Types de moteurs électriques monophasés. Moteurs asynchrones monophasés. Appareil et principe de fonctionnement
3-7. DISPOSITIF DE MOTEURS ELECTRIQUES MONOPHASES ASYNCHRONES
Sur la fig. 3-16 montre le dispositif d'un moteur électrique monophasé asynchrone de type AOLB avec une résistance de démarrage intégrée. Le stator du moteur électrique est assemblé à partir de tôles embouties d'acier électrique 15, pressées et coulées dans une coque en aluminium (boîtier de stator) à double paroi 13. Des canaux sont formés entre les parois pour refroidir à l'air la surface du stator. Deux couvercles 2 et 17, moulés en alliage d'aluminium, sont posés sur l'affûtage du carter du stator.
Un capuchon estampé 18 avec des trous à l'extrémité est placé sur le capot avant 17. A travers ces trous, lorsque le rotor tourne, le ventilateur 19, monté sur l'extrémité de l'arbre du rotor, prélève de l'air. Le ventilateur est moulé en alliage d'aluminium et fixé à l'arbre avec une vis.
Dans les tôles du stator, 24 rainures en forme de poire sont estampées. Parmi ceux-ci, 16 emplacements sont occupés par les fils de l'enroulement de travail et 8 emplacements sont occupés par les fils de l'enroulement de démarrage. Les extrémités de sortie des enroulements de travail et de démarrage sont amenées aux vis de contact 4 situées dans la boîte à bornes 11. Le noyau du rotor est assemblé à partir de tôles 12 en acier électrique et pressé sur la surface ondulée de la partie médiane de l'arbre 1. Un bobinage en aluminium 14 avec bagues de fermeture et pales de soufflante est coulé dans les rainures du rotor. Le but du ventilateur est de projeter de l'air chauffé vers les parois extérieures refroidies du boîtier.

Un interrupteur centrifuge de l'enroulement de démarrage est monté sur le rotor. Il se compose de deux leviers 7 avec des contrepoids 9, assis sur des axes 8, qui sont pressés dans quatre pales de ventilateur. Les leviers sont pressés avec des goupilles 6 sur le manchon en plastique 5, qui repose librement sur l'arbre. Lors de l'accélération du rotor, lorsque la fréquence de sa rotation se rapproche de la valeur nominale, les contrepoids sous l'action de la force centrifuge divergent, faisant tourner les leviers autour des axes.
Dans ce cas, le manchon 5 se déplace vers la droite, comprimant le ressort 10, et libère le contact à ressort 4, ce qui ferme le circuit d'enroulement de démarrage. Ce contact, lorsque le rotor est à l'arrêt, est fermé par l'extrémité du manchon avec un contact fixe 3.
Les contacts mobiles et fixes sont montés sur une plaque isolante au capot arrière du moteur électrique 2. Un relais thermique est fixé dessus, qui déconnecte le moteur électrique du réseau lorsqu'il surchauffe. Le support 16 avec quatre goujons est utilisé pour monter le moteur.
Le schéma d'inclusion du moteur électrique est illustré à la fig. 3-17.
La tension secteur est fournie aux bornes C 1 et C 2. À partir de ces pinces, la tension est fournie à l'enroulement de travail à travers les contacts relais thermique RT, composé d'un bobinage, d'une plaque bimétallique et de contacts. Lorsque le moteur électrique est chauffé au-delà de la valeur autorisée, la plaque se plie et ouvre les contacts. En cas de court-circuit, un courant important traversera l'enroulement du relais thermique, la plaque chauffera rapidement et ouvrira les contacts. Dans ce cas, les enroulements de travail C et de démarrage P seront mis hors tension, car les deux sont alimentés par un relais thermique. Ainsi, le relais thermique protège le moteur des surcharges et des courts-circuits.
L'enroulement de démarrage est alimenté à partir des bornes C 1 et C 2 via le cavalier C 2 -P 1, les contacts de l'interrupteur centrifuge VTS, le cavalier VTS-RT, les contacts du relais thermique RT. Lors du démarrage du moteur électrique, lorsque le rotor atteint une vitesse de 70 à 80% de la valeur nominale, les contacts de l'interrupteur centrifuge s'ouvrent et l'enroulement de démarrage est déconnecté du réseau. Lorsque le moteur électrique est allumé, lorsque la vitesse du rotor diminue, les contacts de l'interrupteur centrifuge se referment et l'enroulement de démarrage est préparé pour le prochain démarrage.
Sur la fig. 3-18 montre la conception d'un moteur asynchrone de type ABE Ces moteurs sont connectés à un réseau avec un enroulement auxiliaire connecté en permanence, dans le circuit duquel un condensateur est connecté en série (Fig. 3-9). n'ont pas de boîtier rigide et sont donc appelés à encastrer. Avec le mécanisme d'entraînement, les moteurs électriques sont fixés avec une bride ou un support.
Le corps du moteur électrique est un paquet du noyau de stator 1, assemblé à partir de tôles d'acier électrique d'une épaisseur de 0,5 mm. L'emballage est pressé et rempli d'alliage d'aluminium sous pression. Aux extrémités du stator, il y a des anneaux de pression 5 et quatre tiges en aluminium les serrant. Les bobines 6 de l'enroulement de travail et auxiliaire sont insérées dans les encoches du stator. Les flasques paliers 4 sont centrés sur les bagues de pression 5 et 7. A travers le manchon en caoutchouc 9 dans le flasque-palier, les extrémités des enroulements 8 sont sorties pour les connecter au réseau. Les flasques de roulement sont serrés avec quatre goujons.
