्थ है: ए - एसिंक्रोनस, बी - बिल्ट-इन, ई - सिंगल-फेज,
4 आकार संख्या है, 1 स्टेटर कोर लंबाई की क्रम संख्या है और संख्या 2 एक डैश के माध्यम से ध्रुवों की संख्या है।
3-8. सिंक्रोनस सिंगल-फेज इलेक्ट्रिक मोटर्स
कुछ मामलों में, इलेक्ट्रिक मोटर्स की आवश्यकता होती है, जिसकी गति लोड की परवाह किए बिना सख्ती से स्थिर होनी चाहिए। जैसे, सिंक्रोनस इलेक्ट्रिक मोटर्स का उपयोग किया जाता है, जिसमें रोटर की गति हमेशा गति के बराबर होती है चुंबकीय क्षेत्रऔर (3-2) द्वारा निर्धारित किया जाता है। कई प्रकार के सिंक्रोनस मोटर्स हैं, दोनों तीन-चरण और एकल-चरण वर्तमान। केवल दो सबसे सरल प्रकार के सिंगल-फेज सिंक्रोनस इलेक्ट्रिक मोटर्स पर विचार किया गया है: प्रतिक्रियाशील और संधारित्र प्रतिक्रियाशील।

अंजीर पर। 3-19 सरल एकल-चरण अनिच्छा मोटर का एक संरचनात्मक आरेख दिखाता है, जिसे कला में ला कौर व्हील के रूप में जाना जाता है। स्टेटर 1 और रोटर 2 को इलेक्ट्रिकल स्टील की स्टैम्प्ड शीट से इकट्ठा किया जाता है। एक कॉइल स्टेटर पर घाव होता है, जो एकल-चरण प्रत्यावर्ती धारा नेटवर्क द्वारा संचालित होता है, जो एक स्पंदित चुंबकीय क्षेत्र बनाता है। जेट मोटर को इसका नाम इसलिए मिला क्योंकि चुंबकीय आकर्षण के दो बलों की प्रतिक्रियाओं के कारण रोटर घूमता है।
एक स्पंदनशील क्षेत्र के साथ, मोटर में कोई प्रारंभिक टोक़ नहीं होता है और इसे हाथ से चालू किया जाना चाहिए। रोटर के दांतों पर काम करने वाले चुंबकीय बल हर समय इसे स्टेटर के ध्रुवों के खिलाफ रखते हैं, क्योंकि इस स्थिति में चुंबकीय प्रवाह का प्रतिरोध न्यूनतम होगा। हालाँकि, जड़ता द्वारा रोटर इस स्थिति को उस समय से गुजरता है जब स्पंदन क्षेत्र कम हो जाता है। चुंबकीय क्षेत्र में अगली वृद्धि के साथ, चुंबकीय बल रोटर के दूसरे दांत पर कार्य करते हैं, और इसका घूर्णन जारी रहेगा। पाठ्यक्रम की स्थिरता के लिए, एक प्रतिक्रियाशील विद्युत मोटर के रोटर में एक बड़ी जड़ता होनी चाहिए।
प्रतिक्रियाशील इलेक्ट्रिक मोटर्स केवल 100-200 आरपीएम के क्रम की कम घूर्णी गति पर ही काम करती हैं। उनकी शक्ति आमतौर पर 10-15 वाट से अधिक नहीं होती है। रोटर की गति मुख्य आवृत्ति f और रोटर Z के दांतों की संख्या से निर्धारित होती है। चूंकि रोटर चुंबकीय प्रवाह को बदलने के एक आधे चक्र में एक क्रांति के 1/Z को घुमाता है, फिर 1 मिनट में 60 2 f आधा होता है -साइकिल, यह 60 2 f / Z क्रांतियों को चालू करेगा। 50 हर्ट्ज की प्रत्यावर्ती धारा आवृत्ति पर, रोटर की गति है:
![]()
टॉर्क बढ़ाने के लिए स्टेटर पर दांतों की संख्या बढ़ाएं। स्टेटर पर जितने दांत हैं उतने दांत बनाकर सबसे बड़ा प्रभाव प्राप्त किया जा सकता है। इस मामले में, चुंबकीय आकर्षण एक साथ दांतों की एक जोड़ी पर नहीं, बल्कि रोटर के सभी दांतों पर कार्य करेगा, और टोक़ में काफी वृद्धि होगी। ऐसे इलेक्ट्रिक मोटर्स में, स्टेटर वाइंडिंग में छोटे कॉइल होते हैं जो दांतों के बीच के अंतराल में स्टेटर रिम पर घाव होते हैं। पुराने प्रकार के इलेक्ट्रिक खिलाड़ियों में, स्टेटर और रोटर पर 77 दांतों के साथ ऐसी इलेक्ट्रिक मोटर का उपयोग किया जाता था, जो 78 आरपीएम की डिस्क रोटेशन गति प्रदान करती थी। रोटर डिस्क के साथ एक टुकड़ा था जिस पर प्लेट रखी गई थी। इलेक्ट्रिक मोटर शुरू करने के लिए, डिस्क को अपनी उंगली से धक्का देना आवश्यक था।
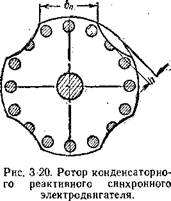
एक तुल्यकालिक संधारित्र अनिच्छा मोटर का स्टेटर एक संधारित्र प्रेरण मोटर के स्टेटर से अलग नहीं है। इलेक्ट्रिक मोटर के रोटर को एसिंक्रोनस इलेक्ट्रिक मोटर के रोटर से ध्रुवों की संख्या (चित्र 3-20) के अनुसार खांचे में मिलाकर बनाया जा सकता है। इस मामले में, गिलहरी पिंजरे की छड़ें आंशिक रूप से काट दी जाती हैं। ऐसे इलेक्ट्रिक मोटरों के कारखाने के उत्पादन में रोटर शीट्स के साथ पोल के किनारों के साथ मुहर लगी, गिलहरी पिंजरे की छड़ का हिस्सा एक प्रारंभिक घुमाव की भूमिका निभाता है। रोटर उसी तरह घूमना शुरू करता है जैसे एक अतुल्यकालिक इलेक्ट्रिक मोटर का रोटर, फिर इसे चुंबकीय क्षेत्र के साथ सिंक्रोनिज़्म में खींचा जाता है और फिर एक तुल्यकालिक आवृत्ति पर घूमता है।
