DCモーターは何でできていますか? ブラシレス DC モーター
電気モーター 直流変換する他のタイプの機械の前に発明された 電気エネルギーメカニカルに。 後にエンジンが最も広く使用されたという事実にもかかわらず 交流電流、DCモーターに代わるものがないアプリケーションがあります。
DCおよびACモーター
発明の歴史
ヤコビ電気モーター。
DC電気モーター(DCモーター)の動作原理を理解するために、その作成の歴史に目を向けます。 したがって、電気エネルギーを機械エネルギーに変換できるという最初の実験的証拠は、マイケル・ファラデーによって実証されました。 1821年、彼は底に永久磁石がある水銀で満たされた容器に導体を降ろして実験を行いました。 導体に電気を加えた後、導体は磁石の周りを回転し始め、容器内に存在する磁場に対する反応を示しました。 ファラデーの実験は実用化には至りませんでしたが、電気機械の作成の可能性を証明し、電気機械の発展をもたらしました。
最初 電気エンジン可動部分(ローター)の回転原理に基づいた直流は、1834年にロシアの物理学者で機械工のボリス・セメノビッチ・ヤコビによって作成されました。 このデバイスは次のように機能しました。
記述された原理は、Jacobi が 1839 年に 12 人の乗客を乗せたボートに取り付けたエンジンで使用されました。 船は流れに逆らって 3 km/h の速度 (他の情報源によると - 4.5 km/h) でぎくしゃくしていましたが、川を渡って乗客を岸に上陸させることに成功しました。 320個のガルバニ電池を搭載したバッテリーを動力源として使用し、移動はパドルホイールを使用して実行されました。
この問題のさらなる研究により、研究者は、どの電源を使用するのが最適か、その性能を改善し、その寸法を最適化する方法に関する多くの疑問を解決しました。
1886 年、フランク ジュリアン スプラーグは、今日使用されているものと同様の設計の直流電気モーターを最初に設計しました。 それは自励の原理と電気機械の可逆性の原理を実装しました。 この時までに、このタイプのすべてのエンジンは、より適切な電源である DC 発電機からの電力に切り替えられました。
ブラシコレクターユニットが提供する 電気接続機械の静止部分に配置されたチェーンを備えたローターチェーン
装置と動作原理
最新のDPTでは、荷電導体と磁場との相互作用と同じ原理が使用されています。 技術の向上に伴い、デバイスにはパフォーマンスを向上させるいくつかの要素のみが追加されています。 たとえば、最近では永久磁石は低出力モーターでのみ使用されています。これは、大型の機械ではスペースを取りすぎるためです。
基本原理
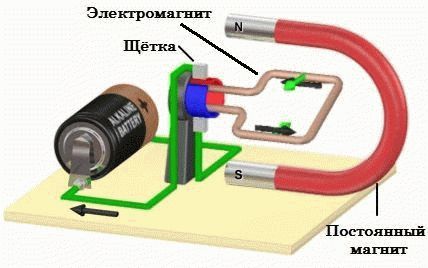
このタイプのエンジンの最初のプロトタイプは、最新のデバイスよりも著しく単純でした。 彼らの原始的な装置には、2 つの磁石からなる固定子と、電流が流れる巻線を備えた電機子のみが含まれていました。 磁場の相互作用の原理を研究した後、設計者は次のエンジン動作アルゴリズムを決定しました。
- 電源は、電機子巻線に電磁界を生成します。
- ポールエレクトロ 磁場永久磁石の磁場の同じ極から反発します。
- アーマチュアは、それが取り付けられているシャフトとともに、巻線の反発フィールドに従って回転します。
このアルゴリズムは理論上は完全に機能しましたが、実際には、最初のエンジンの作成者はマシンの動作を妨げる特定の問題に直面しました。
- エンジンが始動できないデッドポジション - ポールが互いに正確に向き合っている場合。
- ポールの抵抗力が強い、反発力が弱いなどの理由で発進できない。
- ローターは 1 回転すると停止します。 これは、円の半分を通過した後、磁石の吸引力が加速せず、ローターの回転が遅くなったためです。
最初の問題の解決策はすぐに見つかりました。このために、2 つ以上の磁石を使用することが提案されました。 その後、いくつかの巻線とコレクターブラシアセンブリがモーターデバイスに含まれ、特定の時点で1対の巻線にのみ電力を供給しました。
コレクターブラシ電流供給システムは、ローターブレーキの問題も解決します-ローターの回転が遅くなり始める瞬間まで極性の切り替えが発生します。 これは、モーターが 1 回転する間に少なくとも 2 回極性が反転することを意味します。
低突入電流の問題については、別のセクションで後述します。
デザイン
そのため、永久磁石がモーターハウジングに固定され、ステーターが形成され、その中にローターが配置されます。 電機子巻線に電力が供給されると、固定子の磁場と相互作用する電磁場が発生します。これにより、シャフトにしっかりと取り付けられた回転子が回転します。 伝送用 電流ソースからアーマチュアまで、エンジンには以下で構成されるコレクターブラシアセンブリが装備されています。
- コレクタ。 これは、電機子巻線に接続され、モーター シャフトに直接取り付けられた、誘電体によって分離された複数のセクションからなる集電リングです。
- グラファイト ブラシ。 それらは、圧力ばねによってコレクタの接触パッドに押し付けられるブラシを使用して、コレクタと電源の間の回路を閉じます。
電機子巻線は一方が互いに接続され、他方がコレクタ部に接続され、入力ブラシ→回転子巻線→出力ブラシの経路で電流が流れる回路を形成します。
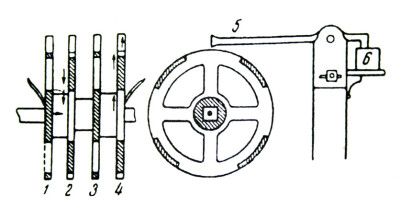
減少 回路図(図3)は、2つのセクションのコレクターを備えた原始的なDCモーターの動作原理を示しています。
- この例では、図に示すようにローターの開始位置を考えます。 そのため、「+」でマークされた下部ブラシに電力が供給された後、電流が巻線を流れ、その周りに電磁場が作成されます。
- ギムレット規則によると、錨の北極は左下部分に形成され、南極は右上部分に形成されます。 同じ名前の固定子極の近くに配置されているため、それらは反発し始め、それによって回転子が動き始めます。これは、反対側の極が互いに最小距離になるまで、つまり最終位置に到達するまで続きます(図. 1)。