Le rotor du moteur est assemblé à partir de tôles d'acier électrique et rempli d'aluminium 2. Avec l'enroulement du rotor, des ailes de ventilateur sont moulées pour refroidir le moteur. Le rotor tourne dans deux roulements à billes 3.
Les moteurs électriques ont des désignations de type lettres et chiffres, par exemple, le moteur électrique ABE 041-2 signifie : A - asynchrone, B - intégré, E - monophasé,
4 est le numéro de taille, 1 est le numéro de série de la longueur du noyau du stator et le nombre 2 par un tiret est le nombre de pôles.
3-8. MOTEURS ÉLECTRIQUES MONOPHASÉS SYNCHRONES
Dans certains cas, il faut des moteurs électriques dont la vitesse doit être strictement constante quelle que soit la charge. On utilise ainsi des moteurs électriques synchrones, dans lesquels la vitesse du rotor est toujours égale à la vitesse champ magnétique et est déterminé par (3-2). Il existe de nombreux types de moteurs synchrones, à courant triphasé et monophasé. Seuls deux des types les plus simples de moteurs électriques synchrones monophasés sont considérés ici: réactifs et réactifs à condensateur.

Sur la fig. 3-19 montre un schéma structurel du moteur à réluctance monophasé le plus simple, connu dans l'art sous le nom de roue de La Cour. Le stator 1 et le rotor 2 sont assemblés à partir de tôles embouties d'acier électrique. Une bobine est enroulée sur le stator, alimentée par un réseau de courant alternatif monophasé, qui crée un champ magnétique pulsé. Le moteur à réaction tire son nom du fait que le rotor tourne en raison des réactions de deux forces d'attraction magnétique.
Avec un champ pulsé, le moteur n'a pas de couple de démarrage et doit être tourné à la main. Les forces magnétiques agissant sur les dents du rotor ont tout le temps tendance à le mettre contre les pôles du stator, car dans cette position la résistance au flux magnétique sera minimale. Cependant, le rotor par inertie dépasse cette position pendant le temps où le champ pulsatoire diminue. Avec la prochaine augmentation du champ magnétique, les forces magnétiques agissent sur une autre dent du rotor et sa rotation se poursuivra. Pour la stabilité du cap, le rotor d'un moteur électrique réactif doit avoir une grande inertie.
Les moteurs électriques réactifs ne fonctionnent de manière stable qu'à une faible vitesse de rotation de l'ordre de 100 à 200 tr/min. Leur puissance ne dépasse généralement pas 10-15 watts. La vitesse du rotor est déterminée par la fréquence du réseau f et le nombre de dents du rotor Z. Puisque le rotor tourne de 1/Z de tour en un demi-cycle de changement du flux magnétique, puis en 1 min contenant 60 2 f demi -cycles, il tournera 60 2 tours f / Z . A une fréquence de courant alternatif de 50 Hz, la vitesse du rotor est de :
![]()
Pour augmenter le couple, augmentez le nombre de dents sur le stator. Le plus grand effet peut être obtenu en faisant autant de dents sur le stator que sur le rotor. Dans ce cas, l'attraction magnétique agira simultanément non pas sur une paire de dents, mais sur toutes les dents du rotor, et le couple augmentera considérablement. Dans de tels moteurs électriques, l'enroulement du stator est constitué de petites bobines qui sont enroulées sur la jante du stator dans les espaces entre les dents. Dans les lecteurs électriques des anciens types, un tel moteur électrique était utilisé avec 77 dents sur le stator et sur le rotor, ce qui fournissait une vitesse de rotation du disque de 78 tr/min. Le rotor était d'une seule pièce avec le disque sur lequel était posée la plaque. Pour démarrer le moteur électrique, il fallait pousser le disque avec le doigt.
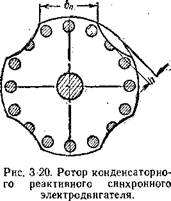
Le stator d'un moteur à réluctance à condensateur synchrone n'est pas différent du stator d'un moteur à induction à condensateur. Le rotor d'un moteur électrique peut être fabriqué à partir du rotor d'un moteur électrique asynchrone en y fraisant des rainures en fonction du nombre de pôles (Fig. 3-20). Dans ce cas, les tiges de la cage d'écureuil sont partiellement coupées. Dans la production en usine de tels moteurs électriques avec des tôles de rotor embouties avec des rebords polaires, une partie des tiges de la cage d'écureuil joue le rôle d'un enroulement de démarrage. Le rotor commence à tourner de la même manière que le rotor d'un moteur électrique asynchrone, puis il est entraîné en synchronisme avec le champ magnétique et tourne alors à une fréquence synchrone.
Qualité de travail moteur à condensateur dépend fortement du mode dans lequel le moteur électrique a un champ tournant circulaire. L'ellipticité du champ en mode synchrone entraîne une augmentation du bruit, des vibrations et une violation de l'uniformité de rotation. Si un champ tournant circulaire se produit en mode asynchrone, le moteur a un bon couple de démarrage, mais de petits couples d'entrée et de sortie. Lorsque le champ circulaire est décalé vers des fréquences plus élevées, le couple de démarrage diminue, et les instants d'entrée et de sortie de synchronisme augmentent. Les plus grands instants d'entrée et de sortie de synchronisme sont obtenus lorsque le champ tournant circulaire a lieu en mode synchrone. Dans ce cas, cependant, le couple de démarrage est fortement réduit. Afin de l'augmenter, la résistance active de l'enroulement du rotor court-circuité est généralement quelque peu augmentée.