काम की गुणवत्ता संधारित्र मोटरदृढ़ता से उस मोड पर निर्भर करता है जिसमें इलेक्ट्रिक मोटर में गोलाकार घूर्णन क्षेत्र होता है। सिंक्रोनस मोड में क्षेत्र की अण्डाकारता से शोर, कंपन में वृद्धि और रोटेशन की एकरूपता का उल्लंघन होता है। यदि एसिंक्रोनस मोड में एक गोलाकार घूर्णन क्षेत्र होता है, तो मोटर में एक अच्छा प्रारंभिक टोक़ होता है, लेकिन छोटे प्रवेश और निकास टोक़ होते हैं। जब वृत्ताकार क्षेत्र को उच्च आवृत्तियों की ओर स्थानांतरित किया जाता है, तो प्रारंभिक टोक़ कम हो जाता है, और तुल्यकालन से प्रवेश और निकास के क्षण बढ़ जाते हैं। तुल्यकालन से प्रवेश और निकास का सबसे बड़ा क्षण तब प्राप्त होता है जब वृत्ताकार घूर्णन क्षेत्र समकालिक मोड में होता है। इस मामले में, हालांकि, शुरुआती टोक़ बहुत कम हो जाता है। इसे बढ़ाने के लिए, शॉर्ट-सर्किट रोटर वाइंडिंग का सक्रिय प्रतिरोध आमतौर पर कुछ हद तक बढ़ जाता है।
कुछ प्रकार के कैपेसिटर अनिच्छा मोटर्स का नुकसान रोटर का चिपकना है, जिसका अर्थ है कि शुरू करते समय, रोटर घूमता नहीं है, लेकिन किसी भी स्थिति में रुक जाता है।
रोटर स्टिकिंग आमतौर पर मोटर्स में गुहाओं के आयामों और पोल प्रोट्रूशियंस के बीच एक दुर्भाग्यपूर्ण अनुपात के साथ होता है। इलेक्ट्रिक मोटर द्वारा खपत की गई एक छोटी शक्ति पर सबसे बड़ा प्रतिक्रियाशील टोक़ तब प्राप्त होता है जब ध्रुव चाप b p का ध्रुव विभाजन t का अनुपात लगभग 0.5-0.6 होता है, और गुहाओं की गहराई h हवा से 9-10 गुना अधिक होती है। पोल प्रोट्रूशियंस और स्टेटर के बीच की खाई।
संधारित्र अनिच्छा मोटर्स की एक सकारात्मक विशेषता एक उच्च शक्ति कारक है, जो तीन-चरण मोटर्स की तुलना में बहुत अधिक है, और कभी-कभी 0.9-0.95 तक पहुंच जाती है। ऐसा इसलिए है क्योंकि संधारित्र मोटर का अधिष्ठापन संधारित्र के समाई से काफी हद तक ऑफसेट होता है।
सिंक्रोनस अनिच्छा मोटर्स सबसे आम हैं तुल्यकालिक मोटर्सडिजाइन की सादगी, कम लागत और स्लाइडिंग संपर्कों की अनुपस्थिति के कारण। उन्होंने सिंक्रोनस संचार सर्किट, ध्वनि फिल्म, ध्वनि रिकॉर्डिंग और टेलीविजन प्रतिष्ठानों में आवेदन पाया है।
3-9. सिंगल-फेज के रूप में तीन-चरण अतुल्यकालिक इलेक्ट्रिक मोटर्स का उपयोग
व्यवहार में, ऐसे मामले होते हैं जब आपको तीन-चरण इलेक्ट्रिक मोटर को कनेक्ट करने की आवश्यकता होती है एकल चरण नेटवर्क. पहले, यह माना जाता था कि इसके लिए इलेक्ट्रिक मोटर के स्टेटर को रिवाइंड करने की आवश्यकता होती है। वर्तमान में, स्टेटर वाइंडिंग में बिना किसी बदलाव के तीन-चरण इलेक्ट्रिक मोटर्स को एकल-चरण नेटवर्क से जोड़ने के लिए कई योजनाएं विकसित और व्यवहार में परीक्षण की गई हैं।
कैपेसिटर का उपयोग शुरुआती तत्वों के रूप में किया जाता है।
तीन-चरण इलेक्ट्रिक मोटर के स्टेटर वाइंडिंग के निष्कर्ष में निम्नलिखित पदनाम हैं: C1 - पहले चरण की शुरुआत; C2- दूसरे चरण की शुरुआत; NW- तीसरे चरण की शुरुआत; C4 - पहले चरण का अंत; C5 - दूसरे चरण का अंत; C6- तीसरे चरण का अंत। ये पदनाम वाइंडिंग के प्रमुख तारों पर पहने जाने वाले धातु के टैग पर उकेरे जाते हैं।
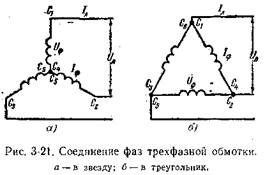
तीन-चरण इलेक्ट्रिक मोटर की वाइंडिंग को एक स्टार (छवि 3-21, ए) या एक त्रिकोण (छवि 3-21, बी) में जोड़ा जा सकता है। जब एक तारे से जुड़ा होता है, तो तीनों चरणों की शुरुआत या अंत एक बिंदु से जुड़ा होता है, और शेष तीन आउटपुट तीन-चरण नेटवर्क से जुड़े होते हैं। त्रिभुज से जुड़ते समय, पहले चरण का अंत दूसरे की शुरुआत से जुड़ा होता है, दूसरे का अंत तीसरे की शुरुआत से और तीसरे का अंत पहले की शुरुआत से होता है। इलेक्ट्रिक मोटर को से जोड़ने के लिए कनेक्शन बिंदुओं से लीड ली जाती है तीन चरण नेटवर्क.