- この段階でのコレクタの設計により、電機子巻線の極性が反転します。 この結果、磁場の極は再び至近距離になり、反発し始めます。
- ローターが 1 回転し、コレクターが再び極性を反転して動き続けます。
DCモーター部品
ここでは、すでに述べたように、基本プロトタイプの動作原理が示されています。 実際のモーターは 2 つ以上の磁石を使用し、整流子はより多くの接触パッドで構成されているため、スムーズな回転が保証されます。
高出力モーターでは、永久磁石はサイズが大きいため使用できません。 それらの代替手段は、それぞれが電源バスバーに接続された独自の巻線を持つ複数の導電性ロッドのシステムです。 同じ名前の極が直列にネットワークに含まれています。 本体には 1 ~ 4 対の極を配置でき、その数はコレクターの集電ブラシの数に対応している必要があります。
高出力用に設計された電気モーターには、「軽量」のモーターよりも多くの機能上の利点があります。 たとえば、集電ブラシの局所的な配置は、シャフトに対して特定の角度でブラシを回転させ、「アーマチュア反作用」と呼ばれるシャフトの制動を補償します。
始動電流
モーターローターに、中断のない動作を保証し、セクターブレーキを排除する追加の要素を徐々に装備すると、始動の問題が発生します。 しかし、これらすべてがローターの重量を増加させます-シャフトの抵抗を考慮すると、シャフトをその場所から押すのがより困難になります。 この問題に対する最初の解決策は、最初に供給される電流を増やすことかもしれませんが、これは不快な結果につながる可能性があります。
- ラインのサーキットブレーカーは電流に耐えられず、オフになります。
- 巻線は過負荷で燃え尽きます。
- コレクターのスイッチングセクターは、過熱により溶着します。
したがって、そのような決定はむしろ危険な中途半端な措置と言えます。
一般に、この問題はDCモーターの主な欠点ですが、一部の分野では不可欠であるため、主な利点も含まれています。 この利点は、起動直後にトルクが直接伝達されることにあります。シャフトが動き始めた場合、シャフトはどんな負荷でも回転します。 AC モーターはこれに対応していません。
これまでのところ、この問題は完全には解決されていません。 今日まで、このようなエンジンを始動するために、自動スターターが使用されており、その動作原理は自動車のギアボックスに似ています。
- まず、電流が徐々に開始値まで上昇します。
- その場から「ずれ」た後、電流値が急降下し、再び滑らかに上昇する「シャフトの回転調整」。
- 限界値まで上昇した後、現在の強さは再び減少し、「調整」されます。
このサイクルが繰り返されます 3~5回(図4)ネットワークに重大な負荷が発生することなくエンジンを始動する必要性を解決します。 実際、「ソフト」スタートはまだありませんが、機器は安全に動作し、DC モーターの主な利点であるトルクは維持されます。
配線図
DC モーターの接続は、AC 仕様のモーターに比べてやや困難です。
高速エンジン用 ミディアムパワー、原則として、励磁巻線(OV)の特別な接点とアーマチュアが配置されています 端子箱. ほとんどの場合、ソースの出力電圧がアーマチュアに適用され、原則としてレオスタットによって調整された電流がOBに適用されます。 モーターの回転速度は、励磁巻線に印加される電流の強さに直接依存します。
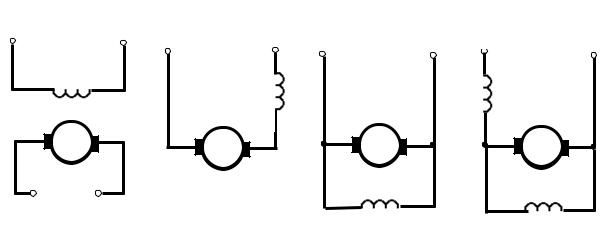
DC モーターの電機子巻線と励磁巻線をオンに切り替えるには、主に 3 つの方法があります。
- 直列励磁は、始動時に大きな電流が必要なモーター(電気自動車、レンタル機器など)に使用されます。 このスキーム提供します シリアル接続 OV とソースへのアンカー。 電圧を印加した後、同じ大きさの電流が電機子巻線とOBを通過します連続励磁でシャフトの負荷を4分の1でも減らすと、速度が急激に増加することに注意してください。エンジンが故障するため、この回路は一定負荷の条件下で使用されます。
- 起動時に軸に大きな負荷がかからない工作機械やファンなどの動作を保証するモータには、並列励磁が用いられます。 この回路では、独立した巻線を使用して OF を励起します。これはほとんどの場合、レオスタットによって調整されます。
- 独立励磁は並列励磁と非常に似ていますが、この場合、独立した電源を使用して OB に電力を供給するため、アーマチュアと励磁巻線の間の電気的接続がなくなります。
最新の DC 電気モーターでは、説明した 3 つに基づいて混合回路を使用できます。
回転数調整
DPT の速度を調整する方法は、接続のスキームによって異なります。
- 並列励磁のモーターでは、公称値に対する速度の減少は電機子電圧を変更することで実行でき、増加は励磁の流れを弱めることで実行できます。 速度を上げるには (公称値の 4 倍以下)、OB 回路にレオスタットを追加します。
- 直列励磁の場合、調整は電機子回路の可変抵抗で簡単に行えます。 確かに、この方法は速度を下げる場合にのみ適しており、比率が 1:3 または 1:2 の場合にのみ適しています (さらに、これはレオスタットで大きな損失につながります)。 増加は、OB 回路の調整抵抗器を使用して実行されます。
これらの回路は、調整範囲が狭く、その他の欠点があるため、最新のハイテク機器ではめったに使用されません。 今日では、これらの目的のために電子制御回路がますます作成されています。
逆転
DCモーターの回転を逆にする(逆にする)には、次のことが必要です。
- シリアル励起の場合 - 入力接点の極性を変更するだけです。
- 混合励磁と並列励磁の場合 - 電機子巻線の電流の方向を変える必要があります。 RH の破裂は注入されたの重大な増加につながることができます 起電力電線の絶縁破壊。
適用範囲