L'inconvénient de certains types de moteurs à réluctance à condensateur est le blocage du rotor, ce qui signifie qu'au démarrage, le rotor ne tourne pas, mais s'arrête dans n'importe quelle position.
Le grippage du rotor se produit généralement dans les moteurs avec un rapport malheureux entre les dimensions des cavités et les saillies des pôles. Le plus grand couple réactif à une faible puissance consommée par le moteur électrique est obtenu lorsque le rapport de l'arc polaire b p à la division polaire t est d'environ 0,5 à 0,6 et que la profondeur des cavités h est 9 à 10 fois supérieure à celle de l'air entre les saillies polaires et le stator.
Une caractéristique positive des moteurs à réluctance de condensateur est un facteur de puissance élevé, qui est beaucoup plus élevé que celui des moteurs triphasés et atteint parfois 0,9-0,95. En effet, l'inductance d'un moteur à condensateur est largement compensée par la capacité du condensateur.
Les moteurs à réluctance synchrone sont les plus courants moteurs synchrones en raison de la simplicité de conception, du faible coût et de l'absence de contacts glissants. Ils ont trouvé une application dans les circuits de communication synchrone, les films sonores, les enregistrements sonores et les installations de télévision.
3-9. UTILISATION DE MOTEURS ÉLECTRIQUES ASYNCHRONES TRIPHASÉS EN MONOPHASÉ
En pratique, il existe des cas où vous devez connecter un moteur électrique triphasé à réseau monophasé. Auparavant, on pensait que cela nécessitait de rembobiner le stator du moteur électrique. À l'heure actuelle, de nombreux schémas de connexion de moteurs électriques triphasés à un réseau monophasé ont été développés et testés dans la pratique sans aucune modification des enroulements du stator.
Les condensateurs sont utilisés comme éléments de démarrage.
Les conclusions de l'enroulement du stator d'un moteur électrique triphasé portent les désignations suivantes : C1 - le début de la première phase ; C2 - début de la deuxième phase ; NW - début de la troisième phase ; C4 - fin de la première phase ; C5 - fin de la deuxième phase ; C6—fin de la troisième phase. Ces désignations sont gravées sur des étiquettes métalliques portées sur les fils conducteurs de l'enroulement.
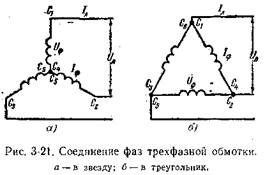
L'enroulement d'un moteur électrique triphasé peut être connecté en étoile (Fig. 3-21, a) ou en triangle (Fig. 3-21, b). Lorsqu'ils sont connectés à une étoile, les débuts ou les extrémités des trois phases sont connectées à un point et les trois sorties restantes sont connectées à un réseau triphasé. Lors de la connexion à un triangle, la fin de la première phase est connectée au début de la seconde, la fin de la seconde au début de la troisième et la fin de la troisième au début de la première. Des fils sont tirés des points de connexion pour connecter le moteur électrique à réseau triphasé.
Dans un système triphasé, les tensions et courants de phase et linéaires sont distingués. Lorsqu'ils sont connectés à une étoile, les relations suivantes s'établissent entre eux :
lorsqu'il est connecté en triangle
La plupart des moteurs électriques triphasés sont produits pour deux tensions linéaires, par exemple 127/220 V ou 220/380 V. À une tension de réseau inférieure, l'enroulement est connecté en triangle, et à une tension plus élevée, en étoile . Pour de tels moteurs électriques, les six conducteurs terminaux de l'enroulement sont sortis sur la carte: des pinces.
Cependant, il existe des moteurs électriques pour une tension secteur, dans lesquels l'enroulement est connecté en étoile ou en triangle à l'intérieur du moteur électrique, et seuls trois conducteurs sont amenés au bornier. Bien entendu, dans ce cas, il serait possible de démonter le moteur électrique, de déconnecter les liaisons entre phases et de tirer trois conclusions supplémentaires. Cependant, vous ne pouvez pas le faire en utilisant l'un des schémas de connexion d'un moteur électrique à un réseau monophasé, qui sont donnés ci-dessous.
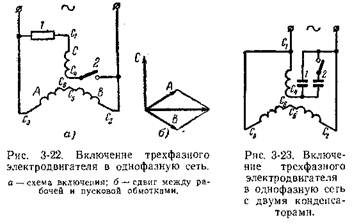
Un schéma de principe de l'inclusion d'un moteur électrique triphasé à six sorties dans un réseau monophasé est illustré à la fig. 3-22, a. Pour ce faire, deux phases sont connectées en série et connectées à un réseau monophasé, et la troisième phase leur est connectée en parallèle, comprenant un élément de démarrage 1 avec un interrupteur 2. Une résistance active ou un condensateur peut servir de élément de départ. Dans ce cas, l'enroulement de travail occupera les 2/3 des encoches du stator et l'enroulement de démarrage 1/3. Ainsi, un enroulement triphasé fournit le rapport d'encoche requis entre les enroulements de travail et de démarrage. Avec cette connexion, l'angle entre les enroulements de travail et de démarrage est de 90 ° el. (Fig. 3-22, b).
Lors de la connexion de deux phases en série, il est nécessaire de s'assurer qu'elles sont connectées selon, et non contre, quand n. Avec. les phases connectées sont soustraites. Comme on peut le voir sur le schéma de la Fig. 3-22, a, les extrémités des deuxième et troisième phases C 5 et C 6 sont reliées à un point commun.