तीन-चरण प्रणाली में, चरण और रैखिक वोल्टेज और धाराओं को प्रतिष्ठित किया जाता है। किसी तारे से जुड़ने पर उनके बीच निम्नलिखित संबंध बनते हैं:
जब एक त्रिभुज में जुड़ा होता है
अधिकांश तीन-चरण इलेक्ट्रिक मोटर दो रैखिक वोल्टेज के लिए उत्पादित होते हैं, उदाहरण के लिए 127/220 वी या 220/380 वी। कम मुख्य वोल्टेज पर, घुमावदार एक त्रिकोण में और उच्च वोल्टेज पर, एक स्टार में जुड़ा होता है . ऐसी इलेक्ट्रिक मोटरों के लिए, घुमावदार के सभी छह टर्मिनल कंडक्टर बोर्ड को आउटपुट होते हैं: क्लैंप।
हालांकि, एक मेन वोल्टेज के लिए इलेक्ट्रिक मोटर होते हैं, जिसमें वाइंडिंग को एक तारे में या इलेक्ट्रिक मोटर के अंदर एक त्रिकोण में जोड़ा जाता है, और केवल तीन कंडक्टरों को टर्मिनल बोर्ड में लाया जाता है। बेशक, इस मामले में इलेक्ट्रिक मोटर को अलग करना, चरण-दर-चरण कनेक्शन को डिस्कनेक्ट करना और तीन अतिरिक्त निष्कर्ष निकालना संभव होगा। हालाँकि, आप इलेक्ट्रिक मोटर को सिंगल-फेज नेटवर्क से जोड़ने की किसी एक योजना का उपयोग करके ऐसा नहीं कर सकते, जो नीचे दी गई है।
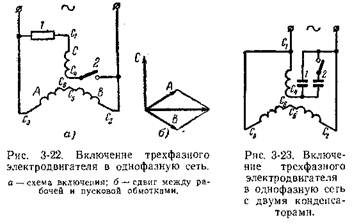
एकल-चरण नेटवर्क में छह आउटपुट के साथ तीन-चरण इलेक्ट्रिक मोटर को शामिल करने का एक योजनाबद्ध आरेख अंजीर में दिखाया गया है। 3-22, ए. ऐसा करने के लिए, दो चरण श्रृंखला में जुड़े हुए हैं और एकल-चरण नेटवर्क से जुड़े हैं, और तीसरा चरण समानांतर में उनसे जुड़ा है, जिसमें स्विच 2 के साथ एक प्रारंभिक तत्व 1 शामिल है। एक सक्रिय प्रतिरोध या एक संधारित्र एक के रूप में काम कर सकता है प्रारंभिक तत्व। इस मामले में, वर्किंग वाइंडिंग स्टेटर स्लॉट्स के 2/3 और शुरुआती वाइंडिंग 1/3 पर कब्जा कर लेगी। इस प्रकार, तीन-चरण वाइंडिंग काम करने और शुरू करने वाली वाइंडिंग के बीच आवश्यक स्लॉट अनुपात प्रदान करती है। इस संबंध में, काम करने और शुरू करने वाले वाइंडिंग के बीच का कोण 90 ° el है। (चित्र। 3-22, बी)।
श्रृंखला में दो चरणों को जोड़ते समय, यह सुनिश्चित करना आवश्यक है कि वे n के अनुसार जुड़े हुए हैं, न कि काउंटर के अनुसार। साथ। जुड़े चरणों को घटाया जाता है। जैसा कि अंजीर में आरेख से देखा जा सकता है। 3-22, ए, दूसरे और तीसरे चरण सी 5 और सी 6 के छोर एक सामान्य बिंदु से जुड़े हुए हैं।
अंजीर की योजना के अनुसार संधारित्र के रूप में तीन-चरण इलेक्ट्रिक मोटर का उपयोग करना संभव है। 3-23 एक कार्यशील संधारित्र 1 के साथ या कार्यशील 1 के साथ और 2 संधारित्र प्रारंभ करने के साथ। ऐसी स्विचिंग योजना के साथ, कार्यशील संधारित्र की धारिता, μF, सूत्र द्वारा निर्धारित की जाती है:
जहां मैं - वर्तमान मूल्यांकितइलेक्ट्रिक मोटर, ए; यू मुख्य वोल्टेज है, वी।
तीन टर्मिनलों वाली एक तीन-चरण इलेक्ट्रिक मोटर और एक स्टार से जुड़ी एक स्टेटर वाइंडिंग अंजीर में आरेख के अनुसार एकल-चरण नेटवर्क से जुड़ी होती है। 3-24. इस मामले में, कार्यशील संधारित्र की समाई सूत्र द्वारा निर्धारित की जाती है
संधारित्र वोल्टेज यू 1 = 1.3 यू।
तीन टर्मिनलों वाली एक तीन-चरण इलेक्ट्रिक मोटर और एक डेल्टा में जुड़ी एक स्टेटर वाइंडिंग अंजीर में आरेख के अनुसार एकल-चरण नेटवर्क से जुड़ी होती है। 3-25. कार्यशील संधारित्र की क्षमता सूत्र द्वारा निर्धारित की जाती है
संधारित्र वोल्टेज यू = 1.15 वी।
तीनों मामलों में क्षमता कैपेसिटर शुरू करनासंबंध से लगभग निर्धारित किया जा सकता है
![]()
स्विचिंग सर्किट चुनते समय, किसी को उस वोल्टेज द्वारा निर्देशित किया जाना चाहिए जिसके लिए तीन-चरण इलेक्ट्रिक मोटर डिज़ाइन किया गया है, और एकल-चरण नेटवर्क का वोल्टेज। इस मामले में, तीन चरण का चरण वोल्टेज

उदाहरण। 250 डब्ल्यू की शक्ति के साथ एक तीन-चरण इलेक्ट्रिक मोटर, 2/1.15 ए के रेटेड वर्तमान के साथ 127/220 वी का वोल्टेज 220 वी के वोल्टेज के साथ एकल चरण नेटवर्क से जुड़ा होना चाहिए।
अंजीर की योजना का उपयोग करते समय। कार्यशील संधारित्र की 3-24 क्षमता:
![]()
कैपेसिटर यू 1 \u003d 1.3 220 \u003d 286 वी पर वोल्टेज।
संधारित्र प्रारंभ करें
एकल-चरण मोटर के रूप में तीन-चरण इलेक्ट्रिक मोटर का उपयोग करते समय, इसकी शक्ति 50% तक कम हो जाती है, एकल-चरण संधारित्र के रूप में - तीन-चरण इलेक्ट्रिक मोटर की रेटेड शक्ति का 70% तक।
एन.वी. विनोग्रादोव, यू.एन. Vinogradov
इलेक्ट्रिक मोटर की गणना और खुद कैसे करें
मास्को 1974
एसी वोल्टेज को परिवर्तित करने में आसानी ने इसे बिजली आपूर्ति में सबसे व्यापक रूप से उपयोग किया है। विद्युत मोटरों को डिजाइन करने के क्षेत्र में, प्रत्यावर्ती धारा का एक और लाभ खोजा गया: अतिरिक्त परिवर्तनों के बिना या उनमें से न्यूनतम के साथ एक घूर्णन चुंबकीय क्षेत्र बनाने की क्षमता।
इसलिए, वाइंडिंग के प्रतिक्रियाशील (आगमनात्मक) प्रतिरोध के कारण कुछ नुकसानों के बावजूद, एसी मोटर्स बनाने में आसानी ने 20 वीं शताब्दी की शुरुआत में डीसी बिजली की आपूर्ति पर जीत में योगदान दिया।
मूल रूप से, एसी मोटर्स को दो समूहों में विभाजित किया जा सकता है:
अतुल्यकालिक
उनमें, रोटर का घूर्णन चुंबकीय क्षेत्र के घूर्णन से गति में भिन्न होता है, इसलिए वे विभिन्न प्रकार की गति से काम कर सकते हैं। इस प्रकार की एसी मोटर हमारे समय में सबसे आम है। एक समय का
इन मोटरों का रोटर गति और चुंबकीय क्षेत्र घूर्णन गति के बीच एक कठोर संबंध होता है। वे निर्माण में अधिक कठिन होते हैं और उपयोग में कम लचीले होते हैं (आपूर्ति नेटवर्क की एक निश्चित आवृत्ति पर गति को बदलना केवल स्टेटर पोल की संख्या को बदलकर संभव है)।
उनका उपयोग केवल कई सौ किलोवाट की उच्च शक्तियों पर किया जाता है, जहां अतुल्यकालिक इलेक्ट्रिक मोटर्स की तुलना में उनकी उच्च दक्षता गर्मी के नुकसान को काफी कम करती है।
एसी अतुल्यकालिक विद्युत मोटर
एसिंक्रोनस मोटर का सबसे सामान्य प्रकार एक इलेक्ट्रिक मोटर है गिलहरी-पिंजरे रोटर"गिलहरी पिंजरे" प्रकार का, जहां रोटर के झुके हुए खांचे में प्रवाहकीय छड़ का एक सेट रखा जाता है, जो सिरों पर छल्ले से जुड़ा होता है।
इस प्रकार की इलेक्ट्रिक मोटरों का इतिहास सौ साल से भी अधिक पुराना है, जब यह देखा गया कि एक प्रत्यावर्ती धारा इलेक्ट्रोमैग्नेट के कोर के अंतराल में रखी गई एक प्रवाहकीय वस्तु एक प्रेरण ईएमएफ की उपस्थिति के कारण इससे बच जाती है। यह एक विपरीत वेक्टर के साथ है।
इस प्रकार, एक गिलहरी-पिंजरे रोटर के साथ एक इंडक्शन मोटर में रोटर सपोर्ट बेयरिंग को छोड़कर कोई यांत्रिक संपर्क नोड नहीं होता है, जो न केवल कम कीमत के साथ, बल्कि उच्चतम स्थायित्व के साथ इस प्रकार के मोटर्स प्रदान करता है। इसके लिए धन्यवाद, इस प्रकार के इलेक्ट्रिक मोटर्स आधुनिक उद्योग में सबसे आम हो गए हैं।
हालाँकि, उनके कुछ नुकसान भी हैं जिन्हें इस प्रकार के अतुल्यकालिक इलेक्ट्रिक मोटर्स को डिजाइन करते समय ध्यान में रखा जाना चाहिए:
उच्च प्रारंभिक धारा- चूंकि इस समय एसिंक्रोनस ब्रशलेस इलेक्ट्रिक मोटर नेटवर्क से जुड़ा है, रोटर द्वारा बनाए गए चुंबकीय क्षेत्र से स्टेटर वाइंडिंग का प्रतिक्रियाशील प्रतिरोध अभी तक प्रभावित नहीं हुआ है, एक मजबूत वर्तमान उछाल होता है, रेटेड वर्तमान खपत से कई गुना अधिक होता है .