すでに理解されているように、ネットワークへの永続的な中断のない接続が実現できない状況では、DC モーターを使用することをお勧めします。 ここでの良い例は、エンジンを押す車のスターターです。 内燃機関「その場から」、またはモーター付きの子供用おもちゃ。 これらの場合、エンジンを始動するために使用されます 充電式電池. 工業目的では、DPT は圧延機で使用されます。
DPTの主な適用分野は電気輸送です。 蒸気船、電気機関車、路面電車、トロリーバス、およびその他の同様のものは、非常に大きな始動抵抗を持っています。 ソフト特性と幅広い回転調整。 環境輸送技術の急速な発展と普及により、DPT の範囲は拡大の一途をたどっています。
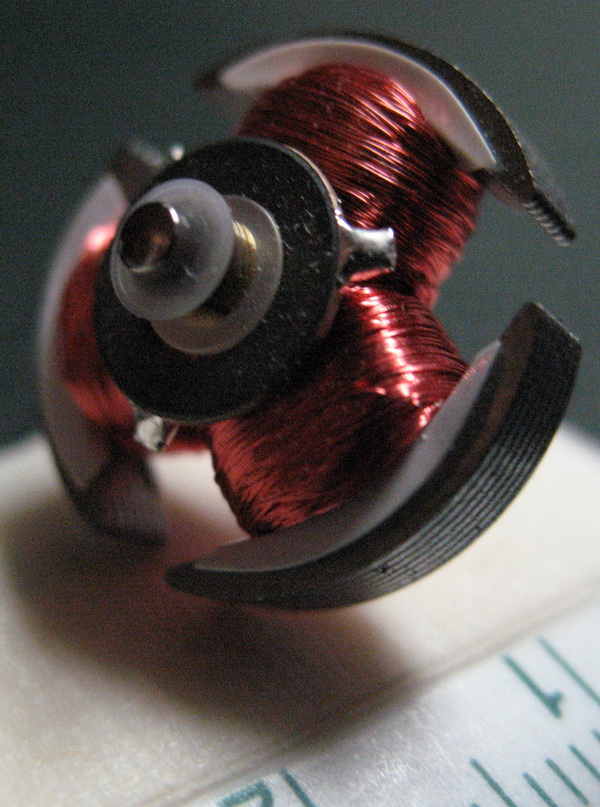
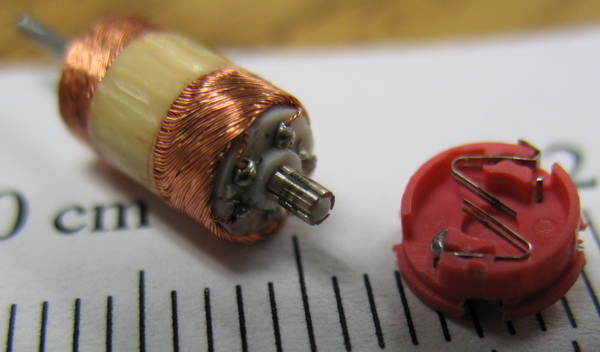
最も単純なブラシコレクターの組み立て
長所と短所
上記のすべてを要約すると、AC で動作するように設計された対応する DC モーターと比較して、DC モーターの長所と短所の特徴を説明することができます。
主な利点:
- 強力な始動トルクが必要な場合、DCT は不可欠です。
- アーマチュアの回転速度は簡単に調整できます。
- DCモーターはユニバーサルです 電気機械、つまり、ジェネレーターとして使用できます。
主な欠点:
- DPT の生産コストは高くなります。
- ブラシコレクターアセンブリを使用すると、頻繁なメンテナンスと修理が必要になります。
- 動作には DC 電源または整流器が必要です。
もちろん、DCモーターは、コストと信頼性の点で「可変」の親戚に負けますが、特定の領域での使用の利点はすべての欠点を断固として打ち消すため、使用され、使用されます。
火花が発生。 これにより、マシンの信頼性が低下し、その範囲が制限されます。
DCT の重大な欠点は、AC 電気エネルギーを DC 電気エネルギーに事前に変換する必要があることです。
13.2. DCモーターの装置と動作原理
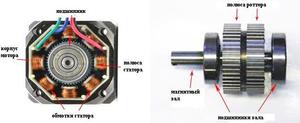
DC モーターは、次の 3 つの主要部分で構成されています。
– 固定部分はインダクタ付きのベッドです。
– 回転部分 - アンカー;
– コレクターはアーマチュア シャフトに取り付けられ、それと一緒に回転します。
インダクタ - 機械のフレームの周囲に取り付けられた固定電磁石 (極) のシステムで、コア、磁束および巻線の必要な分布を作成するために必要な磁極片で構成されています。
励磁巻線と呼ばれます。
コアとポールピースは電磁鋼板でできています。
鋳造または溶接されたベッドは、鋳鉄または鋼でできており、ポールとベアリングシールドが取り付けられており、そこにアーマチュアシャフトベアリングが固定されています。 ベッドはマシンのヨークでもあり、磁気回路を確実に閉じます。
インダクタの目的は、電流が界磁巻線を通過するときに磁束を生成することです。
アーマチュアは、歯付きコアと巻線で構成されています
の と呼ばれるコアの溝アンカー巻き。電機子コアはシート電気でできています
スチール(厚さ0.5 mm)、そこから溝のあるディスクが打ち出されます。 ディスクは、渦電流損失を減らすために絶縁ワニスでコーティングされています。
電機子巻線は、絶縁された銅線で作られたコイルの形をしたセクションです。
巻線方式はループまたはウェーブで、コイルは直列および並列に接続できます。 単純なループ巻線には、低電力の 2 極機があります
(最大 1 kW) および 500 kW を超える電力の機械。 電圧が 110 V 以上の低出力および中出力 (最大 500 kW) の機械には、単純な波巻きが使用されます。
電機子の目的は、電機子巻線の電流と励磁電流によって生成される極の磁場との相互作用によって電磁トルクを生成することです。
コレクターは、くさび形の銅板 (「ダブテール」の形) で構成される中空のシリンダーで、互いに分離され、本体から分離されています。 コレクタ プレートもマシン シャフトから分離されています。
組み立てられたコレクタは、アーマチュア シャフトに取り付けられます。 アーマチュアの溝に配置された巻線セクションの始点と終点は、コレクタ プレートにはんだ付けされます。
コレクターには、固定されたエレクトログラファイトブラシが取り付けられています。 回転する電機子巻線は、ブラシと整流子の間の滑り接触によって外部回路に接続されます。
ブラシは閉じた電機子巻線を並列分岐に分割します。並列分岐の数はブラシの数に等しいため、ブラシのEMF(機械のEMF)は1つの並列分岐のEMFに等しくなります。
コレクタは電気機械変換器であり、1つの極のゾーンから移動する電機子巻線の導体の電流の方向を変更することにより、(モーターの)方向にトルク定数を作成します
別の領域に。
で 発電機では、コレクターは、回転電機子巻線で誘導される可変 EMF の整流を提供します。
上のDPT指定 電気回路図とその動作原理を図に示します。 97a、b。
FEM |
||
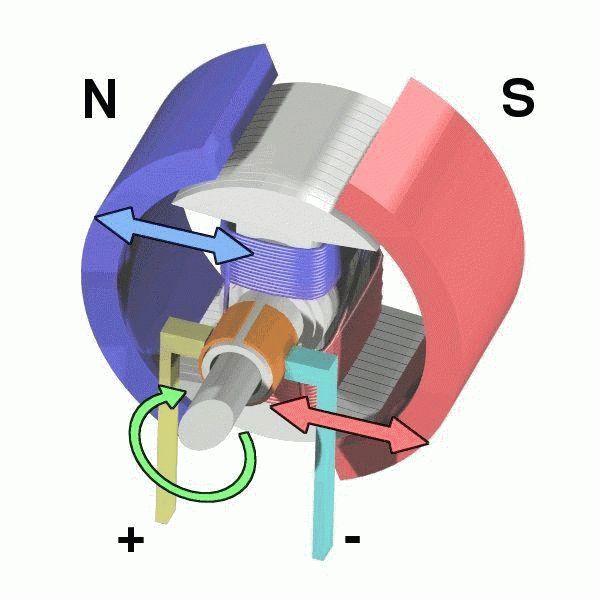
DC 電源からの電圧が固定アーマチュアの端子に印加されます。 アーマチュアの電流の方向 I I を図のようにします。 97b。
で 励磁巻線インダクタの極にあるコイルにも直流が供給され、アーマチュアを貫通する磁場を生成します。 インダクタの極が 硬磁性材料その場合、それらに励磁巻線がなくても、反対に磁化された極 (N と S) によって磁場が生成されます。
極の磁場と電機子電流の相互作用により、電磁力 F EM が形成され、トルクが発生します。
M C F I ,
ここで、C m は比例係数です。 F は DPT の励磁電流、I I は DPT の電機子電流です。
磁場内で回転する DPT アーマチュアでは、アーマチュア電流の方向とは反対の EMF が誘導されるため、この EMF は逆起電力または逆起電力と呼ばれます。
ECEFn、