Il est possible d'utiliser un moteur électrique triphasé comme condensateur selon le schéma de la Fig. 3-23 avec un condensateur de travail 1 ou avec des condensateurs de travail 1 et de démarrage 2. Avec un tel schéma de commutation, la capacité du condensateur de travail, μF, est déterminée par la formule :
Où je - courant nominal moteur électrique, A ; U est la tension secteur, V.
Un moteur électrique triphasé à trois bornes et un enroulement statorique connecté en étoile est connecté à un réseau monophasé selon le schéma de la Fig. 3-24. Dans ce cas, la capacité du condensateur de travail est déterminée par la formule
Tension du condensateur U 1 = 1,3 U.
Un moteur électrique triphasé à trois bornes et un enroulement de stator connecté en triangle est connecté à un réseau monophasé selon le schéma de la Fig. 3-25. La capacité du condensateur de travail est déterminée par la formule
Tension du condensateur U=1,15 V.
Dans les trois cas, la capacité condensateurs de démarrage peut être déterminé approximativement à partir de la relation
![]()
Lors du choix d'un circuit de commutation, il convient d'être guidé par la tension pour laquelle un moteur électrique triphasé est conçu et la tension d'un réseau monophasé. Dans ce cas, la tension de phase du triphasé

Exemple. Un moteur électrique triphasé d'une puissance de 250 W, d'une tension de 127/220 V avec un courant nominal de 2/1,15 A doit être raccordé à un réseau monophasé d'une tension de 220 V.
Lors de l'utilisation du schéma de la Fig. 3-24 capacité du condensateur de travail :
![]()
tension sur le condensateur U 1 \u003d 1,3 220 \u003d 286 V.
Condensateur de démarrage
Lors de l'utilisation d'un moteur électrique triphasé en tant que moteur monophasé, sa puissance est réduite à 50%, en tant que condensateur monophasé - jusqu'à 70% de la puissance nominale d'un moteur électrique triphasé.
NV Vinogradov, Yu.N. Vinogradov
Comment calculer et fabriquer soi-même un moteur électrique
Moscou 1974
La facilité de conversion de la tension alternative en a fait la plus largement utilisée dans l'alimentation électrique. Dans le domaine de la conception des moteurs électriques, un autre avantage du courant alternatif a été découvert : la possibilité de créer un champ magnétique tournant sans transformations supplémentaires ou avec un minimum de transformations.
Par conséquent, même malgré certaines pertes dues à la résistance réactive (inductive) des enroulements, la facilité de création de moteurs à courant alternatif a contribué à la victoire sur l'alimentation en courant continu au début du XXe siècle.
Fondamentalement, les moteurs à courant alternatif peuvent être divisés en deux groupes :
asynchrone
Dans ceux-ci, la vitesse de rotation du rotor diffère de la rotation du champ magnétique, de sorte qu'ils peuvent fonctionner à une grande variété de vitesses. Ce type de moteur à courant alternatif est le plus répandu à notre époque. Synchrone
Ces moteurs ont une liaison rigide entre la vitesse du rotor et la vitesse de rotation du champ magnétique. Ils sont plus difficiles à fabriquer et moins souples d'utilisation (le changement de vitesse à fréquence fixe du réseau d'alimentation n'est possible qu'en changeant le nombre de pôles du stator).
Ils ne sont utilisés qu'à des puissances élevées de plusieurs centaines de kilowatts, où leur rendement supérieur par rapport aux moteurs électriques asynchrones réduit considérablement les pertes de chaleur.
MOTEUR ÉLECTRIQUE ASYNCHRONE AC
Le type le plus courant de moteur asynchrone est un moteur électrique avec rotor à cage d'écureuil du type "cage d'écureuil", où un ensemble de tiges conductrices est posé dans les rainures inclinées du rotor, reliées par des anneaux aux extrémités.
L'histoire de ce type de moteurs électriques remonte à plus de cent ans, lorsqu'on s'est aperçu qu'un objet conducteur placé dans l'entrefer du noyau d'un électroaimant à courant alternatif avait tendance à s'en échapper en raison de l'apparition d'une induction EMF dans avec un vecteur opposé.
Ainsi, un moteur à induction avec un rotor à cage d'écureuil n'a pas de nœuds de contact mécaniques, à l'exception des paliers de support du rotor, ce qui fournit aux moteurs de ce type non seulement un prix bas, mais également une durabilité maximale. Grâce à cela, les moteurs électriques de ce type sont devenus les plus courants dans l'industrie moderne.
Cependant, ils présentent également certains inconvénients dont il faut tenir compte lors de la conception de moteurs électriques asynchrones de ce type :
Courant de démarrage élevé- étant donné qu'au moment où le moteur électrique asynchrone sans balais est connecté au réseau, la résistance réactive de l'enroulement du stator n'est pas encore affectée par le champ magnétique créé par le rotor, une forte surtension se produit, plusieurs fois supérieure à la consommation de courant nominale .
Cette caractéristique du fonctionnement des moteurs de ce type doit être incluse dans toute alimentation électrique conçue afin d'éviter les surcharges, en particulier lors de la connexion de moteurs électriques asynchrones à des générateurs mobiles à puissance limitée.
Couple de démarrage faible- les moteurs électriques avec un enroulement court-circuité ont une dépendance prononcée du couple à la vitesse, leur inclusion sous charge est donc hautement indésirable: le temps pour atteindre le mode nominal et les courants de démarrage augmentent considérablement, l'enroulement du stator est surchargé.