इस प्रकार के इंजनों के संचालन की इस विशेषता को ओवरलोड से बचने के लिए सभी डिज़ाइन की गई बिजली आपूर्ति में शामिल किया जाना चाहिए, खासकर जब एसिंक्रोनस इलेक्ट्रिक मोटर्स को सीमित शक्ति के साथ मोबाइल जनरेटर से जोड़ना।
कम प्रारंभिक टोक़- शॉर्ट-सर्किट वाइंडिंग वाले इलेक्ट्रिक मोटर्स में गति पर टॉर्क की स्पष्ट निर्भरता होती है, इसलिए लोड के तहत उनका समावेश अत्यधिक अवांछनीय है: नाममात्र मोड तक पहुंचने और धाराओं को शुरू करने का समय काफी बढ़ जाता है, स्टेटर वाइंडिंग अतिभारित होती है।
उदाहरण के लिए, जब आप चालू करते हैं तो क्या होता है गहरे पंप- उनकी बिजली आपूर्ति के विद्युत सर्किट में, पांच-सात गुना वर्तमान मार्जिन को ध्यान में रखना आवश्यक है।
सिंगल-फेज करंट सर्किट में डायरेक्ट स्टार्ट की असंभवता- रोटर को घूमना शुरू करने के लिए, एक प्रारंभिक धक्का या अतिरिक्त चरण वाइंडिंग की शुरूआत आवश्यक है जो एक दूसरे के सापेक्ष चरण-स्थानांतरित हैं।
एकल-चरण नेटवर्क में एक अतुल्यकालिक एसी मोटर शुरू करने के लिए, या तो मैन्युअल रूप से स्विच की गई शुरुआती वाइंडिंग का उपयोग किया जाता है, जो रोटर के घूमने के बाद बंद हो जाती है, या एक चरण-स्थानांतरण तत्व के माध्यम से जुड़ी दूसरी वाइंडिंग (अक्सर, एक संधारित्र) आवश्यक क्षमता)।
उच्च गति प्राप्त करने में असमर्थता- हालांकि रोटर के रोटेशन को स्टेटर चुंबकीय क्षेत्र के रोटेशन की आवृत्ति के साथ सिंक्रनाइज़ नहीं किया जाता है, यह इसका नेतृत्व नहीं कर सकता है, इसलिए, 50 हर्ट्ज नेटवर्क में, गिलहरी-पिंजरे रोटर के साथ एक अतुल्यकालिक इलेक्ट्रिक मोटर के लिए अधिकतम गति नहीं है 3000 आरपीएम से अधिक।
एक प्रेरण मोटर की गति बढ़ाने के लिए एक आवृत्ति कनवर्टर (इन्वर्टर) के उपयोग की आवश्यकता होती है, जो इस तरह की प्रणाली को कलेक्टर मोटर की तुलना में अधिक महंगा बनाता है। इसके अलावा, जैसे-जैसे आवृत्ति बढ़ती है, प्रतिक्रियाशील हानियां बढ़ती हैं।
रिवर्स को व्यवस्थित करने में कठिनाई- इसके लिए इंजन और फेज री-स्विचिंग को पूरी तरह से बंद करने की जरूरत है, सिंगल-फेज वर्जन में - शुरुआती या दूसरे फेज वाइंडिंग में फेज शिफ्ट।
औद्योगिक तीन-चरण नेटवर्क में एक अतुल्यकालिक इलेक्ट्रिक मोटर का उपयोग करना सबसे सुविधाजनक है, क्योंकि एक घूर्णन चुंबकीय क्षेत्र का निर्माण अतिरिक्त उपकरणों के बिना स्वयं चरण वाइंडिंग द्वारा किया जाता है।
वास्तव में, तीन-चरण जनरेटर और एक इलेक्ट्रिक मोटर से युक्त एक सर्किट को विद्युत संचरण के उदाहरण के रूप में माना जा सकता है: जनरेटर ड्राइव इसमें एक घूर्णन चुंबकीय क्षेत्र बनाता है, जो दोलनों में परिवर्तित हो जाता है। विद्युत प्रवाह, जो बदले में विद्युत मोटर में चुंबकीय क्षेत्र के घूर्णन को उत्तेजित करता है।
इसके अलावा, यह तीन-चरण बिजली की आपूर्ति के साथ है अतुल्यकालिक इलेक्ट्रिक मोटर्सउच्चतम दक्षता है, क्योंकि एकल-चरण नेटवर्क में स्टेटर द्वारा बनाए गए चुंबकीय क्षेत्र को अनिवार्य रूप से दो विरोधी चरण वाले में विघटित किया जा सकता है, जो कोर संतृप्ति के कारण बेकार नुकसान को बढ़ाता है। इसलिए, शक्तिशाली एकल-चरण इलेक्ट्रिक मोटर्स आमतौर पर कलेक्टर सर्किट के अनुसार किए जाते हैं।
एसी इलेक्ट्रिक मोटर कलेक्टर
इस प्रकार के इलेक्ट्रिक मोटर्स में, रोटर के चुंबकीय क्षेत्र को कलेक्टर से जुड़े फेज वाइंडिंग द्वारा बनाया जाता है। वास्तव में, एक एसी कम्यूटेटर मोटर मोटर से अलग होती है एकदिश धाराकेवल इस तथ्य से कि वाइंडिंग की प्रतिक्रिया इसकी गणना में शामिल है।
कुछ मामलों में, यूनिवर्सल कलेक्टर मोटर्स भी बनाए जाते हैं, जहां स्टेटर वाइंडिंग में एसी नेटवर्क में शामिल करने के लिए एक अधूरे हिस्से से एक नल होता है, और एक डीसी करंट स्रोत को वाइंडिंग की पूरी लंबाई से जोड़ा जा सकता है।
इस प्रकार के इंजन के फायदे स्पष्ट हैं:
उच्च गति पर काम करने की क्षमताआपको कलेक्टर इलेक्ट्रिक मोटर्स बनाने की अनुमति देता है, जिसमें प्रति मिनट कई दसियों हज़ार क्रांतियाँ होती हैं, जो इलेक्ट्रिक ड्रिल से सभी के लिए परिचित हैं।
अतिरिक्त ट्रिगर्स की कोई आवश्यकता नहीं हैगिलहरी-पिंजरे मोटर्स के विपरीत।
उच्च प्रारंभिक टोक़, जो कम लोड सहित, ऑपरेटिंग मोड में आउटपुट को गति देता है। इसके अलावा, कलेक्टर मोटर का टॉर्क गति के व्युत्क्रमानुपाती होता है और लोड में वृद्धि के साथ, यह गति में गिरावट से बचता है।