ここで、C E は比例係数です。 Ф – DPT 励起フロー; n – DPT 回転周波数。
エンジンの基本式
Uc \u003d E + Iya Rya、
ここで、U s は電源電圧、I i は電機子電流、R i は電機子巻線の抵抗です。
電機子電流はどこから来るのか
I i Uс R i E.

値 E をこの式に代入すると、DC モーターの速度が得られます。
U c | 私 | |||
CEF |
||||
この式から、DCT の回転速度は入力電圧の大きさ、励起電流 (磁束) に依存することがわかります。
Ф I c)、アンカー チェーンの抵抗 R i およびシャフトの負荷 I i .
13.3. DCモーターの種類
励磁巻線と電機子巻線の接続方法に応じて、DCTは次のタイプに分類されます。
– 独立した励起を伴うDPT(図98、a);
– 順次励起によるDPT(図98、b)。
– 並列励起によるDPT(図98、c);
– 混合励起によるDPT(図98、d)。
で 独立励起のDPT励磁巻線電機子巻線は さまざまなソース. 励磁巻線は次のように指定されています:H1 - H2(図98、a)。
高出力モーターは、通常、独立した励起で実行されます。
で DCT 直列励磁励磁巻線接続次々と電機子巻線に、シリアルと呼ばれます(C1 - C2、図98、b)。
で 直列励磁のモーターは、並列励磁のモーターよりも負荷時のトルクが増加します。エンジン速度が低下している間。この特性は、機械製造の電気機関車、都市輸送における DPT の広範な使用を決定します。
ただし、エンジン速度が許容周波数を超える可能性があり、これが事故につながる可能性があるため、負荷なしで直列励磁でエンジンを始動することは容認できません。エンジンは「故障」します。
で 並列励磁励磁巻線を接続した DCTシャントと呼ばれる電機子巻線と並列に
(W1 - W2、図 98、c)。
並列励起のモーターは、さまざまな負荷の下で安定した速度を提供し、この速度をスムーズに調整する可能性があります。 したがって、並列励磁を備えた DCT は、さまざまな負荷の下で一定の速度を必要とする電気駆動装置に使用されます。
と それの滑らかな広い調節。 Z1
混合励磁の DCT は最高の始動トルクを持ち、かなりの始動トルクが必要な場合、または短期間の過負荷と高加速が可能な場合 (コンプレッサーの始動など) に使用されます。
要件に応じて、並列および直列励磁巻線を「一致」または「反対」に接続できます。 「子音」を含めると、巻線の磁束は同じように向けられ、「カウンター」で加算されます-それらは減算されます。
すべての電気モーターが直流で動作できると明確に言えるわけではありません。 コレクタ タイプを参照します。 DC電気モーターの動作原理であるデバイスは、それに基づいています。 固定子は一連の巻線で構成され、それぞれがシャフトの円弧の限られた部分でのみ動作します。 そうでなければ、コンセプトは実現できません。
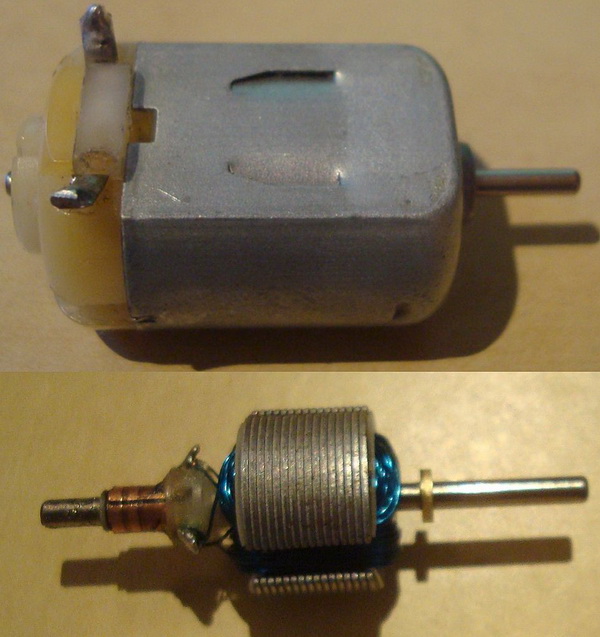
コレクターモーター操作
コレクターモーターは、家電製品のあらゆる場所で使用されています。 ホーム アプリケーションの 90% がこのセグメントにあります。 洗濯機、掃除機、電動工具のエンジン。 例外として、冷蔵庫、扇風機、送風機、一部のフードを呼びましょう。 沈黙の要件によって引き起こされます。 小型のバッテリー駆動車がどのように駆動するかを聞いたことがある人なら誰でも理解できます。 夜になるとざわめきが聞こえてきますが、 整流子モーター大騒ぎするでしょう。 朝の6時にグラインダーを1〜2秒間オンにしてみてください-理解できます。
法律によると、夜間の音圧レベルは 30 dB を超えません。 そうしないと、テクニックが干渉します 安らかな睡眠. 騒音はコレクターのブラシの摩擦によって引き起こされ、モーターローターは比較的重く、ベアリングにわずかなずれが生じます。 バックラッシュがあり、可動部分がより重厚で、音響効果がより目立ちます。 コレクターモーターには多くの欠点がありますが、直流で動作できます。 寸法を小さくするには、コイルの数を減らします。 回転方向を一意に指定するには最低 3 つの極が必要であり、それらが並列に動作することはありません。
家電製品のコレクタモータには多数の回転子極があります。 以下は、DC の簡略図です。 コレクターモーターは同様のモードで動作し、より多くのステーター磁石があり、すべて電気的です。 電力は 220 ボルトの交流電圧によって供給されます。 主な秘密に来てください! コレクターモーターに交流の直流電流を供給しても違いはありません。 素人の視点から。 いくつかの機能があります:
- 直流で給電すると効率が上がります。 入力電力は比例して減少し、利用効率が向上します。 固定子巻線には、2 つではなく 3 つの結論が装備されています。 直流で給電する場合、巻数の一部が使用されます。 交流電流は固定子のコイル全体を流れます。
- 一定の磁場では、磁化反転効果は消えます。 DCモーターの磁気回路の電磁鋼板の加熱を大幅に低減します。 これは、ローターとステーターのベアリングベースの製造に対する要件が低いことに反映されています。 磁気回路をワニス絶縁のプレートに分離しないことも可能です。 いずれにせよ、ほとんどの DC コレクター モーターは AC 操作にも適しています。 磁気回路は電磁鋼板で構成されています。
- 間接的なプラスは、高速安定性です。 直流で回転速度を調整するには、電圧振幅の変化を使用します。交流では、電力線に沿った正弦波の一部がサイリスタ キーを使用して遮断されます。 最後のオプションは洗濯機で使用されます。
- 交流のリバースは、巻線を再スイッチングすることによって実行されます。 相互に包含の方向を変更します。 での手続き 洗濯機特別リレーを行います。 DC モーターでは、固定子極は鉄 (ネオジム) 磁石に置き換えられます。 電源の極性を変えて逆にするだけで十分です。 操作はリレーまたはコンタクタを使用して実行できます。 巻線が電気で駆動されている場合、再転流を使用してシャフトの回転方向を変更します。