Par exemple, que se passe-t-il lorsque vous allumez pompes profondes- dans les circuits électriques de leur alimentation, il est nécessaire de prendre en compte une marge de courant de cinq à sept fois.
Impossibilité de démarrage direct dans les circuits à courant monophasé- pour que le rotor commence à tourner, une poussée de démarrage ou l'introduction d'enroulements de phase supplémentaires déphasés les uns par rapport aux autres est nécessaire.
Pour démarrer un moteur à courant alternatif asynchrone dans un réseau monophasé, on utilise soit un enroulement de démarrage à commutation manuelle, qui est désactivé après la rotation du rotor, soit un deuxième enroulement connecté via un élément de déphasage (le plus souvent, un condensateur de la capacité requise).
Incapacité à obtenir une vitesse élevée- bien que la rotation du rotor ne soit pas synchronisée avec la fréquence de rotation du champ magnétique du stator, il ne peut pas le conduire, donc, dans un réseau 50 Hz, la vitesse maximale pour un moteur électrique asynchrone à rotor à cage d'écureuil n'est pas plus de 3000 tr/min.
L'augmentation de la vitesse d'un moteur à induction nécessite l'utilisation d'un convertisseur de fréquence (onduleur), ce qui rend un tel système plus coûteux qu'un moteur à collecteur. De plus, à mesure que la fréquence augmente, les pertes réactives augmentent.
La difficulté d'organiser l'inverse- cela nécessite un arrêt complet du moteur et un changement de phase, en version monophasée - un déphasage dans l'enroulement de démarrage ou de deuxième phase.
Il est plus pratique d'utiliser un moteur électrique asynchrone dans un réseau triphasé industriel, car la création d'un champ magnétique tournant est réalisée par les enroulements de phase eux-mêmes sans dispositifs supplémentaires.
En fait, un circuit composé d'un générateur triphasé et d'un moteur électrique peut être considéré comme un exemple de transmission électrique : l'entraînement du générateur y crée un champ magnétique tournant, qui est converti en oscillations courant électrique, qui à son tour excite la rotation du champ magnétique dans le moteur électrique.
De plus, il est doté d'une alimentation triphasée moteurs électriques asynchrones ont le rendement le plus élevé, car dans un réseau monophasé, le champ magnétique créé par le stator peut essentiellement être décomposé en deux champs antiphasés, ce qui augmente les pertes inutiles dues à la saturation du noyau. Par conséquent, les puissants moteurs électriques monophasés sont généralement réalisés en fonction du circuit collecteur.
COLLECTEUR DE MOTEUR ÉLECTRIQUE CA
Dans les moteurs électriques de ce type, le champ magnétique du rotor est créé par des enroulements de phase reliés au collecteur. En fait, un moteur à courant alternatif à collecteur est différent d'un moteur courant continu uniquement par le fait que la réactance des enroulements est incluse dans son calcul.
Dans certains cas, même des moteurs à collecteur universel sont créés, où l'enroulement du stator a une prise d'une partie incomplète pour l'inclusion dans le réseau alternatif, et une source de courant continu peut être connectée sur toute la longueur de l'enroulement.
Les avantages de ce type de moteur sont évidents :
Capacité à travailler à des cadences élevées vous permet de créer des moteurs électriques à collecteur avec une vitesse de rotation allant jusqu'à plusieurs dizaines de milliers de tours par minute, familiers à tous des perceuses électriques.
Pas besoin de déclencheurs supplémentaires contrairement aux moteurs à cage d'écureuil.
Couple de démarrage élevé, ce qui accélère la sortie en mode de fonctionnement, y compris en charge. De plus, le couple du moteur collecteur est inversement proportionnel à la vitesse et, avec une augmentation de la charge, il évite une chute de la vitesse.
Facilité de contrôle du chiffre d'affaires- comme ils dépendent de la tension d'alimentation, il suffit de disposer d'un simple régulateur de tension à triac pour régler la vitesse dans les limites les plus larges. En cas de panne du régulateur, le moteur du collecteur peut être connecté directement au réseau.
Moins d'inertie du rotor- il peut être rendu beaucoup plus compact qu'avec un circuit à cage d'écureuil, grâce à quoi le moteur du collecteur lui-même devient sensiblement plus petit.
De plus, le moteur du collecteur peut simplement être inversé, ce qui est particulièrement important lors de la création de divers types d'outils électriques et d'un certain nombre de machines-outils.
Pour ces raisons, les moteurs à collecteur sont largement utilisés dans tous les consommateurs monophasés où un contrôle de vitesse flexible est nécessaire : dans les outils électriques portatifs, les aspirateurs, appareils de cuisine etc. Cependant, un certain nombre caractéristiques de conception détermine les spécificités du fonctionnement du moteur électrique collecteur :
Les moteurs de collecteur nécessitent un remplacement régulier des balais qui s'usent avec le temps. Le collecteur lui-même s'use, tandis que le moteur à rotor à cage d'écureuil, comme déjà mentionné ci-dessus, soumis à un remplacement peu fréquent des roulements, est presque éternel.
L'inévitable étincelle entre le collecteur et les balais (la raison de l'odeur familière d'ozone lorsque le moteur du collecteur est en marche) réduit non seulement davantage la ressource, mais nécessite également des mesures de sécurité accrues pendant le fonctionnement en raison de la probabilité d'inflammation de gaz combustibles ou poussière.
© 2012-2017 Tous droits réservés.