कारोबार नियंत्रण में आसानी- चूंकि वे आपूर्ति वोल्टेज पर निर्भर करते हैं, इसलिए व्यापक सीमा से अधिक गति को समायोजित करने के लिए एक साधारण ट्राइक वोल्टेज नियामक होना पर्याप्त है। यदि नियामक विफल हो जाता है, तो कलेक्टर मोटर को सीधे नेटवर्क से जोड़ा जा सकता है।
कम रोटर जड़ता- इसे गिलहरी-पिंजरे के सर्किट की तुलना में बहुत अधिक कॉम्पैक्ट बनाया जा सकता है, जिसके कारण कलेक्टर मोटर स्वयं काफ़ी छोटा हो जाता है।
इसके अलावा, कलेक्टर मोटर को बस उलटा किया जा सकता है, जो विभिन्न प्रकार के बिजली उपकरण और कई मशीन टूल्स बनाते समय विशेष रूप से महत्वपूर्ण है।
इन कारणों से, कलेक्टर मोटर्स का व्यापक रूप से सभी एकल-चरण उपभोक्ताओं में उपयोग किया जाता है जहां लचीली गति नियंत्रण आवश्यक है: हाथ से चलने वाले बिजली उपकरण, वैक्यूम क्लीनर में, रसोई उपकरणऔर इसी तरह। हालांकि, एक संख्या डिज़ाइन विशेषताएँकलेक्टर इलेक्ट्रिक मोटर के संचालन की बारीकियों को निर्धारित करता है:
कलेक्टर मोटर्स को ब्रश के नियमित प्रतिस्थापन की आवश्यकता होती है जो समय के साथ खराब हो जाते हैं। कलेक्टर स्वयं खराब हो जाता है, जबकि गिलहरी-पिंजरे रोटर वाला इंजन, जैसा कि पहले ही ऊपर उल्लेख किया गया है, बीयरिंगों के दुर्लभ प्रतिस्थापन के अधीन, लगभग शाश्वत है।
कलेक्टर और ब्रश के बीच अपरिहार्य स्पार्किंग (कलेक्टर मोटर के चलने पर ओजोन की परिचित गंध का कारण) न केवल संसाधन को और कम करता है, बल्कि दहनशील गैसों के प्रज्वलन की संभावना के कारण ऑपरेशन के दौरान सुरक्षा उपायों में वृद्धि की आवश्यकता होती है या धूल।
© 2012-2017 सर्वाधिकार सुरक्षित।
इस साइट पर प्रस्तुत सभी सामग्री केवल सूचना के उद्देश्यों के लिए हैं और दिशानिर्देशों और नियामक दस्तावेजों के रूप में उपयोग नहीं की जा सकती हैं।
उपयोग के क्षेत्र।निम्न शक्ति (15 - 600 W) के अतुल्यकालिक मोटर्स का उपयोग किया जाता है स्वचालित उपकरणऔर पंखे, पंप और अन्य उपकरण चलाने के लिए बिजली के उपकरण जिन्हें गति नियंत्रण की आवश्यकता नहीं होती है। घरेलू उपकरण और स्वचालित उपकरण आमतौर पर एकल-चरण माइक्रोमोटर्स का उपयोग करते हैं, क्योंकि ये उपकरण और उपकरण, एक नियम के रूप में, एकल-चरण वैकल्पिक वर्तमान नेटवर्क द्वारा संचालित होते हैं।
संचालन का सिद्धांत और एकल-चरण मोटर का उपकरण।सिंगल-फेज मोटर की स्टेटर वाइंडिंग (चित्र। 4.60, एक)स्टेटर परिधि के लगभग दो तिहाई हिस्से पर स्थित स्लॉट्स में स्थित है, जो डंडे की एक जोड़ी से मेल खाती है। नतीजतन
(अध्याय 3 देखें) एमएमएफ का वितरण और वायु अंतराल में प्रेरण साइनसॉइडल के करीब है। चूंकि घुमावदार गुजरता है प्रत्यावर्ती धारा, एमडीएस नेटवर्क आवृत्ति के साथ समय पर स्पंदित होता है। वायु अंतराल में एक मनमाना बिंदु पर प्रेरण
वी एक्स = वी एम sinωtcos (πх/τ).
इस प्रकार, एकल-चरण मोटर में, स्टेटर वाइंडिंग एक स्थिर प्रवाह बनाता है जो समय के साथ बदलता रहता है, न कि एक गोलाकार घूर्णन प्रवाह, जैसा कि तीन-चरण मोटर्स में एक सममित आपूर्ति के साथ होता है।
एकल-चरण मोटर के गुणों के विश्लेषण को सरल बनाने के लिए, हम (4.99) के रूप में प्रतिनिधित्व करते हैं
वी एक्स \u003d 0.5 वी टी पाप (ωt - πx / τ) + 0.5V टी पाप (ωt + x / τ),.
यानी, हम स्थिर स्पंदनशील प्रवाह को विपरीत दिशाओं में घूमने वाले समान वृत्ताकार क्षेत्रों के योग से बदलते हैं और समान घूर्णी आवृत्तियों वाले होते हैं: एन 1 इंच = एन 1रेव = एनएक । चूंकि एक गोलाकार घूर्णन क्षेत्र के साथ एक प्रेरण मोटर के गुणों पर 4.7 - 4.12 में विस्तार से चर्चा की गई है, एकल-चरण मोटर के गुणों के विश्लेषण को प्रत्येक घूर्णन क्षेत्र की संयुक्त क्रिया पर विचार करने के लिए कम किया जा सकता है। दूसरे शब्दों में, एक एकल-चरण मोटर को दो समान मोटरों के रूप में दर्शाया जा सकता है, जिनमें से रोटर कठोर रूप से परस्पर जुड़े होते हैं (चित्र 4.60, बी), चुंबकीय क्षेत्रों के रोटेशन की विपरीत दिशा और उनके द्वारा बनाए गए क्षणों के साथ। एमपर एमगिरफ्तार वह क्षेत्र, जिसके घूर्णन की दिशा रोटर के घूर्णन की दिशा से मेल खाती है, प्रत्यक्ष कहलाती है; विपरीत दिशा क्षेत्र - उलटा या उलटा।
आइए मान लें कि रोटरों के घूर्णन की दिशा घूर्णन क्षेत्रों में से एक की दिशा के साथ मेल खाती है, उदाहरण के लिए, n आदि के साथ। फिर प्रवाह के सापेक्ष रोटर की स्लाइडिंग एफआदि
s pr \u003d (n 1pr - n 2) / n 1pr \u003d (n 1 - n 2) / n 1 \u003d 1 - n 2 / n 1..