家電製品の整流子モーターでは、ステーターがローターと直列に接続されています。 エネルギーをシャフトに伝達するために、セクションに分割されたドラムの形で集電体が使用されます。 クランプ スプリング付きのグラファイト ブラシが電極として機能します。 ハウジングでは、固定子と回転子のリードが分離されており、リバース機能を実装する可能性があります。 接点の中には補助的なものがあります:ホールセンサーの3つの出力(2つのタコメーター)、温度ヒューズの端。
シャフトが回転すると、ブラシが徐々に次のセクションに切り替わり、ローターの極がシフトします。 ステーターはそのままです。 電源周波数の 2 倍 (50 Hz) で極性が変化することに注意してください。相互作用の性質は変わりません。 極が反発するように、極が引き寄せるのとは異なります。 巻線の特別な分布、コレクターとの整流により、希望の回転方向が保証されます。 電源電圧のタイプ(DCまたはAC)からのエンジンの独立性が明らかにされています。 このタイプのデバイスに固有のコレクター機器のいくつかの機能については、以下をお読みください。
ブラシがドラム上を移動すると、火花が発生します。
動作原理
バリスタは火花を消すために使用されます。
EMF値は許容できないサイズに成長し、保護抵抗は数万倍に減少し、過電流はケースによって短絡されます。 バリスタはペアで使用します。 整流子モーターのハウジングを通して両方のブラシを組み合わせます。 掃除機のプラグは、多くの場合、接地端子を奪われていますが、バリスタ保護が正常に供給されています。 火花はスチールケースで閉じられています。 大きいサイズ、大量加熱はありません。 このようなフリルが付いたコレクタ モーターを片手で取り、もう一方の手で接地された金属構造物 (非常階段、水道、下水管、ガス管、避雷針タイヤ、アンテナ ケーブルの編組) をつかむのは致命的に危険です。
本体の頬は取り外し可能
電動工具のケースには取り外し可能なチークが付属しており、ブラシは数分で交換できます。 機器の分解の手間を省きます。 メンテナンス. ブラシの摩耗の兆候は、強い火花です。 機器が消耗しています。 新しいブラシは、こすると火花がたくさん出ます。 摩耗の場合、出力の低下が観察されます。 ドリルはドリルの回転を停止し、洗濯機のドラムはロードされた洗濯物の公称重量で停止します。 オリジナルのブラシを入手できるとは限りません。コンポーネントは、研削ツールで必要なサイズに研ぐことができます。
スパーク回転、失速
ドラムが汚れているとスパーク、失速が見られます。 ローターを取り外し、適切な薬剤 (アルコール) で洗浄します。
DCモーターのデバイスは、交流電圧で動作するモデルと変わりません。 上記は、どのタイプの機器にも当てはまります。
DCモーターの操作
最も単純なモーターの集電体の下には 2 つのセクションがあります。 コレクタードラムが劣化しています。 各接触薄板 (シャフト上のプレート) は半回転します。 一方のブラシには正の電位が供給され、もう一方のブラシには負の電位が供給され、それに応じて極の磁場の方向が変化します。 2 つは常にアクティブです (上記の構成で)。 固定子は、一定の電場または金属磁石によって形成することができます。 後者は子供用の車で使用されます。
DCモーターはどのように機能しますか。 最初の時点で、巻線が図のように配置されているとします。 この例では、前述のように極が 2 つではなく、3 つになっています。 DC 電気モーターを目的の方向に安定して始動させるための最小数。 巻線はスター回路で接続されており、各ペアには 1 つの共通点があります。 電界強度は 2 つの負の極と 1 つの正の極を形成します。 永久磁石は図のように立っています。
![]()
DCケースの簡略図
ターンの 3 分の 1 ごとに、ラメラの供給電圧の変化に応じて極がシフトするように、フィールドが再分配されます。 2 番目の図では、巻線の数がシフトし、空間の画像が残っています。 安定性の保証: 一方の極は永久磁石に引き付けられ、もう一方の極は反発します。 リバースが必要な場合は、接続するバッテリー(蓄電池)の極性が変わります。 その結果、2 つのプラス極と 1 つのマイナス極ができます。 シャフトは反時計回りに動きます。
直流電動機の動作原理は明らかになっていると思います。 今日、バルブタイプのエンジンが一般的であることを付け加えます。 多くの人が、固定子で磁場を交互にすることを考えました。回転子は永久磁石になります。 第一近似として、バルブ式エンジン。 切り替えられたサイリスタ キーを介して、必要な固定子巻線に直流が供給されます。 その結果、フィールドの望ましい分布が作成されます。
このスキームの利点は、メンテナンスと修理の必要性を引き起こす摩擦部品の数を減らすことにあります。 サイリスタ制御ユニットは非常に複雑です。 ラメラを使用して切り替えを整理することができます。 同時に、設計は粗いシャフト位置センサーとして機能します(シャフト軸の接触パッド間の距離をプラスまたはマイナスします)。 バルブモーターは新品ではありません。 特定の業界で広く使用されています。 回転数を正確に維持するのに役立ちます。 日常生活では、ブラシレスモーターを見つけるのは困難です。 洗濯機にもいくつかの類似点が見られます。 排水ポンプについて話しています(ローターは磁気で、交流のみです)。
DCモーターの技術的特性は、交流で駆動する場合よりも優れています。 デバイス クラスは広く使用されています。 多くの場合、DC モーターは、さまざまな種類のバッテリーで駆動する場合に使用されます。 選択の余地がないとき。 電源回路の利点により、バッテリーを長持ちさせることができます。