Tous les documents présentés sur ce site sont à titre informatif uniquement et ne peuvent pas être utilisés comme lignes directrices et documents normatifs.
Domaines d'utilisation. Des moteurs asynchrones de faible puissance (15 - 600 W) sont utilisés dans appareils automatiques et des appareils électriques pour entraîner des ventilateurs, des pompes et d'autres équipements qui ne nécessitent pas de contrôle de vitesse. Les appareils électroménagers et les appareils automatiques utilisent généralement des micromoteurs monophasés, car ces appareils et appareils sont généralement alimentés par un réseau à courant alternatif monophasé.
Le principe de fonctionnement et le dispositif d'un moteur monophasé. L'enroulement du stator d'un moteur monophasé (Fig. 4.60, un) situés dans des encoches occupant environ les deux tiers de la circonférence du stator, ce qui correspond à une paire de pôles. Par conséquent
(voir Chap. 3) la distribution de la MMF et de l'induction dans l'entrefer est proche de la sinusoïdale. Depuis que l'enroulement passe courant alternatif, le MDS pulse au rythme de la fréquence du réseau. Induction en un point arbitraire de l'entrefer
V x = V m sinωtcos (πх/τ).
Ainsi, dans un moteur monophasé, l'enroulement statorique crée un flux stationnaire qui varie dans le temps, et non un flux tournant circulaire, comme dans les moteurs triphasés à alimentation symétrique.
Pour simplifier l'analyse des propriétés d'un moteur monophasé, on représente (4.99) sous la forme
V x \u003d 0,5V t sin (ωt - πx / τ) + 0,5V t sin (ωt + πx / τ),.
c'est-à-dire que nous remplaçons le flux pulsé stationnaire par la somme de champs circulaires identiques tournant dans des directions opposées et ayant les mêmes fréquences de rotation : n 1inc = n 1 tour = n une . Les propriétés d'un moteur asynchrone à champ tournant circulaire étant détaillées aux § 4.7 - 4.12, l'analyse des propriétés d'un moteur monophasé peut se réduire à considérer l'action combinée de chacun des champs tournants. En d'autres termes, un moteur monophasé peut être représenté comme deux moteurs identiques, dont les rotors sont interconnectés de manière rigide (Fig. 4.60, b), avec le sens de rotation opposé des champs magnétiques et les moments qu'ils créent Mà M arr. Le champ dont le sens de rotation coïncide avec le sens de rotation du rotor est dit direct ; champ de sens inverse - inverse ou inverse.
Supposons que le sens de rotation des rotors coïncide avec le sens de l'un des champs tournants, par exemple avec n etc. Alors le glissement du rotor par rapport au flux F etc
s pr \u003d (n 1pr - n 2) / n 1pr \u003d (n 1 - n 2) / n 1 \u003d 1 - n 2 / n 1..
Glissement du rotor par rapport au débit Ф arr
s arr \u003d (n 1 arr + n 2) / n 1 arr \u003d (n 1 + n 2) / n 1 \u003d 1 + n 2 / n 1..
De (4.100) et (4.101) il résulte que
s o6p \u003d 1 + p 2 / n 1 \u003d 2 - s pr..
Moments électromagnétiques Mà M arr, formés par des champs directs et inverses, sont dirigés vers côtés opposés, et le moment résultant d'un moteur monophasé M la coupe est égale à la différence de moments à la même vitesse de rotor.
Sur la fig. 4.61 montre la dépendance M = f(s) pour un moteur monophasé. En regardant la figure, nous pouvons tirer les conclusions suivantes :
a) un moteur monophasé n'a pas de couple de démarrage ; il tourne dans le sens où il est entraîné par une force extérieure ; b) la vitesse de rotation d'un moteur monophasé au ralenti est inférieure à celle de moteur triphasé, du fait de la présence d'un couple de freinage généré par le champ inverse ;
c) les performances d'un moteur monophasé sont inférieures à celles d'un moteur triphasé ; il a un glissement accru à la charge nominale, un rendement inférieur, une capacité de surcharge inférieure, ce qui est également dû à la présence d'un champ inverse ;
d) la puissance d'un moteur monophasé est d'environ 2/3 de la puissance d'un moteur triphasé de même taille, car dans un moteur monophasé, l'enroulement de travail n'occupe que 2/3 des encoches du stator. Remplir toutes les fentes du stator
puisque dans ce cas le coefficient d'enroulement s'avère faible, la consommation de cuivre augmente d'environ 1,5 fois, tandis que la puissance n'augmente que de 12 %.
Dispositifs de démarrage. Pour obtenir le couple de démarrage, moteurs monophasés avoir un enroulement de démarrage décalé de 90 degrés électriques par rapport à l'enroulement de travail principal. Pendant la période de démarrage, l'enroulement de démarrage est connecté au réseau via des éléments déphaseurs - capacité ou résistance active. Après la fin de l'accélération du moteur, l'enroulement de démarrage est coupé, tandis que le moteur continue de fonctionner en monophasé. Comme l'enroulement de démarrage ne fonctionne que pendant une courte période, il est constitué d'un fil de section inférieure à celui de travail et placé dans un nombre de rainures plus petit.