प्रवाह के सापेक्ष रोटर की पर्ची arr
s arr \u003d (n 1 arr + n 2) / n 1 arr \u003d (n 1 + n 2) / n 1 \u003d 1 + n 2 / n 1..
(4.100) और (4.101) से यह इस प्रकार है
एस o6p \u003d 1 + पी 2 / एन 1 \u003d 2 - एस पीआर।.
विद्युत चुम्बकीय क्षण एमपर एमएआर, प्रत्यक्ष और विपरीत क्षेत्रों द्वारा गठित, को निर्देशित किया जाता है विपरीत दिशाए, और एकल-चरण मोटर का परिणामी क्षण एमकट समान रोटर गति पर क्षणों में अंतर के बराबर है।
अंजीर पर। 4.61 निर्भरता दर्शाता है एम = एफ (एस)सिंगल फेज मोटर के लिए आकृति को देखते हुए, हम निम्नलिखित निष्कर्ष निकाल सकते हैं:
a) सिंगल-फेज मोटर में स्टार्टिंग टॉर्क नहीं होता है; यह उस दिशा में घूमता है जिसमें यह बाहरी बल द्वारा संचालित होता है; b) निष्क्रिय अवस्था में एकल-चरण मोटर की घूर्णी गति से कम होती है तीन चरण मोटर, रिवर्स फील्ड द्वारा उत्पन्न ब्रेकिंग टॉर्क की उपस्थिति के कारण;
ग) एकल-चरण मोटर का प्रदर्शन तीन-चरण मोटर की तुलना में खराब है; इसने रेटेड लोड, कम दक्षता, कम अधिभार क्षमता पर पर्ची बढ़ा दी है, जो एक रिवर्स फील्ड की उपस्थिति के कारण भी है;
डी) एकल-चरण मोटर की शक्ति समान आकार के तीन-चरण मोटर की शक्ति का लगभग 2/3 है, क्योंकि एकल-चरण मोटर में काम करने वाली वाइंडिंग स्टेटर स्लॉट्स के केवल 2/3 हिस्से पर होती है। सभी स्टेटर स्लॉट भरें
चूंकि इस मामले में घुमावदार गुणांक छोटा हो जाता है, तांबे की खपत लगभग . बढ़ जाती है 1.5 गुना, जबकि बिजली में केवल 12% की वृद्धि होती है।
डिवाइस शुरू करना।प्रारंभिक टोक़ प्राप्त करने के लिए, सिंगल फेज मोटर्समुख्य कार्यशील वाइंडिंग के सापेक्ष 90 विद्युत डिग्री द्वारा स्थानांतरित एक प्रारंभिक घुमावदार है। स्टार्ट-अप अवधि के लिए, प्रारंभिक घुमावदार चरण-स्थानांतरण तत्वों - समाई या सक्रिय प्रतिरोध के माध्यम से नेटवर्क से जुड़ा हुआ है। इंजन के त्वरण की समाप्ति के बाद, शुरुआती वाइंडिंग को बंद कर दिया जाता है, जबकि इंजन एकल-चरण के रूप में काम करना जारी रखता है। चूंकि शुरुआती वाइंडिंग केवल थोड़े समय के लिए काम करती है, इसे काम करने वाले की तुलना में छोटे क्रॉस सेक्शन के तार से बनाया जाता है, और कम संख्या में खांचे में रखा जाता है।
आइए चरण-स्थानांतरण तत्व के रूप में कैपेसिटेंस सी का उपयोग करते समय स्टार्ट-अप प्रक्रिया पर नज़र डालें (चित्र। 4.62, ए)। स्टार्टिंग वाइंडिंग पर पीवोल्टेज
Ú
1p = Ú
1 - Ú
सी = Ú
1 +जी 1पी एक्स सी, यानी यह मुख्य वोल्टेज के सापेक्ष चरण स्थानांतरित हो गया है यू 1 वर्किंग वाइंडिंग पर लागू होता है आर. नतीजतन, काम कर रहे वर्तमान वैक्टर मैं 1p और लांचर मैं 1n वाइंडिंग को किसी कोण से चरण में स्थानांतरित किया जाता है। एक निश्चित तरीके से चरण-स्थानांतरण संधारित्र के समाई को चुनकर, स्टार्ट-अप पर एक ऑपरेटिंग मोड प्राप्त करना संभव है जो सममित (छवि 4.62, बी) के करीब है, यानी, एक गोलाकार घूर्णन क्षेत्र प्राप्त करने के लिए। अंजीर पर। 4.62, निर्भरताएँ दिखाई जाती हैं एम = एफ (एस)चालू (वक्र 1) और बंद (वक्र 2) वाली मोटर के लिए। इंजन भागों में शुरू किया गया है अबविशेषताएं 1; बिंदु पर बीशुरुआती वाइंडिंग बंद कर दी जाती है, और भविष्य में इंजन आंशिक रूप से चलता है सीओविशेषताएं 2.