固定子と回転子の巻線は直列、並列に接続されています。 後者は、シャフトが初期状態でロードされたときに適用されます。 速度が急激に上昇するため、ローターが簡単に動きすぎると、悪影響が生じる可能性があります。 彼らは、自分の手でエンジンを設計するというトピックで、同様の微妙な点について言及しました。
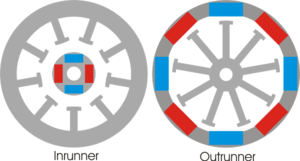
DC モーターは、直流で駆動される電気モーターです。 必要に応じて、比較的低速で高トルクのモーターを入手してください。 構造的には、固定ステーターがハウジングとして機能できるため、インランナーはよりシンプルです。 マウントデバイスを取り付けることができます。 アウトランナーの場合、アウター全体が回転します。 エンジンは、固定車軸または固定子部品によって固定されています。 モーター ホイールの場合、固定は固定子の固定軸に対して行われ、ワイヤーは 0.5 mm 未満の中空軸を通って固定子に運ばれます。
DC モーターには次の種類があります。
ACモーターと呼ばれる 交流で動く電気モーター. 次のタイプの AC モーターがあります。
交流と直流の両方で動作モードの機能を備えたUKD(ユニバーサル整流子モーター)もあります。
別のタイプのエンジンは、 有限数の回転子位置を持つステッピング モーター. 必要な対応する巻線に電力を供給することにより、回転子の特定の指示位置が固定されます。 電源電圧が 1 つの巻線から取り除かれ、他の巻線に転送されると、別の位置への移行プロセスが発生します。
商用ネットワークから電力を供給されている場合、AC モーターは通常達成できません。 毎分 3,000 回転以上の速度. このため、より高い周波数を得る必要がある場合には、コレクタモータが使用され、必要な電力を維持しながら軽量でコンパクトになるという利点があります。
 場合によっては、乗数と呼ばれる特別な伝送メカニズムも使用されます。これにより、デバイスの運動学的パラメーターが必要な技術指標に変更されます。 コレクタ アセンブリは、モータ全体の最大半分のスペースを占有する場合があるため、AC モータは、周波数変換器を使用することで小型化および軽量化されます。 頻度の増加 400Hzまで。
場合によっては、乗数と呼ばれる特別な伝送メカニズムも使用されます。これにより、デバイスの運動学的パラメーターが必要な技術指標に変更されます。 コレクタ アセンブリは、モータ全体の最大半分のスペースを占有する場合があるため、AC モータは、周波数変換器を使用することで小型化および軽量化されます。 頻度の増加 400Hzまで。
任意のリソース 誘導電動機交流電流はコレクターよりも著しく高いです。 決まっている 巻線とベアリングの絶縁状態. インバーターとローター位置センサーを使用する場合、同期モーターは、DC 動作をサポートする従来のコレクター モーターの電子アナログと見なされます。
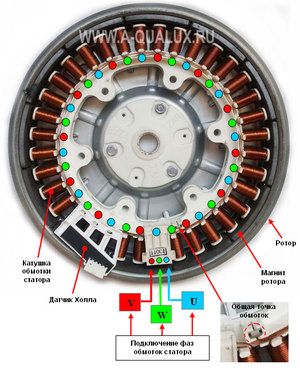
ブラシレス DC モーター。 一般情報と装置装置
 ブラシレス DC モーターは、三相ブラシレス モーターとも呼ばれます。 これは同期装置であり、その動作原理は自己同期周波数調整に基づいており、これにより固定子磁場のベクトル (回転子の位置から始まる) が制御されます。
ブラシレス DC モーターは、三相ブラシレス モーターとも呼ばれます。 これは同期装置であり、その動作原理は自己同期周波数調整に基づいており、これにより固定子磁場のベクトル (回転子の位置から始まる) が制御されます。
このタイプのモーターコントローラーは、多くの場合、 定電圧そこから彼らの名前が付けられました。 英語の技術文献では、ブラシレス モーターは PMSM または BLDC と呼ばれます。
ブラシレス モーターは、主に最適化するために作成されました。 任意の DC モーター一般的。 このようなデバイスのアクチュエータには、非常に高い要求が課されました (特に、正確な位置決めを行う高速マイクロドライブ)。
これは、おそらく、そのような特定のDCデバイス、ブラシレスの使用につながりました 三相モーター、BDPT とも呼ばれます。 それらは設計上実質的に同一です。 同期モーター交流。磁気回転子の回転は、三相巻線の存在下で従来の積層固定子で発生し、回転数は固定子の電圧と負荷に依存します。 回転子の特定の座標に基づいて、異なる固定子巻線が切り替えられます。
 ブラシレス DC モーターは個別のセンサーなしで存在できますが、ホール センサーなどのローターに存在する場合があります。 デバイスが追加のセンサーなしで動作する場合、 ステータ巻線は固定要素として機能します. 次に、ローターがステーター巻線にEMFを誘導すると、磁石の回転により電流が発生します。
ブラシレス DC モーターは個別のセンサーなしで存在できますが、ホール センサーなどのローターに存在する場合があります。 デバイスが追加のセンサーなしで動作する場合、 ステータ巻線は固定要素として機能します. 次に、ローターがステーター巻線にEMFを誘導すると、磁石の回転により電流が発生します。
巻線の1つがオフになっている場合、誘導された信号が測定され、さらに処理されますが、そのような動作原理は信号処理教授なしでは不可能です。 しかし、そのような電気モーターを逆転または制動するために、ブリッジ回路は必要ありません。固定子巻線に逆のシーケンスで制御パルスを供給するだけで十分です。
VD(スイッチドモーター)では、永久磁石の形のインダクターがローターに配置され、電機子巻線がステーターに配置されます。 ローターの位置を基準に、 すべての巻線の供給電圧が形成されます電気モーター。 コレクターのこのような構造で使用される場合、その機能は、半導体スイッチによってバルブモーターで実行されます。
同期モーターとブラシレスモーターの主な違いは、ローターとフィールドの回転の比例周波数を決定するDPRの助けを借りた後者の自己同期です。
ほとんどの場合、ブラシレス DC モーターは次の分野で使用されます。

ステーター