Examinons de plus près le processus de démarrage lors de l'utilisation de la capacité C comme élément de déphasage (Fig. 4.62, a). Sur l'enroulement de départ P tension
Ú
1p = Ú
1 - Ú
C= Ú
1 +jÍ 1 P X C, c'est-à-dire qu'il est déphasé par rapport à la tension secteur Vous 1 appliqué à l'enroulement de travail R. Par conséquent, les vecteurs de courant dans le travail je 1p et lanceur je 1n enroulements sont déphasés d'un certain angle. En choisissant d'une certaine manière la capacité du condensateur déphaseur, il est possible d'obtenir un mode de fonctionnement au démarrage proche du symétrique (Fig. 4.62, b), c'est-à-dire d'obtenir un champ tournant circulaire. Sur la fig. 4.62, les dépendances sont affichées M = f(s) pour le moteur avec bobinage de démarrage activé (courbe 1) et désactivé (courbe 2). Le moteur est démarré en pièces un B caractéristiques 1 ; à ce point b l'enroulement de démarrage est désactivé et, à l'avenir, le moteur tourne en partie CO caractéristiques 2.
Étant donné que l'inclusion du deuxième enroulement améliore considérablement les caractéristiques mécaniques du moteur, dans certains cas, des moteurs monophasés sont utilisés dans lesquels les enroulements A et B
inclus tout le temps (Fig. 4.63, a). Ces moteurs sont appelés moteurs à condensateur.
Les deux enroulements des moteurs à condensateur occupent, en règle générale, le même nombre d'emplacements et ont la même puissance. Lors du démarrage d'un moteur à condensateur, afin d'augmenter le couple de démarrage, il est conseillé d'avoir une capacité accrue C p + C p. Une fois le moteur accéléré selon la caractéristique 2 (Fig. 4.63, b) et le courant diminue, partie des condensateurs Cn est désactivé de sorte qu'en mode nominal (lorsque le courant du moteur devient plus petit qu'au démarrage) pour augmenter la capacité et assurer le fonctionnement du moteur dans des conditions proches du fonctionnement avec un champ tournant circulaire. Dans ce cas, le moteur fonctionne sur la caractéristique 1.
Le moteur à condensateur a un cos φ élevé. Ses inconvénients sont la masse et les dimensions relativement importantes du condensateur, ainsi que l'apparition d'un courant non sinusoïdal lors de la distorsion de la tension d'alimentation, ce qui dans certains cas conduit à effets nuisibles sur la ligne de communication.
Dans des conditions de démarrage légères (petit couple de charge pendant la période de démarrage), des moteurs avec résistance de démarrage sont utilisés. R(Fig. 4.64, a). Disponibilité résistance active dans le circuit de l'enroulement de démarrage fournit un déphasage φ p plus petit entre la tension et le courant dans cet enroulement (Fig. 4.64, b) que le déphasage φ p dans l'enroulement de travail. A cet égard, les courants dans le monde du travail et enroulements de démarrage sont déphasés d'un angle φ p - φ p et forment un champ tournant asymétrique (elliptique), grâce auquel le couple de démarrage se produit. Les moteurs avec résistance de démarrage fonctionnent de manière fiable et sont fabriqués en série. La résistance de démarrage est intégrée dans le carter du moteur et refroidie avec le même air qui refroidit l'ensemble du moteur.
Micromoteurs monophasés à pôles blindés. Dans ces moteurs, l'enroulement du stator connecté au réseau est généralement concentré et renforcé sur des pôles prononcés (Fig. 4.65, a), dont les feuilles sont estampées avec le stator. Dans chaque pôle, l'une des pattes est recouverte d'un enroulement auxiliaire, constitué d'une ou plusieurs spires en court-circuit, qui blindent de 1/5 à 1/2 de l'arc polaire. Le rotor du moteur est de type conventionnel à cage d'écureuil.
Le flux magnétique de la machine créé par l'enroulement du stator (flux polaire) peut être représenté comme la somme de deux composants (Fig. 4.65, b) ty bobine; Ф n2 - flux traversant la partie du pôle, protégé par une bobine en court-circuit.
Les flux Ф p1 et Ф p2 traversent différentes parties de la pièce polaire, c'est-à-dire qu'ils se déplacent dans l'espace d'un angle β. De plus, ils sont déphasés par rapport à la MDS F n enroulements de stator à différents angles - γ 1 et γ 2. Ceci s'explique par le fait que chaque pôle du moteur décrit peut être considéré en première approximation comme un transformateur dont l'enroulement primaire est l'enroulement du stator et l'enroulement secondaire est une bobine en court-circuit. Le flux d'enroulement du stator induit une FEM dans une bobine court-circuitée Eà (Fig. 4.65, c), à la suite de quoi un courant se produit je vers et MDS F k, repliable avec MDS F n enroulements de stator. Composante de courant réactif je pour réduire le débit Ф p2, et actif - le décale en phase par rapport à MDS F n. Étant donné que le flux Ф p1 ne couvre pas la bobine court-circuitée, l'angle γ 1 a une valeur relativement faible (4-9 °) - approximativement la même que l'angle de déphasage entre le flux du transformateur et le MMF du primaire bobinage en mode mouvement oisif. L'angle γ 2 est beaucoup plus grand (environ 45°), c'est-à-dire le même que dans un transformateur avec un enroulement secondaire en court-circuit (par exemple, dans un transformateur de mesure de courant). Ceci s'explique par le fait que les pertes de puissance, dont dépend l'angle γ 2 , sont déterminées non seulement par les pertes de puissance magnétique dans l'acier, mais également par les pertes électriques dans la bobine en court-circuit.