चूंकि दूसरी वाइंडिंग को शामिल करने से मोटर की यांत्रिक विशेषताओं में काफी सुधार होता है, कुछ मामलों में सिंगल-फेज मोटर्स का उपयोग किया जाता है जिसमें वाइंडिंग ए और बी
हर समय शामिल है (चित्र। 4.63, ए)। ऐसी मोटरों को कैपेसिटर मोटर्स कहा जाता है।
कैपेसिटर मोटर्स की दोनों वाइंडिंग, एक नियम के रूप में, समान संख्या में स्लॉट्स पर कब्जा करती हैं और समान शक्ति होती हैं। एक संधारित्र मोटर शुरू करते समय, शुरुआती टोक़ को बढ़ाने के लिए, एक बढ़ी हुई समाई सी पी + सी पी की सलाह दी जाती है। विशेषता 2 (छवि। 4.63, बी) के अनुसार मोटर को तेज करने के बाद और वर्तमान घट जाती है, भाग कैपेसिटर Cn को बंद कर दिया जाता है ताकि रेटेड मोड में (जब मोटर करंट स्टार्ट-अप की तुलना में छोटा हो जाए) कैपेसिटेंस बढ़ाने के लिए और सर्कुलर रोटेटिंग फील्ड के साथ ऑपरेशन के करीब स्थितियों में मोटर के संचालन को सुनिश्चित करें। इस मामले में, इंजन विशेषता 1 पर काम करता है।
संधारित्र मोटर में एक उच्च cos होता है। इसके नुकसान संधारित्र के अपेक्षाकृत बड़े द्रव्यमान और आयाम हैं, साथ ही आपूर्ति वोल्टेज के विरूपण के दौरान एक गैर-साइनसॉइडल वर्तमान की घटना है, जो कुछ मामलों में होता है हानिकारक प्रभावसंचार लाइन पर।
हल्की शुरुआती स्थितियों (शुरुआती अवधि के दौरान छोटे लोड टॉर्क) के तहत, शुरुआती प्रतिरोध वाले मोटर्स का उपयोग किया जाता है। आर(चित्र। 4.64, ए)। उपलब्धता सक्रिय प्रतिरोधस्टार्टिंग वाइंडिंग के सर्किट में इस वाइंडिंग में वोल्टेज और करंट के बीच एक छोटा फेज शिफ्ट p प्रदान करता है (चित्र 4.64, b) फेज शिफ्ट p की तुलना में वर्किंग वाइंडिंग में। इस संबंध में, काम कर रहे धाराओं और वाइंडिंग शुरू करनाएक कोण φ p - p द्वारा चरण में स्थानांतरित किया जाता है और एक असममित (अण्डाकार) घूर्णन क्षेत्र बनाता है, जिसके कारण प्रारंभिक टोक़ होता है। शुरुआती प्रतिरोध वाले मोटर्स संचालन में विश्वसनीय हैं और बड़े पैमाने पर उत्पादित होते हैं। प्रारंभिक प्रतिरोध मोटर आवास में बनाया गया है और उसी हवा से ठंडा किया जाता है जो पूरे मोटर को ठंडा करता है।
परिरक्षित डंडे के साथ सिंगल-फेज माइक्रोमोटर्स।इन मोटर्स में, नेटवर्क से जुड़े स्टेटर वाइंडिंग को आमतौर पर स्पष्ट ध्रुवों (चित्र। 4.65, ए) पर केंद्रित और मजबूत किया जाता है, जिनमें से शीट्स को स्टेटर के साथ एक साथ मुहर लगाई जाती है। प्रत्येक पोल में, लग्स में से एक को एक सहायक वाइंडिंग द्वारा कवर किया जाता है, जिसमें एक या एक से अधिक शॉर्ट-सर्किट मोड़ होते हैं, जो पोल आर्क के 1/5 से 1/2 तक ढालते हैं। मोटर रोटर एक गिलहरी-पिंजरे पारंपरिक प्रकार है।
स्टेटर वाइंडिंग (पोल फ्लक्स) द्वारा बनाई गई मशीन के चुंबकीय प्रवाह को दो घटकों (चित्र। 4.65, बी) ty कॉइल के योग के रूप में दर्शाया जा सकता है; n2 - एक शॉर्ट-सर्कुलेटेड कॉइल द्वारा परिरक्षित पोल के हिस्से से गुजरने वाला प्रवाह।
प्रवाह p1 और p2 ध्रुव के टुकड़े के विभिन्न भागों से होकर गुजरते हैं, अर्थात वे अंतरिक्ष में कोण β द्वारा विस्थापित होते हैं। इसके अलावा, वे एमडीएस के संबंध में चरण से बाहर हैं एफ n विभिन्न कोणों पर स्टेटर वाइंडिंग - 1 और 2। यह इस तथ्य से समझाया गया है कि वर्णित मोटर के प्रत्येक ध्रुव को ट्रांसफार्मर के रूप में पहला सन्निकटन माना जा सकता है, जिसकी प्राथमिक वाइंडिंग स्टेटर वाइंडिंग है, और सेकेंडरी वाइंडिंग एक शॉर्ट-सर्किट कॉइल है। स्टेटर वाइंडिंग फ्लक्स शॉर्ट-सर्कुलेटेड कॉइल में EMF को प्रेरित करता है इसे (चित्र 4.65, सी), जिसके परिणामस्वरूप एक धारा उत्पन्न होती है मैंकरने के लिए और एमडीएस एफकश्मीर, एमडीएस के साथ तह एफएन स्टेटर वाइंडिंग। प्रतिक्रियाशील वर्तमान घटक मैंप्रवाह को कम करने के लिए p2, और सक्रिय - इसे एमडीएस के सापेक्ष चरण में स्थानांतरित करता है एफ n. चूंकि फ्लक्स Ф p1 शॉर्ट-सर्कुलेटेड कॉइल को कवर नहीं करता है, कोण γ 1 का अपेक्षाकृत छोटा मान (4-9 °) होता है - लगभग ट्रांसफॉर्मर फ्लक्स और प्राइमरी के MMF के बीच फेज शिफ्ट एंगल के समान मोड में घुमावदार निष्क्रिय चाल. कोण γ 2 बहुत बड़ा (लगभग 45 °) है, अर्थात, एक शॉर्ट-सर्कुलेटेड सेकेंडरी वाइंडिंग वाले ट्रांसफॉर्मर के समान (उदाहरण के लिए, करंट मापने वाले ट्रांसफॉर्मर में)। यह इस तथ्य से समझाया गया है कि बिजली के नुकसान, जिस पर कोण γ 2 निर्भर करता है, न केवल स्टील में चुंबकीय शक्ति के नुकसान से निर्धारित होता है, बल्कि शॉर्ट-सर्किट कॉइल में बिजली के नुकसान से भी निर्धारित होता है।
चावल। 4.65. परिरक्षित ध्रुवों के साथ एकल-चरण मोटर के संरचनात्मक आरेख और इसके
वेक्टर आरेख:
1
- स्टेटर; 2 -
स्टेटर वाइंडिंग; 3 -
शॉर्ट सर्किट
कुंडल; 4 -
रोटर; 5
- पोल
प्रवाह Ф p1 और p2, एक कोण β द्वारा अंतरिक्ष में स्थानांतरित और एक कोण = γ 2 - l द्वारा समय में चरण में स्थानांतरित किया गया, एक अंडाकार घूर्णन चुंबकीय क्षेत्र (अध्याय 3 देखें) बनाता है, जो एक टोक़ अभिनय करता है पहले पोल के टुकड़े से दिशा में मोटर का रोटर, शॉर्ट-सर्किट कॉइल द्वारा कवर नहीं किया गया, दूसरे सिरे तक ("चरण" प्रवाह मैक्सिमा के विकल्प के अनुसार)।