このデバイスはクラシックなデザインで、非同期マシンの同じデバイスに似ています。 構成には以下が含まれます 銅巻芯(溝の周囲に配置)、フェーズ数とハウジングを決定します。 通常、回転と自己始動にはサイン相とコサイン相で十分ですが、多くの場合、バルブ モーターは 3 相、さらには 4 相にされます。
固定子巻線の巻き方のタイプに応じて逆起電力を持つ電気モーターは、2つのタイプに分けられます。
- 正弦波形式;
- 台形。
対応するモータのタイプでは、電気相電流も正弦波または台形波の供給方法によって変化します。
ローター
 通常、回転子は 2 ~ 8 対の極を備えた永久磁石でできており、北から南へ、またはその逆に交互に配置されます。
通常、回転子は 2 ~ 8 対の極を備えた永久磁石でできており、北から南へ、またはその逆に交互に配置されます。
ローターの製造に最も一般的で安価なのはフェライト磁石ですが、その欠点は次のとおりです。 低レベル磁気誘導したがって、さまざまな希土類元素の合金で作られたデバイスが、現在、そのような材料に取って代わりつつあります。 上級磁気誘導により、ローターのサイズを小さくすることができます。
DPR
ローター位置センサーにより、 フィードバック. 動作原理によれば、デバイスは次の亜種に分類されます。
- 誘導;
- 光電;
- ホール効果センサー。
後者のタイプは、そのため、最も人気があります ほぼ絶対的な慣性を持たない特性ローターの位置によってフィードバックチャネルの遅延を取り除く機能。
制御システム
制御システムは、電流インバーターまたは電圧インバーターの収集につながる、絶縁ゲートを含む電源スイッチ、場合によってはサイリスターまたはパワー トランジスターで構成されます。 これらのキーを管理するプロセスは、ほとんどの場合実装されています マイクロコントローラを使用してこれは、エンジンを制御するために膨大な量の計算操作を必要とします。
動作原理
エンジンの動作は、ローターとステーターの磁場のベクトルが直交するように、コントローラーが特定の数のステーター巻線を切り替えるという事実にあります。 PWM(パルス幅変調)あり コントローラーはモーターに流れる電流を制御しますローターにかかるトルクを調整します。 この作用モーメントの方向は、ベクトル間の角度のマークによって決まります。 計算には電気度が使用されます。
 切り替えは、Ф0 (回転子励磁磁束) が電機子磁束に対して一定に保たれるように実行する必要があります。 このような励磁とアーマチュアの流れが相互作用すると、トルク M が形成され、ロータを回転させる傾向があり、同時に励磁とアーマチュアの流れの一致が保証されます。 ただし、回転子の回転中に、回転子位置センサーの影響下でさまざまな巻線が切り替えられ、その結果、電機子磁束は次のステップに向かって変わります。
切り替えは、Ф0 (回転子励磁磁束) が電機子磁束に対して一定に保たれるように実行する必要があります。 このような励磁とアーマチュアの流れが相互作用すると、トルク M が形成され、ロータを回転させる傾向があり、同時に励磁とアーマチュアの流れの一致が保証されます。 ただし、回転子の回転中に、回転子位置センサーの影響下でさまざまな巻線が切り替えられ、その結果、電機子磁束は次のステップに向かって変わります。
このような状況では、結果として得られるベクトルがシフトし、回転子の磁束に対して静止した状態になり、モーター シャフトに必要なトルクが発生します。
エンジン管理
ブラシレス DC 電気モーターのコントローラーは、パルス幅変調の値を変更することによって、ローターに作用するモーメントを調整します。 スイッチングが制御され、 電子的に行われる、いつもと違って ブラシモーター直流。 また、ワークフロー用のパルス幅変調およびパルス幅調整アルゴリズムを実装する制御システムも一般的です。
 ベクトル制御モーターは、自己速度制御の範囲が最も広く知られています。 この速度の調整と、必要なレベルでの鎖交磁束の維持は、周波数変換器によるものです。
ベクトル制御モーターは、自己速度制御の範囲が最も広く知られています。 この速度の調整と、必要なレベルでの鎖交磁束の維持は、周波数変換器によるものです。
ベクトル制御に基づく電気駆動装置の調整の特徴は、制御された座標の存在です。 それらは固定システムにあり、 回転に変換、ベクトルの制御されたパラメーターに比例する定数値を強調表示します。これにより、制御アクションが形成され、次に逆の遷移が発生します。
このようなシステムのすべての利点にもかかわらず、広い範囲で速度を制御するためのデバイスを制御する複雑さという形で欠点も伴います。
長所と短所
現在、多くの業界で、このタイプのモーターは非常に需要があります。 最高の資質非接触およびその他のタイプのモーター。
ブラシレス モーターの明白な利点は次のとおりです。
重大なプラスにもかかわらず、 ブラシレス DC モーターまた、いくつかの欠点があります。

前述のことと、この地域での最新の電子機器の開発が遅れていることに基づいて、多くの人は、周波数変換器を備えた従来の非同期モーターを使用することが依然として適切であると考えています。
三相ブラシレスDCモーター
このタイプのモーターは、特に位置センサーによる制御を行う場合に優れた性能を発揮します。 抵抗の瞬間が変化するか、まったくわからない場合、および達成する必要がある場合 より高い始動トルクセンサー制御を採用。 センサーが使用されていない場合 (通常はファンで)、制御により有線通信が不要になります。
位置センサーなしで三相ブラシレス モーターを制御する機能:

コントロール機能 三相ブラシレスモーターホール効果センサーの例を使用した位置エンコーダー:

結論
ブラシレス DC モーターには多くの利点があり、専門家と単純な素人の両方が使用する価値のある選択肢です。
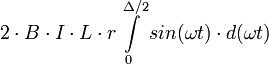
最初の近似では、回転子の 2 つの位置 (2 つの「デッド スポット」) があり、そこから自己始動が不可能であり、不均一なトルクがあります (固定子極 B の磁場は均一 (均一) など)。に等しい