Riz. 4.65. Schémas de structure d'un moteur monophasé à pôles blindés et ses
diagramme vectoriel :
1
- stator ; 2 -
enroulement du stator; 3 -
en court-circuit
bobine; 4 -
rotor; 5
- poteau
Les flux Ф p1 et Ф p2, décalés dans l'espace d'un angle β et déphasés dans le temps d'un angle γ = γ 2 - γ l, forment un champ magnétique tournant elliptique (voir Chap. 3), qui génère un couple agissant sur le rotor du moteur dans le sens allant de la première pièce polaire, non recouverte par une bobine en court-circuit, vers la deuxième pointe (conformément à l'alternance des maxima de flux "phase").
Pour augmenter le couple de démarrage du moteur considéré en rapprochant son champ tournant d'un champ circulaire, différentes méthodes sont utilisées : des shunts magnétiques sont installés entre les pièces polaires des pôles adjacents, ce qui renforce la liaison magnétique entre l'enroulement principal et le court-circuit. bobine en circuit et améliorer la forme du champ magnétique dans l'entrefer ; augmenter l'entrefer sous la pointe, non recouvert par une bobine en court-circuit; utilisez deux virages court-circuités ou plus sur une pointe avec différents angles de couverture. Il existe également des moteurs sans spires en court-circuit sur les pôles, mais avec un système magnétique asymétrique : différentes configurations des différentes parties du pôle et différents entrefers. De tels moteurs ont un couple de démarrage inférieur à celui des moteurs à pôles blindés, mais leur rendement est supérieur, car ils n'ont pas de pertes de puissance dans les spires en court-circuit.
Les conceptions envisagées de moteurs à pôles blindés sont irréversibles. Pour inverser dans de tels moteurs, des bobines sont utilisées à la place des spires court-circuitées. B1, B2, B3 et À 4 HEURES(Fig. 4.65, dans), dont chacun couvre un demi-pôle. Court-circuiter une paire de bobines EN 1 et À 4 HEURES ou EN 2 et À 3, il est possible de blinder l'une ou l'autre moitié du pôle et ainsi de changer le sens de rotation du champ magnétique et du rotor.
Le moteur à pôles blindés présente un certain nombre d'inconvénients importants : un encombrement et un poids relativement importants ; faible cos φ ≈ 0,4 ÷ 0,6 ; faible rendement η = 0,25 ÷ 0,4 en raison de pertes importantes dans la bobine en court-circuit ; petit couple de démarrage, etc. Les avantages du moteur sont la simplicité de conception et, par conséquent, une grande fiabilité de fonctionnement. En raison de l'absence de dents sur le stator, le bruit du moteur est négligeable, il est donc souvent utilisé dans les appareils de reproduction de la musique et de la parole.
Le moteur électrique monophasé 220V est un mécanisme séparé largement utilisé pour l'installation dans une variété d'appareils. Il peut être utilisé à des fins domestiques et industrielles. Aliments moteur électrique effectué à partir de prise ordinaire où il y a nécessairement une puissance d'au moins 220 volts. Dans ce cas, il faut faire attention à la fréquence de 60 hertz.
Dans la pratique, il a été prouvé qu'un moteur électrique monophasé 220 V est vendu avec des appareils qui aider à convertir l'énergie du champ électrique, et également accumuler la charge nécessaire à l'aide d'un condensateur. Modèles modernes, qui sont produits à l'aide de technologies innovantes, les moteurs électriques 220V sont en outre équipés d'un équipement permettant d'éclairer le lieu de travail de l'appareil. Ceci s'applique aux pièces internes et externes.
Il est important de se rappeler que la capacité du condensateur doit être stockée conformément à toutes les exigences de base. La meilleure option est où la température de l'air reste la même et ne subit aucune fluctuation. Dans la chambre régime de température ne doit pas tomber à une valeur négative.
Pendant l'utilisation du moteur, les experts recommandent de mesurer de temps en temps la valeur de capacité du condensateur.
Les moteurs à induction sont largement utilisés aujourd'hui pour divers processus industriels. Pour différents entraînements, ce modèle particulier de moteur électrique est utilisé. Conceptions asynchrones monophasées aider à conduire des machines à bois, des pompes, des compresseurs, des appareils de ventilation industrielle, des convoyeurs, des élévateurs et de nombreux autres équipements.
Le moteur électrique est également utilisé pour entraîner la mécanisation à petite échelle. Il s'agit notamment des broyeurs d'alimentation et des malaxeurs à béton. Il est nécessaire d'acheter de telles structures uniquement auprès de fournisseurs de confiance. Avant d'acheter, il est conseillé de vérifier les certificats de conformité et la garantie du fabricant.
Les fournisseurs doivent fournir à leurs clients entretien des services moteur électrique en cas de casse ou de panne. C'est l'un des principaux composants qui est complété lors de l'assemblage de l'unité de pompe.
Série existante de moteurs électriques
Aujourd'hui entreprises industrielles produire les séries suivantes de moteur électrique monophasé 220V :

Tous les moteurs subdivisé selon la conception, selon le mode d'installation, ainsi que le degré de protection. Cela vous permet de protéger la structure de l'humidité ou des particules mécaniques.
Caractéristiques des moteurs électriques de la série A
Les moteurs électriques monophasés de la série A sont des conceptions asynchrones unifiées. Ils sont fermés de influence externe avec un rotor à cage d'écureuil.
La structure du moteur comprend les groupes d'exécution suivants :

Le coût d'un moteur électrique monophasé 220V dépend de la série.
Quels sont les types de moteurs ?

Les moteurs monophasés sont conçus pour compléter les entraînements électriques à usage domestique et industriel. Ces structures sont fabriquées conformément aux normes nationales.