विचाराधीन मोटर के शुरुआती टॉर्क को बढ़ाने के लिए, इसके घूर्णन क्षेत्र को एक गोलाकार क्षेत्र में ले जाकर, विभिन्न तरीकों का उपयोग किया जाता है: आसन्न ध्रुवों के ध्रुव टुकड़ों के बीच चुंबकीय शंट स्थापित किए जाते हैं, जो मुख्य घुमाव और शॉर्ट- के बीच चुंबकीय संबंध को बढ़ाते हैं- घुमावदार कुंडल और हवा के अंतराल में चुंबकीय क्षेत्र के आकार में सुधार; टिप के नीचे हवा के अंतर को बढ़ाएं, शॉर्ट-सर्किट कॉइल द्वारा कवर नहीं किया गया; कवरेज के विभिन्न कोणों के साथ एक टिप पर दो या दो से अधिक शॉर्ट-सर्किट टर्न का उपयोग करें। ध्रुवों पर शॉर्ट-सर्किट के बिना मोटर्स भी हैं, लेकिन एक असममित चुंबकीय प्रणाली के साथ: ध्रुव के अलग-अलग हिस्सों और विभिन्न वायु अंतराल के विभिन्न विन्यास। इस तरह के मोटरों में परिरक्षित ध्रुवों वाले मोटर्स की तुलना में कम शुरुआती टोक़ होता है, लेकिन उनकी दक्षता अधिक होती है, क्योंकि शॉर्ट-सर्किट मोड़ में उन्हें कोई बिजली हानि नहीं होती है।
परिरक्षित खंभों वाली मोटरों के माने गए डिजाइन अपरिवर्तनीय हैं। ऐसे इंजनों में रिवर्स करने के लिए शॉर्ट-सर्किट टर्न के बजाय कॉइल का उपयोग किया जाता है। बी1, बी2, बी3तथा 4 पर(चित्र 4.65, में), जिनमें से प्रत्येक आधा पोल को कवर करता है। कॉइल की एक जोड़ी को शॉर्ट-सर्किट करना पहले मेंतथा 4 परया मे २तथा तीन बजे, ध्रुव के एक या दूसरे आधे हिस्से को ढालना संभव है और इस प्रकार चुंबकीय क्षेत्र और रोटर के घूमने की दिशा बदल जाती है।
परिरक्षित डंडे वाली मोटर के कई महत्वपूर्ण नुकसान हैं: अपेक्षाकृत बड़े समग्र आयाम और वजन; कम क्योंकि 0.4 ÷ 0.6; शॉर्ट-सर्किटेड कॉइल में बड़े नुकसान के कारण कम दक्षता η = 0.25 ÷ 0.4; छोटे शुरुआती टोक़, आदि। इंजन के फायदे डिजाइन की सादगी हैं और परिणामस्वरूप, संचालन में उच्च विश्वसनीयता। स्टेटर पर दांतों की अनुपस्थिति के कारण, इंजन का शोर नगण्य होता है, इसलिए इसे अक्सर संगीत और भाषण के पुनरुत्पादन के लिए उपकरणों में उपयोग किया जाता है।
220V सिंगल-फेज इलेक्ट्रिक मोटर एक अलग तंत्र है जिसका व्यापक रूप से विभिन्न उपकरणों में स्थापना के लिए उपयोग किया जाता है। इसका उपयोग घरेलू और औद्योगिक उद्देश्यों के लिए किया जा सकता है। भोजन विद्युत मोटरसे किया गया साधारण सॉकेटजहां आवश्यक रूप से कम से कम 220 वोल्ट की शक्ति हो। इस मामले में, 60 हर्ट्ज की आवृत्ति पर ध्यान देना आवश्यक है।
व्यवहार में, यह साबित हो गया है कि 220 वी एकल-चरण इलेक्ट्रिक मोटर को उन उपकरणों के साथ बेचा जाता है जो विद्युत क्षेत्र की ऊर्जा को परिवर्तित करने में मदद करता है, और कैपेसिटर की मदद से आवश्यक चार्ज भी जमा करते हैं। आधुनिक मॉडल, जो नवीन तकनीकों का उपयोग करके उत्पादित किए जाते हैं, 220V इलेक्ट्रिक मोटर अतिरिक्त रूप से डिवाइस के कार्यस्थल को रोशन करने के लिए उपकरणों से लैस हैं। यह आंतरिक और बाहरी भागों पर लागू होता है।
यह याद रखना महत्वपूर्ण है कि संधारित्र की समाई को सभी बुनियादी आवश्यकताओं के अनुपालन में संग्रहित किया जाना चाहिए। सबसे अच्छा विकल्प वह है जहाँ हवा का तापमान वही रहता हैऔर किसी भी उतार-चढ़ाव के अधीन नहीं है। कक्ष में तापमान व्यवस्थाऋणात्मक मान पर नहीं गिरना चाहिए।
इंजन के उपयोग के दौरान, विशेषज्ञ समय-समय पर संधारित्र के समाई मान को मापने की सलाह देते हैं।
इंडक्शन मोटर्स का आज व्यापक रूप से विभिन्न औद्योगिक प्रक्रियाओं के लिए उपयोग किया जाता है। विभिन्न ड्राइव के लिए, इलेक्ट्रिक मोटर के इस विशेष मॉडल का उपयोग किया जाता है। एकल चरण अतुल्यकालिक डिजाइनलकड़ी की मशीनों, पंपों, कम्प्रेसर, औद्योगिक वेंटिलेशन उपकरणों, कन्वेयर, लिफ्ट और कई अन्य उपकरणों को चलाने में मदद करें।
इलेक्ट्रिक मोटर का उपयोग छोटे पैमाने के मशीनीकरण को चलाने के लिए भी किया जाता है। इनमें फीड ग्राइंडर और कंक्रीट मिक्सर शामिल हैं। विश्वसनीय आपूर्तिकर्ताओं से ही ऐसी संरचनाएं खरीदना आवश्यक है। खरीदने से पहले, अनुरूपता के प्रमाण पत्र और निर्माता की वारंटी की जांच करना उचित है।
आपूर्तिकर्ताओं को अपने ग्राहकों को प्रदान करना चाहिए सेवादेखभालविद्युत मोटरटूटने या विफलता के मामले में। यह मुख्य घटकों में से एक है जो पंप इकाई की असेंबली के दौरान पूरा होता है।
इलेक्ट्रिक मोटर्स की मौजूदा श्रृंखला
आज औद्योगिक उद्यमएकल-चरण इलेक्ट्रिक मोटर 220V की निम्नलिखित श्रृंखला का उत्पादन करें:

सभी इंजन डिजाइन के अनुसार विभाजित, स्थापना की विधि के साथ-साथ सुरक्षा की डिग्री के अनुसार। यह आपको संरचना को नमी या यांत्रिक कणों से बचाने की अनुमति देता है।
ए सीरीज इलेक्ट्रिक मोटर्स की विशेषताएं
ए सीरीज़ के इलेक्ट्रिक सिंगल-फ़ेज़ मोटर्स एकीकृत एसिंक्रोनस डिज़ाइन हैं। वे से बंद हैं बाहरी प्रभावगिलहरी-पिंजरे रोटर के साथ।
मोटर संरचना में निम्नलिखित निष्पादन समूह हैं:

एकल-चरण इलेक्ट्रिक मोटर 220V की लागत श्रृंखला पर निर्भर करती है।
इंजन कितने प्रकार के होते हैं?

सिंगल-फेज मोटर्स को घरेलू और औद्योगिक उद्देश्यों के लिए इलेक्ट्रिक ड्राइव को पूरा करने के लिए डिज़ाइन किया गया है। ऐसी संरचनाएं राज्य मानकों के अनुसार निर्मित होती हैं।