ここで、 は回転子巻線の巻数、 は固定子極の磁場誘導、 は回転子巻線の電流 [A]、 は巻線の作動部分の長さ [m]、 は距離回転子軸から回転子巻線ターンの動作部分まで (半径) [m] , - 固定子の南北極の方向と回転子の同じ方向との間の角度の正弦 [rad], - 角速度[ラジアン/秒]、- 時間 [秒]。
この設計のモーターでは、ブラシの角度幅とコレクターのプレート (ラメラ) 間の角度ギャップが存在するため、ブラシによって動的に永久的に短絡されるローター巻線の部分があります。 回転子巻線の短絡部分の数は、ブラシの数と同じです。 回転子巻線のこれらの短絡部分は、総トルクの生成には関与しません。
1つのコレクターを備えたエンジンのローターのリスケージ部分の合計は、次のようになります。
![]() ここで、n はブラシの数、アルファは 1 つのブラシの角度幅 [ラジアン] です。
ここで、n はブラシの数、アルファは 1 つのブラシの角度幅 [ラジアン] です。
ブラシによって短絡されたトルクの部分を考慮せずに、1 回転あたりの電流によるフレーム (ターン) の平均トルク s は、積分トルク曲線の下の面積を周期の長さ (1 回転) で割った値に等しくなります。 = ):
米。 2 極固定子と 3 極回転子を備えた 2 DC 整流子モーター
図のエンジン。 2は、顕著な極と1つの巻線を備えたステータ上の1つの電磁石(2極ステータ)、顕著な極と3つの巻線を備えた3極ロータ(ロータ巻線はスターまたはデルタで接続できます)、ブラシコレクタで構成されています3 つのプレート (ラメラ) と 2 つのブラシで組み立てます。 ローターのどの位置からでもセルフスタートが可能です。 2極回転子のモーターに比べトルクムラが少ない(図1)。
「AC モーター」という名前は同じ略語 - DCT を持っているため、略語 DCT (DC モーター) は残念です。 ただし、AC モーターは非同期 (AD) と同期 (SD) に分けられるため、略称 DPT は DC モーターと呼ばれます。
ステーター
ブラシによって短絡されたトルクの部分を考慮しないと、1 回転あたりの平均トルク (周期) は、積分トルク曲線の下の領域を周期の長さで割った値に等しくなります。
巻線のターン数が s の場合
固定子極の均一な磁場で電流を流す 2 つのループ
マシンのローターに2番目のフレームを取り付け、最初のフレームに対して角度π/ 2だけシフトすると、4極ローターが得られます。 2 番目のフレームの瞬間:
両方のフレームの合計モーメント:
このように、トルクはローターの回転角度に依存することがわかりますが、ムラは1フレームよりも少なくなります。 さらに、ローターの任意の位置からの自己始動が追加されます。 この場合、2 番目のフレームには 2 番目のコレクター (ブラシ コレクター アセンブリ) が必要です。 両方のノードは並列に接続されていますが、フレームワーク内の電流スイッチングは、フレームワーク内の電流が最小の間隔で発生します。 シリアル接続フレームの 1 つで現在の切り替え (サーキット ブレーク) が発生します。 最大電流別のフレームで。 実際には、ブラシの角度幅 α [rad] がコレクター プレート (ラメラ) 間のギャップ β [rad] の角度幅よりもわずかに小さいという事実により、トルク曲線の下にある 8 つの小さな部品は、次の値に等しくなります。
 、ここで Δ = β − α は、総トルクの作成には関与しません。
、ここで Δ = β − α は、総トルクの作成には関与しません。
固定子極の不均一な磁場に電流が流れているフレーム
固定子極の磁場が不均一で、法律に従ってフレームロッドに対して変化する場合
その場合、1 つのロッドのトルクは次のようになります。
2本のロッド用
コイルのフレーム用
トルク曲線の下の 4 つの部分は、
 .
.
ブラシによって短絡されたトルクの部分を考慮しないと、1 回転あたりの平均トルク (周期) は、積分曲線の下の面積を周期の長さで割った値に等しくなります。
巻線のターン数が s の場合
固定子極の不均一な磁場で電流を流す 2 つのループ
2 番目の (コサイン) フレーム については、
2 番目の (コサイン) フレームからのトルクは次のようになります。
両方のフレームからの総トルクは等しい
それらの。 は一定で、ローターの回転角度には依存しません。
実際には、ギャップにより、トルク曲線の下の 8 つの小さな部分は等しくなります。
 各
各
トルクの生成には関与しません。
回転子は永久磁石で、固定子巻線は切り替えられます 電子回路- インバーター。 ブラシレス モーターには、単相 (2 つの「デッド スポット」)、2 相 (サイン/コサイン)、3 相、またはそれ以上の相があります。
整流器 (ブリッジ) を備えたブラシレス DC モーターは、ユニバーサル コレクター モーター (UKD) を置き換えることができます。
DPT管理
DPTの機械的特性
DCT シャフトのモーメントに対する周波数の依存性。 グラフとして表示されます。 横軸 (横軸) はローター シャフトのモーメント、縦軸 (縦軸) はローター速度です。 DPT の機械的特性は、負の勾配を持つ直線です。
DCT の機械的特性は、回転子巻線の特定の供給電圧で構築されます。 電源電圧のいくつかの値の特性を構築する場合、DCTの機械的特性のファミリーについて話します。
特性 DPT の調整
DC モーターの回転子巻線の供給電圧に対する回転子速度の依存性。 グラフとして表示されます。 横軸(横軸)は回転子巻線の供給電圧、縦軸(縦軸)は回転子速度です。 DPT 制御特性は、正の傾きを持つ直線です。
DPT の制御特性は、エンジンによって開発された特定の瞬間に構築されます。 ローターシャフトのトルクのいくつかの値の制御特性を構築する場合、DPTの制御特性のファミリーについて話します。